Potrebbero piacerti anche
- 4.circle Diagram of Three Phase Induction Motor From No Load & Blocked Rotor TestsDocumento4 pagine4.circle Diagram of Three Phase Induction Motor From No Load & Blocked Rotor Testsmandadi_sailesh50% (2)
- DC MOTORS: HOW THEY WORK AS GENERATORS & MOTORSDocumento7 pagineDC MOTORS: HOW THEY WORK AS GENERATORS & MOTORSKelvin LiewNessuna valutazione finora
- Lectures Synchronous MachinesDocumento47 pagineLectures Synchronous MachinesSaddy CoolNessuna valutazione finora
- Synchronous Machines GuideDocumento48 pagineSynchronous Machines GuideMehtab AhmedNessuna valutazione finora
- Synchronous Generator I PDFDocumento38 pagineSynchronous Generator I PDFjcrodriguez8350% (2)
- Electrical Power Systems: Synchronous GeneratorDocumento54 pagineElectrical Power Systems: Synchronous GeneratorNorhatini IbrahimNessuna valutazione finora
- CH - 5 Synchronous MachinesDocumento28 pagineCH - 5 Synchronous MachinesNAHOM ANTENEHNessuna valutazione finora
- PS Lab ManualDocumento25 paginePS Lab ManualPRAVEEN KUMAR SINGHNessuna valutazione finora
- Power Systems AssignmentDocumento12 paginePower Systems AssignmentJbmulindwaNessuna valutazione finora
- AC Drives: Dr. Adel A. El-Samahy Department of Electrical Engineering University of HelwanDocumento25 pagineAC Drives: Dr. Adel A. El-Samahy Department of Electrical Engineering University of Helwanadelelsamahy5958Nessuna valutazione finora
- Synchronous Generators: Construction and Equivalent Circuit ModelDocumento34 pagineSynchronous Generators: Construction and Equivalent Circuit ModelpayalNessuna valutazione finora
- Synchronous GeneratorsDocumento62 pagineSynchronous GeneratorsAkira ZamudioNessuna valutazione finora
- Symmetrical FaultsDocumento134 pagineSymmetrical FaultsCaribNessuna valutazione finora
- Electrical Machine-II Laboratory Manual B.Tech, 3 Yr, 5 Semester, Electrical Engg. DeptDocumento28 pagineElectrical Machine-II Laboratory Manual B.Tech, 3 Yr, 5 Semester, Electrical Engg. DeptMoumi PanditNessuna valutazione finora
- Determining Rotor Leakage ReactanceDocumento5 pagineDetermining Rotor Leakage ReactanceGaspar RodríguezNessuna valutazione finora
- Lecture 5Documento45 pagineLecture 5Eric XVENessuna valutazione finora
- E M 1 Lab ManualDocumento63 pagineE M 1 Lab ManualdsparanthamanNessuna valutazione finora
- Synchronous Machine TestsDocumento10 pagineSynchronous Machine TestsItalo ChiarellaNessuna valutazione finora
- Electrical Machines Lab-II 5. Regulation of Three-Phase Alternator by Synchronous Impedance MethodDocumento6 pagineElectrical Machines Lab-II 5. Regulation of Three-Phase Alternator by Synchronous Impedance Methodcholleti sriramNessuna valutazione finora
- PS Lab ManualDocumento25 paginePS Lab ManualPhani PhaniNessuna valutazione finora
- Power Systems TheoryDocumento13 paginePower Systems TheoryGitta JoshuaNessuna valutazione finora
- Three-Phase Induction MotorDocumento10 pagineThree-Phase Induction MotorMadarwi SarwaNessuna valutazione finora
- Lectures Synchronous MachinesDocumento47 pagineLectures Synchronous MachinesJigar PatelNessuna valutazione finora
- Test Circuit ParametersDocumento5 pagineTest Circuit ParametersSamsudin Ahmad100% (1)
- Machines Dcmotors 2 April 14Documento20 pagineMachines Dcmotors 2 April 14Pola RismaNessuna valutazione finora
- Regulation of AlternatorDocumento6 pagineRegulation of Alternatorkudupudinagesh100% (1)
- Chapter 2 Synchronous MachinesDocumento53 pagineChapter 2 Synchronous MachinesayumailNessuna valutazione finora
- Synchronous Generator TestsDocumento22 pagineSynchronous Generator TestsReza Pratama Nugraha0% (1)
- Synchronous Machines Rev 1Documento9 pagineSynchronous Machines Rev 1Nasri JamaludinNessuna valutazione finora
- EECT1REVDocumento17 pagineEECT1REVSanyam JainNessuna valutazione finora
