Potrebbero piacerti anche
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsDa EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNessuna valutazione finora
- Simanek 2008Documento6 pagineSimanek 2008José Francisco Gallardo OjedaNessuna valutazione finora
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkDa EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNessuna valutazione finora
- Diode Clamped Multilevel Inverter Fed BLDC Motor Using SEPIC ConverterDocumento5 pagineDiode Clamped Multilevel Inverter Fed BLDC Motor Using SEPIC Convertermanoj kumarNessuna valutazione finora
- Speed Control of Brushless DC Motor: A Comparative Study: Neethu U. and Jisha V. RDocumento5 pagineSpeed Control of Brushless DC Motor: A Comparative Study: Neethu U. and Jisha V. Rkishan kharelNessuna valutazione finora
- Sliding Mode Observer For Torque Control in Sensorless BLDC MotorDocumento5 pagineSliding Mode Observer For Torque Control in Sensorless BLDC MotorIOSRjournalNessuna valutazione finora
- Sensorless BLDC ControlDocumento36 pagineSensorless BLDC ControlPaolo TripicchioNessuna valutazione finora
- 5695 45 136 Sensorless Detection Rotor SRMDocumento15 pagine5695 45 136 Sensorless Detection Rotor SRMParamesh WaranNessuna valutazione finora
- A Novel Position Sensorless Control Method For Brushless DC MotorsDocumento8 pagineA Novel Position Sensorless Control Method For Brushless DC MotorsMuhammad Yusuf IrdandyNessuna valutazione finora
- A High-Speed Sliding-Mode Observer For The Sensorless Speed Control of A PMSMDocumento9 pagineA High-Speed Sliding-Mode Observer For The Sensorless Speed Control of A PMSMMaroju Santosh KiranNessuna valutazione finora
- A New Approach To Sensorless Control Method For Brushless DC MotorsDocumento23 pagineA New Approach To Sensorless Control Method For Brushless DC Motorsdeepthi056Nessuna valutazione finora
- Algorithms: DDC Control Techniques For Three-Phase BLDC Motor Position ControlDocumento16 pagineAlgorithms: DDC Control Techniques For Three-Phase BLDC Motor Position ControlVõ Đức HuyNessuna valutazione finora
- Simulation by Composite ModelDocumento8 pagineSimulation by Composite Modelanshgarg786Nessuna valutazione finora
- ++field Weakening Operation With Maximum TorqueDocumento7 pagine++field Weakening Operation With Maximum TorqueGaspar RodriguezNessuna valutazione finora
- Lab Report: Engineering Analysis and Design (EEN 206)Documento6 pagineLab Report: Engineering Analysis and Design (EEN 206)saksham mahajanNessuna valutazione finora
- BLDC ReportDocumento8 pagineBLDC ReportJoe BinghamNessuna valutazione finora
- The Implementation of FOC For PMSM Drive Based On TMS320F28035 DSP ControllerDocumento5 pagineThe Implementation of FOC For PMSM Drive Based On TMS320F28035 DSP ControllerJashan BelagurNessuna valutazione finora
- Compensation Algorithms For SMO PMSMDocumento8 pagineCompensation Algorithms For SMO PMSMKik0510Nessuna valutazione finora
- Of Induction Motor Using Artificial Neural Network and Implementation in MATLABDocumento54 pagineOf Induction Motor Using Artificial Neural Network and Implementation in MATLABnareshreddy136100% (1)
- Simplified Sensorless Control For BLDC MDocumento12 pagineSimplified Sensorless Control For BLDC MAlg DimasNessuna valutazione finora
- A Direct Torque Controller For Permanent Magnet Synchronous Motor DrivesDocumento6 pagineA Direct Torque Controller For Permanent Magnet Synchronous Motor DrivesGo GoNessuna valutazione finora
