Documenti di Didattica
Documenti di Professioni
Documenti di Cultura
Using Landscape Indices To Predict Habitat Connectivity
Caricato da
Carolina Salgado RamirezDescrizione originale:
Titolo originale
Copyright
Formati disponibili
Condividi questo documento
Condividi o incorpora il documento
Hai trovato utile questo documento?
Questo contenuto è inappropriato?
Segnala questo documentoCopyright:
Formati disponibili
Using Landscape Indices To Predict Habitat Connectivity
Caricato da
Carolina Salgado RamirezCopyright:
Formati disponibili
Using Landscape Indices to Predict Habitat Connectivity Author(s): Nathan H. Schumaker Reviewed work(s): Source: Ecology, Vol.
77, No. 4 (Jun., 1996), pp. 1210-1225 Published by: Ecological Society of America Stable URL: http://www.jstor.org/stable/2265590 . Accessed: 10/05/2012 16:04
Your use of the JSTOR archive indicates your acceptance of the Terms & Conditions of Use, available at . http://www.jstor.org/page/info/about/policies/terms.jsp JSTOR is a not-for-profit service that helps scholars, researchers, and students discover, use, and build upon a wide range of content in a trusted digital archive. We use information technology and tools to increase productivity and facilitate new forms of scholarship. For more information about JSTOR, please contact support@jstor.org.
Ecological Society of America is collaborating with JSTOR to digitize, preserve and extend access to Ecology.
http://www.jstor.org
Ecology, 77(4), 1996, pp. 1210-1225
( 1996 by the Ecological Society of America
USING LANDSCAPE INDICES TO PREDICT HABITAT CONNECTIVITY1
NATHAN
H.
SCHUMAKER2
College of Forest Resources AR-JO, University of Washington, Seattle, Washington 98195 USA Abstract. The ecological consequences of habitat fragmentation include the direct effects of habitat loss and the indirect effects of reduced inter-patch dispersal. In particular, habitat patches that survive the process of fragmentation become increasingly isolated from one another, and this can cause species' declines in excess of predictions based strictly on reductions in habitat area. To quantify the hindrance of dispersal caused by habitat fragmentation, landscape ecologists have invented the notion of habitat connectivity. Indices of landscape pattern are frequently used to estimate habitat connectivity, but whether they actually do so remains undocumented. If indices of habitat pattern do indeed estimate habitat connectivity, then these indices should correlate well with predictions of dispersal success. To test this possibility, I looked for correlations between nine common indices of habitat pattern and the results of a simulated dispersal process conducted using GIS data on the distribution of old-growth forest through the Pacific Northwest. The nine indices of habitat pattern that I examined were only weakly correlated with the results from the dispersal modeling, but I identified a new pattern index, termed patch cohesion, for which the fit was much better. Moreover, I found patch cohesion to be insensitive to the details and artifacts of the dispersal model. The methodology described here will be useful to investigators using indices of landscape pattern to quantify habitat fragmentation. Key words: Advanced Very High Resolution Radiometer (AVHRR); dispersal; fragmentation; GIS; habitat connectivity; landscape ecology; Multispectral Scanner (MSS); old-growth forest; patch cohesion; pattern index.
INTRODUCTION
The decline of many species has been linked directly to habitat loss and fragmentation. Conservation strategies now frequently consider not only amounts of habitat that must be retained, but also the spatial configurations of habitat across landscapes of concern (e.g., Thomas et al. 1990, Pulliam et al. 1992). The growing accessibility of remotely sensed data and geographical information system (GIS) software has encouraged this trend, and has focused attention on the application of landscape ecology theory to conservation biology (Groom and Schumaker 1993, Doak and Mills 1994). Much of the effort to integrate conservation biology with landscape ecology has concentrated on the development of better methods for quantifying habitat fragmentation (e.g., Franklin and Forman 1987, O'Neill et al. 1988, Turner 1989, Ripple et al. 1991), and on the construction of realistic spatially explicit demographic models (Pulliam et al. 1992, McKelvey et al. 1993). But a paucity of life history data dictates that, for all but the best understood species, spatially explicit demographic models will be of limited utility (Doak and Mills 1994). In contrast, any number of indices of habitat fragmentation can be calculated easily and reliably using today's technology and data. Numerous indices of landscape pattern have been linked
1 Manuscript received 10 October 1994; revised 28 June 1995; accepted 13 September 1995. 2 Present address: Department of Fisheries and Wildlife, 104 Nash Hall, Oregon State University, Corvallis, Oregon 97331 USA.
to ecological function (Franklin and Forman 1987, Burel 1989, Miller et al. 1989, Turner et al. 1989a, Duever and Noss 1990, Keller 1990, Noss 1990, Shaw and Atkinson 1990, Ripple et al. 1991, Hansen and Urban 1992, Johnson et al. 1992). But the value of such indices has yet to be convincingly illustrated (Groom and Schumaker, 1993) because much of the existing work has involved the use of artificial, computer-generated landscapes to examine pattern indices that are intuitively appealing but have no documented relationship to critical ecological phenomena (e.g., O'Neill et al. 1988, Turner 1989, Turner et al. 1989b, Gardner and O'Neill 1991, Gustafson and Parker 1992, Plotnick et al. 1993). I report on a quantitative examination of nine commonly cited indices of habitat pattern and their ability to predict habitat connectivity. A useful index of habitat connectivity should correlate strongly with the success of a realistic foraging, mate-finding, or dispersal process (Fahrig and Merriam 1985, Buechner 1987, Kareiva 1987, Stamps et al. 1987, Fahrig and Paloheimo 1988a, b, Buechner 1989, Harrison 1989, Hastings and Wolin 1989, Taylor et al. 1993, Adler and Nuernberger 1994), but indices encountered in the landscape ecology literature rarely undergo such scrutiny. To rectify this gap in our knowledge, I make use here of a GIS map showing the actual patterns of old-growth forests across the Pacific Northwest, and measure the degree of correlation between pattern indices and the results of a spatially explicit dispersal model run in these landscapes. I used dispersal success rate to facilitate the comparison of pattern indices because low dispersal
1210
June 1996
PREDICTING HABITAT CONNECTIVITY
1211
success is often tied to population decline in fragmented habitats (Whitcomb et al. 1981, Fahrig and Merriam 1985, Henein and Merriam 1990, Thomas et al. 1990, Doak et al. 1992, Lamberson et al. 1992, Pulliam et al. 1992, Lamberson et al. 1994), and because the model's estimates of dispersal success provide a direct and independent measure of habitat connectivity. The dispersal model I employed is general but, to the extent data permit, could be parameterized for a specific organism.
METHODS
Overview of approach I conducted this study using computer software that I wrote in C to run on a SUN Workstation. This model was designed for use in an ongoing investigation of the consequences of habitat fragmentation for the Northern Spotted Owl (Strix occidentalis caurina), and some of the analysis described below reflects this original purpose. Several distinct steps were involved in generating the results presented here. I initially selected a large number of sample landscapes from the GIS data set mentioned in the Introduction. I then examined every habitat patch in each sample landscape and computed landscape pattern indices using data from all of the patches in the landscape. For my dispersal model, I assumed a territorial organism in search of vacant territories-this meant I transformed each sample landscape into a map of suitable sites or territories. Lastly, the dispersal modeling itself consisted of simulating a large number of individual movements in search of vacant territories. Habitat data The GIS habitat data used in this study provide an estimate of the amount and distribution of old-growth forest in the National Forests of the Pacific Northwest from the Cascade Mountains west to the Pacific Coast, and from the top of Washington state south through northern California (Fig. 1). The GIS map that I used was developed by The Wilderness Society from Landsat multispectral scanner (MSS) data, aerial photography, and field data (Morrison et al. 1991). I obtained the data in raster format at a resolution of one pixel = 57 X 57 M2. Only old-growth forests within the National Forest system were included in this data. The Wilderness Society used the PNW-444 definition of "old growth" (Old-Growth Definition Task Group 1986) in their classification, but not all of the National Forests were mapped with equal effort. This data set is quite large, containing 17536 rows and 4766 columns, and representing 1.53 X 106 ha of old-growth forest. The true amount of old-growth forest in the Pacific Northwest is disputed, and depends on the definition used (Marcot et al. 1991). Note that because ownerships other than National Forest lands were not mapped, the data provide a lower bound on the distri-
2000 x 2000
:*
CA NV
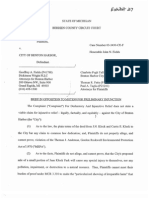
FIG. 1. The WildernessSociety GIS data for old-growth forests in the NationalForestsof the Pacific Northwest,from the CascadeMountainswest to the Pacific Coast. Old-growth forest is black in the figure,and the size of a single datapixel is 57 x 57 m. The small and large squaresshow the size of the 1000 x 1000 and 2000 x 2000 pixel sample landscapes used in the study.
