Potrebbero piacerti anche
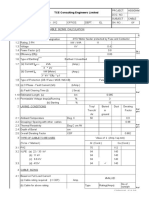
- Cable Sizing CalculationDocumento72 pagineCable Sizing CalculationHARI my songs100% (1)
- Equilibrium of A Rigid Body Rigid BodyDocumento41 pagineEquilibrium of A Rigid Body Rigid BodyJean Zyrelle AuronNessuna valutazione finora
- Rigid Body Equilibrium: Engineering Mechanics Lab 1 (MEE2018)Documento22 pagineRigid Body Equilibrium: Engineering Mechanics Lab 1 (MEE2018)Akeem100% (1)
- Stress and Strain RenewDocumento65 pagineStress and Strain Renewshafarizy100% (1)
- Vector Mechanics For Engineers: Statics: Free-Body Diagram of Rigid Body (Force-Couple System)Documento15 pagineVector Mechanics For Engineers: Statics: Free-Body Diagram of Rigid Body (Force-Couple System)skillzxivNessuna valutazione finora
- Chapter 4.a (Simple Truses)Documento24 pagineChapter 4.a (Simple Truses)LogarithemNessuna valutazione finora
- Formula Notes Som 35 33Documento46 pagineFormula Notes Som 35 33Devika shettyNessuna valutazione finora
- CE201 Statics Chap5Documento26 pagineCE201 Statics Chap5zeromeansNessuna valutazione finora
- Structural Analysis1 PDFDocumento142 pagineStructural Analysis1 PDFAkshit Raj Babbar Sher100% (1)
- 16 - Bit RISC Processor Design For Convolution Application Using Verilog HDLDocumento64 pagine16 - Bit RISC Processor Design For Convolution Application Using Verilog HDLchandra sekhar100% (1)
- Equilibrium of Rigid BodiesDocumento22 pagineEquilibrium of Rigid BodiesSpiro DourbalyNessuna valutazione finora
- 1 FrictionDocumento10 pagine1 FrictionRAMAKANT RANANessuna valutazione finora
- ARE Structures Cheat SheetDocumento4 pagineARE Structures Cheat SheetkrisNessuna valutazione finora
- Equilibrium of Rigid BodyDocumento41 pagineEquilibrium of Rigid BodyJaya KarthigaaNessuna valutazione finora
- V1 N2 1980 RabenhorstDocumento6 pagineV1 N2 1980 Rabenhorstraa2010Nessuna valutazione finora
- Notes Ch.2 Shearing Force and Bending MomentDocumento24 pagineNotes Ch.2 Shearing Force and Bending MomentCCC ChowNessuna valutazione finora
- Start Up and Commissioning of Chilled Water PumpsDocumento6 pagineStart Up and Commissioning of Chilled Water PumpsAlaa AnwerNessuna valutazione finora
- Slope Deflection MethodDocumento57 pagineSlope Deflection MethodpratyushaNessuna valutazione finora
- MTH510 Numerical Analysis: Text: CH 5 & 6Documento6 pagineMTH510 Numerical Analysis: Text: CH 5 & 6Winsle AnNessuna valutazione finora
- Engineering Mechanics (17CA03302) : Lecture NotesDocumento74 pagineEngineering Mechanics (17CA03302) : Lecture NotesBADINEHALSANDEEPNessuna valutazione finora
- Shear and Moment Diagram - Wikipedia, The Free EncyclopediaDocumento10 pagineShear and Moment Diagram - Wikipedia, The Free EncyclopediaPrabhat MishraNessuna valutazione finora
- Lesson 3. Deflection - Part 2 Area Moment MethodDocumento20 pagineLesson 3. Deflection - Part 2 Area Moment MethodCharizza Montarin CENessuna valutazione finora
- Friction AutoDocumento24 pagineFriction AutoSayyadh Rahamath BabaNessuna valutazione finora
- Lecture StaticsDocumento213 pagineLecture StaticsGirma FikreNessuna valutazione finora
- 1982 International Rectifier Hexfet Databook PDFDocumento472 pagine1982 International Rectifier Hexfet Databook PDFetmatsudaNessuna valutazione finora
- Overviews of StaticsDocumento70 pagineOverviews of StaticsJacous WcyNessuna valutazione finora
- Once Through: Steam GeneratorsDocumento21 pagineOnce Through: Steam GeneratorsrajrampallyNessuna valutazione finora
- Lecture StaticsDocumento213 pagineLecture StaticsradniksrbijeNessuna valutazione finora
- Hiley TableDocumento5 pagineHiley TableHanafiahHamzahNessuna valutazione finora
