Potrebbero piacerti anche
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Stereo Magazine Issue 02Documento66 pagineStereo Magazine Issue 02LipsticNessuna valutazione finora
- FM Approvals CN 1613Documento0 pagineFM Approvals CN 1613Marcelo PeixotoNessuna valutazione finora
- Centrifugal PumpDocumento56 pagineCentrifugal Pumpchandraa2208Nessuna valutazione finora
- Engineering Data Analysis (Mod2)Documento7 pagineEngineering Data Analysis (Mod2)Mark Peru100% (1)
- 12 Month Cash Flow StatementDocumento1 pagina12 Month Cash Flow StatementiPakistan100% (2)
- SEPARATION THEORY - From Basic Separation To ALCAP SystemDocumento42 pagineSEPARATION THEORY - From Basic Separation To ALCAP SystemmgbouneNessuna valutazione finora
- IEC Systems Manual - SCRDocumento102 pagineIEC Systems Manual - SCRgabriel100% (3)
- LiftingLugStress Rev 1.5Documento17 pagineLiftingLugStress Rev 1.5mohdshakir bahariNessuna valutazione finora
- SAES-A-102 Ambient Air Quality and Source Emissions StandardsDocumento21 pagineSAES-A-102 Ambient Air Quality and Source Emissions StandardsFlorante NoblezaNessuna valutazione finora
- Bliss of Nature 4Documento1 paginaBliss of Nature 4नवीन कुमारNessuna valutazione finora
- Perfect Pitch ChecklistDocumento2 paginePerfect Pitch Checklistनवीन कुमारNessuna valutazione finora
- Bliss of Nature 4Documento1 paginaBliss of Nature 4नवीन कुमारNessuna valutazione finora
- Get FundDocumento1 paginaGet Fundनवीन कुमारNessuna valutazione finora
- How To Get FundDocumento1 paginaHow To Get Fundनवीन कुमारNessuna valutazione finora
- IndiaDocumento1 paginaIndiaनवीन कुमारNessuna valutazione finora
- IndiaDocumento1 paginaIndiaनवीन कुमारNessuna valutazione finora
- Marketing ChecklistDocumento2 pagineMarketing Checklistनवीन कुमारNessuna valutazione finora
- Use Case DocumentDocumento6 pagineUse Case Documentvikram122Nessuna valutazione finora
- Customer Service ChecklistDocumento2 pagineCustomer Service Checklistनवीन कुमारNessuna valutazione finora
- 15 IT StrategyDocumento13 pagine15 IT StrategyJeimi HerreraNessuna valutazione finora
- Financial Plan ChecklistDocumento2 pagineFinancial Plan Checklistनवीन कुमारNessuna valutazione finora
- Twelve Month Sales Forecast: Enter Your Company Name HereDocumento1 paginaTwelve Month Sales Forecast: Enter Your Company Name HereMatei AdelinNessuna valutazione finora
- Cocktail Cost CalculatorDocumento15 pagineCocktail Cost Calculatorनवीन कुमारNessuna valutazione finora
- ChecklistDocumento5 pagineChecklistनवीन कुमारNessuna valutazione finora
- QuoteDocumento1 paginaQuoteनवीन कुमारNessuna valutazione finora
- ChecklistDocumento5 pagineChecklistनवीन कुमारNessuna valutazione finora
- Vibes Cafe Vibes Cafe Vibes CaféDocumento2 pagineVibes Cafe Vibes Cafe Vibes Caféनवीन कुमारNessuna valutazione finora
- SpinesDocumento17 pagineSpinesनवीन कुमारNessuna valutazione finora
- Image ProcessingDocumento11 pagineImage ProcessingCahill GaryNessuna valutazione finora
- Fundamentals of Image ProcessingDocumento72 pagineFundamentals of Image Processingkirthi83Nessuna valutazione finora
- Image ProcessingDocumento11 pagineImage ProcessingCahill GaryNessuna valutazione finora
