Potrebbero piacerti anche
- B20024s S00 COVER SHEET-S00Documento1 paginaB20024s S00 COVER SHEET-S00Joel Koma EmesangeNessuna valutazione finora
- BA 07 BLD Sect-A07Documento1 paginaBA 07 BLD Sect-A07Joel Koma EmesangeNessuna valutazione finora
- B20024s S01 Structural Notes-S01Documento1 paginaB20024s S01 Structural Notes-S01Joel Koma EmesangeNessuna valutazione finora
- Ats SHPDWG 201215 SD 02Documento1 paginaAts SHPDWG 201215 SD 02Joel Koma EmesangeNessuna valutazione finora
- Telue Engineers LTD: Proposed Maprik District HospitalDocumento1 paginaTelue Engineers LTD: Proposed Maprik District HospitalJoel Koma EmesangeNessuna valutazione finora
- B20024s S04 Details Foot & Slab-S04Documento1 paginaB20024s S04 Details Foot & Slab-S04Joel Koma EmesangeNessuna valutazione finora
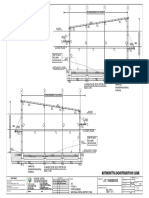
- B20024s S07 Elev - Sect Build-S07Documento1 paginaB20024s S07 Elev - Sect Build-S07Joel Koma EmesangeNessuna valutazione finora
- A-104 - Huli Wig DrawingsDocumento1 paginaA-104 - Huli Wig DrawingsJoel Koma EmesangeNessuna valutazione finora
- Crown Plaza Hotel Microbrewery: Structural Drawing ScheduleDocumento13 pagineCrown Plaza Hotel Microbrewery: Structural Drawing ScheduleJoel Koma EmesangeNessuna valutazione finora
- C-20021 s07 - Proposed Brewery Roof Layout Plan-S07 - PrintDocumento1 paginaC-20021 s07 - Proposed Brewery Roof Layout Plan-S07 - PrintJoel Koma EmesangeNessuna valutazione finora
- Approved dwgs-01Documento14 pagineApproved dwgs-01Joel Koma EmesangeNessuna valutazione finora
- Developed Design: C1 C1 C1 C1 C1Documento1 paginaDeveloped Design: C1 C1 C1 C1 C1Joel Koma EmesangeNessuna valutazione finora
- Work Log - Week (8-12 Feb 2021)Documento3 pagineWork Log - Week (8-12 Feb 2021)Joel Koma EmesangeNessuna valutazione finora
- A201 - Floor Plan - Pathology Blood Bank A&e Maternal ChildDocumento1 paginaA201 - Floor Plan - Pathology Blood Bank A&e Maternal ChildJoel Koma EmesangeNessuna valutazione finora
- Ats SHPDWG 201215 SD 02Documento1 paginaAts SHPDWG 201215 SD 02Joel Koma EmesangeNessuna valutazione finora
- Official tutorials - CSiBridge installation and exampleDocumento7 pagineOfficial tutorials - CSiBridge installation and exampleN TNessuna valutazione finora
- Telue Engineers LTD: Proposed Maprik District HospitalDocumento1 paginaTelue Engineers LTD: Proposed Maprik District HospitalJoel Koma EmesangeNessuna valutazione finora
- AWC DES413 1 ShearWallExamples 1hr 140822Documento66 pagineAWC DES413 1 ShearWallExamples 1hr 140822Joel Koma EmesangeNessuna valutazione finora
- NA Topic 2 Bridge Design Seminar Colombo March 2016Documento152 pagineNA Topic 2 Bridge Design Seminar Colombo March 2016alex abrhaNessuna valutazione finora
- Work Log - Week (8-12 Feb 2021)Documento3 pagineWork Log - Week (8-12 Feb 2021)Joel Koma EmesangeNessuna valutazione finora
- Work Log - Week (1-5 Feb 2021)Documento3 pagineWork Log - Week (1-5 Feb 2021)Joel Koma EmesangeNessuna valutazione finora
- RE: CTSL Taurama Commercial Centre - RFT AAL 010121 Addendum 1Documento1 paginaRE: CTSL Taurama Commercial Centre - RFT AAL 010121 Addendum 1Joel Koma EmesangeNessuna valutazione finora
- Work Log - Week (22-26 Feb 2021)Documento3 pagineWork Log - Week (22-26 Feb 2021)Joel Koma EmesangeNessuna valutazione finora
- Design of A Prestressed Concrete Bridge and Analysis by CsibridgeDocumento15 pagineDesign of A Prestressed Concrete Bridge and Analysis by CsibridgeJoel Koma EmesangeNessuna valutazione finora
- R1-Work Log - Week (1-5 Feb 2021)Documento3 pagineR1-Work Log - Week (1-5 Feb 2021)Joel Koma EmesangeNessuna valutazione finora
- BDP 4Documento56 pagineBDP 4yenebeb tarikuNessuna valutazione finora
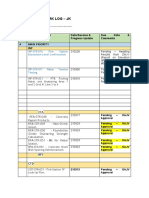
- JK & HJ - Structural WORK LOGDocumento2 pagineJK & HJ - Structural WORK LOGJoel Koma EmesangeNessuna valutazione finora
- 3W-700 - Furniture LayoutDocumento1 pagina3W-700 - Furniture LayoutJoel Koma EmesangeNessuna valutazione finora
