Documenti di Didattica
Documenti di Professioni
Documenti di Cultura
Thesis Kenji Shimizu
Caricato da
maseratiiiDescrizione originale:
Copyright
Formati disponibili
Condividi questo documento
Condividi o incorpora il documento
Hai trovato utile questo documento?
Questo contenuto è inappropriato?
Segnala questo documentoCopyright:
Formati disponibili
Thesis Kenji Shimizu
Caricato da
maseratiiiCopyright:
Formati disponibili
Application of modal analysis
to strongly stratified lakes
Kenji Shimizu
B. Eng. (Mechanical) Tokyo Institute of Technology, Tokyo, Japan.
M. Eng. (Environmental) Tokyo Institute of Technology, Tokyo, Japan.
This thesis is presented for the degree of Doctor of Philosophy
of The University of Western Australia.
April 2008
iii
Abstract
Modal analysis for strongly stratified lakes was extended to obtain a better
understanding of the dynamics of the basin-scale motions. By viewing the basin-scale
motions as a superposition of modes, that have distinct periods and three-dimensional
structures, the method provides a conceptual understanding for the excitation, evolution,
and damping of the basin-scale motions. Once the motion has been decomposed into
modes, their evolution and energetics may be extracted from hydrodynamic simulation
results and field data. The method was applied to Lake Biwa, Japan, and Lake Kinneret,
Israel, and used for a theoretical study.
The real lake applications showed that winds excited basin-scale motions that had a
surface layer velocity structure similar to the wind stress pattern. Three-dimensional
hydrodynamics simulations of Lake Biwa indicated that most of the energy input from
winds was partitioned into the internal waves that decayed within a few days. The gyres,
on the other hand, received much less energy but dominated the dynamics during calm
periods due to their slow damping. Analyses of field data from Lake Kinneret suggested
that the internal waves, excited by the strong winds every afternoon, were damped over
a few days primarily due to bottom friction. Theoretical investigations of damping
mechanisms of internal waves revealed that bottom friction induced a velocity anomaly
at the top of the boundary layer that drained energy from the nearly inviscid interior by
a combination of internal wave cancelling and spin-down.
These results indicate that gyres induce long-term horizontal transport near the
surface and internal waves transfer energy from winds to near-bottom mixing. Modal
structure of dominant basin-scale internal waves can induce large heterogeneity of near-
bottom mass transfer processes. The method presented here provides a tool to determine
how basin-scale motions impact on biogeochemical processes in stratified lakes.
iv
v
Table of contents
Abstract ............................................................................................................................iii
Table of contents............................................................................................................... v
List of tables.................................................................................................................... vii
List of figures .................................................................................................................viii
List of symbols...............................................................................................................xiii
Acknowledgements.......................................................................................................xvii
Preface............................................................................................................................ xix
Chapter 1. Introduction ..................................................................................................... 1
1.1 Motivation.......................................................................................................... 1
1.2 Overview............................................................................................................ 2
Chapter 2. Horizontal structure and excitation of primary motions in a strongly
stratified lakes.......................................................................................................... 4
2.1 Introduction........................................................................................................ 4
2.2 Field Data........................................................................................................... 8
2.3 Theory of modal analysis................................................................................. 10
2.3.1 Basic equations and solutions ......................................................... 10
2.3.2 Some property of modes ................................................................. 13
2.3.3 Decoupled dynamic equations of individual modes ....................... 14
2.4 Modal analysis of Lake Biwa........................................................................... 16
2.4.1 Numerical method........................................................................... 16
2.4.2 Horizontal structure and excitation of internal waves..................... 18
2.4.3 Spatial structure and excitation of gyres ......................................... 20
2.5 Three-dimensional hydrodynamic simulations of Lake Biwa ......................... 23
2.5.1 Hydrodynamic model...................................................................... 23
2.5.2 Preferential excitation of internal waves......................................... 23
2.5.3 Excitation of gyres by wind stress curl ........................................... 26
2.6 Discussion........................................................................................................ 27
Appendix 2.A -- Self-adjointness of operator K ....................................................... 33
Chapter 3. Energetics and damping of internal waves in a strongly stratified lake....... 37
3.1 Introduction...................................................................................................... 37
3.2 Theory of modal analysis with linear damping................................................ 41
3.2.1 Shallow water equations and the associated modes........................ 41
3.2.2 Governing equations of modal amplitude and energy .................... 45
3.3 Study site and field data................................................................................... 46
3.3.1 Study site......................................................................................... 46
vi
3.3.2 Field data......................................................................................... 46
3.4 Spatial structure of basin-scale internal waves in Lake Kinneret .................... 49
3.5 Energetics and damping of internal waves ...................................................... 53
3.5.1 Extraction of internal waves by mode fitting.................................. 53
3.5.2 Energetics of basin-scale internal waves ........................................ 58
3.5.3 Damping of basin-scale internal waves by bottom friction ............ 60
3.6 Spatial variability of near-bottom transport processes..................................... 61
3.7 Discussion........................................................................................................ 64
Appendix 3.A -- Derivation of modal equations for a weakly dissipative system.... 68
Chapter 4. Damping mechanisms of internal waves in a continuously stratified
rotating basin ......................................................................................................... 71
4.1 Introduction...................................................................................................... 71
4.2 Governing equations and scaling..................................................................... 74
4.3 Ekman normal velocities induced by oscillatory boundary layers .................. 77
4.3.1 Bottom boundary layer.................................................................... 77
4.3.2 Sidewall boundary layer.................................................................. 80
4.3.3 Bottom corner region ...................................................................... 82
4.4 Perturbation analysis of damped internal waves.............................................. 83
4.4.1 Inviscid solutions ............................................................................ 84
4.4.2 Correction to the inviscid basin-scale internal waves due to
boundary layer presence ......................................................................... 87
4.5 Internal wave cancelling in a flat-bottomed rectangular basin ........................ 90
4.6 Damping of gravity waves in circular basins................................................... 93
4.7 Discussion...................................................................................................... 101
4.8 Conclusions.................................................................................................... 103
Appendix 4.A -- Orthogonality of modes in a continuously stratified rotating
basin with arbitrary shape .............................................................................. 104
Appendix 4.B -- Horizontal modes in a flat-bottomed circular basin.................... 108
Appendix 4.C -- Horizontal modes in a flat-bottomed circular basin.................... 110
Chapter 5. Conclusions ................................................................................................. 113
5.1 Summary........................................................................................................ 113
5.2 Recommendations for future work ................................................................ 114
Bibliography.................................................................................................................. 117
vii
List of tables
Table 2.1. Some characteristics of the internal waves and gyres in Lake Biwa. Some of the
topographic waves and surface waves (seiches) are also included to illustrate the
spectrum of the modes. The surface and internal waves are numbered in decreasing
order of their natural periods, while the geostrophic gyres are numbered in the opposite
order. No number is assigned to topographic waves. Abbreviations are HM:
horizontal mode, PE: percentage of the available potential energy to the total energy,
[ ] r
E
: mean modal total energy in the hydrodynamic simulation during BITEX 93, GS:
geostrophic gyre (calculated as Rossby wave in the upper layer), TW: topographic
wave, IW: (vertical mode 1) internal wave, SW: surface wave (seiche), CG: cyclonic
gyre, AG: anticyclonic gyre, CC: cyclonic cell, AC: anticyclonic cell, NL: nodal line,
NB: North Basin, N: north, S: south, and M: middle.
Inertial period is 20.7 h.
Calculated as the ratio of sum of the first two terms in Eq. 2.15 to sum of all the terms.
#
The sign [r] in the superscript indicates the sum of the conjugate pair, which have
positive and negative angular velocity with the same magnitude and the same modal
structure.
References in the last column indicate the report of similar structure.
Data sources are 1) Endoh (1986), 2) Endoh and Okumura (1993), 3) Kumagai et al.
(1998), 4) Kanari (1975), 5) Saggio and Imberger (1998), 6) Endoh et al. (1995a), 7)
Okamoto and Endoh (1995), and 8) Kanari (1974). All data except 8) are based on field
observation during summer, while 8) is based on a two layer model where the depths of
the North and South Basin are taken as 50 m and 5 m, respectively. .......................................17
Table 3.1. Characteristics of basin-scale internal waves in Lake Kinneret. Modal indices (first
column) are assigned in ascending order of the angular frequency over all internal
waves (irrespective of their vertical structure), and the names (second column) are
assigned on the basis of the corresponding internal wave structure in a flat-bottomed
elliptical basin (see text).
