Potrebbero piacerti anche
- Planar Linkage Synthesis: A modern CAD based approachDa EverandPlanar Linkage Synthesis: A modern CAD based approachNessuna valutazione finora
- Kinematics and MechanismsDocumento92 pagineKinematics and MechanismsRichard PerezNessuna valutazione finora
- The Optimal Design of Three Degree-of-Freedom Parallel Mechanisms For Machining ApplicationsDocumento9 pagineThe Optimal Design of Three Degree-of-Freedom Parallel Mechanisms For Machining ApplicationsBignaturalNessuna valutazione finora
- Advanced Theory of Constraint and Motion Analysis for Robot MechanismsDa EverandAdvanced Theory of Constraint and Motion Analysis for Robot MechanismsNessuna valutazione finora
- Preared By: Dr. J. N. KERAITA: Emg 2404: Mechanics of Machines IiiDocumento9 paginePreared By: Dr. J. N. KERAITA: Emg 2404: Mechanics of Machines IiiMuthoka VincentNessuna valutazione finora
- Robot Manipulators: Modeling, Performance Analysis and ControlDa EverandRobot Manipulators: Modeling, Performance Analysis and ControlNessuna valutazione finora
- Mechanism and Machine Theory: Wen-Hsiang HsiehDocumento23 pagineMechanism and Machine Theory: Wen-Hsiang HsiehStefan IlicNessuna valutazione finora
- The Optimal Design of Three Degree-of-Freedom Parallel Mechanisms For Machining ApplicationsDocumento6 pagineThe Optimal Design of Three Degree-of-Freedom Parallel Mechanisms For Machining ApplicationsmiguelrlzNessuna valutazione finora
- Multiple Models Approach in Automation: Takagi-Sugeno Fuzzy SystemsDa EverandMultiple Models Approach in Automation: Takagi-Sugeno Fuzzy SystemsNessuna valutazione finora
- Rotor-Dynamics Analysis Process: Polar Moment of Inertia About The Axis of SpinDocumento16 pagineRotor-Dynamics Analysis Process: Polar Moment of Inertia About The Axis of SpinpavanpppNessuna valutazione finora
- Performance-Based Gear Metrology: Kinematic - Transmission - Error Computation and DiagnosisDa EverandPerformance-Based Gear Metrology: Kinematic - Transmission - Error Computation and DiagnosisNessuna valutazione finora
- Tool RetrivelDocumento42 pagineTool RetrivelganeshNessuna valutazione finora
- Three Axis Rotary PlatformDocumento6 pagineThree Axis Rotary PlatformSudhanwa KulkarniNessuna valutazione finora
- 1 s2.0 S0094114X01000672 MainDocumento21 pagine1 s2.0 S0094114X01000672 Main2pijduasgNessuna valutazione finora
- Selection of Smooth Motion Profile For A Tube Locator Module of An Inspection DeviceDocumento15 pagineSelection of Smooth Motion Profile For A Tube Locator Module of An Inspection DeviceIAES International Journal of Robotics and AutomationNessuna valutazione finora
- Crank and Slotted Lever Quick Return (Rev2)Documento9 pagineCrank and Slotted Lever Quick Return (Rev2)Vipin YadavNessuna valutazione finora
- Eco-Design Approach For The Tripode Type Coupling: Transilvania University of Brasov, RomaniaDocumento10 pagineEco-Design Approach For The Tripode Type Coupling: Transilvania University of Brasov, RomaniatikydorNessuna valutazione finora
- Ac 2011-838: Machine Design Lab: Using Automotive Trans-Mission Examples To Reinforce Understanding of Gear Train AnalysisDocumento21 pagineAc 2011-838: Machine Design Lab: Using Automotive Trans-Mission Examples To Reinforce Understanding of Gear Train AnalysisNguyenNessuna valutazione finora
- Design and Analysis of A Compliant Parallel Pan-Tilt Platform 2015Documento12 pagineDesign and Analysis of A Compliant Parallel Pan-Tilt Platform 2015newkid2202Nessuna valutazione finora
- Design and Analysis of Globoidal Cam Index DriveDocumento6 pagineDesign and Analysis of Globoidal Cam Index DriveijsretNessuna valutazione finora
