Potrebbero piacerti anche
- Solving Problems by SearchingDocumento27 pagineSolving Problems by Searchingoromafi tubeNessuna valutazione finora
- Lecture 4Documento17 pagineLecture 4SHARDUL KULKARNINessuna valutazione finora
- SearchDocumento11 pagineSearchtoysy2020Nessuna valutazione finora
- Unit-2 Problem SolvingDocumento129 pagineUnit-2 Problem Solvinglosojew161Nessuna valutazione finora
- Unit II Sub: Artificial Intelligence Prof Priya SinghDocumento25 pagineUnit II Sub: Artificial Intelligence Prof Priya SinghAbcdNessuna valutazione finora
- Module 2Documento115 pagineModule 2J Christopher ClementNessuna valutazione finora
- PAI Module 2Documento15 paginePAI Module 2rekharaju041986Nessuna valutazione finora
- Problem-Solving: Solving Problems by SearchingDocumento40 pagineProblem-Solving: Solving Problems by SearchingIhab Amer100% (1)
- Solving Problems by SearchingDocumento131 pagineSolving Problems by SearchingPrashaman PokharelNessuna valutazione finora
- Solving Problems by SearchingDocumento78 pagineSolving Problems by SearchingTariq IqbalNessuna valutazione finora
- Solving Problems by Searching: Reflex Agent Is SimpleDocumento91 pagineSolving Problems by Searching: Reflex Agent Is Simplepratima depaNessuna valutazione finora
- Ai - Chapter 3Documento10 pagineAi - Chapter 3sale msgNessuna valutazione finora
- AI Lecture 3 PDFDocumento18 pagineAI Lecture 3 PDFJabin Akter JotyNessuna valutazione finora
- NetworkingDocumento23 pagineNetworkingteshu wodesaNessuna valutazione finora
- My AI CH 3Documento27 pagineMy AI CH 3Dawit BeyeneNessuna valutazione finora
- AI Chapter 3Documento36 pagineAI Chapter 3Mulugeta HailuNessuna valutazione finora
- IntroductionDocumento51 pagineIntroductionAhmed KhaledNessuna valutazione finora
- AI UNIT 1 BEC Part 2Documento102 pagineAI UNIT 1 BEC Part 2Naga sai ChallaNessuna valutazione finora
- Problem Solving AgentsDocumento2 pagineProblem Solving Agentssahana2904Nessuna valutazione finora
- 2 Lecture2 AIDocumento9 pagine2 Lecture2 AIAmmara HaiderNessuna valutazione finora
- AI Unit-2 NotesDocumento22 pagineAI Unit-2 NotesRajeev SahaniNessuna valutazione finora
- Problem Formulation & Solving by SearchDocumento37 pagineProblem Formulation & Solving by SearchtauraiNessuna valutazione finora
- Csen - 2031 - Ai (Solving Problems by Searching)Documento94 pagineCsen - 2031 - Ai (Solving Problems by Searching)losojew161Nessuna valutazione finora
- AI - AssignmentDocumento14 pagineAI - AssignmentlmsrtNessuna valutazione finora
- Artificial Intelligence Lecture No. 6Documento30 pagineArtificial Intelligence Lecture No. 6Syed SamiNessuna valutazione finora
- Solving Problems by SearchingDocumento58 pagineSolving Problems by SearchingjustadityabistNessuna valutazione finora
- Question Bank For CAT1 - 2mksDocumento36 pagineQuestion Bank For CAT1 - 2mksfelix777sNessuna valutazione finora
- Chapter 3 Searching and PlanningDocumento104 pagineChapter 3 Searching and PlanningTemesgenNessuna valutazione finora
- Aiml 6Documento8 pagineAiml 6Suma T KNessuna valutazione finora
- Unit II-AI-KCS071Documento45 pagineUnit II-AI-KCS071Sv tuberNessuna valutazione finora
- cs4811 ch03 Search A UninformedDocumento60 paginecs4811 ch03 Search A UninformedEngr Othman AddaweNessuna valutazione finora
- Ai Notes - 15-21Documento7 pagineAi Notes - 15-21Assoc.Prof, CSE , Vel Tech, ChennaiNessuna valutazione finora
- cs5811 ch03 Search A UninformedDocumento60 paginecs5811 ch03 Search A Uninformedodd elzainyNessuna valutazione finora