( ) r
opt
and
( ) r
b
are damping rates estimated respectively by the
mode-fitting technique and by using the equivalent linear bottom friction coefficient
(Eq. 3.30). The estimated modal total energy (
[ ] r
E
), rates of energy input (
[ ] r
W
), and
rates of energy dissipation (
[ ] r
D
) averaged over the field campaign are shown in the last
three columns. Abbreviations are V: vertical mode, H: horizontal mode, C: cyclonic
wave, and A: anticyclonic wave.
Numbers in parenthesis indicate angular
frequencies with bottom friction. Inertial frequency is 7.83 10
-5
rad s
-1
.
The middle
values indicate the optimum damping rates and dissipation rates, and left and right
values show the sensitivity calculated based on 5% increase of the mean square error
(Eq. 3.25). If the upper bound of
( ) r
opt
goes to infinity, the corresponding upper bound of
[ ] r
D
is calculated from the energy input assuming the energy is immediately dissipated. .......56
viii
List of figures
Fig. 2.1. Bathymetry of Lake Biwa and computational grids: (a) bathymetry of Lake Biwa and
locations of measurement stations, (b) magnified plan view of computational grid in A
(common for both the modal analysis and ELCOM simulations), (c) computational grid
along cross-section B-B used for the modal analysis, and (d) schematic computational
grid along cross-section B-B used for the ELCOM simulations (vertical grid resolution
is finer than the schematic). Thin and thick lines in panel (a) show bathymetry contour
with 10-m interval and horizontal boundaries of computational grid at the surface and
18-m deep, respectively. The dashed line indicates a boundary between the northern
and southern halves that are used for the calculation of spatially averaged wind stress
and its curl (see Fig. 2.7)............................................................................................................ 9
Fig. 2.2. Temperature profiles used for the modal analysis and the hydrodynamic simulations.
The profiles in 1993 and 1994 were measured at BN50 and Sta. 17B, respectively. For
the modal analysis with two-layer stratification, the depth of the interface was set to 18
m (corresponds to maximum buoyancy frequency). ................................................................ 10
Fig. 2.3. Internal waves in Lake Biwa: (a) V1H1, (b) V1H2, (c) V1H4, and (d) V1H6. The
middle panels correspond to the phase where the rates of energy input (
( )
) (
Re
r
W
) from
spatially uniform winds are the largest (
) (r
= 30, 120, 115, 70, see Fig. 2.4), and the
right panels correspond to a quarter period after the left. Shading and vectors show the
interface displacement and the average velocity in the upper layer, respectively. In the
smaller left panels, shading and lines respectively show co-range contour and co-phase
lines of wave trough with 45 interval. The co-phase lines with triangles correspond to
the phase shown in the middle figures, and the triangles show direction of rotation. The
modes are normalized to
) ( ~ r
e
= 2 GJ. Ellipses with dashed lines indicate cyclonic and
anticyclonic cells used to calculate the dispersion relationship (see Fig. 2.11). ...................... 19
Fig. 2.4. Normalized maximum energy input from spatially uniform winds blowing from
different directions. Since energy input depends on the phase of the mode, the
maximize energy input is normalized by the norm of
) (
~
r
and f (thus vertical axis
corresponds to ( ) ( ) ( ) 1
/ , ,
r r r
W
M f M f
). Wind direction is 0 when the wind is blowing
from the north, and it is positive clockwise. ............................................................................ 20
Fig. 2.5. Geostrophic gyres in Lake Biwa: (a) L1H1, (b) L1H2, and (c) L1H3. The panels
show the most frequently observed phase during days 248-256 in the simulation results
(
) (r
= -112.5, -135, 135). Shading and vectors show the interface displacement and
the average velocity in the upper layer, respectively. The modes are normalized to
) ( ~ r
e
= 2 GJ...................................................................................................................................... 21
Fig. 2.6. Typical wind patterns over Lake Biwa: (a) the SE wind, (b) the lake breeze, and (c)
the NW wind. All examples were taken from the wind field during BITEX93. Wind
data measured at five land-based stations were corrected against the offshore station
data (see text) and linearly interpolated over the lake. Circles and a triangle indicate
land-based and offshore meteorological stations, respectively. ............................................... 22
Fig. 2.7. Spatially averaged (a) wind stress and (b) wind stress curl in 1994. Lake Biwa was
split into northern and southern halves by the dashed line shown in Fig. 2.1, which
corresponds to an approximate boundary between the First and Second Gyre. Data
were low-pass filtered with a cut-off frequency of 7 d. ........................................................... 22
Fig. 2.8. Comparison of temperature profiles at BN50: (a) EW and NS components of the
wind velocity (positive when wind is blowing from west and south, respectively), (b)
the thermistor chain data, and (c) the results of the simulation. All data were averaged
and subsampled at 30-min interval for plotting purposes. Please note that the
ix
discrepancy of temperature near the surface is due to negligence of surface heat
dynamics in the simulation. ......................................................................................................24
Fig. 2.9. Evolution of the amplitude and phase of (a) V1H1, (b) V1H2, (c) V1H4, and (d)
V1H6 internal waves. Only relative magnitude of the amplitude have relevance
because their absolute values depend on choice of normalization factor
) ( ~ r
e
. The phase
increases at a rate of
) (r
when the modes are free, since the phase shown here is
related to the modes with positive natural frequencies. The results during the shaded
period are not reliable since the interface displacement was too large to apply the linear
theory. The phase in panels (c) and (d) are also not reliable when the amplitudes are
low, e.g., days 242-245.............................................................................................................25
Fig. 2.10. Comparison of average velocity in the upper 10 m between field measurements by
an ADCP over two days and the results of the simulations averaged over the
corresponding two days on (a) 22-23 June 1994 and (b) 26-27 July 1994. The observed
velocities along 11 transects in EW direction were linear interpolated to plot the ADCP
data. ..........................................................................................................................................26
Fig. 2.11. Dispersion relationship of the fundamental mode (a) Kelvin wave and (b) Poincar
wave in elliptic basins. Solid lines represent contour of the ratio of the natural angular
frequency to the inertial frequency
1 ( ) r
f
, dotted lines indicate the natural period of
the V1H1-H8 internal waves in Lake Biwa, symbols indicate dispersion relation of
each cell in their horizontal structure (see Fig. 2.3), a and b are the half-length of the
major and minor axis of a basin or a cell, respectively, and
long
S
and
lat
S
are the Burger
number based on major and minor axis length respectively. For V1H1, the half-length
of the thalweg was used as the major axis length. ....................................................................28
Fig. 2.12. Comparison of (a) the modal total energy
[ ] r
E
(Eq. 2.20) and accumulated energy
input
( )
[ ]
Re
r
W
(Eq. 2.23), and (b) the phase deviation and accumulated phase input
( )
) ( ) (
2 / Im
r r
E W
(Eq. 2.24) for V1H1 internal wave. In panel (b), the deviation of the
phase was calculated by straightening the extracted phase (Fig. 2.9a) and subtracting
the constant increase of phase at a rate of
) (r
. Since the phase input was not reliable
when the total energy was small, the accumulation of phase input was equated to the
phase deviation on day 236.9 and 240.8 (triangles). See Table 2.1 and Fig. 2.9 for the
meaning of [r] in the superscript and shaded period, respectively. ..........................................30
Fig. 2.13. Comparison of the modal total energy
[ ] r
E
(Eq. 2.20) and accumulated energy input
( )
[ ]
Re
r
W
(Eq. 2.22) for (a) sum of all geostrophic modes, and (b) L1H1 and (c) L1H2
geostrophic gyres. See Table 2.1 and Fig. 2.9 for the meaning of [r] in the superscript
and shaded period, respectively................................................................................................31
Fig. 2.14. Energy partitioning among different classes of modes extracted from the results of
the hydrodynamic simulation during BITEX93 using two layer approximation: (a)
total energy
[ ] r
E
and (b) accumulated energy input from winds
( )
[ ]
Re
r
W
. The solid lines
show the accumulation for each class, and dashed, dotted, and dot-dash lines
correspond to the accumulation up to the 1
st
, 5
th
, and 10
th
internal wave modes and 1
st
,
20
th
, and 50
th
geostrophic modes. See Table 2.1 for the meaning of [r] in the
superscript. ...............................................................................................................................32
Fig. 3.1. Bathymetry of Lake Kinneret and locations of measurement stations. Circles and
