Potrebbero piacerti anche
- UTN Córdoba - Engranajes y transmisión de movimientoDocumento30 pagineUTN Córdoba - Engranajes y transmisión de movimientojuan420912Nessuna valutazione finora
- Artes Marciales Indice TrabajoDocumento2 pagineArtes Marciales Indice TrabajoJHon MarkNessuna valutazione finora
- NSK Ajustes y Juegos InternosDocumento14 pagineNSK Ajustes y Juegos InternosMiguel Carlin JimenezNessuna valutazione finora
- Engranajes cónicos de 90Documento14 pagineEngranajes cónicos de 90MiguelRodriguezCalderonNessuna valutazione finora
- Transmisión de engranes: tipos y cálculosDocumento36 pagineTransmisión de engranes: tipos y cálculosRene Valero Pabon100% (1)
- Uso y conservación de herramientas de tallerDocumento0 pagineUso y conservación de herramientas de tallerEdgar ZambranoNessuna valutazione finora
- Ferrodisma DisenosDocumento106 pagineFerrodisma DisenosNoel Salazar100% (1)
- 2 Medición de Roscas y EngranajesDocumento19 pagine2 Medición de Roscas y EngranajesYoel JTNessuna valutazione finora
- 11 El Test de La Flecha DesnudaDocumento1 pagina11 El Test de La Flecha DesnudaMario PellegrinoNessuna valutazione finora
- Curso-TCCCDocumento1 paginaCurso-TCCCJonatan Gabriel Segura RamirezNessuna valutazione finora
- Ejemplo Cálculo de Engranajes de Dientes RectosDocumento12 pagineEjemplo Cálculo de Engranajes de Dientes RectosfaustocarpentieroNessuna valutazione finora
- Rutina 8 SemanasDocumento4 pagineRutina 8 SemanasDaniel PeralvoNessuna valutazione finora
- TrinqueteDocumento8 pagineTrinqueteyuradoNessuna valutazione finora
- Hypertrofia GymDocumento9 pagineHypertrofia GymAlejandro DiazNessuna valutazione finora
- Ahora Bien Si Usted Cuenta Con Un AnemometroDocumento8 pagineAhora Bien Si Usted Cuenta Con Un AnemometroAnonymous yammW0RwNessuna valutazione finora
- Modalidades de Tiro Precision y Armas DeportivasDocumento8 pagineModalidades de Tiro Precision y Armas DeportivasSaturnino Quispe MedranoNessuna valutazione finora
- BIOMECÁNICA Grupo1Documento6 pagineBIOMECÁNICA Grupo1CHAHUAYA SABINO SUKERNessuna valutazione finora
- Composición de Funciones: Cálculo 1Documento13 pagineComposición de Funciones: Cálculo 1Válery Roxana Bellota ZárateNessuna valutazione finora
- Los objetos esenciales para sobrevivirDocumento8 pagineLos objetos esenciales para sobrevivirtupaenoesNessuna valutazione finora
- Catalogo PerfilesDocumento42 pagineCatalogo Perfilesmarkosdistefano100% (2)
- Movilidad y FlexibilidadDocumento5 pagineMovilidad y FlexibilidadElUbaNessuna valutazione finora
- Biomecanica Pata de KarateDocumento3 pagineBiomecanica Pata de KarateLuis Herrera GarciaNessuna valutazione finora
- Manual Vasa TrainerDocumento36 pagineManual Vasa TrainerPaco Garcia PayaNessuna valutazione finora
- Seleccionar diámetro de árbol de transmisiónDocumento84 pagineSeleccionar diámetro de árbol de transmisiónRotsen Altuve0% (1)
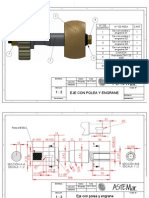
- Eje Con Polea y Engrane ConjuntoDocumento6 pagineEje Con Polea y Engrane ConjuntokilometrokmNessuna valutazione finora
- Conceptos Básicos de Working Model PDFDocumento4 pagineConceptos Básicos de Working Model PDFfernandoj100% (1)