- Part 3 Problem Formulation and Search Methods FinalDocumento77 paginePart 3 Problem Formulation and Search Methods FinalAdil KhanNessuna valutazione finora
- 4 - C Problem Solving AgentsDocumento17 pagine4 - C Problem Solving AgentsPratik RajNessuna valutazione finora
- Solving Problems by Searching: Dr. Azhar MahmoodDocumento38 pagineSolving Problems by Searching: Dr. Azhar MahmoodMansoor QaisraniNessuna valutazione finora
- AI Lecture 2Documento19 pagineAI Lecture 2Hanoee AbdNessuna valutazione finora
- Unit 2 SearchDocumento51 pagineUnit 2 Searchujjawalnegi14Nessuna valutazione finora
- Searching in Problem Solving AI - PPTX - 20240118 - 183824 - 0000Documento57 pagineSearching in Problem Solving AI - PPTX - 20240118 - 183824 - 0000neha praveenNessuna valutazione finora
- Lecture 2 (B) Problem Solving AgentsDocumento10 pagineLecture 2 (B) Problem Solving AgentsM. Talha NadeemNessuna valutazione finora
- Artificial Intelligence: (Report Subtitle)Documento18 pagineArtificial Intelligence: (Report Subtitle)عبدالرحمن الدعيسNessuna valutazione finora
- AI Unit 2 NotesDocumento10 pagineAI Unit 2 NotesSatya NarayanaNessuna valutazione finora
- CH 3 SearchingDocumento18 pagineCH 3 SearchingYonatan GetachewNessuna valutazione finora
- Lecture-3 Problems Solving by SearchingDocumento79 pagineLecture-3 Problems Solving by SearchingmusaNessuna valutazione finora
- CS361 AI Week2 Lecture1Documento21 pagineCS361 AI Week2 Lecture1Mohamed HanyNessuna valutazione finora
- AI2 Problem-SolvingDocumento30 pagineAI2 Problem-SolvingAfan AffaidinNessuna valutazione finora
- Artificial Intelligence: RequirementsDocumento19 pagineArtificial Intelligence: RequirementsPreetam RajNessuna valutazione finora
- Lecture 3 Problems Solving by SearchingDocumento78 pagineLecture 3 Problems Solving by SearchingMd.Ashiqur RahmanNessuna valutazione finora
- Unit-2.1 Prob Solving Methods - Search StrategiesDocumento29 pagineUnit-2.1 Prob Solving Methods - Search Strategiesmani111111Nessuna valutazione finora
- Solving Problems by SearchingDocumento82 pagineSolving Problems by SearchingJoyfulness EphaNessuna valutazione finora
- Unit II SOLVING PROBLEMS BY SEARCHINGDocumento63 pagineUnit II SOLVING PROBLEMS BY SEARCHINGPallavi BhartiNessuna valutazione finora
- (WEEK 2) - LECTURE-2 - Search-2022Documento55 pagine(WEEK 2) - LECTURE-2 - Search-2022Precious OdediranNessuna valutazione finora
- Search Algorithms in Artificial IntelligenceDocumento5 pagineSearch Algorithms in Artificial IntelligenceSIDDHANT JAIN 20SCSE1010186Nessuna valutazione finora
- AM Unit3 ProblemSolvingBySearchingDocumento90 pagineAM Unit3 ProblemSolvingBySearchingRohan MehraNessuna valutazione finora
- Unit 2Documento48 pagineUnit 2Kishan KumarNessuna valutazione finora
- Informed and Uninformed SearchDocumento74 pagineInformed and Uninformed Searchਹਰਪਿ੍ਤ ਸਿੰਘNessuna valutazione finora
- 2-1 CAI Unit II Q & ADocumento6 pagine2-1 CAI Unit II Q & Aluciferk0405Nessuna valutazione finora
- CS-1351 Artificial Intelligence - Two MarksDocumento24 pagineCS-1351 Artificial Intelligence - Two Marksrajesh199155100% (1)
- Solving Problem by SearchingDocumento53 pagineSolving Problem by SearchingIqra ImtiazNessuna valutazione finora
- Google Adsense UrduDocumento18 pagineGoogle Adsense UrduArsalan AhmedNessuna valutazione finora
- Oracle Webfolder Technetwork Tutorials OBE FormsDocumento47 pagineOracle Webfolder Technetwork Tutorials OBE FormsArsalan AhmedNessuna valutazione finora
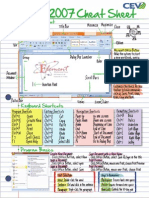
- Word 2007 Cheat SheetDocumento4 pagineWord 2007 Cheat SheetArsalan AhmedNessuna valutazione finora
