Potrebbero piacerti anche
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- Class 1 First Law of Thermodynamics, First Law For Closed Systems - Constant Pressure Process, Constant VolumeDocumento40 pagineClass 1 First Law of Thermodynamics, First Law For Closed Systems - Constant Pressure Process, Constant VolumeBharathiraja MoorthyNessuna valutazione finora
- Class 2 IntroductionDocumento45 pagineClass 2 IntroductionBharathiraja MoorthyNessuna valutazione finora
- Class 2 Formation of Pollutants, Photochemical SmogDocumento38 pagineClass 2 Formation of Pollutants, Photochemical SmogBharathiraja MoorthyNessuna valutazione finora
- Stratified Charged EngineDocumento21 pagineStratified Charged EngineDeepak Gupta100% (9)
- Thermodynamic SystemsDocumento41 pagineThermodynamic SystemsBharathiraja MoorthyNessuna valutazione finora
- Activity 1Documento2 pagineActivity 1Bharathiraja MoorthyNessuna valutazione finora
- Class 4 Transient Operational Effects On PollutionDocumento37 pagineClass 4 Transient Operational Effects On PollutionBharathiraja Moorthy0% (1)
- Class 4 Zeroth Law of ThermodynamicsDocumento29 pagineClass 4 Zeroth Law of ThermodynamicsBharathiraja MoorthyNessuna valutazione finora
- Class 2 IntroductionDocumento45 pagineClass 2 IntroductionBharathiraja MoorthyNessuna valutazione finora
- Class 3 Effects On Human Health and Environment, Global Warming and Types of Emission PDFDocumento33 pagineClass 3 Effects On Human Health and Environment, Global Warming and Types of Emission PDFBharathiraja MoorthyNessuna valutazione finora
- PT I QP 18AU405 Applied Thermodynamics and Heat TransferDocumento7 paginePT I QP 18AU405 Applied Thermodynamics and Heat TransferBharathiraja MoorthyNessuna valutazione finora
- Automotive Emission Learning Format Explains Objectives, TopicsDocumento29 pagineAutomotive Emission Learning Format Explains Objectives, TopicsBharathiraja MoorthyNessuna valutazione finora
- LabVIEW Temperature Control SimulationDocumento2 pagineLabVIEW Temperature Control SimulationBharathiraja MoorthyNessuna valutazione finora
- Unit 1 - AnswersDocumento5 pagineUnit 1 - AnswersBharathiraja MoorthyNessuna valutazione finora
- Unit IiDocumento32 pagineUnit IiAdhwareshBharadwajNessuna valutazione finora
- Properties of Pure Substance and Steam Power Cycle Pure SubstanceDocumento43 pagineProperties of Pure Substance and Steam Power Cycle Pure SubstanceSachin SinghNessuna valutazione finora
- Internal Combustion Engines FuelDocumento28 pagineInternal Combustion Engines FuelJoydip PaulNessuna valutazione finora
- Unit 4 RemainingDocumento20 pagineUnit 4 RemainingBharathiraja MoorthyNessuna valutazione finora
- 151127nh PR Larmi PDFDocumento39 pagine151127nh PR Larmi PDFBharathiraja MoorthyNessuna valutazione finora
- 151127nh PR Larmi PDFDocumento39 pagine151127nh PR Larmi PDFBharathiraja MoorthyNessuna valutazione finora
- Vehicle Sensor and Driver Instrumentation Air Flow Sensor FunctionDocumento16 pagineVehicle Sensor and Driver Instrumentation Air Flow Sensor FunctionBharathiraja MoorthyNessuna valutazione finora
- The Institution of Engineers (India) : Call For PapersDocumento3 pagineThe Institution of Engineers (India) : Call For PapersBharathiraja MoorthyNessuna valutazione finora
- 03 Ajrssh PDFDocumento21 pagine03 Ajrssh PDFBharathiraja MoorthyNessuna valutazione finora
- Thermal ManualDocumento152 pagineThermal ManualBharathiraja MoorthyNessuna valutazione finora
- Experimental Investigation of Novel Methanol Fumigation On Single Cylinder Constant Speed Diesel EngineDocumento7 pagineExperimental Investigation of Novel Methanol Fumigation On Single Cylinder Constant Speed Diesel EngineBharathiraja MoorthyNessuna valutazione finora
- 16 JasrDocumento15 pagine16 JasrBharathiraja MoorthyNessuna valutazione finora
- Vehicle Dynamics PDFDocumento281 pagineVehicle Dynamics PDFRishabh Pal100% (2)
- Comparison Study of Existing Bowl Piston and Modified Bowl Piston Diesel Engine Performance Emission and Combustion Characteristics by Using DieselDocumento9 pagineComparison Study of Existing Bowl Piston and Modified Bowl Piston Diesel Engine Performance Emission and Combustion Characteristics by Using DieselVENKATNessuna valutazione finora
