Potrebbero piacerti anche
- Auto Matic Flight Controll 4-2Documento141 pagineAuto Matic Flight Controll 4-2tarakae04Nessuna valutazione finora
- 5 Process ControlDocumento79 pagine5 Process ControlGurunath EpiliNessuna valutazione finora
- Maths Olympiad Class 4 0Documento8 pagineMaths Olympiad Class 4 0Bhavesh Desai75% (16)
- SITHKOP005 AssessmentDocumento18 pagineSITHKOP005 Assessment方翔Nessuna valutazione finora
- Spelling Bee Study Words by GradeDocumento8 pagineSpelling Bee Study Words by Gradealbert100% (1)
- Dcs ProgramDocumento239 pagineDcs Programkishoreprithika80% (5)
- Process control modes and tuning methodsDocumento23 pagineProcess control modes and tuning methodsMuhammad Ibad AlamNessuna valutazione finora
- Practical Process ControlDocumento325 paginePractical Process Controlpanchogancho100% (1)
- Process Control BoilerDocumento70 pagineProcess Control BoilerSteve WanNessuna valutazione finora
- Chemical Process Dynamics, Instrumentation & Control IntroductionDocumento44 pagineChemical Process Dynamics, Instrumentation & Control IntroductionKhairul Imran Azman75% (4)
- Cameroon University Course on Process Instrumentation and ControlDocumento41 pagineCameroon University Course on Process Instrumentation and ControlFRANCK DAMSSSNessuna valutazione finora
- Fisher Rosemount - Cascade PDFDocumento8 pagineFisher Rosemount - Cascade PDFkishoreprithikaNessuna valutazione finora
- Development of Improved Pid Controller For Single-Effect EvaporatorDocumento4 pagineDevelopment of Improved Pid Controller For Single-Effect Evaporatoresatjournals100% (1)
- DMC Controllers PDFDocumento2 pagineDMC Controllers PDFChintan BadamiNessuna valutazione finora
- Basic Concepts of Process ControlDocumento34 pagineBasic Concepts of Process ControlDozdi100% (5)
- Process Temperature Control Using PID and LabVIEWDocumento17 pagineProcess Temperature Control Using PID and LabVIEWManish SinghNessuna valutazione finora
- Multivariable Predictive Control: Applications in IndustryDa EverandMultivariable Predictive Control: Applications in IndustryNessuna valutazione finora
- PT326Documento12 paginePT326Asok Suthakar50% (2)
- Jay H Lee - MPC Lecture NotesDocumento137 pagineJay H Lee - MPC Lecture NotesVnomiksNessuna valutazione finora
- Concept of Process Control - Multiserve Session 1 PDFDocumento67 pagineConcept of Process Control - Multiserve Session 1 PDFAliHassanNessuna valutazione finora
- Process Instrumentation and Control SystemDocumento78 pagineProcess Instrumentation and Control SystemMorgen Mukamwi100% (1)
- Fractionation Tower Controls-Part 1Documento38 pagineFractionation Tower Controls-Part 1Rebekah Schmidt100% (1)
- ChE 441 - Process Control Student NotesDocumento207 pagineChE 441 - Process Control Student NotesDavidTobinNessuna valutazione finora
- Real-Time Optimization of AcetaldehydeDocumento10 pagineReal-Time Optimization of AcetaldehydeSadiq BashaNessuna valutazione finora
- Process Dynamics and ControlDocumento31 pagineProcess Dynamics and ControlKim Joon sungNessuna valutazione finora
- Process Control 1Documento80 pagineProcess Control 1بلال مهناءNessuna valutazione finora
- Cascade Control PDFDocumento4 pagineCascade Control PDFjhuskanovicNessuna valutazione finora
- Distillation Columns Risk Assessment When The Regular Hazop Evaluation Is Not EnoughDocumento7 pagineDistillation Columns Risk Assessment When The Regular Hazop Evaluation Is Not Enoughmyusuf_engineerNessuna valutazione finora
- CHE201ch12Documento25 pagineCHE201ch12chandro57Nessuna valutazione finora
- Model Reference Adaptive ControlDocumento57 pagineModel Reference Adaptive ControlmervebayrakNessuna valutazione finora
- Lect 1 Introduction To Process ControlDocumento4 pagineLect 1 Introduction To Process ControlZaidoon MohsinNessuna valutazione finora
