Potrebbero piacerti anche
- F 14 A - 2002Documento237 pagineF 14 A - 2002Vinicius100% (1)
- Questions & Answers On Capacitance and CapacitorsDocumento113 pagineQuestions & Answers On Capacitance and Capacitorskibrom atsbha71% (14)
- PID Controller Lab Exp5Documento3 paginePID Controller Lab Exp5Sanjoy Pathak100% (2)
- EEA126 - Module 2 - SWsDocumento12 pagineEEA126 - Module 2 - SWsGabriel Carl Alpuerto100% (1)
- IRADC2020 - E020 0360 E020 0391 E020 03b1TP11 PDFDocumento8 pagineIRADC2020 - E020 0360 E020 0391 E020 03b1TP11 PDFsk8globe_01100% (1)
- Electronic Systems: Study Topics in Physics Book 8Da EverandElectronic Systems: Study Topics in Physics Book 8Valutazione: 5 su 5 stelle5/5 (1)
- UGRD-EE6301-Feedback-and-Control-Systems-Overall-Midterm QuizessDocumento13 pagineUGRD-EE6301-Feedback-and-Control-Systems-Overall-Midterm QuizessJitlee PapaNessuna valutazione finora
- Control of DC Motor Using Different Control StrategiesDa EverandControl of DC Motor Using Different Control StrategiesNessuna valutazione finora
- IEEE 43 (Testing Insulation Rotating Machine)Documento4 pagineIEEE 43 (Testing Insulation Rotating Machine)Kukuh WidodiNessuna valutazione finora
- Presentation For ControllerDocumento42 paginePresentation For ControllerAlakshendra JohariNessuna valutazione finora
- Control Systems Unit-2 Time Response Analysis: Ms. P. Geethanjali Asst. Professor (SR) SelectDocumento157 pagineControl Systems Unit-2 Time Response Analysis: Ms. P. Geethanjali Asst. Professor (SR) SelectVijay IndukuriNessuna valutazione finora
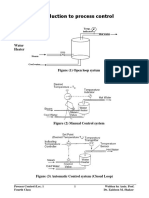
- Lect 1 Introduction To Process ControlDocumento4 pagineLect 1 Introduction To Process ControlZaidoon MohsinNessuna valutazione finora
- Assistant Professor Dr. Khalaf S Gaeid: Electrical Engineering Department/Tikrit UniversityDocumento39 pagineAssistant Professor Dr. Khalaf S Gaeid: Electrical Engineering Department/Tikrit Universityaditee saxenaaNessuna valutazione finora
- Formula of 2 Wire RTD, 3 Wire RTD & 4 Wire RTD.Documento3 pagineFormula of 2 Wire RTD, 3 Wire RTD & 4 Wire RTD.kali bangonNessuna valutazione finora
- Control SystemDocumento11 pagineControl Systembalaji1986Nessuna valutazione finora
- Control Systems K-NotesDocumento33 pagineControl Systems K-NotesvidhikhabyaNessuna valutazione finora
- LTE System Principle 20110525 A 1.0Documento50 pagineLTE System Principle 20110525 A 1.0tech_geekNessuna valutazione finora
- National Roaming Consultation Paper - Final VersionDocumento21 pagineNational Roaming Consultation Paper - Final Versionrachid190274Nessuna valutazione finora
- Module 4: Time Response of Discrete Time Systems: Lecture Note 1Documento5 pagineModule 4: Time Response of Discrete Time Systems: Lecture Note 1nirmal_inbox100% (1)
- Steady State ErrorDocumento37 pagineSteady State ErrorMathurthi BrahmiNessuna valutazione finora
- Feedback Control System CharacteristicsDocumento17 pagineFeedback Control System Characteristicsunnvishnu100% (1)
- Lecture 02 AV-356 System ModelingDocumento28 pagineLecture 02 AV-356 System ModelingUsama NazirNessuna valutazione finora
- Class1 PDFDocumento46 pagineClass1 PDFJ Andrés SalasNessuna valutazione finora
- Step Response of First Order System Expt ChE Lab 2Documento5 pagineStep Response of First Order System Expt ChE Lab 2simonatics08Nessuna valutazione finora
