Potrebbero piacerti anche
- Finite Element MethodDocumento9 pagineFinite Element MethodSriram Anil Kumar GandhamNessuna valutazione finora
- Layout Oriented Synthesis of High Performance Analog CircuitsDocumento5 pagineLayout Oriented Synthesis of High Performance Analog CircuitsOana MitaNessuna valutazione finora
- 15 PDFDocumento28 pagine15 PDFwearplayNessuna valutazione finora
- A Verification Procedure For MSC/NASTRAN Finite Element ModelsDocumento22 pagineA Verification Procedure For MSC/NASTRAN Finite Element ModelsTomaspockNessuna valutazione finora
- Some Recent Advances For Practical Finite Element AnalysisDocumento11 pagineSome Recent Advances For Practical Finite Element AnalysismariomatoNessuna valutazione finora
- Discretization ErrorDocumento11 pagineDiscretization Errorசுஜித் குமார்Nessuna valutazione finora
- A Verification Procedure For MSC/NASTRAN Finite Element ModelsDocumento22 pagineA Verification Procedure For MSC/NASTRAN Finite Element Modelsdumi_userNessuna valutazione finora
- Mesh Discretization Error and Criteria For Accuracy of Finite Element SolutionsDocumento12 pagineMesh Discretization Error and Criteria For Accuracy of Finite Element Solutionsglassw380Nessuna valutazione finora
- Stopping Criteria For A Constrained Single-Objective Particle Swarm Optimization AlgorithmDocumento10 pagineStopping Criteria For A Constrained Single-Objective Particle Swarm Optimization AlgorithmLittle PrincessNessuna valutazione finora
- Ansys ExercisesDocumento20 pagineAnsys Exerciseskpvraj100% (1)
- Analog Circuit Optimization System Based On Hybrid Evolutionary AlgorithmsDocumento12 pagineAnalog Circuit Optimization System Based On Hybrid Evolutionary AlgorithmsashishmanyanNessuna valutazione finora
- Vahidnia, Arash Ledwich, Gerard Ghosh, Arindam Palmer, EdwardDocumento8 pagineVahidnia, Arash Ledwich, Gerard Ghosh, Arindam Palmer, EdwardMarioTresićNessuna valutazione finora
- Feature Selection For A Real-World Learning TaskDocumento12 pagineFeature Selection For A Real-World Learning TaskkolldirNessuna valutazione finora
- Fixtures - FEADocumento5 pagineFixtures - FEAMohammedRafficNessuna valutazione finora
- Global Optimization MethodDocumento32 pagineGlobal Optimization MethodHeather WinNessuna valutazione finora
- Afmc16 Dfo CFD PDFDocumento4 pagineAfmc16 Dfo CFD PDFdatam38Nessuna valutazione finora
- Improvement in Power Transformer Intelligent Dissolved Gas Analysis MethodDocumento4 pagineImprovement in Power Transformer Intelligent Dissolved Gas Analysis MethodsueleninhaNessuna valutazione finora
- Optimization of Machining Parameters Using Fuzzy Based Principal Component Analysis During Dry Turning Operation of Inconel 625 - A Hybrid ApproachDocumento9 pagineOptimization of Machining Parameters Using Fuzzy Based Principal Component Analysis During Dry Turning Operation of Inconel 625 - A Hybrid Approachsuneel kumar rathoreNessuna valutazione finora
- Adaptive Reproducing Kernel Particle Method Using Gradient Indicator For Elasto-Plastic DeformationDocumento13 pagineAdaptive Reproducing Kernel Particle Method Using Gradient Indicator For Elasto-Plastic DeformationDesmondd MondNessuna valutazione finora
- 1801 07114 PDFDocumento39 pagine1801 07114 PDFhamidrezaee008Nessuna valutazione finora
- Workpackage 4: Optimization: Distributed Modelling ApproachDocumento4 pagineWorkpackage 4: Optimization: Distributed Modelling ApproachMelissa MillerNessuna valutazione finora
