Potrebbero piacerti anche
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Impact of A JetDocumento14 pagineImpact of A JetKamarul Yusri100% (4)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
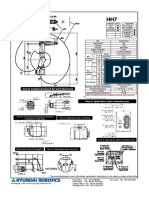
- Hh7 CatalogDocumento1 paginaHh7 Catalogjitender kumarNessuna valutazione finora
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Heat exchanger specification sheetDocumento2 pagineHeat exchanger specification sheetDycka Anugerah PuryantoroNessuna valutazione finora
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (894)
- Gauge TheoryDocumento15 pagineGauge TheoryLillyOpenMindNessuna valutazione finora
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Cswip 3.1 Difficul - Multichoice QuesDocumento11 pagineCswip 3.1 Difficul - Multichoice QuesLuan Nguyen0% (1)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- 978 1 4419 5754 2 PDFDocumento458 pagine978 1 4419 5754 2 PDFLUIS ISAAC LEON PARONessuna valutazione finora
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Mod 2 QuestionsDocumento49 pagineMod 2 Questionscyder100% (1)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- AkzoNobel SC CatalogDocumento41 pagineAkzoNobel SC CatalogVB JazminNessuna valutazione finora
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (587)
- Question Bank: Ee 1403 - Design of Electrical ApparatusDocumento11 pagineQuestion Bank: Ee 1403 - Design of Electrical ApparatussuriyasureshNessuna valutazione finora
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (265)
- ESO Annual Report 2016Documento126 pagineESO Annual Report 2016European Southern ObservatoryNessuna valutazione finora
- Sci7 wk10Documento7 pagineSci7 wk10Giovanni QuevedoNessuna valutazione finora
- Temperature effects on semiconductor speed and reliabilityDocumento20 pagineTemperature effects on semiconductor speed and reliabilityohenri100Nessuna valutazione finora
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Response Spectrum Analysis Using Femap and NX NastranDocumento40 pagineResponse Spectrum Analysis Using Femap and NX NastranGana C Rover100% (1)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- Greek LettersDocumento15 pagineGreek LettersPrasad DvssrNessuna valutazione finora
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Modul 7 MatrikDocumento10 pagineModul 7 MatrikAida Nur FadhilahNessuna valutazione finora
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- SF6 Circuit Breakers AdvantagesDocumento4 pagineSF6 Circuit Breakers Advantagessekhar_ntpcNessuna valutazione finora
- Esc201: Introducton To Electronics: FiltersDocumento31 pagineEsc201: Introducton To Electronics: Filtersash jayNessuna valutazione finora
- Arihant 41 Years MathsDocumento625 pagineArihant 41 Years MathsBhavani Vuppuloju100% (1)
- Calculations For IB ChemistryDocumento16 pagineCalculations For IB Chemistryanthor100% (3)
- Commercial Softener Specifications and Flow RatesDocumento1 paginaCommercial Softener Specifications and Flow Ratesrhusseinpos4765Nessuna valutazione finora
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Experiment 4: Protein Assay SpectrophotometryDocumento9 pagineExperiment 4: Protein Assay SpectrophotometryShadia HeyariNessuna valutazione finora
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2219)
- Syllabus For Written Test at IIT KanpurDocumento2 pagineSyllabus For Written Test at IIT KanpurNikhil WaniNessuna valutazione finora
- HCPE-MMP-0023 Unit Conversion SheetDocumento2 pagineHCPE-MMP-0023 Unit Conversion SheetRAJIV_332693187Nessuna valutazione finora
- IrDocumento13 pagineIrumesh123patilNessuna valutazione finora
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- 1 s2.0 S0921452617305768 MainDocumento5 pagine1 s2.0 S0921452617305768 MainpovNessuna valutazione finora
- 14 04 08 Referenslista Turbo (SE En)Documento11 pagine14 04 08 Referenslista Turbo (SE En)mersiumNessuna valutazione finora
- Selected Topics in Structronic and Mechatronic Systems (Stability, Vibration and Control of Systems, Series B, 3)Documento457 pagineSelected Topics in Structronic and Mechatronic Systems (Stability, Vibration and Control of Systems, Series B, 3)Devang SNessuna valutazione finora
- Using Displacement As Level MeasurementDocumento11 pagineUsing Displacement As Level MeasurementAlessio ScarabelliNessuna valutazione finora
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (119)
- Important Concepts For General Science UPSC IAS PrelimsDocumento4 pagineImportant Concepts For General Science UPSC IAS Prelimshim123verNessuna valutazione finora
- Performance of emulsion explosives containing glass micro-balloonsDocumento7 paginePerformance of emulsion explosives containing glass micro-balloonsOscar PamosNessuna valutazione finora
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)