bution of old-growth forests. However, the majority of the remaining old-growth forest in the Pacific Northwest is found within the National Forest system (at least 83% based on Marcot et al. 1991). Landscape selection The principal unit of analysis in this study is the landscape, and in lieu of using artificial landscapes, I chose to work with actual habitat patterns to capture
1212
NATHAN H. SCHUMAKER
Ecology, Vol. 77, No. 4
VNI'l-
'
*./X9
~~~~~~~~~~~ ~~~~~~~~~~~~~~~~~~~~~ ~~~~~~~~~.4
jf
Wi~~~~~~~~1UFM-5-7
I.t~
and 22% old-growth forest.
some of the spatial heterogeneity present in the natural world. The use of real habitat data also facilitates application of the results and makes the study more useful to ecologists investigating spatially explicit population models, which have recently become quite popular (Dunning et al. 1995, Kareiva and Wennergren 1995, Turner et al. 1995). The sheer size of The Wilderness Society's oldgrowth data set allowed me to both employ actual habitat data and retain a large number of replicate landscapes. For the purpose of this study, 1000 X 1000 and 2000 X 2000 pixel (3200 and 13 000 kM2, respectively) sample landscapes were chosen at random from the original GIS data set. Fig. 1 indicates the sizes of the sample landscapes relative to the entire data set. A simple algorithm selected row and column boundaries so that the sample landscapes fit entirely within the full data set. A total of 2100 randomly selected landscapes were used to make the comparisons between habitat pattern and dispersal success. A lower limit on the amount of old growth present in any sample landscape was specified, and if this threshold amount of habitat was not present, then the landscape was rejected and another random selection was made. I found this to be a simple and reliable mechanism for eliminating landscapes in which habitat was so sparse as to obscure
any relationships between pattern and process. My initial investigations were carried out with a minimum habitat threshold of 1%, but I later raised this value to 5%. The 1000 X 1000 and 2000 X 2000 pixel landscapes contained up to 33.4 and 17.2% old growth in up to 12000 and 30000 separate old-growth patches, respectively. Fig. 2 displays four of the 1000 X 1000 pixel landscapes I used in this study. These landscapes represent between 15 and 22% old-growth forest. Large landscapes, such as these, can be so complex as to preclude meaningful visual assessment of nontrivial attributes like degree of habitat connectivity. For example, though quantification of landscape pattern may not be necessary to conclude that the landscape Fig. 2D represents a greater degree of habitat aggregation than Fig. 2A, the difference between Fig. 2B and 2C is less obvious. Pattern indices In order to compute the values of the pattern indices examined here, it was first necessary to identify every individual habitat patch within a landscape. I defined a patch to be any collection of pixels representing old growth that touched either at sides or corners. The model assumes that pixels are square, and patch perimeters and areas were thus measured as (number of pixel edg-
June 1996
PREDICTINGHABITAT CONNECTIVITY
1213
es) X s and (number of pixels) X S2, where s is the length of a pixel edge. I treated patches that intersected a landscape boundary as if they ended at this edge. A single value for every index of habitat pattern was ascribed to each landscape. I examined nine commonly used indices of habitat pattern from the landscape ecology literature: number of patches, patch area, core area, patch perimeter, nearest neighbor distance, contagion, perimeter-area ratio, shape index, and fractal dimension. Patch area, core area, perimeter, and nearest neighbor distance were summed over all patches within a landscape. The core area of a patch consisted of all pixels that were at least a single pixel from the patch edge in all directions, including diagonals. I measured nearest neighbor distances from edge to edge. I report perimeter-area ratio, shape index, and fractal dimension as arithmetic, harmonic, and geometric means, as well as means weighted by patch area. The area-weighted mean value of an index was computed as
X
my knowledge has not been previously described. This new index is proportional to perimeter-area ratio divided by shape index when both are computed as means weighted by patch area. Forming this quotient and dropping all constant terms yields an initial quantity
of interest i, which is given by WMPA /E PA XA 1Y. X P A I XA
WMSI
[\21
PVi
where WMPA and WMSI refer to the area-weighted mean values of perimeter-area ratio and of shape index, A and P are patch areas and perimeters, and the sums are again taken over all patches within a landscape. If as before, s is used to represent the length of a pixel edge, then the right-hand terms in the previous expression can be re-written as
(pattern index X patch area) X patch area
with the sums taken over all patches within a landscape. Perimeter-area ratios were obtained by simply dividing perimeter by area; shape index (Patton 1975, Forman and Godron 1986) was computed as shape index = perimeter 2- TaX~are~a
and I estimated fractal dimension (see Da in Milne 1991) as fractal dimension = log [areaS2]
log[perimeter/4s]
This method of approximating fractal dimension has little relationship to the true value, which is computed by regressing the logarithms of patch perimeters on the logarithms of patch areas (Milne 1988, Milne 1991). Nevertheless, the quantity in the above expression is frequently encountered in the landscape ecology literature, and is discussed here for that reason. I computed contagion as in O'Neill et al. (1988), but with the modification of Li and Reynolds (1993): contagion = 2 ln(n) +
1JP,J
where a = A/s2 and p = Pls are the area and perimeter of a patch in pixels and pixel edges, respectively (a and p are the dimensionless analogues of A and P). For raster data and a fixed value of s, t attains its minimum value when every pixel is included in a single patch that fills the landscape, and it attains its maximum whenever all patches of habitat are confined to single isolated pixels. Using N to denote the total number of pixels in a landscape (including both habitat and nonhabitat), this minimum value can be expressed as and min(t) = 1I(sVN/N), the maximum is equal to max(t) = I/s. I used these limiting values to remove t's dependence on s in a manner that also inverted its slope and limited its range to values between zero and one. The resultant dimensionless quantity, hereafter referred to as patch cohesion (or "PC"), is given by
max(t)
-
max(i) - min(t)
=[
[1
Va)
Though the expression for PC may seem more cumbersome than that for t, it has the advantages of being invariant under a change of measurement units, and of having both a uniform range and a more rational slope, as will become apparent later. Territory allocation As discussed in Methods: Overview of approach, the model described here is part of a more general life history simulator for the Northern Spotted Owl. To this end, I always divided each sample landscape into a regular array of hexagonal "sites" both to mimic the territorial behavior of the owl, and because doing so simplified the movement algorithm. The discussion that follows frequently reflects this focus on territorial life histories, but it is unlikely that the results presented here would change if the model was generalized to nonterritorial species. I used hexagons to represent ter-
ln(P1i),
where n is the number of categories in the GIS data, and P1J is the total number of times that category i is adjacent to category j, divided by the total number of times category i is adjacent to all other categories, including itself. For my data, n was equal to two. To remain consistent with the definition of a patch employed in this study, my computations of contagion treated pixels touching at corners as being adjacent. In addition, experimentation with measures of patch geometry beyond the nine landscape indices described above led me to develop one additional index that to
1214
NATHAN H. SCHUMAKER
Ecology, Vol. 77, No. 4
The dispersal model I designed the dispersal model to minimize the number of parameters needing specification, and to maximize its generality. Dispersers were required to both originate from and settle into territories, and I assumed that every disperser's "parents" occupied its natal site for the duration of each model run. Thus settlement could never occur in a territory from which a disperser started. No more than one individual could be initialized into any given territory, and an unoccupied territory was always settled by the first individual to locate it, at which time it became unavailable to all other dispersers. Dispersers settling into an available territory remained on the site for the duration of the model run. In all of the dispersal runs, if not stated otherwise, 50% of the territories were chosen at random to be initialized with dispersers, and every territory not initialized with a disperser was then available to be settled. Dispersal paths consisted of a series of individual steps from a given hexagon to one of its six neighbors. In a manner similar to that employed by Stamps et al. (1987), I controlled the overall distance a disperser traveled by imposing a fixed probability of stopping at every step, for each individual, which resulted in path lengths obeying a geometric distribution. The model was parameterized with a value for the mean dispersal path length, which was then automatically converted to the corresponding stopping probability. Unless otherwise mentioned, the mean dispersal path length used in the model simulations was 25 steps. I refer to individuals in motion, or those that have successfully colonized a site, as being alive. Dispersers that stopped moving before locating a territory are described as having died. This terminology is used for convenience only, as there is no demographic component to the simulation model used here. Each living disperser still in search of a territory moved once per time step, and the order in which these individuals moved was randomized at the start of each new time step. Dispersers continued searching until they either died or located an unoccupied territory, and the mean path length, coupled with the number and spatial distribution of territories, governed the disperser's probability of dying. Dispersing individuals could move into an occupied territory, but could not settle in an occupied territory. The dispersal success rates that I report here were computed as the fraction of individuals that located territories, and they always represent an average taken over a series of separate trials. A reflecting boundary condition was imposed at the edges of the landscapes. I further specified the model's behavior by controlling the degree of randomness in the disperser's movements. Prior to settling or dying, my dispersers were never allowed to remain stationary, and thus every actively searching individual was obliged to move from its current location into one of the six adjacent hexa-
FIG. 3. The 1000 X 1000 pixel landscape of Fig. 2C following territory allocation. The hexagons are 360 pixels each, and habitat is only displayed for sites qualifying as territories (50% or more old growth). Eight steps from a hypothetical dispersal path are displayed in the lower left of the figure. Examined from left to right in the direction of the arrow, the path shown first changes direction by moving ahead to the left. It next moves directly ahead, turns ahead to the right, then turns behind to the left, behind to the right, and finally moves directly ahead.