- AIAA20025539 StanderDocumento10 pagineAIAA20025539 Standerger5555kingNessuna valutazione finora
- Optimum Coordination of Overcurrent Relays Using SADE AlgorithmDocumento10 pagineOptimum Coordination of Overcurrent Relays Using SADE AlgorithmJamile_P_NNessuna valutazione finora
- Design of Experiments Via Taguchi Methods - Orthogonal Arrays - ControlsWikiDocumento11 pagineDesign of Experiments Via Taguchi Methods - Orthogonal Arrays - ControlsWikiRachel HillNessuna valutazione finora
- Optimized Extraction of MOS Model ParametersDocumento6 pagineOptimized Extraction of MOS Model ParametersTâm NguyễnNessuna valutazione finora
- Taguchi APPDocumento14 pagineTaguchi APPAmey VidvansNessuna valutazione finora
- Integrating Theory, Experiments, and FEA To Solve Challenging Nonlinear Mechanics ProblemsDocumento17 pagineIntegrating Theory, Experiments, and FEA To Solve Challenging Nonlinear Mechanics ProblemsBodieTechNessuna valutazione finora
- Stope Boundary Optimization Using A 3D Approximate Hybrid AlgorithmDocumento14 pagineStope Boundary Optimization Using A 3D Approximate Hybrid AlgorithmKENNY BRANDON MAWODZWANessuna valutazione finora
- J Fen Um AccuracyDocumento9 pagineJ Fen Um Accuracyhamed12077Nessuna valutazione finora
- Chapter - 1: Another Problem During The Time of Optimizing Any Objective FunctionsDocumento14 pagineChapter - 1: Another Problem During The Time of Optimizing Any Objective FunctionsHossein HosseinNessuna valutazione finora
- Optimization in Design of Electric MachinesDocumento10 pagineOptimization in Design of Electric MachinesRituvic PandeyNessuna valutazione finora
- Of Final BookDocumento197 pagineOf Final BookSachinNessuna valutazione finora
- Industrial Applications Using Neural NetworksDocumento11 pagineIndustrial Applications Using Neural Networksapi-26172869Nessuna valutazione finora
- Comparison and SelectionDocumento10 pagineComparison and SelectioncruzreyeslauraNessuna valutazione finora
- Straightness and Flatness Evaluation Using Data Envelopment AnalysisDocumento10 pagineStraightness and Flatness Evaluation Using Data Envelopment Analysisakjeevanantham79Nessuna valutazione finora
- Stewart 2004Documento6 pagineStewart 2004Hanan MouchtakiriNessuna valutazione finora
- Nassaj, Lienig Et Al. 2009 - A New Methodology For Constraint-DrivenDocumento4 pagineNassaj, Lienig Et Al. 2009 - A New Methodology For Constraint-DrivensimNessuna valutazione finora
- Comparing Efficiency of Integration Methods For Cloth SimulationDocumento8 pagineComparing Efficiency of Integration Methods For Cloth SimulationCyrille LamasséNessuna valutazione finora
- Exploiting A Workstation Network For Automatic Generation of Test Patterns For Digital CircuitsDocumento17 pagineExploiting A Workstation Network For Automatic Generation of Test Patterns For Digital CircuitsDhwal MehtaNessuna valutazione finora
- An Optimization Framework To Computer-Aided DesignDocumento7 pagineAn Optimization Framework To Computer-Aided DesignYaqoob AliNessuna valutazione finora
- Design of Experiments Via Taguchi Methods Orthogonal ArraysDocumento21 pagineDesign of Experiments Via Taguchi Methods Orthogonal ArraysRohan ViswanathNessuna valutazione finora
- Final Project ReportDocumento18 pagineFinal Project ReportjstpallavNessuna valutazione finora
- Electricity Load Forecasting - IntelligentDocumento10 pagineElectricity Load Forecasting - IntelligentkarthikbolluNessuna valutazione finora