- Manual Setting All PK Mobile NetworksDocumento2 pagineManual Setting All PK Mobile NetworksArsalan AhmedNessuna valutazione finora
- Course Outline (Artificial Intelligence)Documento2 pagineCourse Outline (Artificial Intelligence)Arsalan AhmedNessuna valutazione finora
- Oracle Forms MaterialDocumento88 pagineOracle Forms Materialwritesmd96% (28)
- AI Lecture 14Documento26 pagineAI Lecture 14Arsalan AhmedNessuna valutazione finora
- Lecture 7 - Adversarial Search: Dr. Muhammad Adnan HashmiDocumento25 pagineLecture 7 - Adversarial Search: Dr. Muhammad Adnan HashmiArsalan AhmedNessuna valutazione finora
- Personality VariationsDocumento17 paginePersonality VariationsArsalan AhmedNessuna valutazione finora
- AI Lecture 13Documento29 pagineAI Lecture 13Arsalan AhmedNessuna valutazione finora
- Lecture 10 - First Order Logic: Dr. Muhammad Adnan HashmiDocumento20 pagineLecture 10 - First Order Logic: Dr. Muhammad Adnan HashmiArsalan AhmedNessuna valutazione finora
- Lecture 9 - Knowledge-Based Agents and Logic: Dr. Muhammad Adnan HashmiDocumento67 pagineLecture 9 - Knowledge-Based Agents and Logic: Dr. Muhammad Adnan HashmiArsalan AhmedNessuna valutazione finora
- AI Lecture 11Documento42 pagineAI Lecture 11Arsalan AhmedNessuna valutazione finora
- AI Lecture 12Documento30 pagineAI Lecture 12Arsalan AhmedNessuna valutazione finora
- Lecture 8 - Adversarial Search: Dr. Muhammad Adnan HashmiDocumento15 pagineLecture 8 - Adversarial Search: Dr. Muhammad Adnan HashmiArsalan AhmedNessuna valutazione finora
- Lecture 5 - Informed Search: Dr. Muhammad Adnan HashmiDocumento21 pagineLecture 5 - Informed Search: Dr. Muhammad Adnan HashmiArsalan AhmedNessuna valutazione finora
- Lecture 6 - Local Search: Dr. Muhammad Adnan HashmiDocumento13 pagineLecture 6 - Local Search: Dr. Muhammad Adnan HashmiArsalan AhmedNessuna valutazione finora
- AI Lecture 1Documento20 pagineAI Lecture 1Arsalan AhmedNessuna valutazione finora
- AI Lecture 4Documento34 pagineAI Lecture 4Arsalan AhmedNessuna valutazione finora
- Methods of PsychologyDocumento24 pagineMethods of PsychologyArsalan Ahmed100% (2)
- Experimental MethodDocumento28 pagineExperimental MethodArsalan AhmedNessuna valutazione finora
- Lecture 2 - Rational Agents: Dr. Muhammad Adnan HashmiDocumento31 pagineLecture 2 - Rational Agents: Dr. Muhammad Adnan HashmiArsalan AhmedNessuna valutazione finora
- PersonalityDocumento43 paginePersonalityArsalan AhmedNessuna valutazione finora
- Using ViewsDocumento9 pagineUsing ViewsArsalan AhmedNessuna valutazione finora
- Oracle Single Row FunctionsDocumento7 pagineOracle Single Row FunctionsArsalan AhmedNessuna valutazione finora
- Introduction To Psychology RevisedDocumento38 pagineIntroduction To Psychology RevisedArsalan AhmedNessuna valutazione finora
- Naturalistic ObservationDocumento15 pagineNaturalistic ObservationArsalan AhmedNessuna valutazione finora
- SQL JoinsDocumento3 pagineSQL JoinsArsalan AhmedNessuna valutazione finora
- 8i Vs 9i Oracle JoinsDocumento3 pagine8i Vs 9i Oracle JoinsArsalan Ahmed100% (1)
- Graph Theory: Lebanese University Faculty of Science BS Computer Science 2 Year - Fall SemesterDocumento77 pagineGraph Theory: Lebanese University Faculty of Science BS Computer Science 2 Year - Fall SemesterAli MzayhemNessuna valutazione finora
- LP Graphical SolutionDocumento23 pagineLP Graphical SolutionSachin YadavNessuna valutazione finora
- Data Structure: Edusat Learning Resource MaterialDocumento91 pagineData Structure: Edusat Learning Resource MaterialPrerna AgarwalNessuna valutazione finora
