Potrebbero piacerti anche
- VSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsDa EverandVSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsNessuna valutazione finora
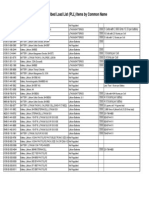
- Crystal Reports - Arc-Flash Look-Up TableDocumento8 pagineCrystal Reports - Arc-Flash Look-Up TableMWBABARNessuna valutazione finora
- Chapter Three: Fault Study, Analysis and Short Circuit CalculationsDocumento23 pagineChapter Three: Fault Study, Analysis and Short Circuit Calculationsmuaz_aminu1422Nessuna valutazione finora
- HT Switchgear RequirementsDocumento22 pagineHT Switchgear Requirementskankw879Nessuna valutazione finora
- Equipment Damage Curves ConductorsDocumento8 pagineEquipment Damage Curves ConductorsBrenda Naranjo MorenoNessuna valutazione finora
- Russia Russia: Caspian Sea Aral Sea Caspian Sea Aral SeaDocumento1 paginaRussia Russia: Caspian Sea Aral Sea Caspian Sea Aral SeaSherali JononovNessuna valutazione finora
- ASCO Switching The Neutral ConductorDocumento8 pagineASCO Switching The Neutral ConductorJOSE LUIS FALCON CHAVEZNessuna valutazione finora
- RL - AM-,WWY-: TRV Rating Concepts and Iec Standards TRV EnvelopesDocumento17 pagineRL - AM-,WWY-: TRV Rating Concepts and Iec Standards TRV EnvelopesDestinifyd Mydestiny100% (1)
- MasterThesis Basem Idlbi (Documento119 pagineMasterThesis Basem Idlbi (GuruxyzNessuna valutazione finora
- P17 7XF02NAA Transformer Main 2 Protection PanelDocumento76 pagineP17 7XF02NAA Transformer Main 2 Protection PanelREY PAMELO NAVARRONessuna valutazione finora
- HVDC FinalDocumento26 pagineHVDC FinalGoutham MadarapuNessuna valutazione finora
- Transformers Damage Curves For ThroughDocumento9 pagineTransformers Damage Curves For Throughfahri-aminudin-4228Nessuna valutazione finora
- Short-Circuit Current CalculationsDocumento10 pagineShort-Circuit Current CalculationsBash MatNessuna valutazione finora
- Auxiliary RelayDocumento5 pagineAuxiliary RelayVijayaganthaan VisvanatthanNessuna valutazione finora
- WBN028 - B1.47 - Mar21Documento63 pagineWBN028 - B1.47 - Mar21E PenaNessuna valutazione finora
- Compact Power Transformers For Substation in Urban Areas Using Hybrid Insulation SystemDocumento8 pagineCompact Power Transformers For Substation in Urban Areas Using Hybrid Insulation SystemR0B0T2013Nessuna valutazione finora
- 236 CT PDFDocumento3 pagine236 CT PDFHimanshu RanjanNessuna valutazione finora
- Modeling of Power Networks by ATP-Draw For Harmonics Propagation StudyDocumento8 pagineModeling of Power Networks by ATP-Draw For Harmonics Propagation StudyrogeriojuruaiaNessuna valutazione finora
- CYMGRD 6.3 For Windows: User'S Guide and Reference ManualDocumento141 pagineCYMGRD 6.3 For Windows: User'S Guide and Reference ManualJhon100% (1)
- ABB KR 2500kVA Al Conductor - DatasheetDocumento1 paginaABB KR 2500kVA Al Conductor - DatasheetNguyễn Ngọc ChungNessuna valutazione finora
- Snubbers:: Protecting Medium-Voltage Transformers From Electrical TransientsDocumento4 pagineSnubbers:: Protecting Medium-Voltage Transformers From Electrical TransientsANTONIO SOLISNessuna valutazione finora
- RM6 ManualDocumento56 pagineRM6 ManualMuhammed DemirNessuna valutazione finora
- Alstom T155 - 420 - kV-72451-2013 - 05-EN-lDocumento4 pagineAlstom T155 - 420 - kV-72451-2013 - 05-EN-lNikin JayswalNessuna valutazione finora