- The International Journal of Science & TechnoledgeDocumento6 pagineThe International Journal of Science & TechnoledgehakikNessuna valutazione finora
- Simplified Sensorless Control For BLDC Motor, Using DSP TechnologyDocumento12 pagineSimplified Sensorless Control For BLDC Motor, Using DSP Technologymichael.schuhNessuna valutazione finora
- Fault Tolerant Flux MnemonicDocumento6 pagineFault Tolerant Flux MnemonicNea AnnaNessuna valutazione finora
- Project DocumentDocumento95 pagineProject DocumentsyabseeshoesNessuna valutazione finora
- Synchronous Drive PerformanceDocumento8 pagineSynchronous Drive PerformancehaimantiNessuna valutazione finora
- Model Reference Controlled Separately Excited DC Motor: Ó Springer-Verlag London Limited 2009Documento9 pagineModel Reference Controlled Separately Excited DC Motor: Ó Springer-Verlag London Limited 2009Na ChNessuna valutazione finora
- Brushless Sensor LessDocumento9 pagineBrushless Sensor LesspruebasansNessuna valutazione finora
- Electrical Power and Energy Systems: E.G. ShehataDocumento9 pagineElectrical Power and Energy Systems: E.G. Shehataanil1216kumarNessuna valutazione finora
- 16 and 2 MARKS For CIA IIDocumento4 pagine16 and 2 MARKS For CIA IIkesavantNessuna valutazione finora
- Module 4 - 2&16marksDocumento22 pagineModule 4 - 2&16markskesavantNessuna valutazione finora
- srm123 PDFDocumento6 paginesrm123 PDFPathella SudhakarNessuna valutazione finora
- Em Cep (Fa19-Eee-031)Documento13 pagineEm Cep (Fa19-Eee-031)Shami KhanNessuna valutazione finora
- Electric Motor 2Documento60 pagineElectric Motor 2setsindia3735Nessuna valutazione finora
- Adaptive Input-OutputDocumento10 pagineAdaptive Input-Outputmail2pramod86Nessuna valutazione finora
- Equivalent Circuit Model of Linear Induction Motor With Parameters Depending On Secondary Speed For Urban Transportation SystemDocumento4 pagineEquivalent Circuit Model of Linear Induction Motor With Parameters Depending On Secondary Speed For Urban Transportation SystemSonu SunnyNessuna valutazione finora
- Open Loop Control of Permanent Magnet Synchronous Motor Using SVMDocumento5 pagineOpen Loop Control of Permanent Magnet Synchronous Motor Using SVMVipin_am100% (1)
- Comparison Between Field Oriented Contro PDFDocumento6 pagineComparison Between Field Oriented Contro PDFVincRocNessuna valutazione finora
- Three-Phase BLDC Sensorless Motor Control ApplicationDocumento30 pagineThree-Phase BLDC Sensorless Motor Control Applicationthierry42Nessuna valutazione finora
- The Flux-Based Sensorless Field-Oriented Control of Permanent Magnet Synchronous Motors Without Integrational DriftDocumento22 pagineThe Flux-Based Sensorless Field-Oriented Control of Permanent Magnet Synchronous Motors Without Integrational Driftashebir berhanuNessuna valutazione finora
- Adaptive Fuzzy Logic Position ControlDocumento6 pagineAdaptive Fuzzy Logic Position ControlAman MohantyNessuna valutazione finora
- Modelling and Simulation of Closed Loop BLDC Motor ControlDocumento30 pagineModelling and Simulation of Closed Loop BLDC Motor Controlaarya5Nessuna valutazione finora
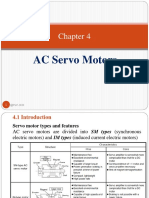
- Ac ServoDocumento38 pagineAc ServoPhạm Hữu KỳNessuna valutazione finora
- Iecon 2019 8926922Documento6 pagineIecon 2019 8926922godspower brunoNessuna valutazione finora
- NNS Notes ServomotorDocumento9 pagineNNS Notes ServomotorNarendra SinhaNessuna valutazione finora
- Vector Control of A Permanent-Magnet Synchronous Motor Using AC-AC Matrix ConverterDocumento11 pagineVector Control of A Permanent-Magnet Synchronous Motor Using AC-AC Matrix ConverterKushagra KhamesraNessuna valutazione finora
