Potrebbero piacerti anche
- Automobile EngineeringDocumento12 pagineAutomobile EngineeringsayoojNessuna valutazione finora
- Abs TCS EbdDocumento15 pagineAbs TCS EbdNB Huy100% (1)
- Antilock Brake Systems (ABS)Documento30 pagineAntilock Brake Systems (ABS)pRAMOD g pATOLENessuna valutazione finora
- Electro Magnetic BrakingDocumento19 pagineElectro Magnetic BrakingCUBE Engineering SolutionsNessuna valutazione finora
- Anti Lock Braking System ABS of CarsDocumento14 pagineAnti Lock Braking System ABS of CarsMani PrakashNessuna valutazione finora
- 4341 Aev As 3Documento19 pagine4341 Aev As 33341 Onkar KaleNessuna valutazione finora
- Service HandoutDocumento59 pagineService HandoutTapas Banerjee100% (2)
- Electro Magnetic BrakeDocumento43 pagineElectro Magnetic Brakesamy_175Nessuna valutazione finora
- P3 SRAM Cell: A Technical StudyDocumento22 pagineP3 SRAM Cell: A Technical StudyAayush AgarwalNessuna valutazione finora
- Slip Ratio Control of Anti-Lock Braking System With Bang-Bang ControllerDocumento8 pagineSlip Ratio Control of Anti-Lock Braking System With Bang-Bang Controllerniveditha trNessuna valutazione finora
- Abs 3Documento2 pagineAbs 3ภูเก็ต เป็นเกาะNessuna valutazione finora
- Toyota ABS Braking SystemsDocumento23 pagineToyota ABS Braking SystemsTriqezz AntaresNessuna valutazione finora
- Design of Electronic Semi - Automatic Clutch For Manual Actuation of Clutch in A CarDocumento6 pagineDesign of Electronic Semi - Automatic Clutch For Manual Actuation of Clutch in A CarTamilarasanRpcg100% (2)
- Abuki Anti Lock Braking SystemDocumento20 pagineAbuki Anti Lock Braking SystemAbubaker MuzayinNessuna valutazione finora
- ATT Brakes - Example TextbookDocumento15 pagineATT Brakes - Example TextbookSooraj KrishnaNessuna valutazione finora
- Brake by Wire SystemsDocumento16 pagineBrake by Wire Systemsdevhx86% (7)
- Anti Brake SystemDocumento15 pagineAnti Brake SystemRenu ShindeNessuna valutazione finora
- Modeling and Development of Antilock Braking System Project ReportDocumento25 pagineModeling and Development of Antilock Braking System Project ReportSapna KumariNessuna valutazione finora
- ABS Seminar ReportDocumento27 pagineABS Seminar ReportPrem Shankar Singh29% (7)
- Automatic Braking System For Automobiles Using IR SensorDocumento4 pagineAutomatic Braking System For Automobiles Using IR SensorSourabh SharafNessuna valutazione finora
- Electro Magnetic Braking SystemDocumento45 pagineElectro Magnetic Braking Systemchutturu mukeshNessuna valutazione finora
- Measuring the effectiveness of ABS and EBD systems in improving vehicle stability and braking performanceDocumento5 pagineMeasuring the effectiveness of ABS and EBD systems in improving vehicle stability and braking performanceShivamNessuna valutazione finora
- Interlligent Braking SystemDocumento45 pagineInterlligent Braking Systemchutturu mukeshNessuna valutazione finora
- Anti Lock Brake System (Tata Motors Information)Documento16 pagineAnti Lock Brake System (Tata Motors Information)Tapas Banerjee100% (3)
- Finite Element Analysis of AUTO SuspensionDocumento7 pagineFinite Element Analysis of AUTO SuspensionVishnu ShanmugavelNessuna valutazione finora
- Anti-Lock Brake System (Abs)Documento19 pagineAnti-Lock Brake System (Abs)Ivan Catalin100% (1)
