Potrebbero piacerti anche
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- 6 Energy MeterDocumento4 pagine6 Energy Meternirmal_inboxNessuna valutazione finora
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Time Domain Electromagnetic MethodsDocumento16 pagineTime Domain Electromagnetic MethodsAydin Nejati100% (1)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Spring Damping On Matlab PlatformDocumento3 pagineSpring Damping On Matlab PlatformShaharior AnikNessuna valutazione finora
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- 68PCCMINUTESDocumento110 pagine68PCCMINUTESSanjoy PanditNessuna valutazione finora
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- HKCCCU Logos Academy Physics Worksheet - Chapter 2 Electric Circuit 2.1 Electric CurrentDocumento24 pagineHKCCCU Logos Academy Physics Worksheet - Chapter 2 Electric Circuit 2.1 Electric CurrentHiHiNessuna valutazione finora
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Topic 3 Electric Charge: 1. Electric Charge Read The Passage and Answer The Questions!Documento6 pagineTopic 3 Electric Charge: 1. Electric Charge Read The Passage and Answer The Questions!FarhnsNessuna valutazione finora
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Half-Wave Rectifier Feeding A DC MotorDocumento4 pagineHalf-Wave Rectifier Feeding A DC Motorhamza abdo mohamoudNessuna valutazione finora
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- V3.sia1 - .25.analysis and Design Updation of Aerial Monocable Ropeway Conveyors For Eliminating Recurring Failures and DowntimesDocumento12 pagineV3.sia1 - .25.analysis and Design Updation of Aerial Monocable Ropeway Conveyors For Eliminating Recurring Failures and DowntimesTarunNessuna valutazione finora
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- Safety GroundingDocumento183 pagineSafety GroundingBrij Mishra100% (1)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- Physics Course ContentsDocumento84 paginePhysics Course ContentsAmbreen Khan100% (1)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Shell Momentum Balance 1Documento16 pagineShell Momentum Balance 1Kevwe Macaulay -GbogidiNessuna valutazione finora
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Diode Clamper Circuit. by - Engr - Irshad Rahim Memon - PPT Video Online DownloadDocumento9 pagineDiode Clamper Circuit. by - Engr - Irshad Rahim Memon - PPT Video Online DownloadAlejandro100% (1)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Dept. of Physics, Bangabasi College Kolkata, NPTEL Local ChapterDocumento12 pagineDept. of Physics, Bangabasi College Kolkata, NPTEL Local ChapterAnik GhoshNessuna valutazione finora
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- Comparison of High Capacity SVC and STATCOM in Real Power GridDocumento5 pagineComparison of High Capacity SVC and STATCOM in Real Power GridAzaldo SalvadorNessuna valutazione finora
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- Thyristor Switch ApplicationsDocumento7 pagineThyristor Switch ApplicationsPathum SudasingheNessuna valutazione finora
- Power Transformer Protection Relaying (Overcurrent, Restricted Earth Fault & Differential) - EEPDocumento30 paginePower Transformer Protection Relaying (Overcurrent, Restricted Earth Fault & Differential) - EEPDurgeshkumar RajputNessuna valutazione finora
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Determination of Positive, Negative and Zero Sequence Impedances of Three Phase TransformerDocumento3 pagineDetermination of Positive, Negative and Zero Sequence Impedances of Three Phase Transformerarjuna4306100% (1)
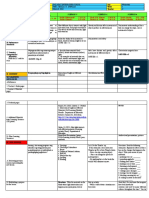
- DLL Q3 Week 4 Day 4Documento11 pagineDLL Q3 Week 4 Day 4Cecilia Guevarra DumlaoNessuna valutazione finora
- Comparison of Simulation Tools Atp Emtp and Matlab Simulink For Time Domain Power System Transient StudiesDocumento14 pagineComparison of Simulation Tools Atp Emtp and Matlab Simulink For Time Domain Power System Transient StudiesramonenriqueNessuna valutazione finora
- Patch Antenna Design at 2.4GHz FRQDocumento17 paginePatch Antenna Design at 2.4GHz FRQImtiaz Ali100% (1)
- Piezoelectric or Strain Gauge Based Force TransducersDocumento5 paginePiezoelectric or Strain Gauge Based Force TransducersAydinNessuna valutazione finora
- Main Plnat Wind LoadDocumento780 pagineMain Plnat Wind LoadArmie May RicoNessuna valutazione finora
- 1 Lightning Protection of Wind Turbine Blades PDFDocumento7 pagine1 Lightning Protection of Wind Turbine Blades PDFMICHEL RAJNessuna valutazione finora
- PHYSICS MechanicsDocumento329 paginePHYSICS MechanicsPeng GengNessuna valutazione finora
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Insight Physics ClassesDocumento19 pagineInsight Physics ClassesMOHAMMED ASIF100% (2)
- CH 09Documento139 pagineCH 09이잉Nessuna valutazione finora
- Physics NotesDocumento13 paginePhysics Noteswaheedlakho100% (2)
- User Manual T200A EN V3.05Documento56 pagineUser Manual T200A EN V3.05Sunil LimayeNessuna valutazione finora
- Three Phase Electric Power SystemDocumento5 pagineThree Phase Electric Power SystemJarah GutierrezNessuna valutazione finora
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Under The Guidance Of: Prof. Ajoya Ku Pradhan HOD Dept. of Electrical EngineeringDocumento27 pagineUnder The Guidance Of: Prof. Ajoya Ku Pradhan HOD Dept. of Electrical Engineeringishfaq222100% (1)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)