- LRFD Design Example PDFDocumento648 pagineLRFD Design Example PDFchinna_kanna5098100% (1)
- 3W-302.Consolidated Plan - Power & Data-CommsDocumento1 pagina3W-302.Consolidated Plan - Power & Data-CommsJoel Koma EmesangeNessuna valutazione finora
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (119)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Prince of PersiaDocumento144 paginePrince of PersiaseminarulNessuna valutazione finora
- Ricoh Is330dc ScannerDocumento60 pagineRicoh Is330dc ScannerJoey SmitheyNessuna valutazione finora
- 8-Bit MTP Micro-ControllerDocumento33 pagine8-Bit MTP Micro-ControllerSoumya Jyoti DanNessuna valutazione finora
- Mazda Bulletin No 01-037-08Documento5 pagineMazda Bulletin No 01-037-08prvi72Nessuna valutazione finora
- Total - War.Shogun.2.Fall - Of.the - Samurai. (2012) - SKIDROW (Page 1 of 4) - View TopicDocumento22 pagineTotal - War.Shogun.2.Fall - Of.the - Samurai. (2012) - SKIDROW (Page 1 of 4) - View TopicPepe80mNessuna valutazione finora
- Prisma Plus System GDocumento256 paginePrisma Plus System GTalos SorinNessuna valutazione finora
- ActionPlan HA Update 2015 V1.3Documento19 pagineActionPlan HA Update 2015 V1.3Shailesh RansingNessuna valutazione finora
- Railway issues addendum to steel bridge fabrication specificationDocumento41 pagineRailway issues addendum to steel bridge fabrication specificationvishal agrawal100% (1)
- Os Unit 2Documento60 pagineOs Unit 2Anish Dubey SultanpurNessuna valutazione finora
- MC123 GuideDocumento51 pagineMC123 GuidecdhollowhornNessuna valutazione finora
- DL004U-P Cirrus User ManualDocumento38 pagineDL004U-P Cirrus User ManualJuan Pablo HernándezNessuna valutazione finora
- Instalacion Cabezal HP A3Documento20 pagineInstalacion Cabezal HP A3colorestec28Nessuna valutazione finora
- Jelly BlastDocumento37 pagineJelly Blastrahul7989Nessuna valutazione finora
- Customize XFCE (THE EASY WAY)Documento13 pagineCustomize XFCE (THE EASY WAY)Ikmal SaidNessuna valutazione finora
- C BMJ 0082Documento1 paginaC BMJ 0082José RodríguezNessuna valutazione finora
- CNG Dispenser Service Manual v.1.1.5Documento129 pagineCNG Dispenser Service Manual v.1.1.5ankeshkatoch100% (1)
- Haitian Jupiter SeriesDocumento6 pagineHaitian Jupiter SeriesClaudio Rafael Deola SadaNessuna valutazione finora
- (Embedded Systems) Djones Lettnin, Markus Winterholer (Eds.) - Embedded Software Verification and Debugging-Springer (2017)Documento220 pagine(Embedded Systems) Djones Lettnin, Markus Winterholer (Eds.) - Embedded Software Verification and Debugging-Springer (2017)Pedro EversonNessuna valutazione finora
- Socket Pin Count Cpu Families Frequency (MHZ) Bus Frequency (MHZ)Documento3 pagineSocket Pin Count Cpu Families Frequency (MHZ) Bus Frequency (MHZ)ArjunKrNessuna valutazione finora
- Ic 695 Etm 001Documento3 pagineIc 695 Etm 001mongersonNessuna valutazione finora
- Diaphragm Valve D100Documento10 pagineDiaphragm Valve D100Mohd Khairi Mohd Norzian0% (1)
- ST Joseph'S College of EngineeirngDocumento16 pagineST Joseph'S College of EngineeirngVignesshwar VenkatachalamNessuna valutazione finora
- Unknown platform Ren'Py logDocumento2 pagineUnknown platform Ren'Py logGonzalo GordilloNessuna valutazione finora
- Cameron Subsea Systems GlossaryDocumento29 pagineCameron Subsea Systems GlossaryEnio Rafael Gutiérrez RuzNessuna valutazione finora
- The tIDE Java IDE Manual: Draft Version, Not Yet CompleteDocumento45 pagineThe tIDE Java IDE Manual: Draft Version, Not Yet CompleteMario Ayil HuicabNessuna valutazione finora
- C QuestionDocumento41 pagineC QuestionrajeevsahaniNessuna valutazione finora
- Character Conversion APIsDocumento14 pagineCharacter Conversion APIsrachmat99Nessuna valutazione finora
- 31-SAMSS-010 - Nov. 12, 2013Documento9 pagine31-SAMSS-010 - Nov. 12, 2013Lainhatanh100% (1)
- NXI5 WINInstlDocumento85 pagineNXI5 WINInstljaiguNessuna valutazione finora
- Zelio Control RM17JC00MWDocumento3 pagineZelio Control RM17JC00MWoutlander2008Nessuna valutazione finora