- Transient Over VoltagesDocumento38 pagineTransient Over Voltagesraghav4life8724Nessuna valutazione finora
- Available Fault Current Selective Coordination SpreadsheetDocumento20 pagineAvailable Fault Current Selective Coordination SpreadsheetOmer SyedNessuna valutazione finora
- 7kg6000 Transducer SpecificationDocumento8 pagine7kg6000 Transducer SpecificationwiyatnoNessuna valutazione finora
- Modeling of WPP For Short Circuit AnalysisDocumento7 pagineModeling of WPP For Short Circuit AnalysisbalajisugunaNessuna valutazione finora
- Static Synchronous Compensators STATCOMDocumento4 pagineStatic Synchronous Compensators STATCOMrajfabNessuna valutazione finora
- Transient Overvoltages and Insulation CoordinationDocumento9 pagineTransient Overvoltages and Insulation CoordinationCristian Santana Rodriguez0% (1)
- HarmonicsDocumento84 pagineHarmonicsAntonio Olmedo AvalosNessuna valutazione finora
- Pirelli PDFDocumento24 paginePirelli PDFFarhan ShahNessuna valutazione finora
- Rees DfigDocumento50 pagineRees DfigSoham KaryakarteNessuna valutazione finora
- Schneider Elect. CT PTDocumento48 pagineSchneider Elect. CT PThemantgupta226Nessuna valutazione finora
- Type VHXM: Under / Over Voltage RelayDocumento6 pagineType VHXM: Under / Over Voltage RelayNikki AgarwalNessuna valutazione finora
- ETAP PowerLab 2012 Rev 9Documento2 pagineETAP PowerLab 2012 Rev 9Engr Rab Nawaz ButtNessuna valutazione finora
- Transformer Tap Setting in Optimal Load FlowDocumento7 pagineTransformer Tap Setting in Optimal Load FlowjhongeralpeNessuna valutazione finora
- OPP06342A1 - Generator Technical DataDocumento18 pagineOPP06342A1 - Generator Technical DataVijayaNessuna valutazione finora
- Current Transformer Sizing & Saturation Calculation With Transient Performance Analysis of CT Using ATP SoftwareDocumento8 pagineCurrent Transformer Sizing & Saturation Calculation With Transient Performance Analysis of CT Using ATP SoftwareInvyteNessuna valutazione finora
- Type VHXM: Under / Over Voltage RelayDocumento6 pagineType VHXM: Under / Over Voltage RelayAmit KumarNessuna valutazione finora
- One Corner of The Delta TertiryDocumento6 pagineOne Corner of The Delta TertiryaocalayNessuna valutazione finora
- EPSH4 - 1031 - PS - Stability Research PDFDocumento201 pagineEPSH4 - 1031 - PS - Stability Research PDFyesar laftaNessuna valutazione finora
- UPFC Detailed Model MATLAB and SimulinkDocumento3 pagineUPFC Detailed Model MATLAB and SimulinkEdilberto MJNessuna valutazione finora
- Typical Surge Arrester VI Characteristic Plotting Excel WorkbookDocumento12 pagineTypical Surge Arrester VI Characteristic Plotting Excel Workbookhey_frindNessuna valutazione finora
- Insulation Coordination PresentationDocumento42 pagineInsulation Coordination PresentationAyanangshu ChakrabartyNessuna valutazione finora
- SEP-603 RET 670 Transformer Diff Operate-Restrain CalculatorDocumento7 pagineSEP-603 RET 670 Transformer Diff Operate-Restrain CalculatorvanitaNessuna valutazione finora
- Single-Phase Power TransformersDocumento140 pagineSingle-Phase Power TransformersKathryn ChanNessuna valutazione finora
- 04 Fault CalculationsDocumento15 pagine04 Fault Calculationsapi-3750225100% (1)