- Moment of InertiaDocumento56 pagineMoment of InertiaAyush 100ni100% (1)
- Petrom OMV Norm DEF 2001 Rom Eng Rev.2 2009-06-01Documento61 paginePetrom OMV Norm DEF 2001 Rom Eng Rev.2 2009-06-01luciandu100% (1)
- Engineering Mechanics Unit 1 QuestionsDocumento4 pagineEngineering Mechanics Unit 1 QuestionsShrey SanwariaNessuna valutazione finora
- MECH100 Lecture Chapter 4Documento42 pagineMECH100 Lecture Chapter 4Kristina PonceNessuna valutazione finora
- Friction Sample Question AnswersDocumento7 pagineFriction Sample Question AnswersIbrahim HossainNessuna valutazione finora
- Chapter 4.c (Frame& Machine)Documento26 pagineChapter 4.c (Frame& Machine)LogarithemNessuna valutazione finora
- CHAPTER 1 Introduction To StaticsDocumento39 pagineCHAPTER 1 Introduction To StaticsDavid MurphyNessuna valutazione finora
- Amos 1Documento134 pagineAmos 1Krishna Kumar AlagarNessuna valutazione finora
- ACC 104: Management Science: Pamantasan NG CabuyaoDocumento44 pagineACC 104: Management Science: Pamantasan NG CabuyaoHannah MeranoNessuna valutazione finora
- Simple Stress StrainDocumento141 pagineSimple Stress StrainvelavansuNessuna valutazione finora
- Engineering Mechanics DistributedForcesDocumento47 pagineEngineering Mechanics DistributedForcesChamith KarunadharaNessuna valutazione finora
- List of Moments of InertiaDocumento4 pagineList of Moments of InertiaBilal TayyabNessuna valutazione finora
- Statics Review PDFDocumento26 pagineStatics Review PDFSathyajith PinikeshiNessuna valutazione finora
- Mechanics of Solids Power-Point PresentationDocumento38 pagineMechanics of Solids Power-Point Presentationjust_friends199Nessuna valutazione finora
- Applications of VectorsDocumento12 pagineApplications of VectorsOliviaNessuna valutazione finora
- Indetermine StructureDocumento8 pagineIndetermine Structuremaloy100% (1)
- UNIT-1 Structural Analysis-1 220716Documento96 pagineUNIT-1 Structural Analysis-1 220716Azrin YusopNessuna valutazione finora
- Mechanics of Materials-1 - 2-Mark Question and AnswersDocumento10 pagineMechanics of Materials-1 - 2-Mark Question and AnswersSrikant PotluriNessuna valutazione finora
- 20.1 Introducing Set Notation: Learn How ToDocumento17 pagine20.1 Introducing Set Notation: Learn How ToMohd Afifuddin Hj HarunNessuna valutazione finora
- Engineering MechanicsDocumento37 pagineEngineering Mechanicser_paramjeetgillNessuna valutazione finora
- Scalar Quantity Magnitude: Vectors and ScalarsDocumento89 pagineScalar Quantity Magnitude: Vectors and ScalarsK-Cube MorongNessuna valutazione finora
- Trusses - Method of JointsDocumento5 pagineTrusses - Method of JointssetanglasNessuna valutazione finora
- Area Moment MethodDocumento32 pagineArea Moment MethodAlan PeterNessuna valutazione finora
- Analysis of Indeterminate Structures by Force MethodDocumento17 pagineAnalysis of Indeterminate Structures by Force Methodatish k100% (2)
- Torsion 6th ChapterDocumento13 pagineTorsion 6th ChapterakshatbhargavaNessuna valutazione finora
- 10 Flexure in Beams 02Documento21 pagine10 Flexure in Beams 02S. M. ZAHIDUR RAHMAN 1301129Nessuna valutazione finora
- Strength of Materials by S K Mondal 4 PDFDocumento34 pagineStrength of Materials by S K Mondal 4 PDFajaykrishna_99Nessuna valutazione finora
- Chapter 6 Analysis of Structures: Connected at Their Extremities Only. The Members BeingDocumento13 pagineChapter 6 Analysis of Structures: Connected at Their Extremities Only. The Members BeingBELAL ALSUBARINessuna valutazione finora
- Connected at Their Extremities Only. The Members BeingDocumento13 pagineConnected at Their Extremities Only. The Members BeingSergio Sánchez SalazarNessuna valutazione finora