triangles show locations of thermistor chains (equipped with wind sensor) and wind
sensors, respectively. Thick lines indicate horizontal boundaries of computational grids
for modal computation with the interfaces at 14.4 m and 19.3 m deep, corresponding to
25 C and 19 C isotherms. ......................................................................................................47
x
Fig. 3.2. Results of the field experiment from 18 Jun to 01 Jul 2001. (a) Wind speed and (b)
wind direction measured 2.4 m above the water surface at Ty (close to Tv), and
isotherm depths at (c) Tg, (d) Tf, (e) T9, (f) T7, (g) Tv, and (h) T4. In panel (b), wind
direction is 0 for wind blowing from north and positive clockwise. In panels (c-h),
isotherms are plotted with 2 C interval with the top line being 25 C isotherm. 25 and
19 C isotherms were used for the mode fitting, and dashed lines show basin-wide
trends of the isotherm deepening used to calculate isotherm displacements. .......................... 48
Fig. 3.3. Background vertical structures. (a) Profiles of temperature, , and the associated
buoyancy frequency, N, at T4 averaged from day 170.5 to 171.5, (b) modal
displacements,
) (
n
h
, and (c) modal horizontal velocity,
) (
, induced by vertical mode 1
~ 3 internal waves under continuous stratification shown in panel (a), and (d) thickness
of the BBL, h
BBL
, taken from Fig. 5 in Marti and Imberger (2006). In order to calculate
the vertical modes, the bottom boundary condition was imposed at 27 m deep,
corresponding to the average depth. Horizontal dotted lines indicate depths of the
interfaces used for modal analysis. .......................................................................................... 50
Fig. 3.4. Diurnal internal waves in Lake Kinneret. (a, b) V2H3C and (c, d) V1H1C. Panels (a)
and (c) correspond to internal wave field when net transport in the surface layer is from
west to east, corresponding to the phase during the strong diurnal westerly winds, and
panels (b) and (d) a quarter period after panels (a) and (c). Shading in panels (a, c) and
(b, d), respectively, indicates
( )
3 2
5 . 0 +
and
( )
3 2
5 . 0
, which approximately
correspond to V1 and V2 components of the displacements (see text). Solid lines
correspond to zero displacement, and vectors left and right, respectively, show layer-
averaged velocity in the bottom and middle layer. .................................................................. 51
Fig. 3.5. Same as Fig. 4 but for semi-diurnal internal waves. (a, b) V1H3C and (c, d) V1H1A. ....... 52
Fig. 3.6. Comparison of 25 C and 19 C isotherm displacements at the six stations. (a) Tg,
(b) Tf, (c) Tg, (d) T7, (e) Tv, and (f) T4. Solid lines: observation (detrended), dashed
lines: prediction based on modal amplitude equations, Eq. 3.18 (used for fitting), and
dotted lines: prediction (not used for fitting). .......................................................................... 55
Fig. 3.7. Decomposition of predicted 25 C and 19 C isotherm displacements at Tf into five
internal wave components. (a) Sum of the five internal waves, (b) V2H3C, (c) V1H1C,
(d) V2H1A, (e) V1H3C, and (f) V1H1A. ................................................................................ 57
Fig. 3.8. Estimated partitioning of (a) total (available potential plus kinetic) energy, (b)
accumulated rate of work done by winds, and (c) accumulated rate of energy
dissipation. The lines show accumulation for each internal wave, so that the top lines
show the sum for the five internal waves................................................................................. 59
Fig. 3.9. Spatial distribution of (a) bottom shear stress, (b) dissipation rate averaged in the
BBL, (c) entrainment rate at the top of the BBL, and (d) mass transfer coefficient at the
sediment-water interface. The values shown are 90th percentile for panel (a) and
average over the field campaign for panels (b-d). The BBL thickness is assumed to be a
function of depth (Fig. 3.3d), and Sc = 500 (corresponding to O
2
) is used to estimate
the mass transfer coefficient. Estimations were made only below the thermocline for
panel (b-d). The entrainment rate may be overestimated near the perimeter because the
strong stratification leads to lower mixing efficiency (Lemckert et al. 2004). ........................ 62
Fig. 3.10. Variables shown in Fig. 3.9 expressed as a function of bottom depth. (a) Bottom
shear stress, (b) dissipation rate averaged in the BBL, (c) entrainment rate at the top of
the BBL, and (d) mass transfer coefficient at the sediment-water interface. Open circles
show 1-m (arithmetic) bin average of 90th percentile for panel (a) and average over the
field campaign for panels (b-d). The triangles in panel (b) indicate results of direct
turbulent measurements in the BBL at different locations by Lemckert et al. (2004).
The entrainment rate may be overestimated in the metalimnion (shaded area in panel
xi
[c]) because the strong stratification leads to lower mixing efficiency (Lemckert et al.
2004).........................................................................................................................................63
Fig. 3.11. Absolute value of temporally averaged frequency response function defined as
) ( ) (
1
) (
1
) ( ~ ~
,
~
r r
s
r r
e a v H
=
. (see Eq. 3.26). Normalized forcing frequency and damping
rate are defined as
f
r
f
1
) (
+
=
and
) (
1
) ( ) ( r r r
+
=
. Dotted lines, respectively, indicate
the angular frequencies of V1H1A, V1H3C, V2H1A, V1H1C, and V2H3C from left to
right. .........................................................................................................................................65
Fig. 4.1. Ekman velocities, (u
E
, v
E
), when (u
I,
v
I
) = (1, 0) and t = 0 (see Eq. 4.14). Profiles (a)
to (i) correspond to S =
* 1
f
= 0.30, 0.70, 0.90, 0.99, 1.00, 1.01, 1.10, and 3.00
with 1.5 offset for each profile. Profiles (a) and (i) are almost identical to the Ekman
layer and the Stokes layer, respectively. Note the sharp transition of the structure near
S = 1.00. ................................................................................................................................79
Fig. 4.2. Ekman transport in the rotating bottom boundary layer, (
Ebx
q
,
Eby
q
), and sidewall
boundary layer,
Ewy
q
, when (u
I,
v
I
) = (1, 0). (a) Real part (in phase with the far field
flow), and (b) imaginary part (quarter period ahead of the far field flow). In panel (b),
solid and dashed lines coincide for
1 < S
. .............................................................................80
Fig. 4.3. Internal wave cancelling of the fundamental mode internal wave in a linearly
stratified rectangular basin with N = 1 and
2 2
S B =
. (a)-(c) Vertical profiles of vertical
velocity w, horizontal velocity u, and pressure p, respectively, (d) time series of
isopycnal displacements
( ) w i
~ ~
1
=
and horizontal velocities u
~
induced by inviscid
and dissipative modes at z = -0.75 with (E/S)
1/2
= 0.1, (e) time series of 1
st
order
vertical velocity, 0
th
order pressure, and 1
st
order vertical energy flux at z = -1, (f)
staggered plot of vertical energy flux in time and depth, and (g) temporally averaged
vertical energy flux. All variables at x = 0.25 are plotted.........................................................93
Fig. 4.4. Spin-down of the fundamental internal Kelvin wave mode with S = 0.1 in a linearly
stratified basin with N = 1 and
2 2
S B =
. (a) Plane view of the dissipative modal
structure when (E/S)
1/2
= 0.05, (b) inviscid modal structure, (c) the 1
st
order correction
to the modal structure, (d) radial Ekman transport along solid line in panel (b), (e)
staggered plot of 1
st
order vertical velocity along vertical cross-section shown in panel
(c) by solid line, (f) staggered plot of the temporally averaged 1
st
order vertical energy
flux, and (g) temporally and radially averaged vertical energy flux. Shading and vector
in panels (a)-(c) show the isopycnal displacements
( )
) 1 , 1 , 1 (
1
) 1 , 1 , 1 (
0
) 1 , 1 , 1 ( ~ ~ + +
+ + + +
= w i
and
horizontal velocities (
) 1 , 1 , 1 ( ~ + +
u
,
) 1 , 1 , 1 ( ~ + +
v
) at z = -0.75, respectively. Sidewall boundary
layer is neglected to illustrate the spin-down process. Vertical modes are computed
numerically using 20 vertical grid points. First 200 horizontal wave modes (including +
and - modes) and 100 horizontal geostrophic modes are summed for plotting purposes. ........97
Fig. 4.5. Frequency corrections and damping rates of basin-scale internal waves. (a)
Dispersion relationships of basin-scale internal waves, (b)-(c) the 1
st
order correction to
the angular frequencies and damping rates due to bottom boundary layer, respectively,
(d) those due to sidewall boundary layer, (e)-(f) the damping rates of fundamental
Kelvin wave mode (R1A1 C) and Poincar wave mode (R1A1 A) due to internal wave
cancelling and spin-down, respectively. In panel (d), dash-dot line almost coincides
with solid line, and dashed and dotted lines with abscissa. Note that damping rates in
panels (c) remain finite as S 0, although they appear very large due to non-
normalization by
) , , (
0
n m l
. Abbreviations are R#: radial mode #, A#: Azimuthal mode #,
C: cyclonic, and A: anticyclonic.
