Potrebbero piacerti anche
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- G4 ManualDocumento64 pagineG4 Manualfroggy12345678910100% (2)
- Av36d303 SchematicDocumento30 pagineAv36d303 SchematicLuis MorenoNessuna valutazione finora
- 350W AmplifierDocumento5 pagine350W AmplifiermoisesNessuna valutazione finora
- Enemy Territory - Quake Wars - ManualDocumento22 pagineEnemy Territory - Quake Wars - ManualM_MolliNessuna valutazione finora
- Paper 15Documento3 paginePaper 15Dhondiram Maruthi KakreNessuna valutazione finora
- TransNum - Aug 04 - 095317 - Bank Statement PDFDocumento5 pagineTransNum - Aug 04 - 095317 - Bank Statement PDFDhondiram Maruthi KakreNessuna valutazione finora
- ApplicationDocumento1 paginaApplicationDhondiram Maruthi KakreNessuna valutazione finora
- Class: SE: VPCOE, Baramati First Term Attendance Report 2015-2016 Department of Electrical EngineeringDocumento16 pagineClass: SE: VPCOE, Baramati First Term Attendance Report 2015-2016 Department of Electrical EngineeringDhondiram Maruthi KakreNessuna valutazione finora
- India'S Three Stage Nuclear ProgrammeDocumento5 pagineIndia'S Three Stage Nuclear ProgrammeDhondiram Maruthi KakreNessuna valutazione finora
- Sandip Randive Open PDFDocumento1 paginaSandip Randive Open PDFDhondiram Maruthi KakreNessuna valutazione finora
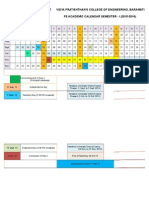
- Vidya Pratishthan'S College of Engineering, Baramati Fe Academic Calendar Semester - I (2015-2016)Documento4 pagineVidya Pratishthan'S College of Engineering, Baramati Fe Academic Calendar Semester - I (2015-2016)Dhondiram Maruthi KakreNessuna valutazione finora
- Roll Call ListDocumento21 pagineRoll Call ListDhondiram Maruthi KakreNessuna valutazione finora
- Vidya Pratishthan'S College of Engineering, Baramati: Course PlanDocumento2 pagineVidya Pratishthan'S College of Engineering, Baramati: Course PlanDhondiram Maruthi KakreNessuna valutazione finora
- 2070 201506 PDFDocumento1 pagina2070 201506 PDFDhondiram Maruthi KakreNessuna valutazione finora
- 2070 201505 PDFDocumento1 pagina2070 201505 PDFDhondiram Maruthi KakreNessuna valutazione finora
- Paradox Pir 476 Dg55 Dg55c Dg65 Dg65c Dg75 Dg75c 476 476pet Atm EtlDocumento1 paginaParadox Pir 476 Dg55 Dg55c Dg65 Dg65c Dg75 Dg75c 476 476pet Atm EtlTech StarNessuna valutazione finora
- Infobasic ProgrammingDocumento10 pagineInfobasic Programmingjaved73bdNessuna valutazione finora
- Gear Mechanism Used in Wrist WatchesDocumento5 pagineGear Mechanism Used in Wrist WatchesRaja Rv0% (1)
- Epanet Vs Watergems (083011)Documento9 pagineEpanet Vs Watergems (083011)MABA02100% (1)
- LRVP PowerDocumento28 pagineLRVP Powermnbvcx213323Nessuna valutazione finora
- Specification Sheets PDFDocumento6 pagineSpecification Sheets PDFVu TongNessuna valutazione finora
- DMPCDocumento49 pagineDMPCiprassandyNessuna valutazione finora
- bt2505b Bluetooth PhilipsDocumento2 paginebt2505b Bluetooth Philipsgursharan singh GSGNessuna valutazione finora
- Fischer Technical Services Safety ManualDocumento15 pagineFischer Technical Services Safety ManualHenry FlorendoNessuna valutazione finora
- KM Adhikarya - TBK KomplitDocumento15 pagineKM Adhikarya - TBK KomplitHelloMotion AcademyNessuna valutazione finora
- Language Translation Software Market Industry Size, Share, Growth, Trends, Statistics and Forecast 2014 - 2020Documento9 pagineLanguage Translation Software Market Industry Size, Share, Growth, Trends, Statistics and Forecast 2014 - 2020api-289551327Nessuna valutazione finora
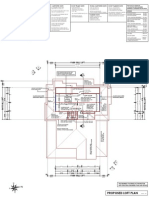
- LoftplanDocumento1 paginaLoftplanapi-228799117Nessuna valutazione finora
- Wind Loads - IS 875 - Where Does Our Code of Practice StandDocumento11 pagineWind Loads - IS 875 - Where Does Our Code of Practice StandRavi Kiran NandyalaNessuna valutazione finora
- Design and Evaluation of Inflatable Wings For UavsDocumento290 pagineDesign and Evaluation of Inflatable Wings For UavsmegustalazorraNessuna valutazione finora
- Empaque Espirometalicos PDFDocumento50 pagineEmpaque Espirometalicos PDFgregorioNessuna valutazione finora
- This Worksheet Is Due by The Deadline Posted On Blackboard. This Is An Individual SubmissionDocumento2 pagineThis Worksheet Is Due by The Deadline Posted On Blackboard. This Is An Individual SubmissionAhsan AliNessuna valutazione finora
- Physical and Mechanical Characterization of Fresh Bamboo For Infrastructure ProjectsDocumento10 paginePhysical and Mechanical Characterization of Fresh Bamboo For Infrastructure ProjectsLuanna Silva de Pires Campos AlvesNessuna valutazione finora
- Memristor Modeling in MATLAB®&SimulinkDocumento6 pagineMemristor Modeling in MATLAB®&Simulinkjoseamh69062247Nessuna valutazione finora
- Procedures For Solar Electric (Photovoltaic Abbreviated As PV) System Design and InstallationDocumento5 pagineProcedures For Solar Electric (Photovoltaic Abbreviated As PV) System Design and InstallationUmamaheshwarrao VarmaNessuna valutazione finora
- Industrial Engineering - Paradoxical Twins - Acme and Omega ElectronicsDocumento2 pagineIndustrial Engineering - Paradoxical Twins - Acme and Omega Electronicslollypop0606Nessuna valutazione finora
- Column Marking For G+4 Hostel Building: All Dimensions Are in MeterDocumento1 paginaColumn Marking For G+4 Hostel Building: All Dimensions Are in Metergowtham gowdaNessuna valutazione finora
- MEMS-Based Uncooled Infrared Bolometer Arrays - A ReviewDocumento15 pagineMEMS-Based Uncooled Infrared Bolometer Arrays - A ReviewMarco LicofonteNessuna valutazione finora
- New Premium ListDocumento10 pagineNew Premium ListAshwani SainiNessuna valutazione finora
- Info02e5 Safety ValveDocumento2 pagineInfo02e5 Safety ValveCarlos GutierrezNessuna valutazione finora
- Paper: Theory/Week: Credits: Mobile Application Development Using Android Hours: IA: ExamDocumento1 paginaPaper: Theory/Week: Credits: Mobile Application Development Using Android Hours: IA: ExamHaseeb MogralNessuna valutazione finora
- Verilog Implementation of Reed - Solomon CodeDocumento16 pagineVerilog Implementation of Reed - Solomon CodeManik Prabhu ChillalNessuna valutazione finora