- A Practical Approach To The Optimization of Gear Trains With Spur GearsDocumento16 pagineA Practical Approach To The Optimization of Gear Trains With Spur Gearsanmol6237Nessuna valutazione finora
- Pimpri Chinchwad Polytechnic, Nigdi: Chapter 01-Inversions of MechanismDocumento43 paginePimpri Chinchwad Polytechnic, Nigdi: Chapter 01-Inversions of MechanismNarendra ChavdaNessuna valutazione finora
- Machine Design Lab Using Automotive Transmission Examples To Reinforce Understanding of Gear Train AnalysisDocumento21 pagineMachine Design Lab Using Automotive Transmission Examples To Reinforce Understanding of Gear Train AnalysisDIEGO ORIGINALES MONTOYANessuna valutazione finora
- EXP 03 - Kinematics of Cam MechanismsDocumento9 pagineEXP 03 - Kinematics of Cam Mechanismsdtl.nnmNessuna valutazione finora
- Novel Compliant Wiper MechanismDocumento10 pagineNovel Compliant Wiper MechanismMarko DjekicNessuna valutazione finora
- Chapter 2 HandoutDocumento12 pagineChapter 2 HandoutRobel Metiku100% (1)
- Planar LinkagesDocumento8 paginePlanar LinkagesAlbert ArominNessuna valutazione finora
- Kinematics of Machinery 2 Marks All 5 UnitsDocumento18 pagineKinematics of Machinery 2 Marks All 5 UnitsvelavansuNessuna valutazione finora
- Stiffness Metrics For Design of 3-RRR Flexible Manipulator: K.V.Varalakshmi, Dr.J.SrinivasDocumento7 pagineStiffness Metrics For Design of 3-RRR Flexible Manipulator: K.V.Varalakshmi, Dr.J.SrinivasIJMERNessuna valutazione finora
- Mechanical Behaviour Simulation PDFDocumento27 pagineMechanical Behaviour Simulation PDFanildhakeNessuna valutazione finora
- Kinematics of Machinery Anna University Question Papers CompiledDocumento77 pagineKinematics of Machinery Anna University Question Papers CompiledNatesha SundharanNessuna valutazione finora
- 2010 Iros Reza SGPDocumento6 pagine2010 Iros Reza SGPTanNguyễnNessuna valutazione finora
- Kinematic Analysis of The Roller FolloweDocumento2 pagineKinematic Analysis of The Roller Followedtl.nnmNessuna valutazione finora
- Kinematic Analysis and Synthesis of An AdjustableDocumento19 pagineKinematic Analysis and Synthesis of An AdjustablephilipbatistatosNessuna valutazione finora
- Kom Unit 1Documento5 pagineKom Unit 1M.ThirunavukkarasuNessuna valutazione finora
- Mechanism and Machine Theory: Jong-Won Kim, Taewon Seo, Jongwon KimDocumento17 pagineMechanism and Machine Theory: Jong-Won Kim, Taewon Seo, Jongwon KimCesar HernandezNessuna valutazione finora
- Ijsrdv1i9084 PDFDocumento2 pagineIjsrdv1i9084 PDFKanaga VaratharajanNessuna valutazione finora
- Chapter 5. Planar LinkagesDocumento8 pagineChapter 5. Planar LinkagesBasudeb ShitNessuna valutazione finora
- Technical Paper For Students and Young Engineers: - Fisita World Automotive Congress, Barcelona 2004Documento15 pagineTechnical Paper For Students and Young Engineers: - Fisita World Automotive Congress, Barcelona 2004rike.spNessuna valutazione finora
- Vibration ProjectDocumento11 pagineVibration ProjectEileen WongNessuna valutazione finora
- Kinematics OF Machinery: Adithya Institute of TechnologyDocumento34 pagineKinematics OF Machinery: Adithya Institute of TechnologybalajimetturNessuna valutazione finora
- Analytical Kinematics Models and Special Geometries of A Class of 4-DOF Parallel MechanismsDocumento10 pagineAnalytical Kinematics Models and Special Geometries of A Class of 4-DOF Parallel Mechanismsvinoo13Nessuna valutazione finora
- Bai - 2010 - Optimum Design of Spherical Parallel ManipulatorsDocumento12 pagineBai - 2010 - Optimum Design of Spherical Parallel ManipulatorsDurgesh Haribhau SalunkheNessuna valutazione finora
- 4 Bar MechanismsDocumento49 pagine4 Bar MechanismsFrank SandorNessuna valutazione finora