- Análisis DimensionalDocumento12 pagineAnálisis DimensionalJeff Huckleberry100% (1)
- Como Construir Tu RocodromoDocumento8 pagineComo Construir Tu Rocodromorobledo_victor6597Nessuna valutazione finora
- Curso Calculo Diseno Engranajes Reductores VelocidadDocumento22 pagineCurso Calculo Diseno Engranajes Reductores VelocidadMaicol BaqueNessuna valutazione finora
- RR Tutorial - Modelado de Una MBCDocumento2 pagineRR Tutorial - Modelado de Una MBCtatiana matallanaNessuna valutazione finora
- TorneriaDocumento5 pagineTorneriadolardgustavo9467Nessuna valutazione finora
- Ejercicios de EstiramientoDocumento6 pagineEjercicios de EstiramientoMaria Paz Buitrago HernandezNessuna valutazione finora
- EspadaDocumento30 pagineEspadaLucía SánchezNessuna valutazione finora
- Tema 4. Tornillos (Parte I)Documento23 pagineTema 4. Tornillos (Parte I)Javier MedinaNessuna valutazione finora
- Estatutos Asociacion StreetDocumento14 pagineEstatutos Asociacion StreetFLY TECHNessuna valutazione finora
- Full Body 5diasDocumento6 pagineFull Body 5diasximosetunoNessuna valutazione finora
- EngranajeDocumento30 pagineEngranajeLuis Davis Quintana DiazNessuna valutazione finora
- Herrami InsertosDocumento8 pagineHerrami InsertosMiriam JassoNessuna valutazione finora
- Conos1El Calculo de ConicidadesDocumento4 pagineConos1El Calculo de ConicidadesCristal MuranoNessuna valutazione finora
- Soldadura y CaldereríaDocumento2 pagineSoldadura y CaldereríalalaboralNessuna valutazione finora
- Fracturas en Motores DieselDocumento88 pagineFracturas en Motores DieselLarissa100% (1)
- Programa Principal de Torno CNCDocumento61 paginePrograma Principal de Torno CNCNayely Rojas ParionaNessuna valutazione finora
- Manual de Usuario Micrologic 2.0A, 5.0A, 6.0A, 7.0ADocumento29 pagineManual de Usuario Micrologic 2.0A, 5.0A, 6.0A, 7.0AJulio Perez RodriguezNessuna valutazione finora
- Capitulo 12Documento5 pagineCapitulo 12jijilebonNessuna valutazione finora
- ÁRBOLES Y EJES PresentacionDocumento18 pagineÁRBOLES Y EJES PresentacionElba Elena GuerreroNessuna valutazione finora
- Resortes de Compresión FinalDocumento15 pagineResortes de Compresión Finalemaco17Nessuna valutazione finora
- Rutina GymDocumento2 pagineRutina GymbercialesNessuna valutazione finora
- MyojoDocumento3 pagineMyojoJuan Beltrán RodríguezNessuna valutazione finora
- Informe sobre muelas abrasivas para mecanizadoDocumento9 pagineInforme sobre muelas abrasivas para mecanizadoJuanRojasNessuna valutazione finora
- TRX Entrenament en SuspensióDocumento68 pagineTRX Entrenament en SuspensióPablo RLNessuna valutazione finora
- Procedimientos geográficos: Cartografía, orientación y altimetríaDocumento29 pagineProcedimientos geográficos: Cartografía, orientación y altimetríaTomas CaleroNessuna valutazione finora
- ST Electric Shoe Brake Manual - SpanishDocumento53 pagineST Electric Shoe Brake Manual - SpanishJose FernandezNessuna valutazione finora
- 01 CatalogoDocumento830 pagine01 CatalogoHamid HardouzNessuna valutazione finora