- Cse Google QueDocumento8 pagineCse Google QueHarshad jambhaleNessuna valutazione finora
- Control Systems K-NotesDocumento35 pagineControl Systems K-NotesAkashGaurav100% (1)
- Test Signals R (T) A T: N 0 N 1 N 2 R(S) 2a/s R(S) A/s R(S) A/sDocumento53 pagineTest Signals R (T) A T: N 0 N 1 N 2 R(S) 2a/s R(S) A/s R(S) A/sAjay Kumar RNessuna valutazione finora
- Experiment No. 1 Linear System SimulatorDocumento2 pagineExperiment No. 1 Linear System Simulatorlova56100% (1)
- Lab 5 - Controls and Feedback: BackgroundDocumento6 pagineLab 5 - Controls and Feedback: BackgroundABamisheNessuna valutazione finora
- EEE338A FeedBack CharacteristicsDocumento19 pagineEEE338A FeedBack CharacteristicsKenvyl PhamNessuna valutazione finora
- CHAPTER 1: Introduction To Discrete-Time Control Systems Digital Control SystemsDocumento6 pagineCHAPTER 1: Introduction To Discrete-Time Control Systems Digital Control SystemsIzzat AzmanNessuna valutazione finora
- CHAPTER 1: Introduction To Discrete-Time Control Systems Digital Control SystemsDocumento6 pagineCHAPTER 1: Introduction To Discrete-Time Control Systems Digital Control SystemsIzzat AzmanNessuna valutazione finora
- 1) 1 Order Systems Parameter Changes (K and A)Documento9 pagine1) 1 Order Systems Parameter Changes (K and A)Ali El-GazzarNessuna valutazione finora
- Sistemas Automáticos de ControlDocumento47 pagineSistemas Automáticos de ControlMiguel Sebastian Rincon OrtegaNessuna valutazione finora
- 58077-13950-IC1251 IV Sem Control System 2-MARKSDocumento15 pagine58077-13950-IC1251 IV Sem Control System 2-MARKSMarilyn PrascillaNessuna valutazione finora
- Steady State ErrorsDocumento41 pagineSteady State ErrorsMuhammad Noman KhanNessuna valutazione finora
- Cs-Module 1 NotesDocumento58 pagineCs-Module 1 NotesSuprithaNessuna valutazione finora
- Ch3 Feedback Control System Characteristics: Main ContentDocumento27 pagineCh3 Feedback Control System Characteristics: Main Contentnainesh goteNessuna valutazione finora
- Simplest Form of A Block DiagramDocumento7 pagineSimplest Form of A Block DiagramathenalavegaNessuna valutazione finora
- Introduction To PID Control: Lab-808: Power Electronic Systems & Chips Lab., NCTU, TaiwanDocumento32 pagineIntroduction To PID Control: Lab-808: Power Electronic Systems & Chips Lab., NCTU, TaiwandaswkNessuna valutazione finora
- Chemical Plant Control (Ch-306)Documento3 pagineChemical Plant Control (Ch-306)Salim ChohanNessuna valutazione finora
- Plant: A System To Be Controlled Controller: Provides The Excitation For The Plant Designed To Control The Overall System BehaviorDocumento39 paginePlant: A System To Be Controlled Controller: Provides The Excitation For The Plant Designed To Control The Overall System BehaviorMani Kumar ReddyNessuna valutazione finora
- Feedback and Feed ForwardDocumento27 pagineFeedback and Feed ForwardEngr. AbdullahNessuna valutazione finora
- PID Controllers: System Dynamics and ControlDocumento33 paginePID Controllers: System Dynamics and ControlRuturaj BadalNessuna valutazione finora
- ECE 331 Complete NotesDocumento129 pagineECE 331 Complete NotespolygatoneoderaNessuna valutazione finora