ritories because they form space-filling arrays and because their six immediate neighbors are equidistant. Territory allocation was accomplished by first intersecting the sample landscapes with an array of hexagons having a predetermined size. Individual hexagons
in the array were designated suitable or unsuitable depending on the amount of old-growth forest that fell within their boundaries. Two parameters require specification in order to run the territory allocation process. First, it is necessary to choose a size for the hexagons. Because the model works with raster GIS data, it must identify the closest approximation to a true hexagon that remains space-filling. I used four different hexagon sizes in this study containing 36, 360, 672, and 1020 pixels, which for this data correspond to 12, 120, 218, and 331 ha, respectively. The second parameter controlling the allocation of territories specifies the minimum fraction of a qualifying hexagon's area that must be occupied by old growth. I refer to hexagons that meet this suitability criteria as territories. Unless otherwise mentioned, I set the suitability threshold at 0.5, which implied that hexagons had to contain at least 50% old growth to be designated territories. Fig. 3 shows the results of running the territory allocation process on the landscape of Fig. 2C, for 360 pixel hexagons. Habitat in the figure has only been displayed within sites that qualified as territories.
June 1996
PREDICTING HABITAT CONNECTIVITY 1.0
v
1215
gons each time step. A disperser's choice of movements was not affected by habitat quality or the presence of other individuals. With reference to the previous move, a given disperser could next travel directly ahead (DA), directly behind (DB), ahead and to the left or right (ALR), or behind and to the left or right (BLR). Fig. 3 illustrates how a simple movement path can be described using these terms. I associated probabilities with each movement direction, and made these probabilities functions of a single user-defined linearity parameter. When the choice of direction was ALR or BLR, a second decision had to be made to determine if the movement would be to the left or right. In these situations, the probabilities of selecting left vs. right were always equal. The actual probabilities that I assigned to each choice of movement direction were Pr(ALR) Pr(BLR)
Pr(DB) Pr(DA)
36-pixel Hexagons
0.80.6-
u .2 0.40 0.2u U
0
100
10
360-pixel Hexagons
&0.8 .8
0.60.4-
(1 - z)(l + Z)3 3
0.2F . 0)
0
(1
=
- Z)3(1 + z)2
o.0 rate for
CZ
bt
( 1
-
6( 1 + z) Pr(ALR)
-
~~U
C5
.0
r.
Pr(BLR)
Pr(DB)
FI 4. .
Abolt
vaue
of prdc-mmn
correlatio0
where z E [0, 1] is the user-defined linearity parameter. eas e arawihe0 ehd for a deaie These equations generate smoothly varying curves that exlnto always sum to one for any specified value of z. I selected these particular functions because together they allow a single parameter to control the degree of ranheagn prsn in adcp.Th 00X10 a domness in the disperser's movements in a seemingly linear manner. When z is set to zero, each of the six possible movement directions has an equal probability of being chosen. As z increases, the direction selected ofIG4.e Abslut heaofn vaxlue rdctmmntcrelto becomes more biased toward forward movement. When z reaches one, movement is always directly coeffcientIrelting 1patern it indices ipra t ucs ahead. Except where stated otherwise, I set the linearity raeIo bonuthd 36- andi30-ixelhnexaigatons. wthe value fran parameter to 0.5, which corresponds to values of of diesion,te shape idX, cre peimeer-laresaprati an wee fractlyisprsa suces and0rea shpe nde aeac Pr(ALR), Pr(BLR), Pr(DB), and Pr(DA) of 0.563, permeerara ato he weghedbypachara,an areta-weinghate means. See Mehodsifor. detaiedmo eplaatiorn 0.094, 0.004, and 0.339, respectively. An inverse relationship exists between the variance offrec landscape bondris, pandtoh in my model's predictions of dispersal success and the idisperswersereflected number of territories present in a landscape. To control chexagons prsenMthd)a hn i ransape the 1000rsamo1000 for this variance without needlessly slowing all of the pixhnelc landscapes contined abotal of 2797nfdh360 ie simulations, I altered the number of dispersal trials pielaghexagons siandi2828 of the 30pixtelnhniexagos conducted for a given landscape based on the number (sfered 3). Texa2000tiX 200 pixel fig. landscapmoesnel of territories it possessed. For landscapes with 100 or 6048latofthef62fixint elaigec landscapesancol fitn398 fewer territories, 1000 dispersal trials were averaged to evaluate dispersal success rate. In landscapes with todispe InitialctestFis. all indiceestpeior wit 101-250 territories, the model was run 500 times, and in all other landscapes the model was run 100 times. Dispersal runs that involved the 36 or 360 pixel hexin dicspwereascmueds fee orea landa,scapeplusxpatch agons were conducted within the 1000 X 1000 pixel sample landscapes. The 2000 X 2000 pixel landscapes were used for the dispersal trials involving 672 and 1020 pixel hexagons. The larger landscapes were used toedisptersalruess(Ftigso ahnd 5).ghthed besptc predictors with the larger hexagons to lower the rate at which
1216 1.0 o
NATHAN H. SCHUMAKER 36-pixel Hexagons
Ecology, Vol. 77, No. 4
Weighted tal dimension and contagion, which are among the most
Mean
frequently cited indices of landscape quality, attest to this point: our intuition about these measures has come almost entirely from studies of computer-generated U 0.6 Arithmetic Harmonic Geometric Ma Man Men landscapes, where their behavior is much more pre0.4dictable. Some intuitive arguments can be developed to explain the differences in the behavior of the pattern HHH n 5 0.2 -M indices discussed here. I present one such account beMea Meanea low that examines perimeter-area ratio, shape index, Mea 0.0 S 0 and patch cohesion, and then move on to a more thor1.0 ough examination of the relationship between patch 360pielHexagons cohesion and dispersal success rate. rimeter-area ratio to dipersal succss rateforboth36-aWeighted & 0.8 Mean A limitation of both perimeter-area and shape index can be illustrated with the following simple example. 0.6Consider two square patches of habitat, one with an Harmonic arithmetic Geometric 36 0.4 edge of 8 and thus an area of 64 cells, and the other n Mean a Mean Mean with an edge of 32 and an area of 1024 cells. Now m .~0.2 suppose three cells of habitat are removed from the interior (as opposed to an edge) of the smaller patch, a WK WK 0.0 T' and that none of these removed cells touched except possibly at corners (removing the habitat cells this way simply makes the patch's new perimeter easier to compute). Next, remove 130 cells from the larger patch in the same fashion. Once this is done, the two new patches will yield nearly identical values for perimeter-area ratio (0.725 vs. 0.721, neglecting units). This argument can be generalized slightly by considering an arbitrary square habitat patch of ? cells on each side, with s E
0.8-
r_
r_
{2, 4, 6, . .. }. Up to
(8
2)2/2 cells of habitat can be
removed from such patches without violating the asal (nu bsrolut vatches,o peroduter,onearet coreaighor, reutte a FIG.ea as sucs,an prdcdpout sumptions that the missing cells did not touch except and peal coeffcientseationg weraca dimnsion,bl shapeidex at corners, and that none were taken from an edge. Now, rtfor lhuhcr rimterhaea bouevle cefcetlittles 05 FI.5 thati tontributersa correlation bohigtho6diprand fpoutmoment let q represent the fraction of the (8 - 2)2 interior prorducd man valulttesaredslaye are-eihe sucs,and product- habitat cells that will be removed, with 0 c ? c 1/2. A family of curves can be generated by simultaneously varying 8 and q and, for each combination, computing that Althoredhabitat Theffterniciens moment corresaion. the value of perimeter-area ratio, or any other patchbased pattern index. I generated such a set of curves for both perimeter-area ratio and shape index, and have area performed fairly well in this experiment, it is a displayed the results in Fig. 6. The values I used for 8 ranged from 2 to 32, which corresponded to pre-reproblematic index because it requires specification of moval patch areas of between 4 and 1024 cells. For an edge width, and no single value is meaningful in all each pattern index, five values for q, including zero, circumstances (Chen 1991, Chen et al. 1992). were examined. For either perimeter-area ratio or The best predictors of dispersal success combined shape index, Fig. 6 can be interpreted as showing when information about both patch areas and perimeters. the pattern index will produce an identical value for However, of the indices that considered both, only two habitat patches of different sizes. For example, Fig. patch cohesion and the area-weighted mean values of 6 shows that shape index cannot distinguish between shape index and perimeter-area ratio were better cora patch of 1024 cells if q = 1/10 (90 cells will be related with dispersal success than patch area by itself. Thus, while these results suggest that knowing every removed) and a patch of 289 cells if ' = 1/5 (45 cells patch's area and perimeter is sufficient to accurately will be removed). In both cases, the value of the index predict the dispersal success rate for a landscape, it turns out to be roughly 4.5. The results will hold for patches of any shape as long remains to be demonstrated why some combinations of these quantities perform so well while others fail dra- as the conditions on habitat removal are not violated, matically. All of these measures are quite simple math- though the maximum number of cells that could be ematically, but realistic habitat patterns are easily com- removed will be less for patches of an arbitrary shape plex enough to make intuition a poor guide to their than for squares. But even if the conditions on habitat behavior. The consistently weak performances of frac- removal are not satisfied, the indices' behavior is likely
June 1996
PREDICTING HABITAT CONNECTIVITY
1217
Perimeter Area Ratio
erty that makes it the superior predictor of dispersal success in realistic landscapes.
