Potrebbero piacerti anche
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5795)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
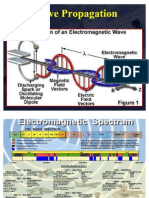
- Lesson 2 Wave PropagationDocumento31 pagineLesson 2 Wave PropagationChuck LynchNessuna valutazione finora
- Biological Effects of Electromagnetic Radiation-Radiowaves and Microwaves-Eurasian Communist CountriesDocumento35 pagineBiological Effects of Electromagnetic Radiation-Radiowaves and Microwaves-Eurasian Communist Countriesbasiliolik100% (2)
- Alarm ManagementDocumento14 pagineAlarm Managementant29539432100% (1)
- Manual BrontoDocumento115 pagineManual BrontoDaniel Reinoso Rojo83% (6)
- Load CellDocumento4 pagineLoad CelljakobNessuna valutazione finora
- Controlador Bomba Jockey Fta 550fDocumento7 pagineControlador Bomba Jockey Fta 550fRubén VélezNessuna valutazione finora
- GSR9 FP1 Compatibility Matrix Bts / BSCDocumento2 pagineGSR9 FP1 Compatibility Matrix Bts / BSCuukrul98Nessuna valutazione finora
- CG Labs Project Final v1Documento38 pagineCG Labs Project Final v1Muzammil Basha100% (4)
- 5kVA Dry Type Transformer SpecsDocumento1 pagina5kVA Dry Type Transformer SpecsKillua X Ma'rufNessuna valutazione finora
- Reguladora de Voltaje MarathonDocumento4 pagineReguladora de Voltaje MarathonFercho SanchezNessuna valutazione finora
- Sylla PDFDocumento50 pagineSylla PDFGiju PaulNessuna valutazione finora
- Catalog Vod RecorderDocumento7 pagineCatalog Vod RecorderAbdiyasa Dharma Inovasi100% (1)
- BDocumento136 pagineBJuan Manuel Ugalde FrancoNessuna valutazione finora
- 3lead Wireless ECG Anwar VahedDocumento63 pagine3lead Wireless ECG Anwar Vahedvenkatb7Nessuna valutazione finora
- HCC4007UB HCF4007UB: Dual Complementary Pair Plus InverterDocumento14 pagineHCC4007UB HCF4007UB: Dual Complementary Pair Plus InverterRendy WandarosanzaNessuna valutazione finora
- Accurate and Dependable Roll Hardness TestingDocumento2 pagineAccurate and Dependable Roll Hardness TestingJabranYounasNessuna valutazione finora
- 2.KKTM Kertas Kerja Chapter1 ErrorDocumento5 pagine2.KKTM Kertas Kerja Chapter1 ErrorZullkifli Bin MuhammadNessuna valutazione finora
- Tutorial MyrioDocumento57 pagineTutorial MyrioLucky Pandu Melyanto100% (1)
- Fly XPR 5582Documento2 pagineFly XPR 5582Miguel Angel Rodriguez FloresNessuna valutazione finora
- B503Sl Series Solar Photovoltaic Pump Controller: Instruction ManualDocumento32 pagineB503Sl Series Solar Photovoltaic Pump Controller: Instruction ManualSalah ali AlmorisyNessuna valutazione finora
- Race Condition in J-K LatchDocumento14 pagineRace Condition in J-K LatchTejas DharaniNessuna valutazione finora
- Lab Manual LIC&C 2017-18Documento40 pagineLab Manual LIC&C 2017-18Arun UpadhyayaNessuna valutazione finora
- P.E.L. Iec 61558-1 2017 2018-07-10Documento3 pagineP.E.L. Iec 61558-1 2017 2018-07-10முருகன்Nessuna valutazione finora
- SWR sm-400s Owners ManualDocumento5 pagineSWR sm-400s Owners Manualsquidman100% (1)
- Power Electronics Ned Mohan Slides Ch29Documento12 paginePower Electronics Ned Mohan Slides Ch29Anoop MathewNessuna valutazione finora
- 10 MM Manifold Mount Solenoid Valve: Product SpecificationsDocumento6 pagine10 MM Manifold Mount Solenoid Valve: Product Specificationshüseyin vururNessuna valutazione finora
- Fox515 Technical DataDocumento2 pagineFox515 Technical DatasyedpandtNessuna valutazione finora
- Siprotec 5 Configuration May 29, 2017 2:18 PM: Note On Function-Points ClassDocumento6 pagineSiprotec 5 Configuration May 29, 2017 2:18 PM: Note On Function-Points ClassOae FlorinNessuna valutazione finora
- Nant A PDFDocumento12 pagineNant A PDFDemarco Dayanghirang FormalejoNessuna valutazione finora
- Lenovo G50-45 NM-A281P ACLU5-ACLU6Documento61 pagineLenovo G50-45 NM-A281P ACLU5-ACLU6Sadiq Al-MohandisNessuna valutazione finora