- Control 12Documento12 pagineControl 12Hashim AshaariNessuna valutazione finora
- Lab 6-CSDocumento8 pagineLab 6-CSAmir IqbalNessuna valutazione finora
- Control System Lab: Practical ManualDocumento6 pagineControl System Lab: Practical ManualVats AlokNessuna valutazione finora
- Experiment List: SR - No - Experiments Date of Lab Conduct Date of Report SubmissionDocumento12 pagineExperiment List: SR - No - Experiments Date of Lab Conduct Date of Report SubmissionNimra NoorNessuna valutazione finora
- Assignment 03: 1 Explain Unit Step Response of First Order Linear Time Invariant SystemsDocumento6 pagineAssignment 03: 1 Explain Unit Step Response of First Order Linear Time Invariant SystemsSyed AfzalNessuna valutazione finora
- Question Bank in Control SystemsDocumento6 pagineQuestion Bank in Control SystemsMark Franz TemplonuevoNessuna valutazione finora
- ECE - Control System 1 AprDocumento9 pagineECE - Control System 1 Aprmukesh soniNessuna valutazione finora
- PTT 1 Question PaperDocumento18 paginePTT 1 Question PaperAartiNessuna valutazione finora
- Chapter 4 ControlDocumento44 pagineChapter 4 ControlFootball HDNessuna valutazione finora
- Lec10 ControlDocumento33 pagineLec10 Controlammar120Nessuna valutazione finora
- Time Response Analysis of SystemDocumento2 pagineTime Response Analysis of SystemJames Lee IlaganNessuna valutazione finora
- WINSEM2020-21 EEE3001 ETH VL2020210500342 2021-03-04 Reference-Material-IDocumento83 pagineWINSEM2020-21 EEE3001 ETH VL2020210500342 2021-03-04 Reference-Material-ISAIKAT MUKHERJEE 19BEE0132Nessuna valutazione finora
- ch10 - ModifiedDocumento125 paginech10 - ModifiedYato SenkaiNessuna valutazione finora
- ME 5659 Scribed NotesDocumento8 pagineME 5659 Scribed NotesMayur BhiseNessuna valutazione finora
- Signals and Systems Booklet (124 Pages)Documento124 pagineSignals and Systems Booklet (124 Pages)koustubha sriNessuna valutazione finora
- Aut Control-5-Steady-State-ErrorDocumento51 pagineAut Control-5-Steady-State-ErrorAlaa FaroukNessuna valutazione finora
- Lecture 04 Feedback Control System CharacteristicsDocumento23 pagineLecture 04 Feedback Control System Characteristicscesar ruizNessuna valutazione finora
- ELEC4410 Control System Design Revision NotesDocumento10 pagineELEC4410 Control System Design Revision Notescjman404Nessuna valutazione finora
- Chapter - 4 - Feedback Control System Characteristics - W2015Documento54 pagineChapter - 4 - Feedback Control System Characteristics - W2015120200421003nNessuna valutazione finora
- Microelectronic Systems N2 Checkbook: The Checkbook SeriesDa EverandMicroelectronic Systems N2 Checkbook: The Checkbook SeriesNessuna valutazione finora
- Fundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsDa EverandFundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsNessuna valutazione finora
- Lecture 2 - 30-01-08Documento17 pagineLecture 2 - 30-01-08Ali AhmadNessuna valutazione finora
- AC MaintenanceDocumento21 pagineAC MaintenanceAli AhmadNessuna valutazione finora
- PH Alkalinity ExplainedDocumento4 paginePH Alkalinity ExplainedDean DsouzaNessuna valutazione finora
- Electrical Theory: Howard W Penrose, PH.D., CMRP InstructorDocumento79 pagineElectrical Theory: Howard W Penrose, PH.D., CMRP InstructorSandun LakminaNessuna valutazione finora