) , , (
1
n m l
is divided by
) , ( l l
V
f
panels (b, c, e, f) and by A
in panel (d) for plotting purposes. ............................................................................................99
xii
Fig. 4.6. Dissipative modal structure of Kelvin waves with S = 0.3 (first row), S = 0.6 (second
row), S = 0.8 (third row), and Poincar waves with S = 0.8 (fourth row) and S = 10
(fifth row) in linearly stratified basin with N = 1 and
2 2
S B =
. Shading and vector
show isopycnal displacements and horizontal velocities at z = -0.75, respectively. The
first column shows the dissipative modal structure when (E/S)
1/2
= 0.05, and the second
shows the inviscid modal structure. The third to fifth columns correspond to first order
corrections due to the internal wave cancelling due to bottom boundary layer, spin-
down, and internal wave cancelling due to sidewall boundary layer, respectively. The
variables are divided by A in the fifth column, and by 5 and 2 in panels (n) and (t),
respectively, for plotting purposes. See caption of Fig. 4.4 for number of modes used
for plotting. ............................................................................................................................ 100
Fig. 4.7. Lake Kinneret. (a) Bathymetry, (b) typical stratification at T4 and associated
buoyancy frequency in summer, and (c) vertical modes under stratification in panel (b).
In panel (a), the origin of the figure is situated at 32.70N, 35.51E, and contour lines
are drawn every 5 m............................................................................................................... 103
xiii
List of symbols
Variables
Roman (lowercase)
a
0
Typical isopycnal displacement (m)
) ( ~ r
a
Modal amplitude of r
th
([quasi-] three-dimensional) mode (-)
) , (
~
s r
b
Modal expansion coefficients (-)
c Celerity (m s
-1
)
c
b
, c
sw
Linear friction coefficient (m
s
-1
)
) ( ~ r
e
Normalizing factor of r
th
(spatial) mode (J)
f Coriolis parameter (rad s
-1
)
) (
~
r
f
Modal force for r
th
mode (s
-1
)
f External force vector
g Accerelation due to gravity (m s
-2
)
h Layer thickness (m)
i = 1 Imaginary unit
k Layer index (-)
k
Vertical unit vector (-)
l Length element along horizontal boundary (m)
( )
T
y x
n n n , =
Unit normal vector to boundary (-)
p Pressure (N m
-2
)
) , (
'
~ m l
p
Dynamic pressure induced by l
th
vertical, m
th
horizontal three-
dimensional mode (N m
-2
)
E
q Ekman transport (m
2
s
-1
)
r Radial coordinate (m)
( )
T
y x
s s s , =
Horizontal unit normal vector to sidewall (-)
t Time (s)
u x component of velocity (m s
-1
)
) , ( m l
u
m
th
horizontal modal velocity that belongs to l
th
vertical mode
(m s
-1
)
) , ( ~ m l
u
Horizontal velocity in induced by lth vertical m
th
horizontal
three-dimensional mode (m s
-1
)
u
E
x component of Ekman velocity / Sidewall Ekman normal
velocity (m s
-1
)
v y component of velocity (m s
-1
)
v
E
y component of Ekman velocity (m s
-1
)
) , ( m l
v
m
th
horizontal modal velocity that belongs to l
th
vertical mode
(m s
-1
)
) , ( ~ m l
v
Horizontal velocity in induced by l
th
vertical m
th
horizontal
three-dimensional mode (m s
-1
)
b f
v
1
0
=
Friction velocity (m s
-1
)
v
Horizontal velocity vector (m s
-1
) (Chapter 2, 3) / Three-
dimensional velocity vector (m s
-1
) (Chapter 4)
) (r
k
v
Velocity vector in k
th
layer induced by rth mode (m s
-1
)
) (
~
r
k
v
Modal velocity vector in k
th
layer induced by r
th
mode (m s
-1
)
w
e
Entrainment rate (m s
-1
)
w
E
Ekman normal velocity (m s
-1
)
x Horizontal Cartesian coordinate (m)
xiv
x
Horizontal Cartesian coordinate vector (m) (Chapter 2, 3) /
Three-dimensional Cartesian coordinate vector (m) (Chapter 4)
y Horizontal Cartesian coordinate (m)
z Vertical coordinate (m)
Roman (uppercase)
A Plane area (m
2
) (Chapter 2, 3) / Aspect ratio (-) (Chapter 4)
B = f
-2
N
2
A
2
Stratification parameter (-)
C Characteristic celerity (m s
-1
)
C Linear damping operator of shallow water system
C
b
Bottom drag coefficient (-)
D Diffusion coefficient (m
2
s
-1
)
] [r
D
Rate of energy dissipation due to +r and r mode (J s
-1
)
E Total energy of the system (J) (Chapter 2, 3) / Ekman
number ( )
2 1
= H f (-) (Chapter 4)
E
(r)
Modal total energy of rth mode (J)
E
[r]
Modal total energy of +r and r mode (J)
F Energy flux (J m
-2
s
-1
)
H Total depth (m)
K Linear operator of non-dissipative shallow water system
L Horizontal length scale of a basin / length of a rectangular basin
( )
4 / 1
2
/ 2 D L
B
=
Batchelor length (m)
M Weight matrix
z
g N =
1
0
Buoyancy frequency (rad s
-1
)
O Zero matrix
R Radius of a circular basin (m)
S = c (fL)
-1
Burger number (-)
Sc = D
-1
Schmidt number (-)
T Period (s)
U Stretched horizontal velocity (m
s
-1
)
V Volume (m
3
)
W Stretched vertical velocity (m
s
-1
)
X Stretched horizontal coordinate (m)
Z Stretched vertical coordinate (m)
) (r
W
Complex rate of work done to r
th
mode (J s
-1
)
] [r
W
Rate of work done to +r and r mode (J)
Greek (lowercase)
Mass transfer coefficient (m s
-1
) (Chapter 3) / Vertical wave
number of bottom boundary layer flow (m
-1
) (Chapter 4)
) (r
Damping rate of r
th
mode (rad s
-1
)
Thickness of sublayer (m)
=
=
otherwise
j i if
j i
0
1
,
Kronecker delta
( ) x
Dirac delta function
Error or residual (various)
Dissipation rate of turbulent kinetic energy (m
2
s
-3
)
( )
( ) ( )
>
=
=
1 /
1 /
0 1
0 1
k
k
k k
k
Non-dimensional density difference across k
th
interface (-)
1
= cf
R
Rossby radius of deformation (m)
von Karman constant (= 0.41) (Chapter 3)
Kinematic viscosity (m
2
s
-1
)
xv
) (
Vertical modal structure (of pressure and horizontal velocities)
in a continuously stratified basin (-)
Volume stream function (m
2
s
-1
)
Azimuthal coordinate (rad)
(r)
Modal phase of r
th
mode (rad)
Density (kg m
-3
)
( )
T
y x
, =
Shear stress vector (N m
-2
)
Angular frequency (rad s
-1
)
State vector of motion for shallow water system
) (
~
r
Spatial modal structure of r
th
([quasi-] three-dimensional) mode
Surface/interface displacement (m)
) (r
k
Displacement in k
th
interface induced by r
th
mode (m)
) ( ~ r
k
Modal displacement in kth interface induced by r
th
mode (m)
) , ( m l
m
th
horizontal modal displacement that belongs to l
th
vertical
mode (m)
Greek (uppercase)
mix
Mixing efficiency (-)
( )
T
f 2 / 0 0 =
Local vertical angular velocity vector of Earth (rad s
-1
)
Subscripts
0 Nominal value / 0
th
order solution (Chapter 4)
1 1
st
order solution (Chapter 4)
b Bottom
e Vertical variation at the equilibrium
f Forcing
iwc Internal wave cancelling
k (>0) Layer index
m Molecular
s Surface
sp Spin-down
sw Sidewall
x x component in Cartesian coordinate
y y component in Cartesian coordinate
z Vertical component
BBL Bottom boundary layer
DSL Diffusive sublayer
E Ekman layer / Ekman normal velocity
I Far-field
SW Sediment-water interface
VSL Viscous sublayer
Superscripts
g Geostrophic mode
(l) Vertical modal index
(m) Radial modal index
(n) Azimuthal modal index
(r) Modal index for (quasi-) three-dimensional mode
(p), (q), (s) Dummy modal indices
[r] Sum of +r and -r mode
w Wave mode
L Left mode
R Right mode
xvi
+ Non-dimensionalized variable
Mathematical operators
( ) diag
Diagonal matrix (diagonal components are shown in the
argument)
( )
*
Complex conjugate
( )
T
Transpose
( )
H
Conjugate transpose (or Hermitian)
( )
Temporal average
, , , , ,
r z y x t
Partial derivative with respect to the variable in the subscript
(various)
Horizontal differential operator (m
-1
) (Chapter 2, 3) / Three-
dimensional differential operator (m
-1
) (Chapter 4)
( )
= dA
H
' ' ,
Inner product
xvii
Acknowledgements
Looking back the beginning of this journey, it was a fortunate coincidence I came to
CWR. I wanted to study overseas I wanted to do research that contributes to scientific
understanding and to write international papers. I found a new Japanese government
scholarship starting from 2005 few days after the deadline, but there was no one who
had applied for it and N. Tsutsumida at Tokyo Institute of Technology kindly accepted
my late application. I knew of CWR as T. Ishikawa, my supervisor in my Masters, had
long-term collaboration with CWR, and I was accepted by CWR probably because of
his recommendation.