- Connected at Their Extremities Only. The Members BeingDocumento13 pagineConnected at Their Extremities Only. The Members BeingMarco AntonioNessuna valutazione finora
- Structural Analysis: Engr. John Marco I. MatiraDocumento28 pagineStructural Analysis: Engr. John Marco I. MatiraAIMNessuna valutazione finora
- Engineering Mechanics (Analysis of Trusses)Documento5 pagineEngineering Mechanics (Analysis of Trusses)Ema MiguelNessuna valutazione finora
- 5 - Structural AnalysisDocumento46 pagine5 - Structural AnalysisHawsar Omer HamaNessuna valutazione finora
- TrussesDocumento28 pagineTrussesAbdul GaniNessuna valutazione finora
- Lecture 4-3Documento51 pagineLecture 4-3katethekat2.0Nessuna valutazione finora
- 5 BackupDocumento29 pagine5 BackupsadiksnmNessuna valutazione finora
- Mechanics CH-4 MarkosDocumento13 pagineMechanics CH-4 MarkosGadisaNessuna valutazione finora
- Method of Joints: Members Subjected To Forces Tension and CompressionDocumento7 pagineMethod of Joints: Members Subjected To Forces Tension and CompressionGemma BalictarNessuna valutazione finora
- Science Form 1Documento15 pagineScience Form 1Renu SekaranNessuna valutazione finora
- For Section A, Write Your Answer in The Answer Sheet Provided in Page 12Documento12 pagineFor Section A, Write Your Answer in The Answer Sheet Provided in Page 12Renu SekaranNessuna valutazione finora
- Cell As A Unit of LifeDocumento40 pagineCell As A Unit of LifeRenu SekaranNessuna valutazione finora
- Lesson Plan (Subject: SCIENCE)Documento3 pagineLesson Plan (Subject: SCIENCE)Renu SekaranNessuna valutazione finora
- Wesley Methodist School Klang MONTHLY TEST 1 (2019) Chemistry Form 4 Total: 50 MarksDocumento8 pagineWesley Methodist School Klang MONTHLY TEST 1 (2019) Chemistry Form 4 Total: 50 MarksRenu SekaranNessuna valutazione finora
- Lesson Plan Format 27-1Documento4 pagineLesson Plan Format 27-1Renu SekaranNessuna valutazione finora
- Lesson Plan Format 24-2 (Opal)Documento3 pagineLesson Plan Format 24-2 (Opal)Renu SekaranNessuna valutazione finora
- Intensive 4 Page 2Documento1 paginaIntensive 4 Page 2Renu SekaranNessuna valutazione finora
- Lesson Plan (Subject: SCIENCE)Documento2 pagineLesson Plan (Subject: SCIENCE)Renu SekaranNessuna valutazione finora
- Lesson Plan Format 27-1 (Opal)Documento4 pagineLesson Plan Format 27-1 (Opal)Renu SekaranNessuna valutazione finora
- E E:sl: Et Isl If:: I Ii:i I Il", 3:p:r I Et:sfDocumento1 paginaE E:sl: Et Isl If:: I Ii:i I Il", 3:p:r I Et:sfRenu SekaranNessuna valutazione finora
- Intensive 4 Page 4Documento1 paginaIntensive 4 Page 4Renu SekaranNessuna valutazione finora
- 1 PGDIPEDU (UAB) MyVLE Practicum SlideDocumento17 pagine1 PGDIPEDU (UAB) MyVLE Practicum SlideRenu SekaranNessuna valutazione finora
- MODE 2: For Student-Teacher With Less Than One: 1 Observation by Co-TeacherDocumento4 pagineMODE 2: For Student-Teacher With Less Than One: 1 Observation by Co-TeacherRenu SekaranNessuna valutazione finora
- Intensive 3 Page 2Documento1 paginaIntensive 3 Page 2Renu SekaranNessuna valutazione finora
- Form 2 - Page 1Documento1 paginaForm 2 - Page 1Renu SekaranNessuna valutazione finora
- Form 1 Assessment OCTOBER 2015 Form 1 Science: (Duration: 25 Minutes)Documento8 pagineForm 1 Assessment OCTOBER 2015 Form 1 Science: (Duration: 25 Minutes)Renu SekaranNessuna valutazione finora
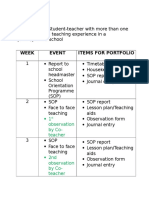
- MODE 1: For Student-Teacher With More Than One: 1 Observation by Co-TeacherDocumento4 pagineMODE 1: For Student-Teacher With More Than One: 1 Observation by Co-TeacherRenu SekaranNessuna valutazione finora
