Potrebbero piacerti anche
- Network Basics For Hacker v1Documento270 pagineNetwork Basics For Hacker v1Igor Samuel100% (5)
- Solutions Manual For: Arm Assembly LanguageDocumento129 pagineSolutions Manual For: Arm Assembly Languagemohammed IrheemNessuna valutazione finora
- Digital Control System Analysis & DesignDocumento5 pagineDigital Control System Analysis & DesignTrinh Le TanNessuna valutazione finora
- Lecture 14 Memory InterfaceDocumento19 pagineLecture 14 Memory Interfacenjpar0% (2)
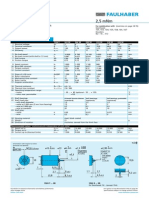
- Faulhaber DatasheetDocumento5 pagineFaulhaber DatasheetMuhammad SharifNessuna valutazione finora
- 4X4 Keypad Based Password With ATmega32 (LCD Display)Documento6 pagine4X4 Keypad Based Password With ATmega32 (LCD Display)Emin KültürelNessuna valutazione finora
- Project Report Control (DC Motor Module DCM150f) KP KDDocumento5 pagineProject Report Control (DC Motor Module DCM150f) KP KD黒い からすNessuna valutazione finora
- Introduction To Control SystemsDocumento28 pagineIntroduction To Control SystemsAK MizanNessuna valutazione finora
- Do Luong Va Dieu Khien Bang May TinhDocumento281 pagineDo Luong Va Dieu Khien Bang May TinhthanhgandNessuna valutazione finora
- ADVANCED CONTROL SYSTEMS JNTU Previous Years Question PapersDocumento2 pagineADVANCED CONTROL SYSTEMS JNTU Previous Years Question Papersswetha_g_3338338Nessuna valutazione finora
- PSIM Brochure PDFDocumento20 paginePSIM Brochure PDFIzzuddin NashirNessuna valutazione finora
- Catalogue - DC Dien - HemDocumento8 pagineCatalogue - DC Dien - HemLuong Tam ThinhNessuna valutazione finora
- Adaptive Control Theory: Pole-Placement and Indirect STRDocumento48 pagineAdaptive Control Theory: Pole-Placement and Indirect STRThanh NguyenNessuna valutazione finora
- Frequency Response For Control System Analysis - GATE Study Material in PDFDocumento8 pagineFrequency Response For Control System Analysis - GATE Study Material in PDFnidhi tripathiNessuna valutazione finora
- Common Nonlinearities and Describing FunctionsDocumento16 pagineCommon Nonlinearities and Describing FunctionsMona AliNessuna valutazione finora
- Electrical Machines IDocumento5 pagineElectrical Machines ILohanathan VkNessuna valutazione finora
- 56 - A Learning Model For 8051 Microcontroller Case Study On Closed Loop DC Motor Speed Control PDFDocumento7 pagine56 - A Learning Model For 8051 Microcontroller Case Study On Closed Loop DC Motor Speed Control PDFhecirlene vieiraNessuna valutazione finora
- Placement Questions Advanced Control SystemsDocumento33 paginePlacement Questions Advanced Control SystemsMainul BaikkaNessuna valutazione finora
- hệ thống kích từ trong nhà máy thủy điệnDocumento344 paginehệ thống kích từ trong nhà máy thủy điệnTung NguyenNessuna valutazione finora
- Lab Manual - TheoryDocumento49 pagineLab Manual - TheoryLovely VinayNessuna valutazione finora
- Control System Notes by HPK KumarDocumento56 pagineControl System Notes by HPK KumarNathan SwansonNessuna valutazione finora
- FRP C & DS DumpsDocumento627 pagineFRP C & DS DumpsKiranraj DcNessuna valutazione finora
- ECE 271 Lab 1 An Introduction To Modeling, Verilog, and Real World Digital PartsDocumento20 pagineECE 271 Lab 1 An Introduction To Modeling, Verilog, and Real World Digital PartsBin BinNessuna valutazione finora
- 6 - Signal Flow GraphsDocumento59 pagine6 - Signal Flow GraphsSuyash Dahake VlogsNessuna valutazione finora
- Exp1 dSPACEDocumento19 pagineExp1 dSPACEVisheshNessuna valutazione finora