I could not have achieved this milestone without the continuous encouragement and
support of my supervisor, Jrg Imberger. I worked hard as I knew my scholarship was
only for three years from the beginning, but I would not have been able to finish my
PhD in three years and a few months without his hard work and patience, particularly
for last few months. I have achieved what I aimed thanks to Jrg he accepted and
extended my ideas (I was told originality was not appreciated in Japan!) and helped me
out writing the ideas down in papers in English. I am happy to have had at least a
glimpse into world-leading research. I also thank Jrg for giving me opportunities to
travel to Kenya and South America, where I had never imagined visiting.
I appreciate collaboration with Dr. Kumagai and Dr. Jiao at Lake Biwa
Environmental Research Institute, who kindly provided bathymetry, meteorological
data, and water quality data from Lake Biwa during the first part of my study. They also
contributed to the study through discussion on formation mechanisms of the gyres.
I am grateful for valuable and helpful discussions with S. Morillo, P. Okely, P.
Yeates, A. Gmez-Giraldo, A. de la Fuente, A.M. Simanjuntak, K. Nakayama, T.
Shintani, and J. Antenucci. I hope I helped them as much as they helped me.
Particularly, discussion with A. Gmez-Giraldo on preliminary ideas of the modal
analysis encouraged me in developing the theory, and tough questions from A. de la
Fuente on the theory contributed making it clearer. P. Okely helped me a lot by
correcting my English in the early stage of my writing the first paper (how many articles
she corrected before Jrg read the draft!). I thank J. Antenucci, C.J. Dallimore, A.
Gmez-Giraldo, T. Johnson, P. Okely, T. Shintani, and anonymous reviewers of the
first two papers for reading the manuscripts of my papers and giving me constructive
xviii
and critical comments. R. Alexander, I. Hillmer, P. Okely, and J. Petruniak gave me
valuable comments on my final thesis presentation.
Support of staff and friendship of students in CWR and SESE made my study really
enjoyable. Playing sports and having fun together plus a bit of (a lot of?) distraction
from my work were great help to me, as I tend to work far too much when I push
myself. I particularly thank A.M. Simanjuntak for helping me out to settle in CWR and
Perth and my officemates P. Yeates, S. Morillo, A. de la Funte, C. Boon, P. Okely,
and P. Huang for being tolerant for me talking to myself loudly while I was
programming and solving equations! (Actually, I dont have to thank A. de la Funte as
everyone agrees that he was much noisier than me haha!)
Finally, to my friends, housemates, and family thank you very much for supporting
me during this long tough journey!
I appreciate financial support of Japanese Government (MEXT) scholarship, Tokyo-
Tech Long Term Overseas Study Support Program, and ad-hoc CWR scholarship.
xix
Preface
This work was completed during the course of my enrolment for the degree of
Doctor of Philosophy at the Centre for Water Research (CWR), The University of
Western Australia. The main body of this thesis (Chapter 2 to Chapter 4) is a
compilation of three papers written for journal publication. Each chapter is a stand-
alone manuscript, which includes abstract, literature review, methods, results,
discussion, and conclusions. The introductory Chapter 1 presents the motivation for this
study and links the following three chapters. The major outcomes of this work are
summarized in Chapter 5 followed by recommendations for future work.
Chapter 2 has been published in Limnology and Oceanography as Shimizu, K., J.
Imberger, and M. Kumagai. 2007. Horizontal structure and excitation of primary
motions in a strongly stratified lake. Limnol. Oceanogr. 52: 2641-2655. The processing
of field data and three-dimensional modeling was conducted by myself under
supervision of Jrg Imberger, and the theory of modal analysis and numerical scheme
for modal computation were developed by myself. Jrg Imberger also checked scientific
integrity of the research and edited the manuscript thoroughly, which was originally
written by myself. Michio Kumagai contributed to the work through provision of field
data and discussion on dynamics and formation mechanisms of gyres.
Chapter 3 is in press by Limnology and Oceanography as Shimizu, K., and J.
Imberger. Energtics and damping of internal waves in a strongly stratified lake. Jrg
Imberger suggested the original idea of extracting internal wave modes from thermistor
chain data, and I developed a method to fit numerically computed modes based on the
modal amplitude equations with estimating the damping rates. All the data processing,
modal calculation, and mode fitting were done by myself. The manuscript was
originally written by myself and edited by Jrg Imberger.
Chapter 4 is to be submitted to Journal of Fluid Mechanics as Shimizu, K., and J.
Imberger. Damping mechanisms of internal waves in a continuously stratified rotating
basin. Jrg Imberger identified the problem of how gravity waves are damped by thin
boundary layer without momentum diffusion during the work presented in Chapter 3.
He then suggested solving the problem using the perturbation method. I obtained the
understandings of the damping mechanism referred to as internal wave canceling by
following previous studies, and further combined it with the spin-down process to
xx
extend the analyses to a stratified rotating basin. All the mathematical derivations and
writing were originally done by myself and checked by Jrg Imberger.
I have the permission of all the co-authors to include the above manuscripts in my
thesis.
Kenji Shimizu Jrg Imberger
(Coordinating supervisor)
Chapter 1. Introduction
1
Chapter 1. Introduction
1.1 Motivation
Modal analysis has been a useful standard tool in vibration problems of particles and
solid bodies. These systems have natural periods of oscillation and the associated
distinct spatial structure inherent to the system, called modes, satisfy general orthogonal
relationships. Use of modes and their orthogonality reduces the original coupled
problem of multi-degree of freedom (or partial differential equations) into a set of
decoupled modal amplitude equations for individual modes that are equivalent to the
governing equation for a single harmonic oscillator (e.g., Timoshenko et al. 1974). The
method is applicable even for large number of particles or solid bodies with complicated
shape, where analytic solutions are difficult to obtain, as the theory is applicable to
numerically computed modes. Spatial and temporal effects of forcing are also separated
in this method: spatial correlation between forcing and modal structure determines the
effectiveness of the forcing exciting the mode, expressed as a modal force term,
whereas the modal amplitude equations (with the modal force term) describe temporal
interactions between each mode and the forcing, including excitation, canceling
(Mortimer 1953), phase shift (Raudsepp et al. 2003; Gmez-Gilaldo et al. 2006), and
resonance (Antenucci and Imberger 2003; Gmez-Giraldo et al. 2006), all of which
have been observed in stratified lakes and semi-enclosed seas. By separating total
motion into modal components and effects of forcing into spatial and temporal factors,
modal analysis provides conceptual and general understandings of linear dynamics of
such systems that are not easily obtainable from experiments or numerical simulations.
It is well known that this method can be applied to fluid motions in non-rotating
semi-enclosed shallow basins (e.g., Lamb 1932), such as small lakes. Application of
linear modal analysis is often beneficial as fluid motions in a geophysical scale are often
well described by linear theory (e.g., Csanady 1975). Although less attention has been
paid recently, the method can be extended to stratified rotating basins. Orthogonality of
the modes was shown by Proudman (1929) for homogeneous rotating shallow basins,
and Platzman (1972, 1975, 1984) applied modal analysis to numerically compute tides
in the world ocean. Numerical schemes to calculate modes in stratified basins with
Application of modal analysis to strongly stratified lakes
2
arbitrary shape have been proposed, for example, by Schwab (1976) and Buerle
(1985). However, the theory has not been well developed for stratified rotating basins.