- 1979 Efficient Solution of Design Problems Using A Sequential-Modular Flowsheeting ProgrammeDocumento7 pagine1979 Efficient Solution of Design Problems Using A Sequential-Modular Flowsheeting Programmelvjiaze12Nessuna valutazione finora
- Pillay Application GeneticDocumento10 paginePillay Application GenetickfaliNessuna valutazione finora
- Multi-Objective Optimal Placement of Recloser and Sectionalizer in Electricity Distribution FeedersDocumento4 pagineMulti-Objective Optimal Placement of Recloser and Sectionalizer in Electricity Distribution Feedersabera alemayehuNessuna valutazione finora
- Validation and Updating Ansys Model Using Expt Modal DataDocumento10 pagineValidation and Updating Ansys Model Using Expt Modal DataKiran KolluruNessuna valutazione finora
- FEA SummaryDocumento4 pagineFEA Summarysharma_ankur_jecNessuna valutazione finora
- Introduction To ANSYS7842679769Documento21 pagineIntroduction To ANSYS7842679769Julie RochaNessuna valutazione finora
- Zeina L Zadeh 2019Documento4 pagineZeina L Zadeh 2019Gustavo FloresNessuna valutazione finora
- Solving Ode by Ann PDFDocumento14 pagineSolving Ode by Ann PDFDeep SinghaNessuna valutazione finora
- PolyTop PDFDocumento29 paginePolyTop PDFahmed_shaheebNessuna valutazione finora
- Sari WESIC2003 PaperDocumento8 pagineSari WESIC2003 PaperSalehNessuna valutazione finora
- 101 Ways Extract Modal Parameters Which Is One Me PDFDocumento13 pagine101 Ways Extract Modal Parameters Which Is One Me PDFValentino de GeorgeNessuna valutazione finora
- Integer Optimization and its Computation in Emergency ManagementDa EverandInteger Optimization and its Computation in Emergency ManagementNessuna valutazione finora
- Affine Arithmetic-Based Methods for Uncertain Power System AnalysisDa EverandAffine Arithmetic-Based Methods for Uncertain Power System AnalysisNessuna valutazione finora
- Apdl ExampleDocumento7 pagineApdl ExampleypcadNessuna valutazione finora
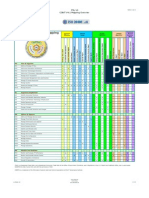
- Ansys Capabilities ChartDocumento8 pagineAnsys Capabilities ChartypcadNessuna valutazione finora
- Surface Solution On Solid FaceDocumento9 pagineSurface Solution On Solid FaceypcadNessuna valutazione finora
- Mechanical Intro 14.5 L10 ThermalDocumento27 pagineMechanical Intro 14.5 L10 ThermalypcadNessuna valutazione finora
- Customize Legend MechanicalDocumento12 pagineCustomize Legend Mechanicalypcad0% (1)
- Offshore-Combin39 Vs SplinterDocumento12 pagineOffshore-Combin39 Vs SplinterypcadNessuna valutazione finora
- Ansys UpfDocumento57 pagineAnsys Upfypcad100% (1)
- Ansys UpfDocumento57 pagineAnsys Upfypcad100% (1)
- Civil Combining Ansys CivilfemDocumento24 pagineCivil Combining Ansys CivilfemypcadNessuna valutazione finora
- Ansys UpfDocumento57 pagineAnsys Upfypcad100% (1)
- Fatigue DemoDocumento17 pagineFatigue DemoypcadNessuna valutazione finora
- Fatigue ANSYSDocumento22 pagineFatigue ANSYSapi-3717939100% (2)
- Custom Is Ing Mechanical in WorkbenchxDocumento1 paginaCustom Is Ing Mechanical in WorkbenchxypcadNessuna valutazione finora
- How To Install WordPressDocumento11 pagineHow To Install WordPressmetaouiNessuna valutazione finora
- Application of Graph Theory in Web 2Documento9 pagineApplication of Graph Theory in Web 2Maria Benedetta VitalesNessuna valutazione finora
- Programming LanguagesDocumento27 pagineProgramming LanguagesziggatronNessuna valutazione finora
- Time & Work - Part-03Documento9 pagineTime & Work - Part-03shuhal AhmedNessuna valutazione finora