- CAP Question Sample PDFDocumento36 pagineCAP Question Sample PDF-' NandoNessuna valutazione finora
- 01 - Introduction To Process ControlDocumento59 pagine01 - Introduction To Process Controlafoead100% (1)
- Seborg Process Control Chapter 1Documento50 pagineSeborg Process Control Chapter 1Tanvir AhmedNessuna valutazione finora
- Cascade Control: (Chap 9 in Book and 10 in Edition 2)Documento6 pagineCascade Control: (Chap 9 in Book and 10 in Edition 2)yungPNessuna valutazione finora
- C&IDocumento28 pagineC&ISam100% (1)
- Cs3000 Operation With FfcsDocumento106 pagineCs3000 Operation With FfcsNikhil S Pillai100% (3)
- 1 Process Dynamics and Control No1Documento32 pagine1 Process Dynamics and Control No1Ayushi100% (1)
- Chapter 1Documento24 pagineChapter 1Anonymous tytJlPojNessuna valutazione finora
- Feedforward ControlDocumento7 pagineFeedforward Controlnilanjana89Nessuna valutazione finora
- IOSR JournalsDocumento6 pagineIOSR JournalsInternational Organization of Scientific Research (IOSR)Nessuna valutazione finora
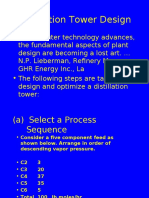
- Distillation Tower DesignDocumento65 pagineDistillation Tower DesignAntonio SilvaNessuna valutazione finora
- Why Effective Process Control is Required for Safety, Quality and ProfitDocumento6 pagineWhy Effective Process Control is Required for Safety, Quality and ProfitSebastien PaulNessuna valutazione finora
- Hydrocracking PDFDocumento89 pagineHydrocracking PDFAkarsha Srivastava100% (12)
- 660 MW Supercritical BoilerDocumento89 pagine660 MW Supercritical BoilerAshvani Shukla100% (5)
- Controller Tuning Methods for PID LoopsDocumento5 pagineController Tuning Methods for PID LoopsSubham SikdarNessuna valutazione finora
- Chapter 4 - Process Control and InstrumentationDocumento42 pagineChapter 4 - Process Control and InstrumentationaimanrslnNessuna valutazione finora
- Process Dynamics and Control: CHE302, Fall 2001 Professor Dae Ryook YangDocumento29 pagineProcess Dynamics and Control: CHE302, Fall 2001 Professor Dae Ryook YangTewodros MathewosNessuna valutazione finora
- Cascade ControlDocumento17 pagineCascade Controlمحمد سلامNessuna valutazione finora
- UAE University College of Engineering Training and Graduation Project UnitDocumento100 pagineUAE University College of Engineering Training and Graduation Project UnitPortia ShilengeNessuna valutazione finora
- Canadian Institute of Mines Metallurgy and Petroleum Peru Branch ICM-PerúDocumento68 pagineCanadian Institute of Mines Metallurgy and Petroleum Peru Branch ICM-PerúRicardo Castillo RamirezNessuna valutazione finora
- Alkylation Process OverviewDocumento7 pagineAlkylation Process OverviewVasthadu Vasu Khanan DLNessuna valutazione finora
- PROCESS CONTROL ANALYSIS AND DESIGNDocumento60 paginePROCESS CONTROL ANALYSIS AND DESIGNPaul RwomwijhuNessuna valutazione finora
- Ce-307 - Chemical Engineering DesignDocumento41 pagineCe-307 - Chemical Engineering Designmuhammad_asim_10Nessuna valutazione finora
- Overall Flowsheet Simulation Benzene Cyclohexane TW6Documento7 pagineOverall Flowsheet Simulation Benzene Cyclohexane TW6Dikshit PankhaniyaNessuna valutazione finora
- RXN CH 5Documento68 pagineRXN CH 5Yonas AddamNessuna valutazione finora
- Liquid Liquid Extraction in A Packed BedDocumento26 pagineLiquid Liquid Extraction in A Packed BedAr SaidNessuna valutazione finora
- A List of Catalytic Reactions in Petrochemical Industry For Important Base ChemicalsDocumento63 pagineA List of Catalytic Reactions in Petrochemical Industry For Important Base ChemicalssithvincentNessuna valutazione finora
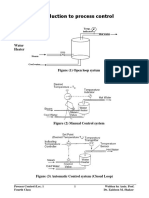
- Introduction To Process ControlDocumento7 pagineIntroduction To Process ControlaliNessuna valutazione finora