This thesis is aimed to obtain better and unified understandings of basin-scale
motions in stratified rotating lakes using modal analysis. This purpose was achieved by
extending the theory to both layer- and continuously stratified rotating basins with
arbitrary shape. One of the advantages is that the method provides general and relatively
simple framework to understand dynamics of basin-scale motions in real lakes through
numerical computation of modes, unlike analytical studies where the basin shape needs
to be simplified. Another advantage is the orthogonality of modes that enables us to use
generalized Fourier series for theoretical study and to extract modal components from
simulation results and field data, providing new tools for theoretical, numerical, and
field studies. These points will be illustrated in the following chapters.
1.2 Overview
Following this brief introduction are three chapters where theory of modal analysis
for both layer- and continuously stratified lakes are developed and applied to better
understand evolution, excitation, energetics, and damping of basin-scale motions in
stratified rotating lakes, and the implications on mass transport processes.
Excitation of basin-scale motions was investigated in Chapter 2 by extending the
theory of modal analysis to layer-stratified basins with arbitrary bathymetry. The
shallow water equations were reduced to modal amplitude equations that describe
evolution of individual modes forced by wind stresses. It was shown that winds excited
modes that had similar horizontal velocity structure in the surface layer compared to the
wind stress pattern. Numerically calculated modes were then used to show how winds
preferentially excited certain modes in basins with irregular shape. Evolution of modes
was extracted from results of three-dimensional hydrodynamic simulation results in
order to assess applicability of the linear modal analysis to basin-scale motions in lakes.
Damping was neglected in this chapter.
In Chapter 3, the theory was extended to include linear damping and then applied to
estimate energetics and damping rates of basin-scale internal waves from thermistor
chain data. The results indicated that basin-scale internal waves were damped within a
few periods. Bottom friction was considered as a primary cause of the fast damping,
Chapter 1. Introduction
3
although it was not clear how bottom friction confined within a thin boundary layer was
able to damp internal waves quickly. The estimated near-bottom current velocities were
also used to estimate spatial variability of near-bottom mass transfer processes.
To answer the question about fast damping of basin-scale internal waves, the
damping processes were analytically investigated in Chapter 4. The damping
mechanism was understood as a combination of two fast damping mechanisms: waves
generated by oscillatory boundary layers cancelling the parent wave (Johns 1968; Mei
and Liu 1973) and the well-known spin-down (Greenspan 1968; Pedlosky 1979; Gill
1982) modified by the periodicity. The theory of modal analysis was extended to a
continuously stratified basin, and applied to flat-bottomed rectangular and circular
basins in this chapter.
Major conclusions obtained in these studies and recommendations for future work
are summarized in Chapter 5.
Application of modal analysis to strongly stratified lakes
4
Chapter 2. Horizontal structure and excitation of primary motions
in a strongly stratified lakes
Abstract
A modal analysis in the horizontal plane was extended to a layer-stratified basin
with irregular bathymetry, and the theory was applied to Lake Biwa to investigate the
horizontal structure and excitation of the basin-scale internal waves and gyres. The
horizontal structure of the basin-scale internal waves consisted of cyclonic and
anticyclonic elliptic cells, each of which appeared to follow the dispersion relationship
of Kelvin and Poincar waves in elliptic basins. The internal waves were preferentially
excited depending on the arrangement of the cells and the wind direction, but the
spatial distribution of wind stress curl over the lake primarily determined the horizontal
structure of the ensuing gyres. Decoupled evolutionary equations for the individual
modes provided a good approximation for excitation of the internal waves and early
stages of excitation of the gyres before non-linear effects and damping become
significant. The modal decomposition of hydrodynamic simulation results also showed
that the primary action of the wind was to excite the internal waves; however, these
internal waves were damped within a few days and the dynamics during calm periods
were dominated by the gyres, illustrating the importance of internal waves on mixing
and gyres on long-term horizontal transport.
2.1 Introduction
Motions in a lake are primarily energized by surface wind stresses. Wind excites
primary motions including seiches, basin-scale internal waves and gyres, which in turn
cause secondary motions, such as high-frequency internal waves and residual
circulation (Imberger 1998; Okely and Imberger 2007). The spatial structure and
amplitude of these motions have important implications for chemical and biological
processes in lakes since they determine the flux path of biogeochemical substances
(e.g., Nishri et al. 2000; Eckert et al. 2002). Understanding of the spatial structure and
excitation of primary motions provides the foundations for the understanding of
subsequent physical, chemical, and biological processes.
Published as: Shimizu, K., J. Imberger, and M. Kumagai. 2007. Horizontal structure and excitation of
primary motions in a strongly stratified lake. Limnol. Oceanogr. 52: 2641-2655. Centre for Water
Research Reference ED 2116-KS.
Chapter 2. Horizontal structure and excitation of primary motions
5
The horizontal structure of basin-scale internal waves may conveniently be
visualized in terms of fundamental mode Kelvin and Poincar waves in flat-bottomed
circular or elliptic basins (Antenucci and Imberger 2001). A Kelvin wave has a
subinertial frequency and propagates cyclonically around the basin (counterclockwise in
Northern Hemisphere and clockwise in Southern Hemisphere), and it has a horizontal
structure that depends on the Burger number ( )
1
= fL c S , where c is the celerity, f the
Coriolis parameter, and L the horizontal length scale (Antenucci and Imberger 2001).
When the Burger number is small, the interface displacement and velocity are largest at
the boundary and decay exponentially offshore with a length scale given by the Rossby
radius of deformation
1
= cf
R
(Antenucci and Imberger 2001). When the Burger
number is large, the frequency becomes superinertial, and the horizontal structure
approaches that of a Poincar wave (Antenucci and Imberger 2001). (Although the
name, Kelvin wave, is not assigned to superinertial cyclonic waves, we shall use the
name in this paper for the fundamental mode cyclonic wave.) A Poincar wave
propagates anticyclonically (clockwise in Northern Hemisphere) with a maximum
velocity in the middle of the basin and zero velocity at the boundary (Antenucci et al.
2000).
In real basins, irregular bathymetry modifies the horizontal structure of a Poincar
wave by localizing the wave (Wang et al. 2000) or by introducing an accompanying
cyclonic cell (Gmez-Giraldo et al. 2006); whereas the horizontal structure of a Kelvin
wave appears insensitive to basin irregularities (Mortimer 1974; Gmez-Giraldo et al.
2006). Recently Gmez-Giraldo et al. (2006) analysed an internal wave consisting of an
anticyclonic cell and a cyclonic cell in Lake Kinneret and suggested that the cells were
governed by the dispersion relationship of Poincar and Kelvin waves, respectively, in a
circular (or elliptic) basin.
Excitation of basin-scale internal waves depends on both the temporal and spatial
variations of the wind forcing. Analytical solutions of internal waves excited by a
suddenly imposed wind show that the amplitudes increase in the first half of the wave
period, reach a maximum after half the period and then decrease in the second half
period (e.g., Birchfield 1969; Stocker and Imberger 2003). Field and modelling studies
indicate that excitation or cancellation of an internal wave depends on the phase
between the wave and the wind (Mortimer 1953; Antenucci et al. 2000; Rueda et al.
Application of modal analysis to strongly stratified lakes
6
2003), and that winds not only excite internal waves but also shift their observed phase
due to generation of additional internal waves (Gmez-Giraldo et al. 2006). The
effectiveness of winds in excitation or cancellation also depends on the spatial
distribution of the wind stress field over the lake and the horizontal structure of internal
waves; however, this interplay is not well understood in an irregular basin.
Unlike basin-scale internal waves that are excited directly by wind, gyres may be
excited by wind stress curl (Emery and Csanady 1973; Endoh 1986), topographic
effects (Csanady 1973), residual current resulting from internal waves (Ou and Bennett
1979), and thermal effects (Huang 1971; Schwab et al. 1995). Although thermal effects
can be important on a seasonal timescale (Schwab and Beletsky 2003; Akitomo et al.
2004), recent studies indicate that, for timescales shorter than seasonal, wind stress curl
and topographic effects are the major driving forces of gyres (Laval et al. 2003, 2005;
Rueda et al. 2005) and that the contributions from internal waves are minor (Pan et al.,
2002). We will limit our focus to wind-driven gyres in this paper.