- The Purpose of Business Activity: LECTURE # 01 & 02Documento9 pagineThe Purpose of Business Activity: LECTURE # 01 & 02Ali AhmadNessuna valutazione finora
- Lectrue # 12 and 13 - 30-04-08Documento26 pagineLectrue # 12 and 13 - 30-04-08Ali AhmadNessuna valutazione finora
- The Purpose of Business Activity: LECTURE # 01 & 02Documento9 pagineThe Purpose of Business Activity: LECTURE # 01 & 02Ali AhmadNessuna valutazione finora
- Matlab Training Session Iv Simulating Dynamic Systems: Sampling The Solution EquationDocumento9 pagineMatlab Training Session Iv Simulating Dynamic Systems: Sampling The Solution EquationAli AhmadNessuna valutazione finora
- Introduction To VHDL: AIR University AU, E-9, IslamabadDocumento29 pagineIntroduction To VHDL: AIR University AU, E-9, IslamabadAli AhmadNessuna valutazione finora
- Matlab Training - SIMULINKDocumento8 pagineMatlab Training - SIMULINKAtta RehmanNessuna valutazione finora
- Matlab Training Session Vii Basic Signal Processing: Frequency Domain AnalysisDocumento8 pagineMatlab Training Session Vii Basic Signal Processing: Frequency Domain AnalysisAli AhmadNessuna valutazione finora
- Matlab Training - Basic Control TheoryDocumento10 pagineMatlab Training - Basic Control TheoryhamedNessuna valutazione finora
- Jan 2008 Course Outline FinanceDocumento5 pagineJan 2008 Course Outline FinanceAli AhmadNessuna valutazione finora
- Matlab Training - SIMULINKDocumento8 pagineMatlab Training - SIMULINKAtta RehmanNessuna valutazione finora
- Printing The Model:: SimulinkDocumento8 paginePrinting The Model:: SimulinkAli AhmadNessuna valutazione finora
- Matlab Training Session Ii Data Presentation: 2-D PlotsDocumento8 pagineMatlab Training Session Ii Data Presentation: 2-D PlotsAli AhmadNessuna valutazione finora
- Matlab Training Session Iii Numerical Methods: Solutions To Systems of Linear EquationsDocumento14 pagineMatlab Training Session Iii Numerical Methods: Solutions To Systems of Linear EquationsAli AhmadNessuna valutazione finora
- Lecture 2Documento26 pagineLecture 2Ali AhmadNessuna valutazione finora
- Matlab Training - Writing M-Files - Scripts and FunctionsDocumento6 pagineMatlab Training - Writing M-Files - Scripts and Functionsederdiego2709Nessuna valutazione finora
- 2-Level Logic ( 0', 1') .: Introduction To ASIC DesignDocumento8 pagine2-Level Logic ( 0', 1') .: Introduction To ASIC DesignAli AhmadNessuna valutazione finora
- Acknowledgement - 2Documento11 pagineAcknowledgement - 2Ali AhmadNessuna valutazione finora
- Introduction To: Artificial IntelligenceDocumento31 pagineIntroduction To: Artificial IntelligenceAli AhmadNessuna valutazione finora
- Operators: Introduction To ASIC DesignDocumento6 pagineOperators: Introduction To ASIC DesignAli AhmadNessuna valutazione finora
- Multiply and Accumulate Circuits LabDocumento5 pagineMultiply and Accumulate Circuits LabAli AhmadNessuna valutazione finora
- Introduction To ASIC Design: Lab Report InstructionsDocumento1 paginaIntroduction To ASIC Design: Lab Report InstructionsAli AhmadNessuna valutazione finora
- System On Chips Soc'S & Multiprocessor System On Chips MpsocsDocumento42 pagineSystem On Chips Soc'S & Multiprocessor System On Chips MpsocsAli AhmadNessuna valutazione finora