- Jurnal V-Belt Rafa Pradipta 9122015Documento8 pagineJurnal V-Belt Rafa Pradipta 9122015afdhdan winataNessuna valutazione finora
- Asme JMDDocumento6 pagineAsme JMDJunaid YNessuna valutazione finora
- Literature Review: Four-Bar Linkage or Simply A 4-Bar or Four-Bar Is The Simplest Movable Linkage. ItDocumento16 pagineLiterature Review: Four-Bar Linkage or Simply A 4-Bar or Four-Bar Is The Simplest Movable Linkage. It17-3E3 DEEPU MISHRA Mr.Nessuna valutazione finora
- Analysis of Rigid Dynamic of A Spatial Slider-Crank Mechanism With Spherical Clearance Joints Using ANSYS Software Huynh Ngoc Thai, SHYH-CHOUR HUANGDocumento5 pagineAnalysis of Rigid Dynamic of A Spatial Slider-Crank Mechanism With Spherical Clearance Joints Using ANSYS Software Huynh Ngoc Thai, SHYH-CHOUR HUANGThaiHuynhNgocNessuna valutazione finora
- Gear Train PDFDocumento10 pagineGear Train PDFABHIJITNessuna valutazione finora
- CVT Dynamics-Theory and ExperimentsDocumento21 pagineCVT Dynamics-Theory and ExperimentsSanjay HansdahNessuna valutazione finora
- New Friction Mechanical TransmissionDocumento5 pagineNew Friction Mechanical TransmissionInternational Journal of Engineering Inventions (IJEI)Nessuna valutazione finora
- The Design of Parallel Combination For Cam Mechanism: SciencesDocumento7 pagineThe Design of Parallel Combination For Cam Mechanism: SciencesKunal SharmaNessuna valutazione finora
- Ling 2016Documento12 pagineLing 2016Ho Nhat LinhNessuna valutazione finora
- Theoretical and Experimental Efficiency Analysis of Multi-Degrees-of-Freedom Epicyclic Gear TrainsDocumento21 pagineTheoretical and Experimental Efficiency Analysis of Multi-Degrees-of-Freedom Epicyclic Gear TrainsAmin ShafanezhadNessuna valutazione finora
- Advances in The Modelling of Motorcycle Dynamics: Multibody System Dynamics October 2004Documento34 pagineAdvances in The Modelling of Motorcycle Dynamics: Multibody System Dynamics October 2004Tyrone BerryNessuna valutazione finora
- Unit 1 - Basics of MechanismsDocumento9 pagineUnit 1 - Basics of MechanismsNagendrababu VasaNessuna valutazione finora
- Kom Notes555Documento9 pagineKom Notes555Nagendrababu VasaNessuna valutazione finora
- Optimization of Superelevation Runoff Model For Cycling TracksDocumento7 pagineOptimization of Superelevation Runoff Model For Cycling TracksLuis Alejandro MedinaNessuna valutazione finora
- Infinique Structured Cabling Installation ChecklistDocumento2 pagineInfinique Structured Cabling Installation Checklistroot75% (4)
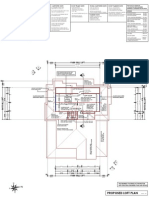
- LoftplanDocumento1 paginaLoftplanapi-228799117Nessuna valutazione finora
- Mov BiffiDocumento177 pagineMov BiffiSKNessuna valutazione finora
- Ram Structural SystemDocumento234 pagineRam Structural Systemlavy100% (1)
- L3 - Hardening Soil Models in PlaxisDocumento33 pagineL3 - Hardening Soil Models in PlaxisOng Tai BoonNessuna valutazione finora
- Motorized Hydraulic PressDocumento4 pagineMotorized Hydraulic PressDhiraj Shinde100% (2)
- Precio Por Escala Dosyu Efectiva HasDocumento4 paginePrecio Por Escala Dosyu Efectiva HasAliss SanchezNessuna valutazione finora
- Codex 2017 enDocumento713 pagineCodex 2017 enJIgnacio123Nessuna valutazione finora
- 350W AmplifierDocumento5 pagine350W AmplifiermoisesNessuna valutazione finora
- Distance Measuring EquipmentDocumento12 pagineDistance Measuring Equipmentमेनसन लाखेमरूNessuna valutazione finora
- Benq mp510 Level1Documento212 pagineBenq mp510 Level1Juan Duarte Lopez100% (1)
- IQ RF MappingDocumento14 pagineIQ RF Mappingsatcom_77Nessuna valutazione finora
- 3 Types of Lasers and ApplicationsDocumento2 pagine3 Types of Lasers and ApplicationsHemlata AgarwalNessuna valutazione finora