- 2008 - A Low Cost Drive Strategy For BLDC Motor With Low Torque RipplesDocumento4 pagine2008 - A Low Cost Drive Strategy For BLDC Motor With Low Torque RipplesgrcatuNessuna valutazione finora
- Basic of Servomotor ControlDocumento13 pagineBasic of Servomotor Controlmunendra_muni9896Nessuna valutazione finora
- Modeling &torque Ripple Minimization of Switched Reluctance Motor For High Speed ApplicationsDocumento6 pagineModeling &torque Ripple Minimization of Switched Reluctance Motor For High Speed ApplicationsMoon3pellNessuna valutazione finora
- PX5202 - SSDC Question BankDocumento21 paginePX5202 - SSDC Question BankRoja50% (2)
- The Equivalent Circuit and Torque of Three-Phase Induction MotorDocumento11 pagineThe Equivalent Circuit and Torque of Three-Phase Induction Motorعمر تاليونNessuna valutazione finora
- DC Motor Speed ControllerDocumento22 pagineDC Motor Speed ControllerShafqt MbrkNessuna valutazione finora
- Paper 9Documento5 paginePaper 9SanthoshNessuna valutazione finora
- My ReprtDocumento13 pagineMy ReprtErfan UdmaNessuna valutazione finora
- Fuzzy-Logic Based Speed Control of Induction Motor Considering Core Loss Into AccountDocumento7 pagineFuzzy-Logic Based Speed Control of Induction Motor Considering Core Loss Into AccountJason CarrNessuna valutazione finora
- A New Torque Control Method For Torque Ripple Minimization of BLDC Motors With Un-Ideal Back EMFDocumento9 pagineA New Torque Control Method For Torque Ripple Minimization of BLDC Motors With Un-Ideal Back EMFPradeepChandraVarmaMandapatiNessuna valutazione finora
- Tesis JuanCamiloNustes Article Format Draft2Documento19 pagineTesis JuanCamiloNustes Article Format Draft2kamdem kouam ynnickNessuna valutazione finora
- A Novel Adaptive Commutation Angle Method ForDocumento4 pagineA Novel Adaptive Commutation Angle Method ForatulhinduNessuna valutazione finora
- Ijett V53P221Documento6 pagineIjett V53P221Rifky WahyudaNessuna valutazione finora
- Ijireeice 123 PDFDocumento6 pagineIjireeice 123 PDFUpama DasNessuna valutazione finora
- PWM Fan ControllerDocumento5 paginePWM Fan ControlleranandNessuna valutazione finora
- Irf2110 AplicationDocumento30 pagineIrf2110 Aplicationanand100% (1)
- Diode Bridge Rectifier CapacitorDocumento15 pagineDiode Bridge Rectifier Capacitoranand100% (1)
- Buck - Converters For Portable ApplicationDocumento70 pagineBuck - Converters For Portable ApplicationanandNessuna valutazione finora
- Reading Assignments:: Hopfield Networks, Constraint Satisfaction, and OptimizationDocumento24 pagineReading Assignments:: Hopfield Networks, Constraint Satisfaction, and OptimizationanandNessuna valutazione finora
- SINOPEC Industrial CatalogueDocumento12 pagineSINOPEC Industrial CatalogueSumaya Akter0% (1)
- SM 1Documento11 pagineSM 1EdgardoCadagan100% (1)
- How To Fix Ender 3 S1 and S1 Pro ABL IssuesDocumento5 pagineHow To Fix Ender 3 S1 and S1 Pro ABL IssuesServicekamuiKamuiNessuna valutazione finora
- Hidraulic Hammers Yekn0343Documento12 pagineHidraulic Hammers Yekn0343Andy DellepianeNessuna valutazione finora
- Description: 2009 Dodge Journey SE 2009 Dodge Journey SEDocumento312 pagineDescription: 2009 Dodge Journey SE 2009 Dodge Journey SEChristian Martinez100% (1)
- Alignment Coupling Operation Manual Tyre-FlexDocumento37 pagineAlignment Coupling Operation Manual Tyre-Flexer_sanjaypatelNessuna valutazione finora
- Thesis Brandon Berisford PDFDocumento55 pagineThesis Brandon Berisford PDFBeyondBeliefNessuna valutazione finora