- Optimise Heat Exchanger Network DesignDocumento2 pagineOptimise Heat Exchanger Network DesignAmirul AfiqNessuna valutazione finora
- AFPT921 Air Flow Pressure Temperature Control TrainingDocumento2 pagineAFPT921 Air Flow Pressure Temperature Control TrainingKamalanathen ChlvnNessuna valutazione finora
- Expt. 4 - Pressure ControlDocumento16 pagineExpt. 4 - Pressure Controlpleco4meNessuna valutazione finora
- Chap01 - A Career in Process ControlDocumento44 pagineChap01 - A Career in Process ControlKeith MaddenNessuna valutazione finora
- Pid Temperature ControlDocumento6 paginePid Temperature ControlAnonymous OpRuX6VNessuna valutazione finora
- Process Dynamics and Control SolutionsDocumento27 pagineProcess Dynamics and Control Solutionsciotti6209Nessuna valutazione finora
- Level Flow ControlDocumento6 pagineLevel Flow Controlarpit gargNessuna valutazione finora
- Qeee Solution DocumnetDocumento9 pagineQeee Solution DocumnetAkshay B100% (1)
- Lecture 9Documento23 pagineLecture 9amirmasoudNessuna valutazione finora
- Introduction To CHEMCADDocumento6 pagineIntroduction To CHEMCADIsmanto Siringo-ringoNessuna valutazione finora
- PID Controller Design and Tuning for Lag-Dominant ProcessesDocumento33 paginePID Controller Design and Tuning for Lag-Dominant ProcessesGesang Rakhmad UtomoNessuna valutazione finora
- Process Control: Designing Process and Control Systems For Dynamic PerformanceDocumento29 pagineProcess Control: Designing Process and Control Systems For Dynamic PerformanceNabila Agnasia Desmara100% (1)
- Allyl BDocumento9 pagineAllyl BDemet AcargilNessuna valutazione finora
- CPB30004 Process Dynamics and Control Experiment 5: Heat Exchanger Process Control Lab ReportDocumento24 pagineCPB30004 Process Dynamics and Control Experiment 5: Heat Exchanger Process Control Lab ReportSiti Hajar Mohamed100% (1)
- CHE 4170 Design Project HYSYSDocumento16 pagineCHE 4170 Design Project HYSYSPhan NeeNessuna valutazione finora
- Sugar Factory Instrumentation and Control SystemsDocumento110 pagineSugar Factory Instrumentation and Control SystemsMesafint kassieNessuna valutazione finora
- SM3Documento3 pagineSM3kishoreprithikaNessuna valutazione finora
- SM3Documento3 pagineSM3kishoreprithikaNessuna valutazione finora
- SM1 PDFDocumento1 paginaSM1 PDFkishoreprithikaNessuna valutazione finora
- SM3Documento3 pagineSM3kishoreprithikaNessuna valutazione finora
- RefineryDocumento28 pagineRefinerykishoreprithikaNessuna valutazione finora
- Recalculate and Resize DataLink Code ExampleDocumento2 pagineRecalculate and Resize DataLink Code ExamplekishoreprithikaNessuna valutazione finora
- MDB Chemical Reactor Data and SpecificationsDocumento7 pagineMDB Chemical Reactor Data and SpecificationskishoreprithikaNessuna valutazione finora
- ThirukkuralDocumento67 pagineThirukkurallathapriya12375% (4)
- Maths 8Documento10 pagineMaths 8kishoreprithikaNessuna valutazione finora
- RefineryDocumento14 pagineRefinerykishoreprithikaNessuna valutazione finora
- 2008 Npra Iso Therming PresentationDocumento26 pagine2008 Npra Iso Therming PresentationGarry DavidNessuna valutazione finora
- 2005 Rev Pre FlashDocumento5 pagine2005 Rev Pre Flashghasem_726990287Nessuna valutazione finora
- APPLICATION GUIDE - PID FunctionDocumento43 pagineAPPLICATION GUIDE - PID FunctioniedmondNessuna valutazione finora
- Design Guidelines For Chemical Treatments in Distillation ColumnsDocumento15 pagineDesign Guidelines For Chemical Treatments in Distillation ColumnsChiodo72Nessuna valutazione finora
- Centumvp1 PDFDocumento86 pagineCentumvp1 PDFkishoreprithikaNessuna valutazione finora
- APPLICATION GUIDE - PID FunctionDocumento43 pagineAPPLICATION GUIDE - PID FunctioniedmondNessuna valutazione finora