ShapelIndex
A detailed look at patch cohesion
-
I performed additional tests on patch cohesion using hexagons with areas of 36, 360, 672, and 1020 pixels. For each hexagon size I randomly selected 500 landscapes having a minimum of 5% old growth. Note that a-~ ~ ~ ~~~~~~~~~/ ~ these 500 landscapes are not statistically independent because no attempt was made to avoid their overlapping one another, and this lack of independence will influence the Type I error rate of any statistical inferences based on these samples. Fig. 7 shows the scatter0 200 400 600 800 1000 plots resulting from computing patch cohesion and dispersal success rate for these four hexagon sizes. The Initial Patch Area(cells) FIG.6. Curves for perimeter-area ratio (solid lines) and ability of patch cohesion to predict dispersal success to shape index (dashed lines) corresponding the removal of rate is evidenced by the product-moment correlation cells from the interiorsof squarehabitatpatches. For each coefficients corresponding to these data, which range index, the curves were re-scaledto force theiroverall ranges between 0.91 and 0.95. The pattern of old growth in to coincide. The fractionof a habitatpath'sinteriorthat was the Pacific Northwest national forests is such that every removed (q) is indicatedwhere curves corresponding the to value of patch cohesion I computed was >0.90. same value intersect. A more powerful way to examine the data of Fig. 7 is to select each possible combination of two landto still be reminiscent of that displayed in Fig. 6. In scapes and tabulate the frequency with which patch general, while these indices can do a good job of an- cohesion fails as a predictor of dispersal success. I ticipating dispersal success, they are easily thrown off conducted such a test by discretizing observed differby small patches having relatively large perimeters. ences in the degree of patch cohesion using a bin width Such patches typically contribute little to dispersal suc- of 10-4. (Bins were simply uniform intervals along the cess, and when they cannot be distinguished from larg- real number line into which an assignment was made er patches that do strongly influence connectivity, they for each pairing of two landscapes that reflected the dramatically weaken an index's predictive power. The magnitude of their difference in cohesion.) Each pair area-weighted mean values of these indices produced of landscapes contributed to the number of failures or by far the best performances because they essentially successes associated with its corresponding bin deignored the smallest patches. It can also be seen from pending on whether the landscape with a higher patch Fig. 6 that while the trajectories generated for perim- cohesion had a higher measured dispersal success rate. eter-area ratio diverge only for small patch areas, the Taking every possible pair of 500 landscapes resulted curves corresponding to shape index diverge every- in a total of 124 750 comparisons being made for each where. This implies that, unlike perimeter-area ratio, of the four hexagon sizes (Fig. 8). It is apparent from changes in the value of shape index caused by a fixed Fig. 8 that, for the old-growth forest data, a difference shift in q will increase as patch area grows. For very in patch cohesion of -0.02 will guarantee a correct large patches, a small change in q will be unlikely to ranking of dispersal success. In fact, landscape pairs effect a change in dispersal success, and this explains separated by patch cohesion values of 0.02 or more in part why the area-weighted mean of perimeter-area were correctly ranked for dispersal success with a probratio outperformed that of shape index. Patch cohesion ability of 0.996 for 360 pixel hexagons and 0.999 for has an advantage over perimeter-area ratio and shape the other three hexagon sizes. Between 32 and 46% of index in that patch perimeters are accounted for in both the comparisons made corresponded to differences in its numerator and denominator. In fact, patch cohesion patch cohesion of 0.02 or more. I placed the landscapes can be thought of simply as a variant of the area- of Fig. 2 in increasing order (A-D) of both patch coweighted mean value of perimeter-area ratio in which hesion and dispersal success rate, and each pair is sepP\/i has replaced A in the denominator. The effect of arated by a difference in patch cohesion of at least 0.02. this substitution is to collapse the curves of Fig. 6 onto The percentage of habitat, degree of patch cohesion, the trajectory generated with q = 0. The good corre- and observed dispersal success rates corresponding to lations that were observed between dispersal success the four landscapes in Fig. 2 are: (A) 15%, 0.92, 0.58; and perimeter-area ratio, shape index, or patch cohe- (B) 22%, 0.95, 0.70; (C) 21%, 0.97, 0.72; (D) 18%, sion, derive from these indices' abilities to separate 0.99, 0.80. patches out along a gradient of circularity. Of these To conclude this analysis I used a comparison of real three indices, patch cohesion is the least sensitive to and artificially generated landscape patterns to better small changes in patch perimeters, and it is this prop- illustrate the range of behavior exhibited by patch co-
------------
1218 0.9
NATHAN H. SCHUMAKER B
Ecology, Vol. 77, No. 4
0.8
0.7 0.6 0.5 C D
MI
~.0.9
0.8
0.6
0.75
0.5 0.41 0.90
0.92
0.94
0.96
0.98
1.00
0.90
0.92
0.94
0.96
0.98
1.00
Patch Cohesion
FIG. 7. Scatterplots showing dispersal success rate as a function of patch cohesion for each of four hexagons sizes. Plots A, B, C, and D correspond to hexagons of size 36, 360, 672, and 1020 pixels, respectively. Each plot was made by examining 500 landscapes, each containing a minimum of 5% old growth. The landscapes used for plots A and B were 1000 x 1000 pixels. Plots C and D were made from 2000 X 2000 pixel landscapes. The product-moment correlation coefficients for plots A, B, C, and D are 0.95, 0.94, 0.92, and 0.91, respectively.
