Potrebbero piacerti anche
- DC Motor Drives 2007Documento48 pagineDC Motor Drives 2007stubborn002Nessuna valutazione finora
- Ti Digital Motor Control SolutDocumento120 pagineTi Digital Motor Control SolutJavier ToscanoNessuna valutazione finora
- Motor 2Documento49 pagineMotor 2api-247714257Nessuna valutazione finora
- Direct Torque Control of Induction MotorDocumento37 pagineDirect Torque Control of Induction Motorpuria_rishabhNessuna valutazione finora
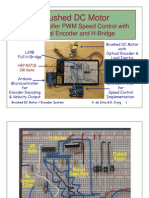
- Marwan K. Abbadi Advisor: Dr. Winfred AnakwaDocumento35 pagineMarwan K. Abbadi Advisor: Dr. Winfred AnakwaAniruddha NarkhedeNessuna valutazione finora
- AC To DC Power Conversion IEEEDocumento40 pagineAC To DC Power Conversion IEEEvthiyagainNessuna valutazione finora
- Servo MotorDocumento16 pagineServo MotorMinh Tuan Tran100% (1)
- G.H.Raisoni College of Enginering: Modified Integration Method For Direct Torque Control of Induction Motor DrivesDocumento35 pagineG.H.Raisoni College of Enginering: Modified Integration Method For Direct Torque Control of Induction Motor DrivesAbhinav G. KhandekarNessuna valutazione finora
- 5 - Control System TrainerDocumento50 pagine5 - Control System TrainerGadam Siva Charan DasNessuna valutazione finora
- Servo Motor Modelling Using Bump Test: Expt - No-8 Aditya Das 17BEE0267Documento3 pagineServo Motor Modelling Using Bump Test: Expt - No-8 Aditya Das 17BEE0267ADITYA DAS 17BEE0267Nessuna valutazione finora
- DC Motor DrivesDocumento53 pagineDC Motor DrivesManoj NNessuna valutazione finora
- Lecture-16-Direct Torque Control PDFDocumento33 pagineLecture-16-Direct Torque Control PDFKriban Govender100% (1)
- Today: Inverter + PMSM Control: 3 Phase Inverter (DC To AC) 3 Phase Electric MachineDocumento29 pagineToday: Inverter + PMSM Control: 3 Phase Inverter (DC To AC) 3 Phase Electric Machineciprian167Nessuna valutazione finora
- Servo MotorDocumento18 pagineServo MotorMinh HảiNessuna valutazione finora
- SensorsDocumento39 pagineSensorsS.m. FerdousNessuna valutazione finora
- Design & Manufacturing An Inclined ElevatorDocumento50 pagineDesign & Manufacturing An Inclined Elevatorf412ul_iv100% (1)
- Resonant&Buck ChopperDocumento18 pagineResonant&Buck ChopperKata Naresh BabuNessuna valutazione finora
- 3 Phase Induction Motor Speed and Torque ControlDocumento25 pagine3 Phase Induction Motor Speed and Torque ControlAwais SaeedNessuna valutazione finora
- Digital Signal Processor Based Vbyf Control of Speed of Induction MotorDocumento24 pagineDigital Signal Processor Based Vbyf Control of Speed of Induction MotorManu JainNessuna valutazione finora
- 1 SMDocumento7 pagine1 SMaswardi8756Nessuna valutazione finora
- Direct Torque Control of Induction Machine: Dr. Nik Rumzi Nik IdrisDocumento29 pagineDirect Torque Control of Induction Machine: Dr. Nik Rumzi Nik IdrissrinupidNessuna valutazione finora
- 26 - Control System Diagram (CSD)Documento18 pagine26 - Control System Diagram (CSD)Egyptman JanNessuna valutazione finora
- Closed Loop Control NewDocumento47 pagineClosed Loop Control NewDr.K.Krishna Veni ProfessorNessuna valutazione finora
- 060 Actuators For RobotsDocumento69 pagine060 Actuators For RobotsMohamad YazidNessuna valutazione finora
- Position Control of Hybrid Stepper MotorDocumento36 paginePosition Control of Hybrid Stepper MotorAditya ChaudharyNessuna valutazione finora
- Ut Em3 Variablefreqdrivetheory PDFDocumento86 pagineUt Em3 Variablefreqdrivetheory PDFMichael JohnstonNessuna valutazione finora
- Maxon 145391Documento2 pagineMaxon 145391Mathieu BrasseurNessuna valutazione finora
- Topic 5: Servo Chip DesignDocumento50 pagineTopic 5: Servo Chip Designboarddk1Nessuna valutazione finora
- Introduction To InvertersDocumento27 pagineIntroduction To Invertersselaroth168Nessuna valutazione finora