- Braking System: Prepared By:-Jagseer Singh Sukhpal Singh Kamaljeeet Singh Lalit Kumar Atish KumarDocumento23 pagineBraking System: Prepared By:-Jagseer Singh Sukhpal Singh Kamaljeeet Singh Lalit Kumar Atish KumarAnonymous mRBbdopMKf0% (1)
- Study of Braking SystemDocumento7 pagineStudy of Braking SystemVishal ChauhanNessuna valutazione finora
- Archive of SID: Design of A New Anti-Lock Braking System For MotorcyclesDocumento9 pagineArchive of SID: Design of A New Anti-Lock Braking System For MotorcyclesIndra Chandra SetiawanNessuna valutazione finora
- ME 3011 Kinematics & Dynamics Capstone ReportDocumento20 pagineME 3011 Kinematics & Dynamics Capstone ReportMuhammad Hussain Bilal100% (1)
- Automatic Accident ControllerDocumento20 pagineAutomatic Accident ControllerSenthil KumarNessuna valutazione finora
- Electromagnetic Braking System: Misal Karade Aarti Nagre Dharmendra Choudhary Yash SahuDocumento8 pagineElectromagnetic Braking System: Misal Karade Aarti Nagre Dharmendra Choudhary Yash Sahurodrigo.cubanoNessuna valutazione finora
- SynopsisDocumento8 pagineSynopsismanoj kumarNessuna valutazione finora
- ABS Modeling and DevelopmentDocumento26 pagineABS Modeling and DevelopmentPardeepNessuna valutazione finora
- Polish Abs Translation Teves MkiiDocumento69 paginePolish Abs Translation Teves MkiiJim AllenNessuna valutazione finora
- Service Manual for SAMAND XU7JPL3 ABS Mando MGH-25Documento38 pagineService Manual for SAMAND XU7JPL3 ABS Mando MGH-25Ivan Leonardo Acevedo Galan100% (1)
- Learn About Electromagnetic BrakesDocumento21 pagineLearn About Electromagnetic BrakesHimanshu JangidNessuna valutazione finora
- DMTSDocumento17 pagineDMTSJosyula Karteek Kashyap me20b092Nessuna valutazione finora
- An Antilock-Braking Systems (ABS) Control A Technical ReviewDocumento10 pagineAn Antilock-Braking Systems (ABS) Control A Technical ReviewJoão FerroNessuna valutazione finora
- Case Study Report On AutomobileDocumento18 pagineCase Study Report On AutomobileSayaliRewaleNessuna valutazione finora
- Braking Systems: By: Navneeth C V Neeharanshu Vaidya Suraj KDocumento24 pagineBraking Systems: By: Navneeth C V Neeharanshu Vaidya Suraj KPrateekNessuna valutazione finora
- Automatic Brake Failure Indicator and Braking System Ijariie5483Documento5 pagineAutomatic Brake Failure Indicator and Braking System Ijariie5483thriveniNessuna valutazione finora
- 206-06 Hydraulic Brake ActuationDocumento19 pagine206-06 Hydraulic Brake ActuationMiguel AngelNessuna valutazione finora
- ABS Operation ExplainedDocumento5 pagineABS Operation ExplainedRaveen ShamenthaNessuna valutazione finora
- Anti Lock Brake System Tata Motors Information PDFDocumento16 pagineAnti Lock Brake System Tata Motors Information PDFValBMSNessuna valutazione finora
- Automobile Brake Failure Indicator Circuit Alerts DriversDocumento5 pagineAutomobile Brake Failure Indicator Circuit Alerts DriversBhavana GummaNessuna valutazione finora
- C4-Brake ABS TrainingDocumento8 pagineC4-Brake ABS TrainingcasvbNessuna valutazione finora
- Braking System GuideDocumento30 pagineBraking System GuideLala GuanyesNessuna valutazione finora
- Fabrication of Magnetic Suspension SystemDocumento46 pagineFabrication of Magnetic Suspension SystemNationalinstituteDsnr100% (1)
- ABSDocumento17 pagineABSAniket MehareNessuna valutazione finora
- Report On Anti Lock Braking SystemDocumento12 pagineReport On Anti Lock Braking SystemParth RathoreNessuna valutazione finora