- Free NSO Sample Paper: ScienceDocumento9 pagineFree NSO Sample Paper: Sciencekishoreprithika100% (1)
- Class 5Documento8 pagineClass 5Edi WijayaNessuna valutazione finora
- Excel 2Documento28 pagineExcel 2kishoreprithikaNessuna valutazione finora
- Excel 2010 Training - CUNYDocumento32 pagineExcel 2010 Training - CUNYkishoreprithika100% (1)
- DCS BasicsDocumento111 pagineDCS BasicsobelixensemNessuna valutazione finora
- Excel 2010 Keyboard ShortcutsDocumento2 pagineExcel 2010 Keyboard ShortcutskishoreprithikaNessuna valutazione finora
- 2008 Npra Iso Therming PresentationDocumento26 pagine2008 Npra Iso Therming PresentationGarry DavidNessuna valutazione finora
- ExcelDocumento371 pagineExcelbakhshiNessuna valutazione finora
- 6 - Tuning and Control SchemesDocumento34 pagine6 - Tuning and Control SchemesZahidNessuna valutazione finora
- 03 - Lectures of Load Forecasting - NnatDocumento89 pagine03 - Lectures of Load Forecasting - NnatMuhammad Yunus Nurdin0% (1)
- Process Control: WWW - Control-Systems-Principles - Co.uk. CE117 Process ControlDocumento6 pagineProcess Control: WWW - Control-Systems-Principles - Co.uk. CE117 Process ControlSharifah Zulaikha BenYahyaNessuna valutazione finora
- Flow Control March 2020 PDFDocumento37 pagineFlow Control March 2020 PDFAlberto Fernández MarínNessuna valutazione finora
- Advanced Level Control AlgorithmDocumento10 pagineAdvanced Level Control AlgorithmLuthandoNessuna valutazione finora
- Neural Networks Model Dough Rising Process in Proofing ChambersDocumento6 pagineNeural Networks Model Dough Rising Process in Proofing ChambersSyaiful MansyurNessuna valutazione finora
- Process Instrumentation 2Documento8 pagineProcess Instrumentation 2Aditya RasalNessuna valutazione finora
- Computer Simulation of pH Control in Water CoagulationDocumento58 pagineComputer Simulation of pH Control in Water Coagulationkingsley peprahNessuna valutazione finora
- Control and Performance EvaluationDocumento8 pagineControl and Performance EvaluationWed CornelNessuna valutazione finora
- Eee481 - Fa09 - CCSDocumento3 pagineEee481 - Fa09 - CCSSai KamalaNessuna valutazione finora
- NARXDocumento10 pagineNARXAmar Kant Gautam100% (1)
- Plant InversionDocumento19 paginePlant InversionMaher HammamiNessuna valutazione finora
- Humanoid RoboticsDocumento13 pagineHumanoid RoboticsWalter Shields100% (4)
- Cascade, Ratio, and Feedforward ControlDocumento47 pagineCascade, Ratio, and Feedforward ControlSteaphnie_Sava_5881Nessuna valutazione finora
- Control Architectures: Feedback, Feed Forward, Ratio, and Cascade ControlDocumento16 pagineControl Architectures: Feedback, Feed Forward, Ratio, and Cascade ControlAhmad Ulin NuhaNessuna valutazione finora
- Lecture-7 Block Diagram Representation of Control SystemsDocumento41 pagineLecture-7 Block Diagram Representation of Control Systemsusama asifNessuna valutazione finora
- Journal of Manufacturing Processes: Peter Groche, Florian Hoppe, Daniel Hesse, Stefan CalmanoDocumento9 pagineJournal of Manufacturing Processes: Peter Groche, Florian Hoppe, Daniel Hesse, Stefan CalmanoheryuanoNessuna valutazione finora
- Process Control in Chemical Engineering by Using MatlabDocumento67 pagineProcess Control in Chemical Engineering by Using MatlabedelmandalaNessuna valutazione finora
- Introduction To The Principles of Feedback: Topics To Be Covered IncludeDocumento40 pagineIntroduction To The Principles of Feedback: Topics To Be Covered IncludeAliNessuna valutazione finora
- Active Noise Control Systems Algorithms PDFDocumento7 pagineActive Noise Control Systems Algorithms PDFSanti Ago0% (1)
- Evaluation Control-NewDocumento34 pagineEvaluation Control-NewNimish KumarNessuna valutazione finora