- 00908a - Using The DsPIC30F For Vector Control of An ACIMDocumento76 pagine00908a - Using The DsPIC30F For Vector Control of An ACIMJandfor Tansfg ErrottNessuna valutazione finora
- H09344550 PDFDocumento6 pagineH09344550 PDFkavyaNessuna valutazione finora
- Arduino PWM MotorDocumento50 pagineArduino PWM MotorMohammed Benlamlih100% (7)
- Advanced Control System Lab PDFDocumento15 pagineAdvanced Control System Lab PDFarpitg2208Nessuna valutazione finora
- 02 - 02 Basics of AC Drives Part 2Documento16 pagine02 - 02 Basics of AC Drives Part 2anshu4u06Nessuna valutazione finora
- AC To DC Now and FutureDocumento40 pagineAC To DC Now and FutureTanachai TadsanawiwatNessuna valutazione finora
- Direct Torque Control of Induction MotorDocumento33 pagineDirect Torque Control of Induction MotorMaheshNessuna valutazione finora
- MDAHitachi VCS6000 Brochure1Documento8 pagineMDAHitachi VCS6000 Brochure1rhoney012Nessuna valutazione finora
- Actuators WDocumento15 pagineActuators Wsandeep5Nessuna valutazione finora
- DC Motor PI ControllerDocumento6 pagineDC Motor PI ControllerPooja MaathNessuna valutazione finora
- Understanding VFDDocumento46 pagineUnderstanding VFDZakariya100% (2)
- Tda1085c DDocumento12 pagineTda1085c DpamururamuNessuna valutazione finora
- DavidDocumento25 pagineDavidgtchsekharNessuna valutazione finora
- Exciter Basics BeDocumento35 pagineExciter Basics Bemauriceblanco1100% (4)
- Novel Method PMDC Motor Speed ControlDocumento15 pagineNovel Method PMDC Motor Speed ControlTravis WoodNessuna valutazione finora
- FTF Aut f0234Documento38 pagineFTF Aut f0234vishiwizardNessuna valutazione finora
- Chapter 9: Control Systems: Embedded Systems Design: A Unified Hardware/SoftwareDocumento43 pagineChapter 9: Control Systems: Embedded Systems Design: A Unified Hardware/SoftwareAnirudh ThiagarajanNessuna valutazione finora
- PMSM ControlDocumento35 paginePMSM Controldhaval2430Nessuna valutazione finora
- Prepared By: United Arab Emirates University College of Engineering Electrical Engineering DepartmentDocumento87 paginePrepared By: United Arab Emirates University College of Engineering Electrical Engineering DepartmentpadmajasivaNessuna valutazione finora
- Electrical MATLAB 2010 - 11Documento5 pagineElectrical MATLAB 2010 - 11ACTS TECHNO SOLUTIONSNessuna valutazione finora
- of PWM DC MotorDocumento21 pagineof PWM DC Motorabhay_131250% (4)
- Speed DC MotorDocumento35 pagineSpeed DC MotorDienar Adiose AljahezNessuna valutazione finora
- Speed Control of DC Motor Using Pid ControllerDocumento20 pagineSpeed Control of DC Motor Using Pid ControllerBUBUNNessuna valutazione finora
- DC Servo Motor ControlDocumento14 pagineDC Servo Motor ControlKundan NamadeNessuna valutazione finora
- Metoda Pengujian GeneratorDocumento52 pagineMetoda Pengujian Generatorsarwant_wantNessuna valutazione finora
- Commissioning of DAVRDocumento70 pagineCommissioning of DAVRPMG Bhuswal Project100% (1)
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkDa EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNessuna valutazione finora
- Digital Power Electronics and ApplicationsDa EverandDigital Power Electronics and ApplicationsValutazione: 3.5 su 5 stelle3.5/5 (3)
- 110 Waveform Generator Projects for the Home ConstructorDa Everand110 Waveform Generator Projects for the Home ConstructorValutazione: 4 su 5 stelle4/5 (1)
- Control of DC Motor Using Different Control StrategiesDa EverandControl of DC Motor Using Different Control StrategiesNessuna valutazione finora
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Da EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Valutazione: 2.5 su 5 stelle2.5/5 (3)
- SIRMDocumento9 pagineSIRMshailendra369Nessuna valutazione finora
- Allowable Nozzle LoadsDocumento6 pagineAllowable Nozzle Loads김동하Nessuna valutazione finora
- Mechanical Energy Storage: Created by Nick StroudDocumento24 pagineMechanical Energy Storage: Created by Nick StroudAli ShazanNessuna valutazione finora