- T Turboexpander Alternative FuelingDocumento24 pagineT Turboexpander Alternative FuelingJose Luis Rodriguez LópezNessuna valutazione finora
- How Does A Blueprint Work?Documento5 pagineHow Does A Blueprint Work?Eumieh Jane AlfonsoNessuna valutazione finora
- Shell Spirax S6 Txme: Performance, Features & BenefitsDocumento2 pagineShell Spirax S6 Txme: Performance, Features & BenefitsAbdelhadi HoussinNessuna valutazione finora
- ReactionsDocumento30 pagineReactionskaloibestNessuna valutazione finora
- Critical Care Systems Test Equipment For Repairs and PMS in The USA and CanadaDocumento6 pagineCritical Care Systems Test Equipment For Repairs and PMS in The USA and CanadaMedsystem atNessuna valutazione finora
- Valve PagesDocumento5 pagineValve PagesJoyal ThomasNessuna valutazione finora
- 130195mitsubishi ManualDocumento16 pagine130195mitsubishi ManualAbdul Noor KhanNessuna valutazione finora
- Module 1: Introduction To Operating System: Need For An OSDocumento18 pagineModule 1: Introduction To Operating System: Need For An OSshikha2012Nessuna valutazione finora
- SCELDocumento46 pagineSCELzacklawsNessuna valutazione finora
- Potable Water Tank Calculation PDFDocumento37 paginePotable Water Tank Calculation PDFboysitumeangNessuna valutazione finora
- CHEG320 Electrochemistry LecturesDocumento114 pagineCHEG320 Electrochemistry LecturesqalanisNessuna valutazione finora
- AASHTO GeoTechnical Design of PileDocumento5 pagineAASHTO GeoTechnical Design of PiletrannguyenvietNessuna valutazione finora
- Design and Evaluation of Inflatable Wings For UavsDocumento290 pagineDesign and Evaluation of Inflatable Wings For UavsmegustalazorraNessuna valutazione finora
- Qdoc - Tips Bs en Iso 19285 2017 Non Destructive Testing of WeDocumento30 pagineQdoc - Tips Bs en Iso 19285 2017 Non Destructive Testing of WeDave CheungNessuna valutazione finora
- Gopakumar 2002Documento9 pagineGopakumar 2002mihaela_myky14Nessuna valutazione finora
- CDMA APPLICATION FOR Child Name Inclusion-Before 1 Year PDFDocumento2 pagineCDMA APPLICATION FOR Child Name Inclusion-Before 1 Year PDFAnonymous C0pl6hNessuna valutazione finora
- Autovue IntegrationDocumento4 pagineAutovue IntegrationmansrallyNessuna valutazione finora
- Scary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldDa EverandScary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldValutazione: 4.5 su 5 stelle4.5/5 (55)
- Generative AI: The Insights You Need from Harvard Business ReviewDa EverandGenerative AI: The Insights You Need from Harvard Business ReviewValutazione: 4.5 su 5 stelle4.5/5 (2)
- Cyber War: The Next Threat to National Security and What to Do About ItDa EverandCyber War: The Next Threat to National Security and What to Do About ItValutazione: 3.5 su 5 stelle3.5/5 (66)
- Defensive Cyber Mastery: Expert Strategies for Unbeatable Personal and Business SecurityDa EverandDefensive Cyber Mastery: Expert Strategies for Unbeatable Personal and Business SecurityValutazione: 5 su 5 stelle5/5 (1)
- Algorithms to Live By: The Computer Science of Human DecisionsDa EverandAlgorithms to Live By: The Computer Science of Human DecisionsValutazione: 4.5 su 5 stelle4.5/5 (722)
- The Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldDa EverandThe Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldValutazione: 4.5 su 5 stelle4.5/5 (107)
- Chaos Monkeys: Obscene Fortune and Random Failure in Silicon ValleyDa EverandChaos Monkeys: Obscene Fortune and Random Failure in Silicon ValleyValutazione: 3.5 su 5 stelle3.5/5 (111)