hesion. In a manner identical to that described above, I selected 1000 new 1000 X 1000 pixel landscapes from the full old-growth forest data set (Fig. 1). I required that these new landscapes contain at least 1% habitat, and the maximum habitat density I observed in any one landscape was 33.4%. I then constructed 1000 comparison landscapes (also 1000 X 1000 pixels) that uniformly spanned the same range of habitat densities by initializing them into an empty state and then randomly designating individual pixels as habitat until the desired density was achieved. I computed the degree of patch cohesion for each real and random landscape and displayed the results of the analysis in Fig. 9. For a given habitat density, the real landscapes always exhibited a larger degree of patch cohesion than their artificial counterparts, and the discrepancy became quite large when habitat was sparse. This analysis suggests that the relationship observed here between patch cohesion and dispersal success derives from a characteristic property of real landscapes that is not found in simple artificial landscapes, and that studies of simulated habitat pattern may thus provide little insight into the extent to which habitat fragmentation actually alters connectivity. The lack of a clear relationship between patch cohesion and habitat area for the old-growth data in Fig. 9 suggests that this index does measure an attribute
of habitat fragmentation that cannot be evaluated by simply tracking habitat loss. Sensitivity analysis I conducted several tests of the sensitivity of my results to changes in the details of the dispersal model. My first experiments were conducted using 10 of the landscapes from Fig. 7B that best matched a simple regression line fit to the data. Initially, I examined the influence of the orientation of the hexagon grid on these data. The exact placement of the hexagon grid on a landscape will affect the number and spatial relationship of territories, and thus the dispersal success rate. However, grid orientation has no effect on a landscape's value of patch cohesion. Thus if changing the orientation of the hexagon grid affected dispersal success it would cause each point in Fig. 7 to move vertically. I examined how the fit between patch cohesion and dispersal success actually changed as a function of grid placement by running the territory allocation process for 25 different grid orientations in addition to the model's default. For each of the 10 landscapes and each of 26 grid orientations, I then ran the dispersal model 1000 times and computed dispersal success rate. Fig. 1OA shows the range and mean values of dispersal success rate for these 10 landscapes resulting from
June 1996 0.5 0.40.30.20 0.1 A
PREDICTING HABITAT CONNECTIVITY
1219
0.5X 2
0.40 0.30.20.1
0.0
__ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
0.00
0.01
0.02
0.03
0.04
0.05
0.00
0.01
0.02
0.03
0.04
0.05
Difference In Patch Cohesion
FIG. 8. The frequency of ranking errors as a function of the separation in patch cohesion for all possible pairings of the data points in Fig. 7. A ranking error would occur if one member of a pair had a higher value of patch cohesion but a lower dispersal success rate than the other member. Plots A, B, C, and D correspond to hexagons of size 36, 360, 672, and 1020 pixels, respectively. In all four cases, differences in patch cohesion were discretized with a bin width of 10-4, and each plot represents 124 750 separate evaluations. Between 32% and 46% of the comparisons that were made corresponded to change in patch cohesion of 0.02 or more.
shifting the hexagon grid, as well as the corresponding regression line. The data fit the regression line well (r2 = 0.969) and the equation for the regression line in Fig. 1OA(slope = 3.527, intercept = -2.699) is almost identical to the equation for the best simple regression
line fit to the data of Fig. 7B (slope = 3.559, intercept
= -2.732).
It is clear from Fig. 8 that landscapes having values of patch cohesion differing by at least 0.02 can be confidently ranked for dispersal success rate. I used the
0.8-
Old-growthForest The degree of patch cohesion of 1000 real and 1000 artificial landscapes, plotted ' u as a function of overall habitat area. Each landscape was 1000 X 1000 pixels in size. The artificial landscapes were obtained by randomly selecting pixels of habitat until the desired den-d sity was obtained.
FIG. 9.
0
0.604
1
RandomPattern 0.2-
0.00 50 100 250 200 150 HabitatArea (10 3 pixels) 300
1220
NATHAN H. SCHUMAKER
Ecology, Vol. 77, No. 4
0.80- A
(U
0.75-
0.70 -
0.85 0.80
r0
0.75 - 80
o
100
60 50 40 30 25
0.70-13
(U
.4
0.65 0.60
1
10
O.6
OO. Patch Cohesion
Oq
FIG. 10. The resultsfrommeasuring dispersalmodel's the
sensitivityto hexagon grid orientationand meanpathlength. Both plots were madewith 10 landscapesthatfell on a simple regressionline fit to Fig. 7B. In (A) the dispersalmodel was run with the default hexagon grid orientationplus 25 additional grid orientations.The figure shows the range of dispersal success rates and the mean values for each landscape. In (B) the mean numberof steps taken duringthe dispersal process was varied. The values of mean path length used in the dispersalmodel runs are shown to the left of the curves. data obtained from shifting the orientation of the hexagon grid (Fig. 10A) to estimate how much the additional error associated with grid placement will increase the frequency of incorrect ranking of landscapes having this critical separation of patch cohesion. Suppose the "true" values of dispersal success rate are known for two landscapes, that the landscapes are separated by patch cohesion values of 0.02, and that the landscape with the higher dispersal success rate has the higher value of patch cohesion. If they were located on Fig. 7, these two landscapes would be connected by a line having a slope m. In reality, dispersal success rates can only be estimated, and these two landscapes might be incorrectly ranked if the total error in the two estimates of dispersal success rate is >0.020 X m. Using the slope of the regression line fit to Fig. 7B for m (m = 3.559), and assuming the error is shared equally between the two measurements, the maximum tolerable error in a single estimate of dispersal success rate can be assigned a value of 0.036. Model error, estimated as the average displacement from the best simple regression line that could be fit to Fig. 7B, is 0.019, which
when subtracted from 0.036 yields an estimate of the acceptable error due to grid placement of 0.017. The actual error associated with grid placement can be estimated as the mean displacement from the regression line of Fig. 10A, which is 0.005, or less than one-third of what I have estimated is acceptable. I conclude that the average error associated with grid placement should not cause landscapes to be incorrectly ranked when separated by patch cohesion values of 0.02 or more. This analysis is conservative, because in generating the data for Fig. 7, enough landscapes were selected at random that some pairs ended up only slightly offset from one another. Such situations produce measurements of dispersal success similar to what would be observed by altering the grid orientation; thus the data in Fig. 7 already incorporate some variability due to grid placement. I examined the sensitivity of my results to mean dispersal path length using the same 10 landscapes employed for the test of grid orientation. I selected a range of mean dispersal path lengths, and for each landscape and each path length, I conducted 1000 model runs and averaged the results to obtain dispersal success rate (Fig. lOB). The curves of Fig. lOB have similar slopes and all are monotonically increasing, which reflects an absence of interaction between the degree of patch cohesion and the change in dispersal success rate associated with altering the mean disperser path length. Thus the strong relationship observed between patch cohesion and dispersal success rate should be invariant to changes in dispersal path length. The value used to obtain the results of Fig. 7 (25 steps) lies in the middle of the range of path lengths examined here. I further examined the sensitivity of my results to the parameterization of the dispersal model by varying both the initial rate of occupancy and the movement linearity (z). The initial rate of occupancy specifies the fraction of a landscape's territories that will contain a disperser when the model is started up. I examined four initial occupancy rates: 10, 50 (the value used in the previous analyses), 70, and 90%. In each case, every territory not initialized with a disperser was available to be colonized. The movement linearity parameter controls the degree of correlation in direction between successive steps in a disperser's path. I examined two values of the linearity parameter: z = 0.1, and z = 0.9 (the previous results were obtained using a z value of 0.5). The influence of these parameters was measured in two experiments, one that made use of 36-pixel hexagons, and the other with 360-pixel hexagons. In each case, 100 randomly selected 1000 X 1000 pixel landscapes containing a minimum of 100 territories were taken from the old-growth data set depicted in Fig. 1. Patch cohesion and the mean dispersal success rate were computed for each landscape, for each combination of the four occupancy rates and two z values. In the tests made using 36-pixel hexagons, results from 100 replicate simulations were averaged to obtain a