- Home Assignments #3Documento2 pagineHome Assignments #3Pham Thanh0% (1)
- Chapter 2 - Discrete-State Control Part IDocumento37 pagineChapter 2 - Discrete-State Control Part IVon JinNessuna valutazione finora
- Ece IV Control Systems (10es43) Notes1Documento205 pagineEce IV Control Systems (10es43) Notes1Nithindev GuttikondaNessuna valutazione finora
- GATE Electrical by Kanodia PDF 1 200Documento200 pagineGATE Electrical by Kanodia PDF 1 200Ankita Sogani Kothari100% (1)
- EEE-338 Power Electronics Lab Manual FAll2021Documento66 pagineEEE-338 Power Electronics Lab Manual FAll2021Muhammad DawoodNessuna valutazione finora
- Lecture 18 Static Error Constants and System TypeDocumento21 pagineLecture 18 Static Error Constants and System TypeHamza KhanNessuna valutazione finora
- Lecture 6 Gajski Kuhn Y ChartDocumento18 pagineLecture 6 Gajski Kuhn Y ChartShiraz HusainNessuna valutazione finora
- IpbalanceDocumento1 paginaIpbalancephuceltnNessuna valutazione finora
- Digital Controlled System Lab Manual PDFDocumento43 pagineDigital Controlled System Lab Manual PDFsoumencha100% (3)
- Control System Lab ManualDocumento20 pagineControl System Lab ManualvaibhavNessuna valutazione finora
- Pipelining VerilogDocumento26 paginePipelining VerilogThineshNessuna valutazione finora
- Position Form & Velocity Form of PID ControllerDocumento6 paginePosition Form & Velocity Form of PID ControllerThefairman UnkownNessuna valutazione finora
- Number Systems and Boolean LogicDocumento9 pagineNumber Systems and Boolean Logicapi-260685687Nessuna valutazione finora
- Chapter 8 ProblemsDocumento21 pagineChapter 8 Problemskhrid3100% (2)
- CISE 316 Control Systems Design Lab ManualDocumento78 pagineCISE 316 Control Systems Design Lab Manualnirmal_inbox100% (1)
- Control Tutorials For MATLAB and Simulink - Simulink Basics TutorialDocumento20 pagineControl Tutorials For MATLAB and Simulink - Simulink Basics TutorialManoj HandeNessuna valutazione finora
- Introduction To Control: Dr. Muhammad Aamir Assistant Professor Bahria University IslamabadDocumento117 pagineIntroduction To Control: Dr. Muhammad Aamir Assistant Professor Bahria University IslamabadEnGr Asad Hayat BanGashNessuna valutazione finora
- Lica Unit-1 Notes (3-1 ECE)Documento52 pagineLica Unit-1 Notes (3-1 ECE)vasantha_btech90% (20)
- DSP - Nov 19 Q&a PDFDocumento17 pagineDSP - Nov 19 Q&a PDFAnonymous yO7rcec6vuNessuna valutazione finora
- Measurements and InstrumentationDocumento3 pagineMeasurements and Instrumentationsreenivas43100% (1)
- PLC Exam Paper Mit ManipalDocumento3 paginePLC Exam Paper Mit ManipalAshley Jovian Correa50% (2)
- OmniRoller Holonomic Drive TutorialDocumento11 pagineOmniRoller Holonomic Drive TutorialYoussef AbbasNessuna valutazione finora
- Control System Lecture PlanDocumento3 pagineControl System Lecture PlanGulzar AhamdNessuna valutazione finora
- MCQ Digital Electronics - 1Documento38 pagineMCQ Digital Electronics - 1avpatil333Nessuna valutazione finora
- First Steps Towards An Open Control Architecture For A PUMA 560Documento6 pagineFirst Steps Towards An Open Control Architecture For A PUMA 560Rajeev GargNessuna valutazione finora
- DCS Chapter1Documento71 pagineDCS Chapter1Qutayba YaseenNessuna valutazione finora
- Paper UksimDocumento6 paginePaper Uksimsattanic666Nessuna valutazione finora
- Clase Diseño Por Medio Del LGR Usando MatlabDocumento42 pagineClase Diseño Por Medio Del LGR Usando MatlabJesus Tapia GallardoNessuna valutazione finora