- Mysql Database CreationDocumento1 paginaMysql Database Creationनवीन कुमारNessuna valutazione finora
- Matlab Primer: Lecture 02a Optical Sciences 330 Physical Optics II William J. Dallas January 12, 2005Documento25 pagineMatlab Primer: Lecture 02a Optical Sciences 330 Physical Optics II William J. Dallas January 12, 2005नवीन कुमारNessuna valutazione finora
- Create HTML Document MacDocumento1 paginaCreate HTML Document Macनवीन कुमारNessuna valutazione finora
- E-Payment System On E-Commerce in India: Karamjeet Kaur, Dr. Ashutosh PathakDocumento9 pagineE-Payment System On E-Commerce in India: Karamjeet Kaur, Dr. Ashutosh Pathakdharshinee1961Nessuna valutazione finora
- f77 f55 User ManualDocumento36 paginef77 f55 User ManualGabi GabrielNessuna valutazione finora
- Harmonic Oscillations of Spiral Springs - Springs Linked in Parallel and SeriesDocumento5 pagineHarmonic Oscillations of Spiral Springs - Springs Linked in Parallel and SeriesJose GalvanNessuna valutazione finora
- Medium Voltage MZDocumento86 pagineMedium Voltage MZsujiNessuna valutazione finora
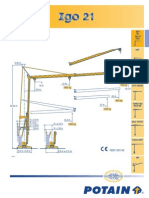
- Potain Igo 21 PDFDocumento4 paginePotain Igo 21 PDFMarco CruzNessuna valutazione finora
- Assign 3Documento9 pagineAssign 3Yudha PP0% (1)
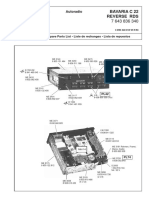
- Bavaria Reverse RdsDocumento15 pagineBavaria Reverse RdsDušan JovanovićNessuna valutazione finora
- Chapter 6 SlidesDocumento28 pagineChapter 6 Slidesshinde_jayesh2005Nessuna valutazione finora
- ORT ReportDocumento71 pagineORT ReportNaveen ChodagiriNessuna valutazione finora
- SG-05 Safety Guideline For Illumination at WorkplaceDocumento5 pagineSG-05 Safety Guideline For Illumination at WorkplacebsrchandruNessuna valutazione finora
- Slum FinalDocumento46 pagineSlum FinalSanghita Bhowmick83% (6)
- Excel 2010 Cheatsheet PDFDocumento2 pagineExcel 2010 Cheatsheet PDFVinith VimalNessuna valutazione finora
- Brain Controlled Car For Disabled Using Artificial IntelligenceDocumento17 pagineBrain Controlled Car For Disabled Using Artificial IntelligenceMdkhanzNessuna valutazione finora
- CND - Clinical Round ChecklistDocumento2 pagineCND - Clinical Round ChecklistMona Ismail AlsomaliNessuna valutazione finora
- MH16 Series ROOFTOP AC Manual REV 2013Documento19 pagineMH16 Series ROOFTOP AC Manual REV 2013caleb perezNessuna valutazione finora
- Catalogo CMCDocumento145 pagineCatalogo CMCalyboscanNessuna valutazione finora
- Lab 3 SST 4303Documento5 pagineLab 3 SST 4303Muazrul MangsorNessuna valutazione finora
- DW-143 - Leakage Factor As Per Calculation FormulaDocumento2 pagineDW-143 - Leakage Factor As Per Calculation Formulasandeep7426Nessuna valutazione finora
- Notice - Odd Sem End Semester Examinations 2022-23 - Phase 2 - Procedure - 020223Documento1 paginaNotice - Odd Sem End Semester Examinations 2022-23 - Phase 2 - Procedure - 020223pritamchandra007Nessuna valutazione finora
- AMICO InstallationManual PDFDocumento60 pagineAMICO InstallationManual PDFfernandoNessuna valutazione finora
- Dry ContactsDocumento2 pagineDry ContactsDiwakar MishraNessuna valutazione finora
- Uk Fat 2017Documento178 pagineUk Fat 2017Christopher J MillsNessuna valutazione finora