- Chip War: The Quest to Dominate the World's Most Critical TechnologyDa EverandChip War: The Quest to Dominate the World's Most Critical TechnologyValutazione: 4.5 su 5 stelle4.5/5 (228)
- Solutions Architect's Handbook: Kick-start your career as a solutions architect by learning architecture design principles and strategiesDa EverandSolutions Architect's Handbook: Kick-start your career as a solutions architect by learning architecture design principles and strategiesNessuna valutazione finora
- Python for Beginners: A Crash Course Guide to Learn Python in 1 WeekDa EverandPython for Beginners: A Crash Course Guide to Learn Python in 1 WeekValutazione: 4.5 su 5 stelle4.5/5 (7)
- 100M Offers Made Easy: Create Your Own Irresistible Offers by Turning ChatGPT into Alex HormoziDa Everand100M Offers Made Easy: Create Your Own Irresistible Offers by Turning ChatGPT into Alex HormoziNessuna valutazione finora
- ChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessDa EverandChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessNessuna valutazione finora
- ChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveDa EverandChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveNessuna valutazione finora
- Four Battlegrounds: Power in the Age of Artificial IntelligenceDa EverandFour Battlegrounds: Power in the Age of Artificial IntelligenceValutazione: 5 su 5 stelle5/5 (5)
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindDa EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindNessuna valutazione finora
- Clean Code: A Handbook of Agile Software CraftsmanshipDa EverandClean Code: A Handbook of Agile Software CraftsmanshipValutazione: 5 su 5 stelle5/5 (13)
- Excel Essentials: A Step-by-Step Guide with Pictures for Absolute Beginners to Master the Basics and Start Using Excel with ConfidenceDa EverandExcel Essentials: A Step-by-Step Guide with Pictures for Absolute Beginners to Master the Basics and Start Using Excel with ConfidenceNessuna valutazione finora
- Learn Python Programming for Beginners: Best Step-by-Step Guide for Coding with Python, Great for Kids and Adults. Includes Practical Exercises on Data Analysis, Machine Learning and More.Da EverandLearn Python Programming for Beginners: Best Step-by-Step Guide for Coding with Python, Great for Kids and Adults. Includes Practical Exercises on Data Analysis, Machine Learning and More.Valutazione: 5 su 5 stelle5/5 (34)
- Dark Data: Why What You Don’t Know MattersDa EverandDark Data: Why What You Don’t Know MattersValutazione: 4.5 su 5 stelle4.5/5 (3)
- Hacks To Crush Plc Program Fast & Efficiently Everytime... : Coding, Simulating & Testing Programmable Logic Controller With ExamplesDa EverandHacks To Crush Plc Program Fast & Efficiently Everytime... : Coding, Simulating & Testing Programmable Logic Controller With ExamplesValutazione: 5 su 5 stelle5/5 (1)
- Excel 2023 for Beginners: A Complete Quick Reference Guide from Beginner to Advanced with Simple Tips and Tricks to Master All Essential Fundamentals, Formulas, Functions, Charts, Tools, & ShortcutsDa EverandExcel 2023 for Beginners: A Complete Quick Reference Guide from Beginner to Advanced with Simple Tips and Tricks to Master All Essential Fundamentals, Formulas, Functions, Charts, Tools, & ShortcutsNessuna valutazione finora
- Artificial Intelligence: The Insights You Need from Harvard Business ReviewDa EverandArtificial Intelligence: The Insights You Need from Harvard Business ReviewValutazione: 4.5 su 5 stelle4.5/5 (104)
- Working with AI: Real Stories of Human-Machine Collaboration (Management on the Cutting Edge)Da EverandWorking with AI: Real Stories of Human-Machine Collaboration (Management on the Cutting Edge)Valutazione: 5 su 5 stelle5/5 (5)