- Shunt GeneratorDocumento6 pagineShunt GeneratorudhaiiNessuna valutazione finora
- Induction MachineDocumento48 pagineInduction MachinechethanNessuna valutazione finora
- Synchronous GeneratorDocumento28 pagineSynchronous GeneratormohammedNessuna valutazione finora
- Exp. 3 - Load Test and Equivalent Circuit Determination On Three Phase Squirrel Cage Induction Motor andDocumento9 pagineExp. 3 - Load Test and Equivalent Circuit Determination On Three Phase Squirrel Cage Induction Motor andSanjay MeenaNessuna valutazione finora
- Unit 6 Alternator (Synchronous Generator) : StructureDocumento29 pagineUnit 6 Alternator (Synchronous Generator) : StructureMahir Asif Shadman100% (1)
- MECHDocumento36 pagineMECHPalak AriwalaNessuna valutazione finora
- GTCL 2016Documento4 pagineGTCL 2016Yasir AlamNessuna valutazione finora
- Eep 203 Electromechanics LaboratoryDocumento65 pagineEep 203 Electromechanics Laboratorysourabh_rohillaNessuna valutazione finora
- EE6365 – ELECTRICAL ENGINEERING LABORATORY MANUALDocumento58 pagineEE6365 – ELECTRICAL ENGINEERING LABORATORY MANUALjk100% (1)
- Blocked Rotor TestDocumento11 pagineBlocked Rotor TestIjabi100% (1)
- Synchronous Motor Test TestDocumento5 pagineSynchronous Motor Test TestChidamparam PalaniyappanNessuna valutazione finora
- Obseravation Sheet MyDocumento17 pagineObseravation Sheet MyManoj JayaruwanNessuna valutazione finora
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesDa EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesNessuna valutazione finora
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Da EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Nessuna valutazione finora
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Da EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Valutazione: 2.5 su 5 stelle2.5/5 (3)
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlDa EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlValutazione: 5 su 5 stelle5/5 (1)
- Differential Forms on Electromagnetic NetworksDa EverandDifferential Forms on Electromagnetic NetworksValutazione: 4 su 5 stelle4/5 (1)
- Power, Testing, and Grounding of Electronic SystemsDa EverandPower, Testing, and Grounding of Electronic SystemsNessuna valutazione finora
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkDa EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNessuna valutazione finora
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetDa EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNessuna valutazione finora
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetDa EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetValutazione: 2 su 5 stelle2/5 (1)
- STEM: Science, Technology, Engineering and Maths Principles Teachers Pack V10Da EverandSTEM: Science, Technology, Engineering and Maths Principles Teachers Pack V10Nessuna valutazione finora
- 110 Waveform Generator Projects for the Home ConstructorDa Everand110 Waveform Generator Projects for the Home ConstructorValutazione: 4 su 5 stelle4/5 (1)
- Power System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)Da EverandPower System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)Nessuna valutazione finora
- Some Power Electronics Case Studies Using Matlab Simpowersystem BlocksetDa EverandSome Power Electronics Case Studies Using Matlab Simpowersystem BlocksetNessuna valutazione finora
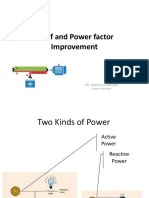
- Power Factor ImprovementDocumento25 paginePower Factor ImprovementChamila SumathiratnaNessuna valutazione finora
- Energy Work and Linear MomentumDocumento33 pagineEnergy Work and Linear MomentumChamila SumathiratnaNessuna valutazione finora
- Universal Motor Operation & ApplicationsDocumento10 pagineUniversal Motor Operation & ApplicationsChamila SumathiratnaNessuna valutazione finora