- Salik Sa Mga Estudyante NG Hindi Wastong Pagsuot NG Uniporme NG Senior High School Sa Paaralang Ama Computer College Fairview CampusDocumento1 paginaSalik Sa Mga Estudyante NG Hindi Wastong Pagsuot NG Uniporme NG Senior High School Sa Paaralang Ama Computer College Fairview CampusIsrael ManansalaNessuna valutazione finora
- Data Sheet For T-8101.RevCDocumento5 pagineData Sheet For T-8101.RevCSuresh SjNessuna valutazione finora
- 06 Renr5908 08 01 All PDFDocumento108 pagine06 Renr5908 08 01 All PDFFrancisco Ospino Arrieta100% (2)
- Centiloquium of PtolemyDocumento37 pagineCentiloquium of PtolemyNatasa Karalic Koprivica100% (9)
- Foreign Affairs May June 2021 IssueDocumento216 pagineForeign Affairs May June 2021 IssueSohail BhattiNessuna valutazione finora
- Installing Go Language in UbuntuDocumento3 pagineInstalling Go Language in UbuntupanahbiruNessuna valutazione finora
- Causal Relationships WorksheetDocumento2 pagineCausal Relationships Worksheetledmabaya23Nessuna valutazione finora
- Edagogy of Anguages: VerviewDocumento54 pagineEdagogy of Anguages: VerviewMukesh MalviyaNessuna valutazione finora
- An1914 PDFDocumento56 pagineAn1914 PDFUpama Das100% (1)
- Jazz - Installing LED DRLsDocumento16 pagineJazz - Installing LED DRLsKrishnaNessuna valutazione finora
- Development and Application of "Green," Environmentally Friendly Refractory Materials For The High-Temperature Technologies in Iron and Steel ProductionDocumento6 pagineDevelopment and Application of "Green," Environmentally Friendly Refractory Materials For The High-Temperature Technologies in Iron and Steel ProductionJJNessuna valutazione finora
- HimediaDocumento2 pagineHimediaWiwit MarianaNessuna valutazione finora
- Unit 2 Talents: Phrasal Verbs: TurnDocumento5 pagineUnit 2 Talents: Phrasal Verbs: TurnwhysignupagainNessuna valutazione finora
- List of Marketing Metrics and KpisDocumento5 pagineList of Marketing Metrics and KpisThe KPI Examples ReviewNessuna valutazione finora
- Shaheed Suhrawardy Medical College HospitalDocumento3 pagineShaheed Suhrawardy Medical College HospitalDr. Mohammad Nazrul IslamNessuna valutazione finora
- Preparatory Newsletter No 3 2013Documento22 paginePreparatory Newsletter No 3 2013SJC AdminNessuna valutazione finora
- Defining The Market Research Problem & Developing An ApproachDocumento77 pagineDefining The Market Research Problem & Developing An ApproachSakshi Bhati I H21O41Nessuna valutazione finora
- Module 1 Learning PrinciplesDocumento2 pagineModule 1 Learning PrinciplesAngela Agonos100% (1)
- Programmable Logic Controllers: Basic Ladder Logic ProgrammingDocumento9 pagineProgrammable Logic Controllers: Basic Ladder Logic Programminganuradha19Nessuna valutazione finora
- Compuware DCRUM Intro 2012 Version 12.00Documento142 pagineCompuware DCRUM Intro 2012 Version 12.00JanNessuna valutazione finora
- User Manual ManoScanDocumento58 pagineUser Manual ManoScanNurul FathiaNessuna valutazione finora
- UBO - Lecture 07 - Implementing and Managing Organisational ChangeDocumento0 pagineUBO - Lecture 07 - Implementing and Managing Organisational ChangeShahNooraniITNessuna valutazione finora
- Omran WalidDocumento196 pagineOmran WalidDébora AmougouNessuna valutazione finora
- Chapter - 01 Geography The Earth in The Solar SystemDocumento10 pagineChapter - 01 Geography The Earth in The Solar SystemKarsin ManochaNessuna valutazione finora
- PMP Exam Questions and Answers PDFDocumento12 paginePMP Exam Questions and Answers PDFAshwin Raghav SankarNessuna valutazione finora
- A. Erfurth, P. Hoff. Mad Scenes in Early 19th-Century Opera PDFDocumento4 pagineA. Erfurth, P. Hoff. Mad Scenes in Early 19th-Century Opera PDFbiarrodNessuna valutazione finora
- Delay Codes1 3Documento10 pagineDelay Codes1 3AhmedNessuna valutazione finora