- Glosario Técnico AlbañileríaDocumento5 pagineGlosario Técnico AlbañileríaDavid DelgadoNessuna valutazione finora
- TRABAJO El Ojo DirectorDocumento7 pagineTRABAJO El Ojo Directorjoc gonNessuna valutazione finora
- 3.1 Engranajes ConicosDocumento31 pagine3.1 Engranajes ConicosNick DipeNessuna valutazione finora
- Engranajes ConicosDocumento31 pagineEngranajes Conicoswaldor sulcaNessuna valutazione finora
- Resumen de Bandas Engranes y CojinetesDocumento18 pagineResumen de Bandas Engranes y CojinetesAndrés BedollaNessuna valutazione finora
- Tornillo Sin Fin-Rueda Dentada-AgmaDocumento16 pagineTornillo Sin Fin-Rueda Dentada-AgmaALexander HuancahuireNessuna valutazione finora
- 5.2 Diseño de EngranajesDocumento33 pagine5.2 Diseño de EngranajesRaphaelCaldeNessuna valutazione finora
- Egresados Ingeniería Ambiental A Abril 2013Documento3 pagineEgresados Ingeniería Ambiental A Abril 2013Francisco Xavier Pineda OrtegaNessuna valutazione finora
- Código de Dibujo Técnico-Mecánico EcuatorianoDocumento150 pagineCódigo de Dibujo Técnico-Mecánico EcuatorianoJavier Carvajal63% (8)
- Filosofía GriegaDocumento11 pagineFilosofía GriegaFrancisco Xavier Pineda OrtegaNessuna valutazione finora
- Claves Mortal CombatDocumento6 pagineClaves Mortal CombatFrancisco Xavier Pineda OrtegaNessuna valutazione finora
- Norma ChimeneasDocumento17 pagineNorma ChimeneasGustavo RiveraNessuna valutazione finora
- Silabo Políticas y Finanzas Públicas 2Documento13 pagineSilabo Políticas y Finanzas Públicas 2Francisco Xavier Pineda OrtegaNessuna valutazione finora
- Claves Mortal CombatDocumento6 pagineClaves Mortal CombatFrancisco Xavier Pineda OrtegaNessuna valutazione finora
- Como Hacer Adornos de CarameloDocumento31 pagineComo Hacer Adornos de CarameloFrancisco Xavier Pineda OrtegaNessuna valutazione finora
- Tutorial Pepakura DesignerDocumento34 pagineTutorial Pepakura DesignerMiguel Gallardo40% (5)
- Analisis DimensionalDocumento4 pagineAnalisis DimensionalDiana RuizNessuna valutazione finora
- Diseno Del Reductor de VelocidadesDocumento62 pagineDiseno Del Reductor de VelocidadesCarlos Antonio Chavez EgoavilNessuna valutazione finora
- Electricidad Y Elecrtonica Temas: Bujias de Encendido Mantenimiento de Las Bujias. Unidades Auxiliares de Arranque. Bujias de EncendidoDocumento3 pagineElectricidad Y Elecrtonica Temas: Bujias de Encendido Mantenimiento de Las Bujias. Unidades Auxiliares de Arranque. Bujias de EncendidoFrancisco Xavier Pineda OrtegaNessuna valutazione finora
- Matriz de PriorizaciónDocumento33 pagineMatriz de PriorizaciónFrancisco Xavier Pineda Ortega83% (6)
- 7 CompresoresDocumento16 pagine7 CompresoresMejias Ladera RobertNessuna valutazione finora
- Control de Compresores AlternativosDocumento9 pagineControl de Compresores AlternativosRubenOnsulveNessuna valutazione finora
- Problemas de CinematicaDocumento4 pagineProblemas de CinematicaOrlando JoseNessuna valutazione finora
- Ejercicios VariosDocumento125 pagineEjercicios VariosElias FiencoNessuna valutazione finora
- Fuerzas Que Se Oponen Al Movimiento de Un VehículoDocumento4 pagineFuerzas Que Se Oponen Al Movimiento de Un VehículoJorge Antonio Hidalgo Pacheco100% (1)