- Knowledge is "Real Power": Introduction to Power QualityDa EverandKnowledge is "Real Power": Introduction to Power QualityNessuna valutazione finora
- The Technology of Instrument Transformers: Current and Voltage Measurement and Insulation SystemsDa EverandThe Technology of Instrument Transformers: Current and Voltage Measurement and Insulation SystemsNessuna valutazione finora
- Current Interruption Transients CalculationDa EverandCurrent Interruption Transients CalculationValutazione: 4 su 5 stelle4/5 (1)
- Real-Time Simulation Technology for Modern Power ElectronicsDa EverandReal-Time Simulation Technology for Modern Power ElectronicsNessuna valutazione finora
- Power Synchronization Control of VSC-HVDC Transmission For Weak Ac SystemDocumento5 paginePower Synchronization Control of VSC-HVDC Transmission For Weak Ac SystemGuru MishraNessuna valutazione finora
- Mitigation of Sub Synchronous Oscillations in ADocumento7 pagineMitigation of Sub Synchronous Oscillations in ARamesh GosuNessuna valutazione finora
- An Electromagnetic Transient Simulation Model ForDocumento4 pagineAn Electromagnetic Transient Simulation Model ForMohit Kumar ChowdaryNessuna valutazione finora
- Engineering Journal Modeling, Control and Steady State Analysis of Back To Back VSC HVDC SystemDocumento6 pagineEngineering Journal Modeling, Control and Steady State Analysis of Back To Back VSC HVDC SystemEngineering JournalNessuna valutazione finora
- Development and Application of New Condition Assessment Methods For Power TransformersDocumento10 pagineDevelopment and Application of New Condition Assessment Methods For Power TransformersRoy Dz HutapeaNessuna valutazione finora
- Denah Tanah ModelDocumento1 paginaDenah Tanah ModelRoy Dz HutapeaNessuna valutazione finora
- Current in Amperes: PD-0003 PD-0003Documento1 paginaCurrent in Amperes: PD-0003 PD-0003Roy Dz HutapeaNessuna valutazione finora
- SKM Power ToolsDocumento1 paginaSKM Power ToolsRoy Dz HutapeaNessuna valutazione finora
- Acoustica LabelDocumento1 paginaAcoustica LabelRoy Dz HutapeaNessuna valutazione finora
- Current in Amperes: PD-0003 PD-0003Documento1 paginaCurrent in Amperes: PD-0003 PD-0003Roy Dz HutapeaNessuna valutazione finora
- Switch Gear and SF6 GasDocumento40 pagineSwitch Gear and SF6 GasممشطNessuna valutazione finora
- Peake ODocumento8 paginePeake ORoy Dz HutapeaNessuna valutazione finora
- Lithium BatteriesDocumento6 pagineLithium BatteriesRoy Dz Hutapea0% (1)
- Generation of High Voltage Using Cockcroft-Walton Voltage Multiplier CircuitDocumento18 pagineGeneration of High Voltage Using Cockcroft-Walton Voltage Multiplier Circuitroute2rahulNessuna valutazione finora
- 05 편집Documento8 pagine05 편집sajuaanalsaNessuna valutazione finora
- EZ Water Calculator 3.0.2Documento4 pagineEZ Water Calculator 3.0.2adriano70Nessuna valutazione finora
- PGCRSM-01-BLOCK-03 Research Design ExperimentalDocumento29 paginePGCRSM-01-BLOCK-03 Research Design ExperimentalVijilan Parayil VijayanNessuna valutazione finora
- Etextbook PDF For Pharmacology Connections To Nursing Practice 3rd EditionDocumento61 pagineEtextbook PDF For Pharmacology Connections To Nursing Practice 3rd Editionkarla.woodruff22798% (45)
- L5V 00004Documento2 pagineL5V 00004Jhon LinkNessuna valutazione finora
- Community Architecture Concept PDFDocumento11 pagineCommunity Architecture Concept PDFdeanNessuna valutazione finora