- Example 5.1: Multiplexer #1 Using OperatorsDocumento10 pagineExample 5.1: Multiplexer #1 Using OperatorsAli AhmadNessuna valutazione finora
- Small Neural Nets LabDocumento6 pagineSmall Neural Nets LabAli AhmadNessuna valutazione finora
- Sequential Code in VHDLDocumento42 pagineSequential Code in VHDLAli Ahmad0% (1)
- Introduction To ASIC Design: Lab Report StandardsDocumento1 paginaIntroduction To ASIC Design: Lab Report StandardsAli AhmadNessuna valutazione finora
- LG MC12B 11 110VDocumento2 pagineLG MC12B 11 110VChris AntoniouNessuna valutazione finora
- What Are The Classes of Amplifiers? Basic Concepts On Class A, B & C AmplifiersDocumento4 pagineWhat Are The Classes of Amplifiers? Basic Concepts On Class A, B & C AmplifiersLello FloNessuna valutazione finora
- 986K Wheel Loader Electrical System (Cab) 486-0964 Chassis and Engine (486-0965)Documento6 pagine986K Wheel Loader Electrical System (Cab) 486-0964 Chassis and Engine (486-0965)abduallah muhammadNessuna valutazione finora
- ICS Inter Part Computer Guess PaperDocumento4 pagineICS Inter Part Computer Guess Paperzahiid munirNessuna valutazione finora
- TDS 50 MvaDocumento30 pagineTDS 50 MvaAnonymous YvM35htGaNessuna valutazione finora
- Instrumentation (Chapter 2)Documento7 pagineInstrumentation (Chapter 2)Yab TadNessuna valutazione finora
- Manual 141006222600 Conversion Gate01Documento54 pagineManual 141006222600 Conversion Gate01Jesus Cano MoralesNessuna valutazione finora
- Proj Repo UpdatedDocumento55 pagineProj Repo UpdatedAnandKadhirNessuna valutazione finora
- Photographs of EUTDocumento32 paginePhotographs of EUTBaron MunchausenNessuna valutazione finora
- 3.8.8 - Lista de Parâmetros Unidrive SPDocumento26 pagine3.8.8 - Lista de Parâmetros Unidrive SPAnonymous ugCWo0Acz3Nessuna valutazione finora
- Onyx WorksDocumento6 pagineOnyx WorksOCTAGON0% (1)
- New Stage Light Price List 2023Documento32 pagineNew Stage Light Price List 2023Marlene CruzNessuna valutazione finora
- CG Lab Exam Viva QuestionsDocumento3 pagineCG Lab Exam Viva Questionsvasanthi2014Nessuna valutazione finora
- ZKEIVDocumento28 pagineZKEIVPaskizo100% (1)
- XA Manual-V1.2Documento72 pagineXA Manual-V1.2Mohamed Elsayed100% (1)
- Common CNC Machine FailuresDocumento19 pagineCommon CNC Machine Failuresmohamed alsalhyNessuna valutazione finora
- EXD2010 EX200: Compact Ex D Electro-Hydraulic Positioning and Monitoring SystemDocumento8 pagineEXD2010 EX200: Compact Ex D Electro-Hydraulic Positioning and Monitoring SystemKelvin Anthony OssaiNessuna valutazione finora
- Control FuellDocumento51 pagineControl FuellGuadalupe GuerreroNessuna valutazione finora
- FNK06N02C N-Channel: Enhancement Mode Power MOSFETDocumento2 pagineFNK06N02C N-Channel: Enhancement Mode Power MOSFETYASIRNessuna valutazione finora
- Circuit Safari HandbookDocumento21 pagineCircuit Safari Handbooky lNessuna valutazione finora
- Book 1Documento2.808 pagineBook 1Syariefuddin SyahnanNessuna valutazione finora
- Nama: Andi Ihzan Iznain NIM: 1926042013 Prodi: Pendidikan Vokasional MekatronikaDocumento9 pagineNama: Andi Ihzan Iznain NIM: 1926042013 Prodi: Pendidikan Vokasional MekatronikaAndi Ihzan IznainNessuna valutazione finora
- TIM 40 Instruction BookDocumento44 pagineTIM 40 Instruction BookMarkus SenojNessuna valutazione finora