- Universal Motor Operation & ApplicationsDocumento10 pagineUniversal Motor Operation & ApplicationsChamila SumathiratnaNessuna valutazione finora
- GeneratorsDocumento22 pagineGeneratorsChamila SumathiratnaNessuna valutazione finora
- Conduction in The Cylindrical Geometry PDFDocumento12 pagineConduction in The Cylindrical Geometry PDFNabhan RusydiNessuna valutazione finora
- Transformers: Ms. Chamila Sumathiratna Senior LecturerDocumento59 pagineTransformers: Ms. Chamila Sumathiratna Senior LecturerChamila SumathiratnaNessuna valutazione finora
- Electricity Tariff: Ms Chamila Sumathiratna Senior LeturerDocumento11 pagineElectricity Tariff: Ms Chamila Sumathiratna Senior LeturerChamila SumathiratnaNessuna valutazione finora
- Lighting: Chamila Sumathiratna Senior LecturerDocumento17 pagineLighting: Chamila Sumathiratna Senior LecturerChamila SumathiratnaNessuna valutazione finora
- 1 Introduction To Power Electronics2Documento14 pagine1 Introduction To Power Electronics2Chamila SumathiratnaNessuna valutazione finora
- TG Sinhala GD 7Documento99 pagineTG Sinhala GD 7Sahitya Nirmanakaranaya Sahitya NirmanakaranayaNessuna valutazione finora
- Bipolar Junction TransistorDocumento18 pagineBipolar Junction TransistorChamila SumathiratnaNessuna valutazione finora
- NPSH SimplifiedDocumento4 pagineNPSH Simplifiedtexwan_Nessuna valutazione finora
- Blooms TaxonomyDocumento1 paginaBlooms TaxonomysivaeeinfoNessuna valutazione finora
- Chapter 1Documento33 pagineChapter 1Chamila SumathiratnaNessuna valutazione finora
- Energy Work and Linear MomentumDocumento33 pagineEnergy Work and Linear MomentumChamila SumathiratnaNessuna valutazione finora
- Relative Velocity Along Straight Lines ExplainedDocumento4 pagineRelative Velocity Along Straight Lines ExplainedChamila SumathiratnaNessuna valutazione finora
- Diodes EstDocumento2 pagineDiodes EstChamila SumathiratnaNessuna valutazione finora
- Lab 07 - DC MotorsDocumento9 pagineLab 07 - DC MotorsChamila SumathiratnaNessuna valutazione finora
- Starting Methods of IMDocumento24 pagineStarting Methods of IMChamila SumathiratnaNessuna valutazione finora
- Lab 07 - DC MotorsDocumento9 pagineLab 07 - DC MotorsChamila SumathiratnaNessuna valutazione finora
- 6 Operating Characteristics Od Induction MotorDocumento24 pagine6 Operating Characteristics Od Induction MotorChamila SumathiratnaNessuna valutazione finora
- Diode RectifiersDocumento22 pagineDiode RectifiersChamila SumathiratnaNessuna valutazione finora
- Bipolar Junction Transistors (BJT) : NPN PNPDocumento44 pagineBipolar Junction Transistors (BJT) : NPN PNPAli AhmadNessuna valutazione finora
- Government College Of Technology, Coimbatore- 641 013. Applied Mathematics and Power Electronics CoursesDocumento47 pagineGovernment College Of Technology, Coimbatore- 641 013. Applied Mathematics and Power Electronics CoursesChamila SumathiratnaNessuna valutazione finora
- Asics OF Agnetism Lectromagnetism: Chamila Sumathiratna-Senior Lecturer Faculty of Industrial and Vocational TechnologyDocumento29 pagineAsics OF Agnetism Lectromagnetism: Chamila Sumathiratna-Senior Lecturer Faculty of Industrial and Vocational TechnologyChamila SumathiratnaNessuna valutazione finora
- DiodeDocumento24 pagineDiodeChamila SumathiratnaNessuna valutazione finora
- Effects of rotor resistance on induction motor torqueDocumento31 pagineEffects of rotor resistance on induction motor torquenovyjicinNessuna valutazione finora
- HD PDF PYC International Energy Conference 2019 Proceeding 1Documento340 pagineHD PDF PYC International Energy Conference 2019 Proceeding 1Muhamad Afkar Gumintang100% (1)
- Sustane To Install PK Clean's Plastic To Fuel Plant in Nova ScotiaDocumento2 pagineSustane To Install PK Clean's Plastic To Fuel Plant in Nova ScotiaPR.com100% (1)
- BCA Energy Performance Points CalculatorDocumento69 pagineBCA Energy Performance Points Calculatorသူ ရိန်Nessuna valutazione finora