- TutorialSheet 01Documento2 pagineTutorialSheet 01fuckingNessuna valutazione finora
- Unit - Chomsky HierarchyDocumento12 pagineUnit - Chomsky HierarchySHEETAL SHARMANessuna valutazione finora
- Bit MagicDocumento2.139 pagineBit MagicHarsh YadavNessuna valutazione finora
- Truth Tables 2Documento16 pagineTruth Tables 2Jaymark S. GicaleNessuna valutazione finora
- Domain Specific Language Implementation With Dependent TypesDocumento34 pagineDomain Specific Language Implementation With Dependent TypesEdwin BradyNessuna valutazione finora
- Github Copilot Ai Pair Programmer: Asset or Liability?Documento20 pagineGithub Copilot Ai Pair Programmer: Asset or Liability?yetsedawNessuna valutazione finora
- Worksheet Sig Fig 9 11 08 PDFDocumento2 pagineWorksheet Sig Fig 9 11 08 PDFzoohyun91720Nessuna valutazione finora
- 3.5 Relations and Functions: BasicsDocumento7 pagine3.5 Relations and Functions: BasicsMark J AbarracosoNessuna valutazione finora
- Programming With Pascal NotesDocumento28 pagineProgramming With Pascal NotesFred LisalitsaNessuna valutazione finora
- Machine Learning Lecture 1Documento10 pagineMachine Learning Lecture 1Sanath MurdeshwarNessuna valutazione finora
- Lecture 6: Optimality Conditions For Nonlinear ProgrammingDocumento28 pagineLecture 6: Optimality Conditions For Nonlinear ProgrammingWei GuoNessuna valutazione finora
- SSK5204 Chapter 6: Pushdown AutomataDocumento27 pagineSSK5204 Chapter 6: Pushdown AutomatascodrashNessuna valutazione finora
- Genetic Algorithm Programming in MATLAB 7.0Documento6 pagineGenetic Algorithm Programming in MATLAB 7.0Ananth VelmuruganNessuna valutazione finora
- Tutorial Sheet 8Documento3 pagineTutorial Sheet 8Barkhurdar SavdhanNessuna valutazione finora
- Peng-Analysis of CommDocumento8 paginePeng-Analysis of Commapi-3738450Nessuna valutazione finora
- Thomas Method Viviana Marcela Bayona CardenasDocumento16 pagineThomas Method Viviana Marcela Bayona CardenasvimabaNessuna valutazione finora
- Oop Lab9Documento6 pagineOop Lab9SirFeedNessuna valutazione finora
- Non-Uniform Discrete Fourier TransformDocumento4 pagineNon-Uniform Discrete Fourier TransformK.U. KimNessuna valutazione finora
- Chapter 5b Difference EquationDocumento15 pagineChapter 5b Difference Equationfarina ilyanaNessuna valutazione finora
- Data Structure - Shrivastava - IbrgDocumento268 pagineData Structure - Shrivastava - IbrgLaxmi DeviNessuna valutazione finora
- Part2 PredoptDocumento35 paginePart2 PredoptKhadija M.Nessuna valutazione finora
- AVL Trees: Muralidhara V N IIIT BangaloreDocumento26 pagineAVL Trees: Muralidhara V N IIIT Bangalorefarzi kaamNessuna valutazione finora
- SJSU EE288 Lecture18 SAR ADCDocumento15 pagineSJSU EE288 Lecture18 SAR ADCZulfiqar AliNessuna valutazione finora
- Solved Long Division Problems With Step-By-Step Walkthrough: Solutions Are On Page 2Documento2 pagineSolved Long Division Problems With Step-By-Step Walkthrough: Solutions Are On Page 2khuranaamanpreet7gmailcomNessuna valutazione finora
- Midterm CS-435 Corazza Solutions Exam B: I. T /F - (14points) Below Are 7 True/false Questions. Mark Either T or F inDocumento8 pagineMidterm CS-435 Corazza Solutions Exam B: I. T /F - (14points) Below Are 7 True/false Questions. Mark Either T or F inRomulo CostaNessuna valutazione finora
- DFT and FFT Chapter 6Documento45 pagineDFT and FFT Chapter 6Egyptian BookstoreNessuna valutazione finora
- ShgsfjhgfsjhfsDocumento3 pagineShgsfjhgfsjhfsohmyme sungjae0% (2)