- Benchmarking The Performance of A Dspic Controller Programed With Automatically Generated CodeDocumento7 pagineBenchmarking The Performance of A Dspic Controller Programed With Automatically Generated CodeOmar Milián MorónNessuna valutazione finora
- Research Inventy: International Journal of Engineering and ScienceDocumento5 pagineResearch Inventy: International Journal of Engineering and ScienceresearchinventyNessuna valutazione finora
- FFFDocumento24 pagineFFFEngr Nayyer Nayyab MalikNessuna valutazione finora
- Ece305 PDFDocumento24 pagineEce305 PDFmrityunjay jhaNessuna valutazione finora
- A Master-Slave DSP Board For Digital ControlDocumento5 pagineA Master-Slave DSP Board For Digital Controlfurious143Nessuna valutazione finora
- Advanced Techniques and Technology of Computer-Aided Feedback ControlDa EverandAdvanced Techniques and Technology of Computer-Aided Feedback ControlNessuna valutazione finora
- Distributed Model Predictive Control for Plant-Wide SystemsDa EverandDistributed Model Predictive Control for Plant-Wide SystemsNessuna valutazione finora
- Control of DC Motor Using Different Control StrategiesDa EverandControl of DC Motor Using Different Control StrategiesNessuna valutazione finora
- 8th Biology Telugu OptDocumento202 pagine8th Biology Telugu Optrameshaarya99Nessuna valutazione finora
- Chapter-Iii Subhas Chandra Bose and The Indian National CongressDocumento70 pagineChapter-Iii Subhas Chandra Bose and The Indian National CongressPriyanka ChauhanNessuna valutazione finora
- Year Book 2015Documento538 pagineYear Book 2015Omkar Sangle100% (1)
- Notification Calling For Nominations For Appointment As Chairman and Members of Telangana State Electricity Regulatory CommissionDocumento2 pagineNotification Calling For Nominations For Appointment As Chairman and Members of Telangana State Electricity Regulatory Commissionrameshaarya99Nessuna valutazione finora
- Indian Geography: North Longitudes EastDocumento2 pagineIndian Geography: North Longitudes Eastrameshaarya99Nessuna valutazione finora
- Call - No Candidate Name S.No Candidate Name Call - No S.NoDocumento141 pagineCall - No Candidate Name S.No Candidate Name Call - No S.Norameshaarya99Nessuna valutazione finora
- UPSC: Engineering Services Exam 2014 General Ability Test Key (Held On 20.06.2014)Documento1 paginaUPSC: Engineering Services Exam 2014 General Ability Test Key (Held On 20.06.2014)rameshaarya99Nessuna valutazione finora
- A and The Maximum Deflection. EI Is ConstantDocumento41 pagineA and The Maximum Deflection. EI Is Constantrameshaarya99Nessuna valutazione finora
- Principles of Production Engineering: Week 1 Structure of MaterialsDocumento26 paginePrinciples of Production Engineering: Week 1 Structure of Materialsrameshaarya99Nessuna valutazione finora
- Chap 5.1 Conditions Equations of Equilibrium of A Rigid BodyDocumento52 pagineChap 5.1 Conditions Equations of Equilibrium of A Rigid Bodyrameshaarya99Nessuna valutazione finora
- 4.36 4.37Documento2 pagine4.36 4.37rameshaarya99Nessuna valutazione finora
- Past Exam AnsDocumento8 paginePast Exam Ansrameshaarya99Nessuna valutazione finora
- 499347059chemistry Question Bank (2013-14)Documento94 pagine499347059chemistry Question Bank (2013-14)rameshaarya99Nessuna valutazione finora
- Devaraj Kiruthika 201112 PHDDocumento227 pagineDevaraj Kiruthika 201112 PHDrameshaarya99Nessuna valutazione finora
