Potrebbero piacerti anche
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- ISOL 532 Week 1aDocumento24 pagineISOL 532 Week 1aMajid Shaik0% (1)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Digital Signal Processing Chapter 3Documento4 pagineDigital Signal Processing Chapter 3Majid ShaikNessuna valutazione finora
- Multi-Objective Regulations On TransportationDocumento39 pagineMulti-Objective Regulations On TransportationMajid ShaikNessuna valutazione finora
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Digital Integrated Circuits - A Design Perspective (2nd Ed) TocDocumento10 pagineDigital Integrated Circuits - A Design Perspective (2nd Ed) Tocemilko33% (3)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Huaming WSL WDL Technical Data 1Documento10 pagineHuaming WSL WDL Technical Data 1ClarkxNessuna valutazione finora
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Bonga Main Gate Revised El - 010321Documento5 pagineBonga Main Gate Revised El - 010321RedietNessuna valutazione finora
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- Antennas: Constantine A. BalanisDocumento45 pagineAntennas: Constantine A. BalanisAzeem BhattiNessuna valutazione finora
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- OIM GB 1190056002 Cnt0Documento360 pagineOIM GB 1190056002 Cnt0Sandi Junior SihotangNessuna valutazione finora
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- American University of Sharjah Department of Electrical EngineeringDocumento5 pagineAmerican University of Sharjah Department of Electrical EngineeringNajmul Puda PappadamNessuna valutazione finora
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- TP03AL220S03LSW 2W 85-265VAC Input 3.3VDC OutputDocumento3 pagineTP03AL220S03LSW 2W 85-265VAC Input 3.3VDC OutputtoppowerNessuna valutazione finora
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- FPGA Implementation of CORDIC-Based QRD-RLS AlgorithmDocumento5 pagineFPGA Implementation of CORDIC-Based QRD-RLS Algorithmsappal73asNessuna valutazione finora
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
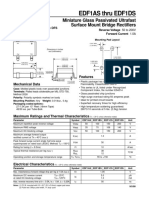
- EDF1AS Thru EDF1DS: Miniature Glass Passivated Ultrafast Surface Mount Bridge RectifiersDocumento2 pagineEDF1AS Thru EDF1DS: Miniature Glass Passivated Ultrafast Surface Mount Bridge RectifiersCarlosNessuna valutazione finora
- LV Cable TestsDocumento18 pagineLV Cable TestsEbrahim ArzaniNessuna valutazione finora
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- 08-3464 Walker 7080Documento2 pagine08-3464 Walker 7080serjulica2000Nessuna valutazione finora
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- IBM VGA XGA Technical Reference Manual May92Documento425 pagineIBM VGA XGA Technical Reference Manual May92kgrhoadsNessuna valutazione finora
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Assignment 2Documento4 pagineAssignment 2api-272504728Nessuna valutazione finora
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- EHVACDocumento60 pagineEHVACanjanivedNessuna valutazione finora
- Siemens-7SJ62-dir OcDocumento4 pagineSiemens-7SJ62-dir OcAbo Abdullah MohamedNessuna valutazione finora
- Physics Paper 2 SF 026/2 PSPSM Semester 2 Session 2013/2014Documento11 paginePhysics Paper 2 SF 026/2 PSPSM Semester 2 Session 2013/2014Fun Fun Tik TokNessuna valutazione finora
- Attitude Indicator Model Number: Gs Maintenance ManualDocumento51 pagineAttitude Indicator Model Number: Gs Maintenance ManualbrightprojectrussiaNessuna valutazione finora
- Emcp II Sensor CheckDocumento14 pagineEmcp II Sensor CheckAbdul Khaliq100% (1)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Miniature FusesDocumento88 pagineMiniature FusesEliasNessuna valutazione finora
- Cat 4054 UkDocumento92 pagineCat 4054 UkClarence SmithNessuna valutazione finora
- LMR 200 DatasheetDocumento4 pagineLMR 200 DatasheetAMNessuna valutazione finora
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Ficha 7GSC - 8GSAC v2 PDFDocumento4 pagineFicha 7GSC - 8GSAC v2 PDFLorenzo Balaguer HuguetNessuna valutazione finora
- Electrical Principles Peter Phillips Full ChapterDocumento51 pagineElectrical Principles Peter Phillips Full Chaptertami.cobb436100% (5)
- RETROESCAVADORA Cat 446B SIS ELECTRICODocumento2 pagineRETROESCAVADORA Cat 446B SIS ELECTRICOEDY75% (4)
- C6140-0060 - Control Cabinet Industrial PC: VariantsDocumento2 pagineC6140-0060 - Control Cabinet Industrial PC: Variantsdarinel88Nessuna valutazione finora
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (120)
- Ceraphant T PTC31, PTP31, PTP35: Technical InformationDocumento24 pagineCeraphant T PTC31, PTP31, PTP35: Technical InformationRenato Jose Genari LiraNessuna valutazione finora
- Reference Letter TemplateDocumento2 pagineReference Letter TemplateAnant Pratap Srivastava100% (3)
- VU Meter Circuit Stereo Mono 20 LED With PCBDocumento9 pagineVU Meter Circuit Stereo Mono 20 LED With PCBferdinandNessuna valutazione finora
- Chapter 4 Laplace TransformDocumento54 pagineChapter 4 Laplace Transformkhaled jNessuna valutazione finora
- Instruction Manual: General-Purpose InverterDocumento74 pagineInstruction Manual: General-Purpose Inverteranhthong3k100% (2)
- Protection Instrument TransformersDocumento21 pagineProtection Instrument TransformersSyed Muzammil AliNessuna valutazione finora
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)