- Chapter 2b Molecular Diffusion in LiquidDocumento12 pagineChapter 2b Molecular Diffusion in LiquidRenu SekaranNessuna valutazione finora
- Analiza Procesa Ocenjivanja Na Časovima Matematike - BaucalDocumento22 pagineAnaliza Procesa Ocenjivanja Na Časovima Matematike - BaucalНевенка ЈовановићNessuna valutazione finora
- Gps Vehicle Tracker User Manual: PrefaceDocumento13 pagineGps Vehicle Tracker User Manual: PrefaceFedericoNessuna valutazione finora
- 1 - Introduction - Derivatives GreeksDocumento50 pagine1 - Introduction - Derivatives GreeksThomas GallantNessuna valutazione finora
- LCS21 - 35 - Polar PlotsDocumento14 pagineLCS21 - 35 - Polar Plotsgosek16375Nessuna valutazione finora
- Spelling RulesDocumento5 pagineSpelling RulesvijthorNessuna valutazione finora
- Physics Gcse Coursework Resistance of A WireDocumento8 paginePhysics Gcse Coursework Resistance of A Wiref5dq3ch5100% (2)
- Leonardo Romero SR High School: Republic of The Philippines Region Xii - Soccsksargen Schools Division Office of CotabatoDocumento4 pagineLeonardo Romero SR High School: Republic of The Philippines Region Xii - Soccsksargen Schools Division Office of CotabatoDulce M. LupaseNessuna valutazione finora
- 6545 Us35000Documento4 pagine6545 Us35000Rafael BarrosNessuna valutazione finora
- Soiling Rates of PV Modules vs. Thermopile PyranometersDocumento3 pagineSoiling Rates of PV Modules vs. Thermopile PyranometersAbdul Mohid SheikhNessuna valutazione finora
- Sci - Short Circuit IsolatorDocumento2 pagineSci - Short Circuit IsolatorVictor MoraesNessuna valutazione finora
- Test Bank For Chemistry An Atoms Focused Approach 3rd Edition Thomas R Gilbert Rein V Kirss Stacey Lowery Bretz Natalie FosterDocumento38 pagineTest Bank For Chemistry An Atoms Focused Approach 3rd Edition Thomas R Gilbert Rein V Kirss Stacey Lowery Bretz Natalie Fosterauntyprosperim1ru100% (10)
- Lecture - 11 Analysis and Design of Two-Way Slab Systems (Two-Way Slab With Beams & Two Way Joist Slabs) PDFDocumento64 pagineLecture - 11 Analysis and Design of Two-Way Slab Systems (Two-Way Slab With Beams & Two Way Joist Slabs) PDFNafees KhanNessuna valutazione finora
- Magnetic Field of A SolenoidDocumento5 pagineMagnetic Field of A SolenoidKang Yuan ShingNessuna valutazione finora
- Best Approach: Compound AngleDocumento8 pagineBest Approach: Compound AngleAbhiyanshu KumarNessuna valutazione finora
- 新型重油催化裂化催化剂RCC 1的研究开发Documento5 pagine新型重油催化裂化催化剂RCC 1的研究开发Anca DumitruNessuna valutazione finora
- An FPGA Implementation of A Feed-Back Chaotic Synchronization For Secure CommunicationsDocumento5 pagineAn FPGA Implementation of A Feed-Back Chaotic Synchronization For Secure Communicationslaz_chikhi1574Nessuna valutazione finora
- Triosonate in F (TWV 42-F7)Documento17 pagineTriosonate in F (TWV 42-F7)EDMILSON BRUNO DO NASCIMENTONessuna valutazione finora
- The Power of Human Connection Review 2Documento81 pagineThe Power of Human Connection Review 2Tajam SoftNessuna valutazione finora
- Gas Welding Equipment PowerpointDocumento12 pagineGas Welding Equipment PowerpointChristian RexNessuna valutazione finora
- 100 TOP Real Time Objective C Multiple Choice Questions and Answers PDF DownloadDocumento22 pagine100 TOP Real Time Objective C Multiple Choice Questions and Answers PDF DownloadNayan BariNessuna valutazione finora
- Typical Detailing of Reinforcements in Beams and SlabsDocumento2 pagineTypical Detailing of Reinforcements in Beams and SlabsNaveen BansalNessuna valutazione finora
- DIO 1000 v1.1 - EN Op ManualDocumento25 pagineDIO 1000 v1.1 - EN Op ManualMiguel Ángel Pérez FuentesNessuna valutazione finora