June 1996 A
PREDICTING HABITAT CONNECTIVITY
1221
ranges in order to better display the trends in the results. The initial rate of occupancy exhibited a strong influence on dispersal success, however; the relationship m 10% between the two measures was predictable. Dispersal success was uniformly high when the initial occupancy rate was low because every individual was then presented with a large number of available sites it could -~50%"~ colonize. Conversely, dispersal success rate was con70% .4z,, sistently low when the initial occupancy rate was high because most search paths were then necessarily doomed to end in failure. The influence of landscape pattern on dispersal success rate was greatest when the 90% ratio of dispersers to available sites approached unity. 1.00 Movement linearity had a negligible influence on dis0.96 0.98 0.94 0.92 0.90 persal success rate except when the number of disB persers was roughly equal to the number of available territories. When evident, changes in the value of movement linearity showed up as a small vertical trans10% lation in the curves of Fig. 11. The ranges of productmoment correlation coefficients corresponding to iniUO UO tial occupancy rates of 10, 50, 70, and 90% were 0.9050% 0.92, 0.89-0.94, 0.80-0.92, and 0.06-0.77, respectively. The relationship between patch cohesion and .1 70% dispersal success breaks down in Fig. 1 B at the highest initial occupancy rate, but the differences between the largest and smallest values of dispersal success in this case are only 0.01. The otherwise high correlations associated with the data of Fig. 11 suggest that patch 0.98 1.00 cohesion will continue to function as a good predictor 0.96 0.94 Patch Cohesion of dispersal success over a large range of movement FIG. 11. Results from the sensitivity analysis in which behaviors. both the initial numberof dispersersand movementlinearity Lastly, I designed an experiment to test the perforwere varied. Each pair of trajectories was made from 100 mance of patch cohesion in habitats very different from randomly selected 1000 x 1000 pixel landscapes, but several the old-growth data of Fig. 1. For this analysis, I made such collections were used to assemble the entire figure. The percentage of a landscape's territories that were initialized use of a classified 1990 Advanced Very High Resowith dispersers is indicated to the left of each trajectory. Two lution Radiometer (AVHRR) digital image of the Pavalues of movement linearity (z = 0.1 and z = 0.9) were cific Northwest encompassing the states of Oregon, examined for every level of initial occupancy, and the larger z consistently produced a higher dispersal success rate, Washington, Idaho, and the western half of Montana. This image was classified by the U.S. Geological Surthough the difference was usually negligible. The dispersal success rates for each trajectory were rescaled to have equal vey (USGS) using a model developed by Loveland ranges in order to better display the trends in the results. The (Loveland et al. 1991), and contained 128 different actual ranges of dispersal success rates observed for the initial vegetation categories encompassing forests, shruboccupancy rates of 10, 50, 70, and 90% were 0.90-1.00, 0.64lands, grasslands, croplands, and wetlands (the com0.91, 0.37-0.44, and 0.11-0.12, respectively. In (A) the hexagon size was set to 36 pixels, and 100 replicate simulations plete USGS map that this image was clipped from dewere performed for each landscape. In (B) the hexagon size picts the entire United States and contains 159 catewas set to 360 pixels, and 1000 replicate simulations were gories). The resultant AVHRR habitat map for the Paperformed for each landscape. Only landscapes containing a minimum of 100 territories were used in the analysis, and cific Northwest was roughly 1000 pixels wide and 900 this effectively limited the range of values observed for patch pixels high, with each pixel representing 1 km2 of land cohesion. surface. Patch cohesion's performance across this wide range of habitats was assessed by measuring its value for the entire AVHRR map, for each of the 128 vegetation value for dispersal success rate. When 360-pixel hexclasses. Each time a measurement was made, a single agons were used, 1000 replicate simulations were avvegetation class was treated as habitat and all 127 otheraged to obtain a dispersal success rate. ers were grouped into a nonhabitat category. Just as in Results from the simulations in which initial occupancy rate and movement linearity were varied are pre- the earlier analysis, the simulation model was used to sented in Fig. 11. The dispersal success rates for each generate an estimate of dispersal success rate corretrajectory in the figure were rescaled to have equal sponding to each value of patch cohesion obtained from
A
1222
NATHAN H. SCHUMAKER A
Ecology, Vol. 77, No. 4
the habitat data. These dispersal simulations were conducted using 36-pixel hexagons, an initial rate of occupancy of 50%, a mean dispersal path length of 25 steps, and a movement linearity (z value) of 0.5. However, the analysis was repeated using two specifications for the amount of habitat a hexagon was required to contain in order to be considered a territory (see territory allocation in Methods). In one case, only hexagons that contained a minimum of 10% habitat were treated as territories, and in the other this minimum was raised to 50% (the specification used with the oldgrowth data). In both cases, the results from 1000 replicate simulations were averaged to obtain each value of dispersal success rate. Vegetation classes were excluded from the analysis if they produced a territory map containing <10 suitable sites. The results from this experiment with AVHRR imagery are displayed in Fig. 12, and are separated into data corresponding to territory maps containing <100 territories, and those corresponding to 100 territories or more. When every data point was considered, the product-moment correlation coefficients corresponding to the 10 and 50% habitat thresholds were both 0.88. If only data corresponding to landscapes containing 100 territories or more are used in the computation, the product-moment correlation coefficients corresponding to the 10 and 50% habitat thresholds were 0.87 and 0.95, respectively. For the most part, lower values of patch cohesion and dispersal success were associated with landscapes possessing smaller amounts of habitat. Because these data represent repeated evaluations of a single landscape taken over a large number of vegetative classes, the results can be interpreted as suggesting that patch cohesion will continue to function well as a predictor of dispersal success in habitats other than old-growth forest. These results also indicate that the utility of indices like patch cohesion might extend to more realistic situations in which many vegetation classes function simultaneously as habitats of varying qualities.
DISCUSSION
0.8
U.
..
0.6-
z
Urn 0 O. U
0
0
-z
UO 0.4 -
O~~~~~~
10 <Number Territories100 <
0.2 100 < NumberTerritories
B 0.8
X
0 < E0 10 < NumberTerritories 100 100 <Number Territories
D D
0.6 <,t, 0.4-
0.2 -
0.4
0.6 0.8 Patch Cohesion
1.0
FIG. 12. Results from the 1990 AVHRR data depicting the entire Pacific Northwest. Each data point is derived from a single vegetation class in the AVHRR data. Empty squares represent landscapes containing at least 10 but fewer than 100 territories. Filled squares represent landscapes containing at least 100 territories. Hexagons in (A) were required to contain at least 10% habitat in order to qualify as territories, while hexagons in (B) were designated as territories only when they contained a minimum of 50% habitat. For plot A, the product-moment correlation coefficients corresponding to all of the data points, and to just the filled squares, were 0.88 and 0.87, respectively. For plot B, the product-moment correlation coefficients corresponding to all of the data points, and to just the filled squares, were 0.88 and 0.95, respectively.
As a mechanism that lowers habitat connectivity, and thus territory- and mate-finding success rates, fragmentation can cause species' declines in excess of what would be predicted based strictly on estimates of habitat loss (Fahrig and Merriam 1985, Fahrig and Paloheimo 1988a, b, Pulliam 1988, Yahner 1988, Thomas et al. 1990, Foster and Gaines 1991, Saunders et al. 1991, Lamberson et al. 1992, 1994). Though habitat connectivity can be thought of as inverse to habitat fragmentation, the term has no agreed-upon definition (Taylor et al. 1993). To be as meaningful as possible, definitions of habitat connectivity should be predicated on animal movement because animal natural histories are fundamentally linked to landscape pattern through movement. These concerns inspired me to look for numerical relationships between indices of habitat pattern and es-
timates of dispersal success rate. I examined correlations between nine commonly reported indices of landscape pattern and the success of a simulated dispersal process, and found that several frequently cited indices exhibit little predictive power. These weakly correlated landscape indices include fractal dimension, perimeter-area ratio, shape index, nearest neighbor distance, and contagion. Yet I was able to construct a new pattern index, termed patch cohesion, that correlated remarkably well with estimates of dispersal success. Analogous experiments could be conducted utilizing response variables other than dispersal success rate, but to the extent that these pattern indices are intended to