- 03 Ajrssh PDFDocumento21 pagine03 Ajrssh PDFBharathiraja MoorthyNessuna valutazione finora
- 16 JasrDocumento15 pagine16 JasrBharathiraja MoorthyNessuna valutazione finora
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (119)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- ZhangDocumento21 pagineZhangjajajaja21Nessuna valutazione finora
- EnergySRP Forms MatchingDocumento2 pagineEnergySRP Forms Matchingeiad-mahmoudNessuna valutazione finora
- 03 MAN D2Z2IM ACT350xx ENDocumento24 pagine03 MAN D2Z2IM ACT350xx ENAlfonso Lopez toroNessuna valutazione finora
- Valve Material ApplicationDocumento16 pagineValve Material Applicationehab8320014413100% (1)
- CV - Alok Singh - Tech HSE & Loss Prevention Engineer (May-2018)Documento5 pagineCV - Alok Singh - Tech HSE & Loss Prevention Engineer (May-2018)toalok4723Nessuna valutazione finora
- Installation Manual E-Brick en LoresDocumento80 pagineInstallation Manual E-Brick en LoresvideoramirezNessuna valutazione finora
- Thermal Shock Resistant Neoceram Glass-CeramicDocumento2 pagineThermal Shock Resistant Neoceram Glass-CeramicAmândio PintoNessuna valutazione finora
- Microcontroller-Based Power Monitoring for COE RoomsDocumento8 pagineMicrocontroller-Based Power Monitoring for COE Roomskenneth_molenilla1475Nessuna valutazione finora
- Test Bank For Achieve For Interactive General Chemistry, 1e by Macmillan Learning Test BankDocumento9 pagineTest Bank For Achieve For Interactive General Chemistry, 1e by Macmillan Learning Test BankNail BaskoNessuna valutazione finora
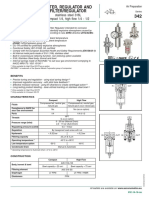
- Numatics Series 342Documento6 pagineNumatics Series 342Jebran FarazNessuna valutazione finora
- Graviner MK6 Oil Mist DetectorDocumento4 pagineGraviner MK6 Oil Mist DetectorDhanielNessuna valutazione finora
- Wiring Diagram FH, NH: GroupDocumento110 pagineWiring Diagram FH, NH: GroupStefan AslamNessuna valutazione finora
- Q 1000Documento24 pagineQ 1000Fredy Vázquez VelázquezNessuna valutazione finora
- Kiln Audit Heat Balance Tool - Data Entry Sheet 4 - CoolerDocumento1 paginaKiln Audit Heat Balance Tool - Data Entry Sheet 4 - CoolerMohamed SelimNessuna valutazione finora
- 4,5. Transformers (1 Phase & 3 Phase)Documento48 pagine4,5. Transformers (1 Phase & 3 Phase)nakkasrinuNessuna valutazione finora
- Table 4E4A - Current Carrying Capacity in AmpereDocumento1 paginaTable 4E4A - Current Carrying Capacity in AmperesalvuNessuna valutazione finora
- cg-600 p2Documento1 paginacg-600 p2mdishong27Nessuna valutazione finora
- KR AGILUS Hygienic Machine Fast Cleaning Food PharmaDocumento2 pagineKR AGILUS Hygienic Machine Fast Cleaning Food PharmaValke Athletes HandcareNessuna valutazione finora
- Ptmail - m1021 - Ss - Ev Ultimate Market Intelligence ReportDocumento23 paginePtmail - m1021 - Ss - Ev Ultimate Market Intelligence ReportPIYUSH GOPALNessuna valutazione finora
- New Tutorial 2 Solution On ThermodynamicsDocumento7 pagineNew Tutorial 2 Solution On ThermodynamicsNaveed AhmadNessuna valutazione finora
- 2013 Renault ZOE PresskitDocumento34 pagine2013 Renault ZOE PresskitDidelisNessuna valutazione finora
- Nutrition For AthletesDocumento37 pagineNutrition For AthletesAnonymous e1sArVj5zl100% (1)
- Type 316 Stainless Steel Properties & ApplicationsDocumento3 pagineType 316 Stainless Steel Properties & Applicationsh4josephNessuna valutazione finora
- Air Cooler LeafletDocumento2 pagineAir Cooler LeafletSaad zubayr MNessuna valutazione finora
- AC Biasing in TransisterDocumento61 pagineAC Biasing in TransisterHariom RavatNessuna valutazione finora
- Water Level IndicatorDocumento5 pagineWater Level IndicatorRahul JadhavNessuna valutazione finora
- PPTs ON BONTON CABLESDocumento10 paginePPTs ON BONTON CABLESShaishav Anand100% (1)
- SOF National Science Olympiad 2018-19 GuidelinesDocumento7 pagineSOF National Science Olympiad 2018-19 GuidelinesRahul SinhaNessuna valutazione finora
- CH 3 Gas Refrigeration CycleDocumento20 pagineCH 3 Gas Refrigeration CycleMeleseNessuna valutazione finora
- Solutions To ExercisesDocumento47 pagineSolutions To ExercisesNathan D. Gutzmann60% (5)