- 01 Crash CourseDocumento23 pagine01 Crash CourseahmetakdoganNessuna valutazione finora
- Brosur Dan Spek BT-350Documento3 pagineBrosur Dan Spek BT-350dr novi kurniasariNessuna valutazione finora
- Itil Cobit Mapping TemplateDocumento6 pagineItil Cobit Mapping Templategobits100% (3)
- Manual GLDDocumento126 pagineManual GLDIna Rodica PricăNessuna valutazione finora
- Cmlexch PDFDocumento7.952 pagineCmlexch PDFtumbledoor100% (1)
- AREVA Directional Over Current Relay MiCOM P12x en TechDataDocumento28 pagineAREVA Directional Over Current Relay MiCOM P12x en TechDatadeccanelecNessuna valutazione finora
- Management Presentation 1Documento10 pagineManagement Presentation 1clizardoNessuna valutazione finora
- Sample Test Paper Duet PDFDocumento3 pagineSample Test Paper Duet PDFhasnain ghazalaNessuna valutazione finora
- Shankar - Fundood Data - G To LDocumento16 pagineShankar - Fundood Data - G To LBuvanesh RajagopalNessuna valutazione finora
- TC TRK 2p Brochure Eng 210x297mm Rev7 17072021 Lrs Single PagesDocumento8 pagineTC TRK 2p Brochure Eng 210x297mm Rev7 17072021 Lrs Single Pagesneophantom00Nessuna valutazione finora
- AVI Eehal: E-Mail: Mobile: 312.451.8811Documento5 pagineAVI Eehal: E-Mail: Mobile: 312.451.8811CHAVAMOHITHBALAJI SchoolNessuna valutazione finora
- UserManual Coding VCM v1.4.Documento51 pagineUserManual Coding VCM v1.4.ImSW1100% (2)
- Normalization Vs DeNormalizationDocumento26 pagineNormalization Vs DeNormalizationamolgavaliNessuna valutazione finora
- Ximble Biometric Information PolicyDocumento3 pagineXimble Biometric Information PolicychapungutNessuna valutazione finora
- PRO II 8.0 Component and Thermophysical Properties - Reference ManualDocumento207 paginePRO II 8.0 Component and Thermophysical Properties - Reference ManualLuis Carlos Ayllón EscobarNessuna valutazione finora
- HP Service Manager Tailoring and CustomizationDocumento5 pagineHP Service Manager Tailoring and Customizationfrom_jimNessuna valutazione finora
- Installation Guide For Windows: Section 1 - Create An Account at Udaan Translation Web InterfaceDocumento15 pagineInstallation Guide For Windows: Section 1 - Create An Account at Udaan Translation Web Interfacekamarajme2006Nessuna valutazione finora
- Linux SchedulingDocumento28 pagineLinux SchedulingKoushik AkkinapalliNessuna valutazione finora
- The Hanging Tree - Jennifer LawrenceDocumento6 pagineThe Hanging Tree - Jennifer LawrenceChan Sek Yeong100% (1)
- New Brunswick Enterprise Architecture ManualDocumento108 pagineNew Brunswick Enterprise Architecture ManualMichael DavidsonNessuna valutazione finora
- Installed Base ErrorsDocumento5 pagineInstalled Base ErrorsManmohan KulkarniNessuna valutazione finora
- Introduction To Plant SimulationlDocumento16 pagineIntroduction To Plant SimulationlLeon SakiNessuna valutazione finora
- Real Python PDFDocumento209 pagineReal Python PDFIvanov Ilya100% (1)
- COBOL Basics Questions and Answers - SanfoundryDocumento2 pagineCOBOL Basics Questions and Answers - SanfoundryHarshu PatilNessuna valutazione finora
- Surface Water Modeling System: A Comprehensive Software Environment For Creating Hydrodynamic ModelsDocumento11 pagineSurface Water Modeling System: A Comprehensive Software Environment For Creating Hydrodynamic ModelsMajhic AryonoNessuna valutazione finora
- Text Processing (Complete)Documento100 pagineText Processing (Complete)WeiYewHuongNessuna valutazione finora