- Ciencias (Química y Física)Documento29 pagineCiencias (Química y Física)Noemy LópezNessuna valutazione finora
- Dawn 125Documento107 pagineDawn 125Michaell KingsNessuna valutazione finora
- Ejercicios de movimiento circular con soluciónDocumento11 pagineEjercicios de movimiento circular con solucióncarlososoriorNessuna valutazione finora
- Clase Dinámica - Mov. RecDocumento18 pagineClase Dinámica - Mov. RecEsteban Inostroza VasquezNessuna valutazione finora
- TeorasdefallabajocargasestticasDocumento20 pagineTeorasdefallabajocargasestticasLiNessuna valutazione finora
- 02 Fiscia CEPRE - Setiembre - Diciembre 2013Documento4 pagine02 Fiscia CEPRE - Setiembre - Diciembre 2013William TaipeNessuna valutazione finora
- Ejercicios de TIC SDocumento3 pagineEjercicios de TIC SArturo HernandezNessuna valutazione finora
- Documento de VibracionesDocumento114 pagineDocumento de VibracioneskatherineNessuna valutazione finora
- ACT Matrices de Transformación Cinemática Directa e InversaDocumento7 pagineACT Matrices de Transformación Cinemática Directa e InversaLuis MarianoNessuna valutazione finora
- Fisica I PDFDocumento2 pagineFisica I PDFCristian Milton CZNessuna valutazione finora
- Guia Completa 19-20Documento15 pagineGuia Completa 19-20BenitoMartinNessuna valutazione finora
- Cinematica de La Particula IiDocumento5 pagineCinematica de La Particula IiIsrael Silva BernalNessuna valutazione finora
- CLASE2Documento22 pagineCLASE2salomonejeNessuna valutazione finora
- Mecanismos de transmisión en vehículosDocumento9 pagineMecanismos de transmisión en vehículosDanilo Carrillo CostasNessuna valutazione finora
- INFORME 04 DinamicaDocumento10 pagineINFORME 04 DinamicaghinoNessuna valutazione finora
- Salud CinematicaDocumento2 pagineSalud CinematicaDeixhy JaimhexNessuna valutazione finora
- Informe Dinamica 1Documento7 pagineInforme Dinamica 1Natalia Suarez RomeroNessuna valutazione finora
- Ejercicios Solucionados de Oscilaciones y Ondas Unidad Ondas ElectromagneticasDocumento37 pagineEjercicios Solucionados de Oscilaciones y Ondas Unidad Ondas ElectromagneticasDeivid Quinde Constante0% (1)
- INFORME 7 Mecanica de SolidosDocumento18 pagineINFORME 7 Mecanica de SolidosPercy Daniel Arteaga ZunigaNessuna valutazione finora
- TALLER 1 Semana 1Documento5 pagineTALLER 1 Semana 1Jesusdavid Ricardo Alva Carbajal100% (1)
- Libro HalterofiliaDocumento175 pagineLibro HalterofiliaMaria Belen RMNessuna valutazione finora
- Velocidad Instantánea y Velocidad MediaDocumento10 pagineVelocidad Instantánea y Velocidad MediaIan CarlosNessuna valutazione finora
- Movimiento Rectilíneo Uniforme (Pista Neumática) .Documento6 pagineMovimiento Rectilíneo Uniforme (Pista Neumática) .NANCY JEANETTE RODRÍGUEZ PERUGACHINessuna valutazione finora
- Tren de Engranes U4Documento22 pagineTren de Engranes U4Oscar Ulises Martínez Palacios100% (1)
- Puente trasero y sus componentesDocumento23 paginePuente trasero y sus componentesSQ Yosbd100% (1)
- Problemas de Movimiento Circular UniformeDocumento6 pagineProblemas de Movimiento Circular Uniformeleidy100% (1)