The spatial structure of wind-driven gyres depends strongly on the spatial
distribution of the wind (Pan et al. 2002) and bathymetry (Csanady 1973). Theoretical
analysis of flat basins without the variation of the Coriolis parameter (the f -plane)
indicates that the horizontal structure of gyres is determined by external forcing
(Proudman 1929; Gill 1982). Variations in depth induce a topographic gyre due to
larger specific momentum input in a shallow coastal region compared to that in deeper
regions (Csanady 1973). A topographic gyre degenerates primarily into topographic
waves after the wind ceases (Raudsepp et al. 2003), and propagates cyclonically around
the basin with the periods and horizontal structure determined primarily by the basin
shape and bottom slope (Rhines 1969). In strongly stratified lakes, currents associated
with gyres are observed only in the epilimnion, and the geostrophic pressure associated
with the circulation induces doming (or depression) of the pycnocline (Endoh et al.
1995a; Kumagai et al. 1998; Laval et al. 2005).
Lake Biwa is the largest lake in Japan, consisting of the relatively deep North Basin
and shallower South Basin. This lake will be used to illustrate the theoretical
developments made in this paper, as several basin-scale internal waves and a gyre
system consisting of two or three gyres have previously been identified. The dominant
internal wave is the vertical and horizontal mode 1 Kelvin wave (Kanari 1975), and
Chapter 2. Horizontal structure and excitation of primary motions
7
second, third, and fourth horizontal mode basin-scale internal waves have also been
observed after strong winds (Saggio and Imberger 1998). The largest and most
persistent cyclonic gyre in the north of the North Basin (First Gyre) is often
accompanied by an anticyclonic gyre in the middle of the basin (Second Gyre) both of
which induce circular currents with a characteristic water velocity of 0.1 m s
-1
(Endoh
and Okumura 1993). An unstable cyclonic gyre has also been found in the south of the
North Basin (Third Gyre), and long-term current measurements have shown that the
locations and the number of gyres change on a seasonal timescale (Kumagai et al.
1998). It has not, however, been shown why the internal waves of higher horizontal
modes are excited and what determines the horizontal structure of the gyres.
The purpose of this paper is to obtain a better and more comprehensive
understanding of the spatial structure and excitation of internal waves and gyres by
using a modal analysis in the horizontal plane. This technique has been previously used
to analyse the horizontal structure of tides and seiches in homogeneous basins
(Platzman 1972; Rao and Schwab 1976) and internal waves in stratified basins (Buerle
1985, Lemmin et al. 2005). However, the analysis also enables us to derive a set of
decoupled evolutionary equations for the individual modes (e.g., Proudman 1929;
Lighthill 1969; Platzman 1984) that describe the effects of winds on the primary
motions. Simulations with the three-dimensional hydrodynamic model ELCOM
(Estuary, Lake and Coastal Ocean Model, Hodges et al. 2000; Laval et al. 2003;
Simanjuntak et al. Submitted) are also used to confirm the results obtained from the
semi-analytical modal analysis.
This paper is structured as follows. First, the field data used in this paper will be
briefly described. Second, we will describe the extension of the theory of modal
analysis in the horizontal plane to a layer-stratified basin and demonstrate its application
to Lake Biwa. Third, we will illustrate how the modal components can be extracted
from the results of the three-dimensional hydrodynamic simulations to confirm the
results of the modal analysis. Finally, we will discuss some implications of the results
for a strongly stratified lake in general.
Application of modal analysis to strongly stratified lakes
8
2.2 Field Data
This study uses field data collected in 1993 and 1994 for wind speed and direction,
temperature profile, and velocity structure in the water column in Lake Biwa. Wind data
were measured at five land-based stations around the lake by the Automated
Meteorological Data Acquisition System (AMeDAS; managed by Japan Meteorological
Agency) and at BN50 during Biwako Transport Experiment (BITEX93; 21 Aug -16
Sep 1993) (Fig. 2.1). Since the wind speed measured at land-based stations was
considerably lower than that measured at BN50, the wind speed measured at the land-
based stations were correlated to the wind speed at BN50 and then corrected by
multiplying by a factor of 2.5. Temperature profiles were measured by a thermistor
chain at BN50 during BITEX93 and as part of biweekly routine measurements at Sta.
17B in 1994 (Fig. 2.2). The thermistor chains had 20 thermistors spaced every 1 m in
the thermocline, extending up to 5 m apart near the surface and the bottom where the
stratification was weaker (see Saggio and Imberger [1998] for details). Vertical profiles
of water velocity were measured by a shipboard broad-band acoustic Doppler current
profiler (ADCP) on a monthly basis in 1994 along 11 transects in W-E direction,
covering the whole North Basin (see Kumagai et al. [1998] for details).
Chapter 2. Horizontal structure and excitation of primary motions
9
N
36.45 N
135.90 E
Imazu
Hikone
Ohtsu
Torahime
Minami Komatsu
Shiozu bay
BN50
Land-based meteorological
Thermistor chain & wind sensor
* contour line every 10 m
Sta.17B
Routine temperature profiling
a)
A
b) Plan view of computational grid in A
c) Computational grid along
B-B (modal analysis)
d) Schematic computational grid
along B-B (ELCOM)
,h
u
v
w
B B
S
o
u
t
h
B
a
s
i
n
N
o
r
t
h
B
a
s
i
n
5 0 10
km
15
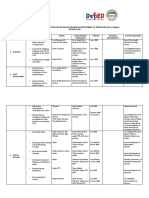
Fig. 2.1. Bathymetry of Lake Biwa and computational grids: (a) bathymetry of Lake Biwa and
locations of measurement stations, (b) magnified plan view of computational grid in A (common for
both the modal analysis and ELCOM simulations), (c) computational grid along cross-section B-B
used for the modal analysis, and (d) schematic computational grid along cross-section B-B used for
the ELCOM simulations (vertical grid resolution is finer than the schematic). Thin and thick lines
in panel (a) show bathymetry contour with 10-m interval and horizontal boundaries of
computational grid at the surface and 18-m deep, respectively. The dashed line indicates a
boundary between the northern and southern halves that are used for the calculation of spatially
averaged wind stress and its curl (see Fig. 2.7).
Application of modal analysis to strongly stratified lakes
10
5 10 15 20 25 30
0
10
20
30
40
50
60
70
80
90
100
Temperature (C)
D
e
p
t
h
(
m
)
25 Aug 1993
20 Jun 1994
18 Jul 1994
2 layer (1993)
Fig. 2.2. Temperature profiles used for the modal analysis and the hydrodynamic simulations. The
profiles in 1993 and 1994 were measured at BN50 and Sta. 17B, respectively. For the modal
analysis with two-layer stratification, the depth of the interface was set to 18 m (corresponds to
maximum buoyancy frequency).
2.3 Theory of modal analysis
2.3.1 Basic equations and solutions
The modal analysis used in this paper is based on the linearized shallow water
equations for a layer-stratified system with the Boussinesq and hydrostatic
approximations (e.g., Monismith 1985; Lemmin et al. 2005). For an incompressible
fluid in a two-layer system, multiplying the equation of conservation of mass for the
upper (lower) layer by the acceleration due to gravity (reduced gravity) and including
layer thickness in the equations of motion gives:
( ) ( ) ( ) t k x t k x i t k x
t
, , , , , ,
f K M + =
(2.1)
where
( ) ( )
T
v v t k x
2 1 2 1
, ,
=
(2.2)
is the state vector of motion,
( ) ( )
T
s
t k x 0 0 0 , ,
= f
(2.3)
is the external force vector,
Chapter 2. Horizontal structure and excitation of primary motions
11
( )
|
|
|
|
|
\
|
=
2 2 2 1 2
1 1 1
2 2
2 1 1 1
0
2 0
0 2 0
0 0 0
0 0
,
h g h g h
h g h
h g
h g h g
i k x
K
(2.4)
is the linear operator of the shallow water system,
( )
|
|
|
|
|
\
|
=
2
1
2
1
0
0 0 0
0 0 0
0 0 0
0 0 0
,
h
h
g
g
k x
M
(2.5)
is the weight matrix, t is the time, ( )
T
y x x , =
represents the horizontal coordinates, k
( 1, 2 = ) is the layer index, is the surface or interface displacement, ( )
T
v u v , =
are the
layer-averaged velocities, g is the acceleration due to gravity, h is the layer thickness,
( )
T
f 2 / 0 0 =
is the local vertical angular velocity due to Earths rotation, f is the
Coriolis parameter, ( )
T
sy sx s
, =
are the surface stresses, is the density,
0 1 1
/ =
and ( )
0 1 2 2
/ = are the non-dimensional density differences across the surface and
interface, respectively, 1 = i is the imaginary unit,
t
is the temporal differential
operator, and ( )
T
y x
= , is the two-dimensional horizontal differential operator.