measure the ecological consequences of habitat fragmentation, the test employed here seems appropriate. Very few of the old-growth landscapes that I examined exhibited patch cohesion values <0.90. This
June 1996
HABITATCONNECTIVITY PREDICTING
1223
reflects the nonrandom nature of real landscapes, that municating complex ecological insights. But if too little result from both ecological and anthropogenic pro- attention is paid to the details of real spatial pattern, cesses, as well as topographic constraints. Indeed, for then these powerful new technologies might bring more a given area in habitat, natural landscapes consistently harm than good. produced higher values of patch cohesion than their ACKNOWLEDGMENTS computer-generated analogues, and this generalization This work was supported by USDA/USFS Grant PNW 90is likely to hold for any artificial landscape fabricated 340 to R. J. Naiman, U.S. State Department Grant 1753using simple rules or probabilities. If the locations of 000574 to R. J. Naiman, M. G. Turner, and R. G. Lee, and patches within a landscape were altered, then dispersal NSF Grant BIR9256532 to G. Odell, T. Daniel, and P. Kareiva. success rate would change while patch cohesion re- I developed the initial ideas for this paper while attending a summer school on Patch Dynamics organized by S. A. Levin, mained constant. In this way, more realistic-looking T. M. Powell, and J. H. Steele and held at Cornell University artificial landscapes might also be created for which in 1991. The manuscript was prepared at the UC Santa Cruz the predictive power of patch cohesion was greatly Center for Conservation Biology where Steve Minta and Micompromised. These observations suggest that the use chael Soule generously provided me with access to the UCSC Board of Environmental Studies' GIS facility. The manuscript of computer-generated landscapes could both inflate the was greatly improved through the valuable comments of Peter value of poor predictors of ecological quality and di- Kareiva, Roland Lamberson, Dan Doak, Steve Minta, Tom minish the power of useful indices. Yet artificial land- Daniel, Garry Odell, Michelle Marvier, Dave Bigger, and an scapes have played a substantial role in the develop- anonymous reviewer. Finally, I'd like to thank Steve West ment of indices of landscape pattern (e.g., Turner et al. and Peter Kareiva for the endless encouragement without which this work would not have been possible. 1989a, b, Turner 1990, Gustafson and Parker 1992, Li LITERATURE CITED and Reynolds 1993, Plotnick et al. 1993, compare to Houston et al. 1986), and the data presented here argue Adler, F R., and B. Nuernberger. 1994. Persistence in patchy irregular landscapes. Theoretical Population Biology 45: that pattern indices should be subject to detailed ex41-75. before being accepted as proxies for true Buechner, M. 1987. Conservation in insular parks: simulaperimentation ecological value. tion models of factors affecting the movement of animals My tests of patch cohesion demonstrate that this inacross park boundaries. Biological Conservation 41:57-76. . 1989. Are small-scale landscape features important dex is robust to the details, artifacts, and parameterfactors for field studies of small mammal dispersal sinks? and this provides some ization of the dispersal model, Landscape Ecology 2: 191-199. assurance that other investigators might confidently ap- Burel, F 1989. Landscape structure effects on carabid beetles ply these results to different systems. I measured the spatial patterns in western France. Landscape Ecology 2: 215-226. frequencies with which patch cohesion failed as a predictor of dispersal success in the old-growth data, and Chen, J. 1991. Microclimatic and biological pattern at edges of Douglas-fir stands. Dissertation. University of Washingfound that landscapes separated by values of this index ton, Seattle, Washington, USA. of at least 0.02 could be ranked for dispersal success Chen, J., J. F Franklin, and T. A. Spies. 1992. Vegetation rate with almost no error. Although this analysis was responses to edge environments in old-growth Douglas-fir forests. Ecological Applications 2:387-396. designed for territorial organisms, I suspect the results here would not change significantly if the Doak, D. F, P. C. Marino, and P. M. Kareiva. 1992. Spatial presented scale mediates the influence of habitat fragmentation on model was generalized to species without territories. dispersal success: implications for conservation. TheoretThis assertion is supported by the observation that ical Population Biology 41:315-336. patch cohesion correlated strongly with dispersal suc- Doak, D. F, and L. S. Mills. 1994. A useful role for theory in conservation. Ecology 75:615-626. cess over a broad range of territory sizes and dispersal Duever, L. C., and R. F Noss. 1990. A computerized method abilities. In addition, the analysis performed using the of priority ranking for natural areas. Pages 22-33 in R. S. AVHRR habitat data demonstrates that patch coheMitchell, editor. Ecosystem management: rare species and sion's utility is not limited to the patterns and scales significant habitats. New York State Museum Bulletin 471. Dunning, J. B., Jr., D. J. Stewart, B. J. Danielson, B. R. Noon, observed in the old-growth data set. T. L. Root, R. H. Lamberson, and E. E. Stevens. 1995. Pattern indices, in addition to those described here, Spatially explicit population models: current forms and futhat are similar mathematically to patch cohesion were ture uses. Ecological Applications 5:3-11. relatively weakly correlated with dispersal success rate Fahrig, L., and G. Merriam. 1985. Habitat patch connectivity and population survival. Ecology 66:1762-1768. (N. Schumaker, personal observation), even though intuitive arguments could be made for their Fahrig, L., and J. Paloheimo. 1988a. Effect of spatial arconvincing rangement of habitat patches on local population size. Ecolutility. The poor performances of these measures, and ogy 69:468-475. most of the indices examined here, argue that the man- Fahrig, L., and J. Paloheimo. 1988b. Determinants of local ner in which a simple ecological model integrates spapopulation size in patchy habitats. Theoretical Population Biology 34:194-213. tial information can be lost on even the most intuitively appealing indices of habitat geometry. A growing in- Forman, R. T. T., and M. Godron. 1986. Landscape ecology. John Wiley & Sons, New York, New York, USA. terest in remotely sensed data and GIS technology has Foster, J., and M. S. Gaines. 1991. The effects of a succesresulted in a proliferation of indices of landscape patsional habitat mosaic on a small mammal community. Ecology 72:1358-1373. tern, and the promise of potent new tools for com-
1224
NATHAN H. SCHUMAKER
Ecology, Vol. 77, No. 4
Franklin, J. E, and R. T T Forman. 1987. Creating landscape patterns by forest cutting: ecological consequences and principles. Landscape Ecology 1:5-18. Gardner, R. H., and R. V. O'Neill. 1991. Pattern, process and predictability: the use of neutral models for landscape analysis. Pages 289-307 in M. G. Turner and R. H. Gardner, editors. Quantitative methods in landscape ecology. Springer-Verlag, New York, New York, USA. Groom, M. J., and N. Schumaker. 1993. Evaluating landscape change: patterns of worldwide deforestation and local fragmentation. Pages 24-44 in P. M. Kareiva, J. G. Kingsolver, and R. B. Huey, editors. Biotic interactions and global change. Sinauer, Sunderland, Massachusetts, USA. Gustafson, E. J., and G. R. Parker. 1992. Relationships between landcover proportion and indices of landscape spatial pattern. Landscape Ecology 7: 101-110. Hansen, A. J., and D. L. Urban. 1992. Avian response to landscape pattern: the role of species' life histories. Landscape Ecology 7:163-180. Harrison, S. 1989. Long-distance dispersal and colonization in the Bay checkerspot butterfly, Euphydryas editha bayensis. Ecology 70:1236-1243. Hastings, A., and C. L. Wolin. 1989. Within-patch dynamics in a metapopulation. Ecology 70:1261-1266. Henein, K., and G. Merriam. 1990. The elements of connectivity where corridor quality is variable. Landscape Ecology 4:157-170. Houston, B. R., T. W. Clark, and S. C. Minta. 1986. Habitat suitability index model for the blackfooted ferret: a method to locate transplant sites. Great Basin Naturalist Memoirs 8:99-114. Johnson, A. R., B. T. Milne, and J. A. Wiens. 1992. Diffusion in fractal landscapes: simulations and experimental studies of tenebrionid beetle movements. Ecology 73:1968-1983. Kareiva, P 1987. Habitat fragmentation and the stability of predator-prey interactions. Nature 326:388-390. Kareiva, P, and U. Wennergren. 1995. Connecting landscape patterns to ecosystem and population processes. Nature 373:299-302. Keller, J. K. 1990. Using aerial photography to model species-habitat relationships: the importance of habitat size and shape. Pages 34-46 in R. S. Mitchell, editor. Ecosystem management: rare species and significant habitats. New York State Museum Bulletin 471. Lamberson, R. H., R. McKelvey, B. R. Noon, and C. Voss. 1992. A dynamic analysis of northern spotted owl viability in a fragmented forest landscape. Conservation Biology 6: 505-512. Lamberson, R. H., B. R. Noon, C. Voss, and K. McKelvey. 1994. Reserve design for territorial species: the effects of patch size and spacing on the viability of the northern spotted owl. Conservation Biology 8:185-195. Li, H., and J. E Reynolds. 1993. A new contagion index to quantify spatial patterns of landscapes. Landscape Ecology 8:155-162. Loveland, T R., J. W. Merchant, D. 0. Ohlen, and J. F Brown. 1991. Development of a landcover characteristics database for the conterminous U.S. Photogrammetric Engineering and Remote Sensing 57:1453-1463. Marcot, B. G., R. S. Holthausen, J. Teply, and W. D. Carrier. 1991. Old-growth inventories: status, definitions, and visions for the future. Pages 47-60 in L. F Ruggiero, K. B. Aubry, A. B. Carey, and M. H. Huff, editors. Wildlife and vegetation of unmanaged Douglas-fir forests. U.S. Forest Service Pacific Northwest Research Station PNW-GTR285. McKelvey, K., B. R. Noon, and R. H. Lamberson. 1993. Conservation planning for species occupying fragmented landscapes: the case of the northern spotted owl. Pages 424-450 in P. M. Kareiva, J. G. Kingsolver, and R. B. Huey,