- Shi Shenshen Thesis Automobile Brake SystemDocumento36 pagineShi Shenshen Thesis Automobile Brake SystemLina M. Abd ElSalamNessuna valutazione finora
- Friction Kinetic Energy Heat: Frictional Brakes Are Most Common and Can Be Divided Broadly Into "Shoe" or "Pad" BrakesDocumento3 pagineFriction Kinetic Energy Heat: Frictional Brakes Are Most Common and Can Be Divided Broadly Into "Shoe" or "Pad" BrakesNikhilVinayNessuna valutazione finora
- Modelling and Development of Antilock Braking System ThesisDocumento43 pagineModelling and Development of Antilock Braking System ThesisNithin ThriveniNessuna valutazione finora
- Automotive Electronic Diagnostics (Course 2)Da EverandAutomotive Electronic Diagnostics (Course 2)Valutazione: 4 su 5 stelle4/5 (2)
- Ignition, Timing And Valve Setting: A Comprehensive Illustrated Manual of Self-Instruction for Automobile Owners, Operators, Repairmen, and All Interested in Motoring.Da EverandIgnition, Timing And Valve Setting: A Comprehensive Illustrated Manual of Self-Instruction for Automobile Owners, Operators, Repairmen, and All Interested in Motoring.Valutazione: 3 su 5 stelle3/5 (4)
- Control of DC Motor Using Different Control StrategiesDa EverandControl of DC Motor Using Different Control StrategiesNessuna valutazione finora
- Diesel Common Rail Injection Electronic Components ExplainedDa EverandDiesel Common Rail Injection Electronic Components ExplainedValutazione: 3.5 su 5 stelle3.5/5 (7)
- The Book of the Singer Junior - Written by an Owner-Driver for Owners and Prospective Owners of the Car - Including the 1931 SupplementDa EverandThe Book of the Singer Junior - Written by an Owner-Driver for Owners and Prospective Owners of the Car - Including the 1931 SupplementNessuna valutazione finora
- Semi-Active Suspension Control Design for VehiclesDa EverandSemi-Active Suspension Control Design for VehiclesValutazione: 5 su 5 stelle5/5 (1)
- VspCoreUsersGuide PDFDocumento42 pagineVspCoreUsersGuide PDFankush_laxmanNessuna valutazione finora
- PICmicro MCU C - An Introduction To Programming The Microchip PIC in CCS CDocumento135 paginePICmicro MCU C - An Introduction To Programming The Microchip PIC in CCS Cvaibhav6820100% (34)
- Sim300 An Handset Design v1.02Documento10 pagineSim300 An Handset Design v1.02ankush_laxmanNessuna valutazione finora
- Kicking Mechanism Pioner 3DXDocumento101 pagineKicking Mechanism Pioner 3DXankush_laxmanNessuna valutazione finora
- Us 5749633Documento8 pagineUs 5749633ankush_laxmanNessuna valutazione finora
- Sms and PduDocumento5 pagineSms and Pduankush_laxmanNessuna valutazione finora
- MPLAB C18 Libraries 51297fDocumento184 pagineMPLAB C18 Libraries 51297fBhausaheb BotreNessuna valutazione finora
- 07 KanekawaDocumento25 pagine07 KanekawaleidieuNessuna valutazione finora
- Ieee tvt08Documento18 pagineIeee tvt08ankush_laxmanNessuna valutazione finora
- Aiaa ValasaraptorDocumento10 pagineAiaa Valasaraptorankush_laxmanNessuna valutazione finora
- Winters FluidpowerDocumento8 pagineWinters FluidpowerJOSE DEL CARMEN TOLEDONessuna valutazione finora
- 08.precommissioning Checklist GeneralDocumento19 pagine08.precommissioning Checklist GeneralAnujGarg100% (1)
- Stress Analysis Bolted JointDocumento11 pagineStress Analysis Bolted JointGustavoYippeekayyayGusNessuna valutazione finora
- AVK Dams - Reservoirs - HydroPower BrochureDocumento15 pagineAVK Dams - Reservoirs - HydroPower Brochureindra putraNessuna valutazione finora