- The Griffith Relation - A Historical Review: by Dietrich Munz and Theo FettDocumento28 pagineThe Griffith Relation - A Historical Review: by Dietrich Munz and Theo FettV.v. TaguisNessuna valutazione finora
- Van de Graaff GeneratorDocumento10 pagineVan de Graaff GeneratorJihad AnadNessuna valutazione finora
- Physics Quiz BeeDocumento22 paginePhysics Quiz BeeGeorge Isaac McQuiles100% (1)
- University Course Lecture NotesDocumento332 pagineUniversity Course Lecture NotesAlFakir Fikri AlTakiriNessuna valutazione finora
- Remedial Cementing OverviewDocumento31 pagineRemedial Cementing OverviewAbdul RehazkNessuna valutazione finora
- Stress Analysis and Creep Life Prediction of Hydrogen Reformer Furnace TubeDocumento14 pagineStress Analysis and Creep Life Prediction of Hydrogen Reformer Furnace TubeVijay KadliNessuna valutazione finora
- Parafusos Com Gargantachapter 3Documento7 pagineParafusos Com Gargantachapter 3Miguel QueirosNessuna valutazione finora
- Droppper PopperDocumento5 pagineDroppper Popperapi-302421116Nessuna valutazione finora
- EEMUA Online Learning and Publications CatalogueDocumento6 pagineEEMUA Online Learning and Publications CatalogueT. LimNessuna valutazione finora
- Tornatech Controller (Jockey Pump) ManualDocumento11 pagineTornatech Controller (Jockey Pump) ManualIntezar AliNessuna valutazione finora
- Hydraulic Mining Excavator CAT 6060: 02. UndercarriageDocumento24 pagineHydraulic Mining Excavator CAT 6060: 02. UndercarriagehectorNessuna valutazione finora
- CCGT ExplainedDocumento22 pagineCCGT ExplainedAli Bari100% (1)
- Chapter 8 - Kinematics of GearsDocumento37 pagineChapter 8 - Kinematics of GearskbashokNessuna valutazione finora
- 08 Resolver ADocumento32 pagine08 Resolver AMaria Lunes0% (1)
- 2004 Evap System Repair Instructions - 4.2l - Bravada, Envoy & TrailblazerDocumento29 pagine2004 Evap System Repair Instructions - 4.2l - Bravada, Envoy & Trailblazerisshmang100% (2)
- Report - Maintainability Design ReviewDocumento94 pagineReport - Maintainability Design ReviewNtoko100% (1)
- GRDSLABDocumento1 paginaGRDSLABNéstor Javier Romero AlvarezNessuna valutazione finora
- Scalar Wars The Brave New World of Scalar ElectromagneticsDocumento76 pagineScalar Wars The Brave New World of Scalar ElectromagneticsPerfectKey21Nessuna valutazione finora
- 1390CB B 0Documento2 pagine1390CB B 0Pat AuffretNessuna valutazione finora
- Aakash Motion CPPDocumento39 pagineAakash Motion CPPMd firoz AlamNessuna valutazione finora
- Ps-1 Unit 3Documento21 paginePs-1 Unit 3Prathap VuyyuruNessuna valutazione finora
- HVAC Engineer Project Manager in Boston MA Resume Clifford BaumDocumento3 pagineHVAC Engineer Project Manager in Boston MA Resume Clifford BaumClifford BaumNessuna valutazione finora
- Confinement (Book #1 in the Love and Madness series)Da EverandConfinement (Book #1 in the Love and Madness series)Nessuna valutazione finora
- The Voice of God: Experience A Life Changing Relationship with the LordDa EverandThe Voice of God: Experience A Life Changing Relationship with the LordNessuna valutazione finora
- From Raindrops to an Ocean: An Indian-American Oncologist Discovers Faith's Power From A PatientDa EverandFrom Raindrops to an Ocean: An Indian-American Oncologist Discovers Faith's Power From A PatientValutazione: 1 su 5 stelle1/5 (1)
- Cadet Willie McBride - Operation CrocodileDa EverandCadet Willie McBride - Operation CrocodileNessuna valutazione finora
- Locked Away (Book #2 in the Love and Madness series)Da EverandLocked Away (Book #2 in the Love and Madness series)Nessuna valutazione finora