editors. Biotic interactions and global change. Sinauer, Sunderland, Massachusetts, USA. Miller, R. I., S. N. Simon, and K. M. Howell. 1989. A methodology for analyzing rare species distribution patterns utilizing GIS technology: the rare birds of Tanzania. Landscape Ecology 2:173-189. Milne, B. T. 1988. Measuring the fractal geometry of landscapes. Applied Mathematics and Computation 27:67-79. . 1991. Lessons from applying fractal models to landscape patterns. Pages 199-235 in M. G. Turner and R. H. Gardner, editors. Quantitative methods in landscape ecology. Springer-Verlag, New York, New York, USA. Morrison, P. H., D. Kloepfer, D. A. Leversee, C. M. Socha, and D. L. Ferber. 1991. Ancient forests in the Pacific Northwest. The Wilderness Society, Washington, D.C., USA. Noss, R. F 1990. Indicators for monitoring biodiversity: a hierarchical approach. Conservation Biology 4:355-364. Old-Growth Definition Task Group. 1986. Interim definitions for old-growth Douglas-fir and mixed conifer forests in the Pacific Northwest and California. U.S. Forest Service Pacific Northwest Research Station Research Note PNW-447. O'Neill, R. V., J. R. Krummel, R. H. Gardner, G. Sugihara, B. Jackson, D. L. DeAngelis, B. T. Milne, M. G. Turner, B. Zygmunt, S. W. Christensen, V. H. Dale, and R. L. Graham. 1988. Indices of landscape pattern. Landscape Ecology 1:153-162. Patton, D. R. 1975. A diversity index for quantifying habitat "edge". Wildlife Society Bulletin 3:171-173. Plotnick, R. E., R. H. Gardner, and R. V. O'Neill. 1993. Lacunarity indices as measures of landscape texture. Landscape Ecology 8:201-211. Pulliam, H. R. 1988. Sources, sinks, and population regulation. American Naturalist 132:652-661. Pulliam, H. R., J. B. Dunning, Jr., and J. Liu. 1992. Population dynamics in complex landscapes: a case study. Ecological Applications 2:165-177. Ripple, W. J., G. A. Bradshaw, and T A. Spies. 1991. Measuring forest landscape patterns in the Cascade range of Oregon, USA. Biological Conservation 57:73-88. Saunders, D. A., R. J. Hobbs, and C. R. Margules. 1991. Biological consequences of ecosystem fragmentation: a review. Conservation Biology 5:18-32. Shaw, D. M., and S. F Atkinson. 1990. An introduction to the use of geographic information systems for ornithological research. Condor 92:564-570. Stamps, J. A., M. Buechner, and V. V. Krishnan. 1987. The effects of edge permeability and habitat geometry on emigration from patches of habitat. American Naturalist 129: 533-552. Taylor, P. D., L. Fahrig, K. Henein, and G. Merriam. 1993. Connectivity is a vital element of landscape structure. Oikos 68:571-573. Thomas, J. W., E. D. Forsman, J. B. Lint, E. C. Meslow, B. R. Noon, and J. Verner. 1990. A conservation strategy for the Northern Spotted Owl: report to the interagency scientific committee to address the conservation of the Northern Spotted Owl. United States Government Printing Office, Washington, D.C., USA. Turner,M. G. 1989. Landscape ecology: the effect of pattern on process. Annual Review of Ecology and Systematics 20:171-197. . 1990. Spatial and temporal analysis of landscape patterns. Landscape Ecology 4:21-30. Turner, M. G., G. J. Arthaud, R. T. Engstrom, S. J. Hejl, J. Liu, S. Loeb, and K. McKelvey. 1995. Usefulness of spatially explicit population models in land management. Ecological Applications 5:12-16. Turner, M. G., R. Costanza, and F H. Sklar. 1989b. Methods
June 1996
PREDICTINGHABITAT CONNECTIVITY
1225
to evaluate the performance of spatial simulation models. Ecological Modelling 48:1-18. Turner, M. G., R. H. Gardner, V. H. Dale, and R. V. O'Neill. 1989a. Predicting the spread of disturbance across heterogeneous landscapes. Oikos 55:121-129. Whitcomb, R. E, J. F Lynch, M. K. Klimkiewicz, C. S. Robbins, B. L. Whitcomb, and D. Bystrak. 1981. Effects of
forest fragmentation on avifauna of the eastern deciduous forest. Pages 125-206 in R. L. Burgess and D. M. Sharpe, editors. Forest island dynamics in man-dominated landscapes. Springer-Verlag, New York, New York, USA. Yahner, R. H. 1988. Changes in wildlife communities near edges. Conservation Biology 2:333-339.
Potrebbero piacerti anche
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (587)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (265)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (119)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Great Himalayan National Park inscribed as UNESCO World Heritage SiteDocumento2 pagineGreat Himalayan National Park inscribed as UNESCO World Heritage SiteRashmi KumariNessuna valutazione finora
- A Biological Assessment of Parque Natural Noel Kempff Mercado, BoliviaDocumento375 pagineA Biological Assessment of Parque Natural Noel Kempff Mercado, BoliviaNicsauliNessuna valutazione finora
- Mumbai Metro Rail Job Notification 2013Documento1 paginaMumbai Metro Rail Job Notification 2013CareerNotifications.comNessuna valutazione finora
- Sundernagar ReportDocumento17 pagineSundernagar ReportwiweksharmaNessuna valutazione finora
- Grand Boulevard Renaissance Development To Revitalize Jean Klock ParkDocumento24 pagineGrand Boulevard Renaissance Development To Revitalize Jean Klock ParkProtectJKPNessuna valutazione finora
- Hydrology of Urban Playa Lakes in Lubbock TexasDocumento155 pagineHydrology of Urban Playa Lakes in Lubbock TexasTor EiamkarnNessuna valutazione finora
- (1931) The Marion and General Greene Expeditions To Davis Strait and Labrador SeaDocumento334 pagine(1931) The Marion and General Greene Expeditions To Davis Strait and Labrador SeaHerbert Hillary Booker 2ndNessuna valutazione finora
- Potential Earthquake Hazards and Their Effects v2 PDFDocumento35 paginePotential Earthquake Hazards and Their Effects v2 PDFLawrence CezarNessuna valutazione finora
- Population of Cities in Nigeria (2019)Documento25 paginePopulation of Cities in Nigeria (2019)Gbadeyanka O WuraolaNessuna valutazione finora
- Ryuutama Holiday Package 2014 PDFDocumento27 pagineRyuutama Holiday Package 2014 PDFfluggleNessuna valutazione finora
- History of Projection and Coordinate System in Malaysia PDFDocumento41 pagineHistory of Projection and Coordinate System in Malaysia PDFWan FarihahNessuna valutazione finora
- Baldwin Hills Park Planning Workshop AppendicesDocumento20 pagineBaldwin Hills Park Planning Workshop AppendicesEmpowerment Congress West Area Neighborhood Development CouncilNessuna valutazione finora
- Uncovering Cameroon's PastDocumento60 pagineUncovering Cameroon's PastJac StrijbosNessuna valutazione finora
- Bird NavigationDocumento34 pagineBird Navigation畏Nessuna valutazione finora
- Chapter 5-Highway Geometric DesignDocumento12 pagineChapter 5-Highway Geometric DesignskumarsrNessuna valutazione finora
- Embankment Failure in UKDocumento17 pagineEmbankment Failure in UKAri SentaniNessuna valutazione finora
- Africa Pilot Pub123bkDocumento170 pagineAfrica Pilot Pub123bkydmisraNessuna valutazione finora
- Protocol Acclimatisation Everest 2017Documento12 pagineProtocol Acclimatisation Everest 2017Leandro Reina PérezNessuna valutazione finora
- Volcano Concept Map - COTDocumento53 pagineVolcano Concept Map - COTArvie Jay Castillo0% (1)
- Linguistic Survey of Milagros, Masbate-Edited VersionDocumento60 pagineLinguistic Survey of Milagros, Masbate-Edited VersionMihael Rosero100% (1)
- Assorted Trig Application ProblemsDocumento9 pagineAssorted Trig Application ProblemsAnthony RelatorNessuna valutazione finora
- Dgps/Ins/Vvheelsensor Integration For High Accuracy Land-Vehicle PositioningDocumento10 pagineDgps/Ins/Vvheelsensor Integration For High Accuracy Land-Vehicle PositioningRăzvan PopaNessuna valutazione finora
- Aerodrome Chart MARING' / Slvio Name Jœnior (SBMG) : ARP S23 28 46 W052 00 44 PR - BrasilDocumento2 pagineAerodrome Chart MARING' / Slvio Name Jœnior (SBMG) : ARP S23 28 46 W052 00 44 PR - BrasilAndrez JanuarioNessuna valutazione finora
- Agents of ErosionDocumento1 paginaAgents of ErosionJoya Sugue AlforqueNessuna valutazione finora
- Pub. 163 Borneo, Jawa, Sulawesi, and Nusa Tenggara (Enroute), 12th Ed 2011Documento372 paginePub. 163 Borneo, Jawa, Sulawesi, and Nusa Tenggara (Enroute), 12th Ed 2011cavrisNessuna valutazione finora
- Protection From Coastal ErosionDocumento30 pagineProtection From Coastal ErosionHaryo ArmonoNessuna valutazione finora
- Native American Creation StoriesDocumento14 pagineNative American Creation StoriesadaletNessuna valutazione finora
- Malta: Public International LawDocumento8 pagineMalta: Public International LawKirithika HariharanNessuna valutazione finora
- Groundwater Zones and PropertiesDocumento18 pagineGroundwater Zones and PropertiestriciasevenNessuna valutazione finora