- Control Design and Analysis of Closed-Loop Dynamic Response For Rectilinear Vibration SystemDocumento15 pagineControl Design and Analysis of Closed-Loop Dynamic Response For Rectilinear Vibration SystemVinay Mishra100% (2)
- Design Chapter StaircaseDocumento4 pagineDesign Chapter StaircaseAsish Seeboo100% (1)
- Catalog Ecodan - ATW - 2017 PDFDocumento32 pagineCatalog Ecodan - ATW - 2017 PDFDamian OvidiuNessuna valutazione finora
- 3 - 2017 - Superia X 5 StarDocumento26 pagine3 - 2017 - Superia X 5 Starsomnath serviceNessuna valutazione finora
- Forces and Motion: Basics: Not For Sale, Exclusive For Gordon College OnlyDocumento5 pagineForces and Motion: Basics: Not For Sale, Exclusive For Gordon College OnlyAlyssa FrancoNessuna valutazione finora
- Faculty Development Programme on Fluid Mechanics PropertiesDocumento9 pagineFaculty Development Programme on Fluid Mechanics Propertiesmaran2326Nessuna valutazione finora
- Ec T30 PDFDocumento1.500 pagineEc T30 PDFNorman Valle Sáenz100% (1)
- CE 1999 GATE Question PaperDocumento14 pagineCE 1999 GATE Question Papersubhajit284Nessuna valutazione finora
- Parts Manual M0096787 06 (En Us) 01 ALLDocumento544 pagineParts Manual M0096787 06 (En Us) 01 ALLKawasakiNessuna valutazione finora
- Cadenas de Tiempo Pontiac G5Documento17 pagineCadenas de Tiempo Pontiac G5Jorge Antonio GuillenNessuna valutazione finora
- Driving Without Wheels, Flying Without WingsDocumento18 pagineDriving Without Wheels, Flying Without Wingsaditya_kumar_me100% (1)
- Controls Start-Up, Operation, Service, and TroubleshootingDocumento140 pagineControls Start-Up, Operation, Service, and TroubleshootingRick BradnamNessuna valutazione finora
- Ninja Part PDFDocumento105 pagineNinja Part PDFErlangga AlamNessuna valutazione finora
- TOX FinePress 45 201201 enDocumento16 pagineTOX FinePress 45 201201 enSirbu SorinNessuna valutazione finora
- TOTO MRP Price List - 01-04-2019Documento65 pagineTOTO MRP Price List - 01-04-2019Joshua Gnanaraj100% (1)
- CHP 4 - 4.3 Determinate Structural AnalysisDocumento57 pagineCHP 4 - 4.3 Determinate Structural Analysismhazarath murariNessuna valutazione finora
- Piston Crown Measurement PDFDocumento2 paginePiston Crown Measurement PDFmohamedNessuna valutazione finora
- RMC ParameterDocumento4 pagineRMC Parameterkishor150688Nessuna valutazione finora
- Chung2006 PDFDocumento9 pagineChung2006 PDFNguyen Tran HieuNessuna valutazione finora
- Soalan: Airplane Wings Are Shaped To Make Air Move Faster Over The Top of The Wing. When Air MovesDocumento5 pagineSoalan: Airplane Wings Are Shaped To Make Air Move Faster Over The Top of The Wing. When Air MovesHaniZs ShuhadaNessuna valutazione finora
- Strength & failure modes of concreteDocumento12 pagineStrength & failure modes of concretemaneeshaNessuna valutazione finora
- Accra Technical University: Index NumberDocumento6 pagineAccra Technical University: Index NumberMoro Adams100% (1)
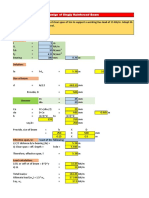
- Singly Reinforced Beam ExcelDocumento3 pagineSingly Reinforced Beam ExcelVEERKUMAR100% (3)
- Specialized User Manual: Command Post WuDocumento8 pagineSpecialized User Manual: Command Post WuМарина Методиева-ЙордановаNessuna valutazione finora
- PC W130B 02 EUDocumento100 paginePC W130B 02 EUОблачноNessuna valutazione finora
- Bourdon Gauge - BellowDocumento14 pagineBourdon Gauge - BellowBikram RoyNessuna valutazione finora