- Heat Transfer EquipmentDocumento28 pagineHeat Transfer Equipmentdeepak.dce.meNessuna valutazione finora
- Power Electronics Converters, Applications, and DesignDocumento736 paginePower Electronics Converters, Applications, and Designaaaravin100% (7)
- TE 10000 KG - 6 M/min, Low Voltage Control With 1 Speed: Technical PropertiesDocumento7 pagineTE 10000 KG - 6 M/min, Low Voltage Control With 1 Speed: Technical PropertiesantonpeleleNessuna valutazione finora
- Design and Development of Small Electric Vehicle Using MATLAB/SimulinkDocumento1 paginaDesign and Development of Small Electric Vehicle Using MATLAB/SimulinkM VetriselviNessuna valutazione finora
- Ceylon Electricity BoardDocumento85 pagineCeylon Electricity BoardAnonymous MDkp0hnb3lNessuna valutazione finora
- Physical separation between power and data cablesDocumento16 paginePhysical separation between power and data cablesMouna Nj100% (1)
- IIT Roorkee PG Power Courses ListDocumento61 pagineIIT Roorkee PG Power Courses ListAnkit YadavNessuna valutazione finora
- Six Elements and Chinese MedicineDocumento182 pagineSix Elements and Chinese MedicinePedro Maia67% (3)
- 2 Lodore Grove, JARROW, NE32 4AFDocumento4 pagine2 Lodore Grove, JARROW, NE32 4AFAsma HussainNessuna valutazione finora
- Altivar AFE (Active Front End) - VW3A7252Documento3 pagineAltivar AFE (Active Front End) - VW3A7252Huy Ngô PhùngNessuna valutazione finora
- Research CapstoneDocumento21 pagineResearch Capstonemarilou biolNessuna valutazione finora
- ERA Annual Report 2013/14Documento56 pagineERA Annual Report 2013/14sedianpoNessuna valutazione finora
- Taliesin West Case Study: Sustainable Lessons from Frank Lloyd WrightDocumento17 pagineTaliesin West Case Study: Sustainable Lessons from Frank Lloyd WrightGeroke SzekeresNessuna valutazione finora
- DECENTRALIZED CONTROL FOR MODULAR ISOP INVERTERSDocumento4 pagineDECENTRALIZED CONTROL FOR MODULAR ISOP INVERTERSBrightworld ProjectsNessuna valutazione finora
- Daily Lesson Plan: in Science 6Documento75 pagineDaily Lesson Plan: in Science 6Bryan Bangiban100% (2)
- Earth Science 11 Energy ResourcesDocumento3 pagineEarth Science 11 Energy ResourcesJ R Caballero Dubluis100% (1)
- Petrosil Glycerine ReportDocumento8 paginePetrosil Glycerine Reportvishi.segalNessuna valutazione finora
- Check all bolts on the DLC panel are tight.2. Check the cable connection on the DLC panel,aDocumento27 pagineCheck all bolts on the DLC panel are tight.2. Check the cable connection on the DLC panel,aAlavi Almer Zayn ApandiNessuna valutazione finora
- Climate Change Review: Greenhouse Gases & EvidenceDocumento2 pagineClimate Change Review: Greenhouse Gases & EvidenceNatalie OrrangeNessuna valutazione finora
- Rxsf1 - DC Supvn Self ResetDocumento2 pagineRxsf1 - DC Supvn Self Resetlalithakiranmai0% (1)
- Comprehensive Study on Electrical Installation Fire Safety StandardsDocumento21 pagineComprehensive Study on Electrical Installation Fire Safety StandardsNalinNessuna valutazione finora
- Wiring Diagrams: VR6 Voltage RegulatorDocumento21 pagineWiring Diagrams: VR6 Voltage Regulatorgeorgi15685Nessuna valutazione finora
- Cne Micro Project ReportDocumento16 pagineCne Micro Project Reportsurajkapse514Nessuna valutazione finora
- Mariner 910 S - ENGDocumento2 pagineMariner 910 S - ENGNindi Widia Devi RahmasariNessuna valutazione finora
- Datasheet BlueSolar Charge Controller MPPT 250 70, 150 100 & 250 100 VE - Can ENDocumento2 pagineDatasheet BlueSolar Charge Controller MPPT 250 70, 150 100 & 250 100 VE - Can ENSpartan117 JohnNessuna valutazione finora
- Standard Capacitor CatalogDocumento2 pagineStandard Capacitor CatalogJhon FredyNessuna valutazione finora
- RBU 100H Operation Manual - V1.7Documento33 pagineRBU 100H Operation Manual - V1.7Muhammad TaimoorNessuna valutazione finora