Potrebbero piacerti anche
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5795)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- PMP QDocumento59 paginePMP QJackNessuna valutazione finora
- 14 Ships Service GeneratorsDocumento32 pagine14 Ships Service Generatorsdeep4u2009100% (1)
- Calculus PDF Notes 156pages59Documento13 pagineCalculus PDF Notes 156pages59Pardeep Singh100% (1)
- Conditional Chart PDFDocumento1 paginaConditional Chart PDFeduardo menesesNessuna valutazione finora
- Teoria de Control IIDocumento11 pagineTeoria de Control IIRicardo ZapataNessuna valutazione finora
- Advanced Statistics Course SyllabusDocumento7 pagineAdvanced Statistics Course SyllabusKristina PabloNessuna valutazione finora
- Assignment PDFDocumento2 pagineAssignment PDFMoazzam HussainNessuna valutazione finora
- Chap 6 Hydrograph 1415-IDocumento122 pagineChap 6 Hydrograph 1415-IkakmanNessuna valutazione finora
- Power SeriesDocumento2 paginePower SeriesAbhi DebNessuna valutazione finora
- Pub Quantum-Physics PDFDocumento338 paginePub Quantum-Physics PDFRaj JanaNessuna valutazione finora
- Analytical Solution To Transient Heat Conduction in Polar Coordinates With Multiple Layers in Radial DirectionDocumento13 pagineAnalytical Solution To Transient Heat Conduction in Polar Coordinates With Multiple Layers in Radial DirectionGabriel SaavedraNessuna valutazione finora
- 2139 12021 1 PB PDFDocumento9 pagine2139 12021 1 PB PDFSantosh Kumar PandeyNessuna valutazione finora
- Tut-sheet-2-PHL120-13 With Final Answers PDFDocumento2 pagineTut-sheet-2-PHL120-13 With Final Answers PDFjgrgpt33Nessuna valutazione finora
- BUOYANCY & FLOTATION - METACENTRIC HEIGHT ReportDocumento8 pagineBUOYANCY & FLOTATION - METACENTRIC HEIGHT Reportميسرة94% (18)
- Modelacion Calida Agua Parte 1Documento14 pagineModelacion Calida Agua Parte 1Gisell AguilarNessuna valutazione finora
- Exercise1 BDocumento2 pagineExercise1 Bapi-3737025Nessuna valutazione finora
- 3 - ANN Part One PDFDocumento30 pagine3 - ANN Part One PDFIsmael EspinozaNessuna valutazione finora
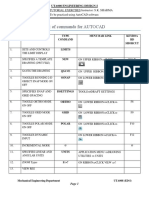
- List of Commands For Autocad: Cad Lab Tutorial Exercises Instructor: S.K. Sharma To Be Practiced Using Autocad SoftwareDocumento15 pagineList of Commands For Autocad: Cad Lab Tutorial Exercises Instructor: S.K. Sharma To Be Practiced Using Autocad SoftwareShakeelNessuna valutazione finora
- Maths PDFDocumento60 pagineMaths PDFLoh Chee WeiNessuna valutazione finora
- Notes On Absolutely Continuous Functions of Several VariablesDocumento16 pagineNotes On Absolutely Continuous Functions of Several VariablesSufyanNessuna valutazione finora
- New Microsoft Office Word DocumentDocumento7 pagineNew Microsoft Office Word DocumentMangisetty SairamNessuna valutazione finora
- Concrete Mix Design Is MethodDocumento29 pagineConcrete Mix Design Is MethodChirag TanavalaNessuna valutazione finora
- MATH101 Lecture1Documento21 pagineMATH101 Lecture1Cristhian Aldana YarlequeNessuna valutazione finora
- L.04 Flexible Road Pavement Structural Condition Benchmark Methodology IncorporatingDocumento15 pagineL.04 Flexible Road Pavement Structural Condition Benchmark Methodology IncorporatingAgustina ManurungNessuna valutazione finora
- House Price Estimates Based On Machine Learning AlgorithmDocumento5 pagineHouse Price Estimates Based On Machine Learning AlgorithmEditor IJTSRDNessuna valutazione finora
- Application of Conformal Mapping For ElectromagneticDocumento21 pagineApplication of Conformal Mapping For ElectromagneticBrown MountainNessuna valutazione finora
- Niterói, Volgograd and Trans-Tokyo Bay Steel Bridge Decks Abraham - Sanchez - Corriols - 2de2Documento135 pagineNiterói, Volgograd and Trans-Tokyo Bay Steel Bridge Decks Abraham - Sanchez - Corriols - 2de2Miguel PerezNessuna valutazione finora
- Flint Water Crisis Hypothesis Test: Dan LulsegedDocumento12 pagineFlint Water Crisis Hypothesis Test: Dan LulsegedDtwaNessuna valutazione finora
- Aea Cookbook Econometrics Module 1Documento117 pagineAea Cookbook Econometrics Module 1shadayenpNessuna valutazione finora
- N6 Control Systems August 2018Documento14 pagineN6 Control Systems August 2018lechutnmNessuna valutazione finora