- Nec sv8100 System Maintenance Manual PDFDocumento78 pagineNec sv8100 System Maintenance Manual PDFLuis AntonioNessuna valutazione finora
- Lab 5 (BGP-Slide) PDFDocumento17 pagineLab 5 (BGP-Slide) PDFhiNessuna valutazione finora
- Assembler Directives 8086Documento18 pagineAssembler Directives 8086Jasmine KNessuna valutazione finora
- Command Center RX User GuideDocumento118 pagineCommand Center RX User Guideg26720038462Nessuna valutazione finora
- Book - Security Color en PDFDocumento404 pagineBook - Security Color en PDFzeeshanNessuna valutazione finora
- 04 - Cisco Frame Relay Solutions Guide PDFDocumento412 pagine04 - Cisco Frame Relay Solutions Guide PDFMario Ramirez Mendez67% (3)
- DropboxDocumento3 pagineDropboxGermano SantanaNessuna valutazione finora
- Lab Manual: Submmitted byDocumento70 pagineLab Manual: Submmitted byMuhammad owais Muhammad munirNessuna valutazione finora
- Introduction To TCP/IP: CT4005NIDocumento27 pagineIntroduction To TCP/IP: CT4005NISandesh ShiwakotiNessuna valutazione finora
- Mqchat TranscriptDocumento7 pagineMqchat TranscriptkirankakaNessuna valutazione finora
- Tpms - DSP Productivity Review Sheet For Month EndingDocumento1 paginaTpms - DSP Productivity Review Sheet For Month EndingvamshivarkutiNessuna valutazione finora
- Scan Wizard 5 ReadMeDocumento3 pagineScan Wizard 5 ReadMeismaelvillaNessuna valutazione finora
- Game LogDocumento11 pagineGame LogنصرالحكمالغزلىNessuna valutazione finora
- C2 Laptop ZenBookProDuo15UX582ZM v0Documento10 pagineC2 Laptop ZenBookProDuo15UX582ZM v0nofiardiman saputraNessuna valutazione finora
- Reaction PaperDocumento1 paginaReaction PaperSocrates FloresNessuna valutazione finora
- 78F0034AYDocumento66 pagine78F0034AYZoran KovacevicNessuna valutazione finora
- DX Basic ToolDocumento2 pagineDX Basic ToolCristian m VizcainoNessuna valutazione finora
- X11 Basic ManualDocumento546 pagineX11 Basic ManualVasi ValiNessuna valutazione finora
- HUAWEI SWITCH BASIC CONFIGURATIONS WITH EXAMPLE (5 Examples) - Huawei Enterprise Support CommunityDocumento4 pagineHUAWEI SWITCH BASIC CONFIGURATIONS WITH EXAMPLE (5 Examples) - Huawei Enterprise Support CommunityTimothy AbuNessuna valutazione finora
- Arduino - InstallationDocumento4 pagineArduino - InstallationSaint-Clair LimaNessuna valutazione finora
- Experiment No:1 Three Node Point To Point Network Aim: Simulate A Three Node Point To Point Network With Duplex Links Between Them. Set Queue Size andDocumento19 pagineExperiment No:1 Three Node Point To Point Network Aim: Simulate A Three Node Point To Point Network With Duplex Links Between Them. Set Queue Size andgopinath RNessuna valutazione finora
- Different Nmap Scan TypesDocumento6 pagineDifferent Nmap Scan Typessalva_chuNessuna valutazione finora
- 120WILFDocumento3 pagine120WILFPavo FríoNessuna valutazione finora
- Ifm DTI410 20190125 IODD11 enDocumento13 pagineIfm DTI410 20190125 IODD11 ennhất phạmNessuna valutazione finora
- Dynamic Arp InspectionDocumento22 pagineDynamic Arp InspectionFUCKBALLZNessuna valutazione finora
- CCN Lab 5Documento10 pagineCCN Lab 5Mustafa Fazal AbbasNessuna valutazione finora
- Itws SyllabusDocumento2 pagineItws SyllabusShankara Rao.GNessuna valutazione finora
- Bizhub C284 - All Active Solutions: Legal NoticeDocumento36 pagineBizhub C284 - All Active Solutions: Legal NoticeMotocas & MotocasNessuna valutazione finora
- OpenOCD User's GuideDocumento148 pagineOpenOCD User's GuideMathew HollandNessuna valutazione finora