- Iec Codes PDFDocumento257 pagineIec Codes PDFAkhil AnumandlaNessuna valutazione finora
- Spare Part PhilosophyDocumento27 pagineSpare Part Philosophyavaisharma50% (2)
- Ismb ItpDocumento3 pagineIsmb ItpKumar AbhishekNessuna valutazione finora
- Lesser Known Homoeopathic Medicines of Alopecia Areata.20200718115446Documento9 pagineLesser Known Homoeopathic Medicines of Alopecia Areata.20200718115446BruntNessuna valutazione finora
- Microwave EngineeringDocumento2 pagineMicrowave Engineeringசுந்தர் சின்னையா0% (9)
- Additional Article Information: Keywords: Adenoid Cystic Carcinoma, Cribriform Pattern, Parotid GlandDocumento7 pagineAdditional Article Information: Keywords: Adenoid Cystic Carcinoma, Cribriform Pattern, Parotid GlandRizal TabootiNessuna valutazione finora
- 300u Specs Diodo 300 Amps. 25 Dolares RadiosurtidoraDocumento6 pagine300u Specs Diodo 300 Amps. 25 Dolares RadiosurtidorarepelindNessuna valutazione finora
- Guncha Arora: Professional Profile Career HistoryDocumento1 paginaGuncha Arora: Professional Profile Career HistoryNitin MahawarNessuna valutazione finora
- CCDocumento5 pagineCCnazmulNessuna valutazione finora
- Chapter 20 AP QuestionsDocumento6 pagineChapter 20 AP QuestionsflorenciashuraNessuna valutazione finora
- KCG-2001I Service ManualDocumento5 pagineKCG-2001I Service ManualPatrick BouffardNessuna valutazione finora
- PreviewpdfDocumento29 paginePreviewpdfSoemarlan ErlanNessuna valutazione finora
- Reflection in Sexually Transmitted DiseaseDocumento1 paginaReflection in Sexually Transmitted Diseasewenna janeNessuna valutazione finora
- Test Bank For The Psychology of Health and Health Care A Canadian Perspective 5th EditionDocumento36 pagineTest Bank For The Psychology of Health and Health Care A Canadian Perspective 5th Editionload.notablewp0oz100% (37)
- Literature Review of Service Quality in RestaurantsDocumento7 pagineLiterature Review of Service Quality in RestaurantsuifjzvrifNessuna valutazione finora
- Digital Electronics Chapter 5Documento30 pagineDigital Electronics Chapter 5Pious TraderNessuna valutazione finora
- Green Dot ExtractDocumento25 pagineGreen Dot ExtractAllen & UnwinNessuna valutazione finora
- An Eastern Orthodox Understanding of The Dangers of Modernity and TechnologyDocumento10 pagineAn Eastern Orthodox Understanding of The Dangers of Modernity and TechnologyTimothy ZelinskiNessuna valutazione finora
- Quanta To QuarksDocumento32 pagineQuanta To QuarksDaniel Bu100% (5)
- Web-Based Attendance Management System Using Bimodal Authentication TechniquesDocumento61 pagineWeb-Based Attendance Management System Using Bimodal Authentication TechniquesajextopeNessuna valutazione finora
- Power System TransientsDocumento11 paginePower System TransientsKhairul AshrafNessuna valutazione finora
- CTS2 HMU Indonesia - Training - 09103016Documento45 pagineCTS2 HMU Indonesia - Training - 09103016Resort1.7 Mri100% (1)
- Fortigate Firewall Version 4 OSDocumento122 pagineFortigate Firewall Version 4 OSSam Mani Jacob DNessuna valutazione finora
- Toshiba MotorsDocumento16 pagineToshiba MotorsSergio Cabrera100% (1)
- Sermon Manuscript Galatians 5:16-26Documento9 pagineSermon Manuscript Galatians 5:16-26Nathaniel ParkerNessuna valutazione finora