Subscripts 1 and 2 denote the upper and lower layers respectively, subscript 0 denotes a
reference value, superscript T stands for the transpose and bold face is used to denote
mathematical vectors and matrices.
Multiplying Eq. 2.1 by
1
M yields an equation with the Laplaces (tidal) operator
used by Platzman (1972) and Buerle (1985); however, we choose to retain M for
convenience as shown below. The boundary condition on each layer is given by zero
volume flux normal to the boundary:
( ) 0 =
k k k
n v h
(2.6)
where n
is the normal vector to the boundary.
Application of modal analysis to strongly stratified lakes
12
Assuming basin-scale coherent motion and no external forcing, separation of
variables of the form
t i
e k x t k x
) , (
~
) , , (
= converts Eq. 2.1 into a generalized
eigenvalue problem:
K M
~ ~
=
(2.7)
Solutions to Eq. 2.7 include linearly independent solutions of the form:
( ) ( )
t i
r
r
e k x t k x
) (
,
~
, ,
) (
=
(2.8)
where ( )
T
r r r r r
v v
) (
2
) (
1
) (
2
) (
1
) (
~ ~
~ ~
~
= are the spatial modal structure and
) (r
are the
natural angular frequencies, and ( ) r in the superscript are the modal indexes (note that
the absolute value of
) (
~
r
are arbitrary since they are eigenfunctions; a tilde denotes
variables whose magnitude depends on the normalization factor (
) ( ~ r
e in Eq. 2.15)
throughout this paper). Corresponding to every solution in Eq. 2.8, there is a conjugate
solution whose spatial modal structure and natural angular frequency are given by
*
) (
~
r
and
) (r
, where * stands for the complex conjugate.
Solutions of Eq. 2.7, with the boundary condition Eq. 2.6, consist of four classes of
modes: Gravity modes, vorticity modes, geostrophic modes, and quiescent modes
(Platzman 1975; Rao and Schwab 1976). The first three modes correspond to primary
motions, while quiescent modes are associated with spatially uniform change of the
surface or interface level and induce no motion. Gravity modes consist of surface waves
(seiches) and internal waves, both being in a balance (to the first approximation)
between gravity and inertia, and vorticity modes include planetary Rossby waves and
topographic waves, where the Coriolis force balances inertia. Geostrophic modes
represent steady circulation that are in geostrophic balance and evolve under external
forcing. Although geostrophic modes do not appear in a rotating homogeneous basin
with variable depth (Platzman 1975), they are supported in a stratified basin if the
variation of the Coriolis parameter is neglected, as may be shown as follows.
Assuming steady state and no forcing, we may take the curl of the equations of
motion Eq. 2.1, which yields:
Chapter 2. Horizontal structure and excitation of primary motions
13
( ) ( ) 0 / /
1 1 1 1 1
= = v h f f g h f
(2.9)
and
( ) ( ) ( ) 0 / /
2 2 2 2 1 1 2
= = + v h f f g g h f
(2.10)
where the geostrophic balance between the pressure gradient and Coriolis force is used
to derive the second expression. These equations form the conditions for the existence
of geostrophic modes. If the variation of the Coriolis parameter is neglected, the layer
thickness must be constant for any surface or interface displacement (hence velocity) to
retain a degree of freedom. Although this condition is not satisfied in the lower layer
and the coastal zone of the upper layer where the water column is not stratified,
geostrophic modes do exist in the upper layer of a lakes interior where 0
1
= h . If the
variation of the Coriolis parameter (the -effect) is included, a gradient of potential
vorticity converts such geostrophic modes into Rossby waves.
2.3.2 Some property of modes
The modes discussed above have some useful properties. To see this, consider the
inner product:
, ' '
H
dA =
(2.11)
where the superscript H stands for the conjugate transpose, the prime denotes different
state of motion and the integral is taken over the whole domain. As shown in Appendix
2.A, the operator K , along with the boundary condition (Eq. 2.6), is Hermitian (or self-
adjoint):
', ', = K K
(2.12)
This property leads to the orthogonality of modes unless modes are degenerate, or more
than one mode has the same natural angular frequency (Proudman 1929),
( ) ( ) ( )
,
,
r s r
r s
e = M
(2.13)
( ) ( ) ( ) ( )
,
,
r s r r
r s
e = K
(2.14)
Application of modal analysis to strongly stratified lakes
14
where
s r,
is the Kronecker delta and
) ( ~ r
e is twice the total energy of the r
th
mode
when the amplitude of the mode is unity:
( )
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
0 1 1 1 2 2 2 1 1 1 2 2 2
, , , ,
r r r r r r r r r
e g g v h v v h v = + + +
(2.15)
Another useful property is the completeness. Any analytic state vector may be
expressed in a convergent series of the form
( ) ( ) ( )
+
=
=
r
r r
t a k x t k x
) ( ) ( ~
,
~
, ,
(2.16)
where
) ( ~ r
a is the complex modal amplitude of r
th
mode that can be calculated from:
(Proudman 1929)
( ) ( ) ( )
( ) ( ) 1 ( )
, , , ,
r r r
a t e x k x k t
= M
(2.17)
The absolute value
) ( ~ r
a and angle
( ) r
, defined as
( )
( ) ( )
( ) ( )
( )
( ) 1
( )
Im
tan
Re
r
r
r
a t
t
a t
| |
|
=
|
\
(2.18)
determine the amplitude and phase of the mode, respectively. The completeness means
that the series expansion (Eq. 2.16) is convergent in the weighted square mean sense:
( ) ( )
( )
1
2
r
r
E t E t
+
=
= =
, M
(2.19)
where E is the total energy of the system, and
( ) ( )
2
) ( ) ( ) ( ~ ~
2
1
t a e t E
r r r
=
(2.20)
the modal total energy of r
th
mode.
2.3.3 Decoupled dynamic equations of individual modes
The orthogonality of modes enables us to derive a set of decoupled evolutionary
equations for each mode as was shown by Lighthill (1969) and Timoshenko et al.
(1974). For our case, this may be achieved by substituting the series expansion (Eq.
Chapter 2. Horizontal structure and excitation of primary motions
15
2.16) to Eq. 2.1, changing the modal index from r to s , taking the inner product with a
particular mode
) (
~
r
, and using the orthogonality (Eqs. 2.13 and 2.14). This yields:
( ) ( ) ( ) t f t a e i t a e
r r r r r
t
r ) ( ) ( ) ( ) ( ) ( ) (
~
~ ~ ~ ~
+ =
(2.21)
where the modal force
) (
~
r
f is defined by:
( ) ( ) ( ) ( ) ( )
( ) ( ) ( )
1
, , , , , ,
r r r
s
f t x k x k t v x x t = = f
(2.22)
Since
) (r
is constant and
) ( ~ r
a and
) (
~
r
f are functions of time only, Eq. 2.21 is a first
order ordinary differential equation, and the solution may easily be found. In order to
show the effects of wind forcing on primary motions, let us further derive the
evolutionary equations for the modal energy and phase. Writing
) (
) ( ) ( ~ ~
r
i
r r
e a a
= in Eq.
2.21, taking the temporal derivative on the LHS, multiplying by
) (
) ( ~
r
i
r
e a
, separating
real and imaginary parts, and dividing the imaginary part by
) (
2
r
E , we find the
evolutionary equations of modal energy and phase:
( ) ( ) ( ) t W t E
r r
t
) ( ) (
Re
=
(2.23)
( ) ( ) ( ) ( ) t E t W t
r r r r
t
) ( ) ( ) ( ) (
2 Im
+ =
(2.24)
where
) (r
W
is the complex (in mathematical sense) rate of work done by the wind on the
r
th
mode
( ) ( ) ( ) ( ) ( )
( ) ( )* ( ) ( )
1
, , ,
r r r r
s
W t a t f t v x t x t = =
(2.25)
and
) (
1
r
v
the average velocity in the upper layer induced by the r
th
mode. Eqs. 2.20 and
2.23-2.25 provide a general framework for the effects of wind stress on each mode.
First, note that
) (
1
r
v
is a complex variable whose real and imaginary part that represents
the velocity field at the present time and a quarter period before the present time,
respectively (e.g., if the middle panel in Fig. 2.3a-d is assumed to represent the real part,
then right panel shows -1 times the imaginary part). If
) (
1
r
v
and
s
are parallel
everywhere,
) (r
W
is real and the wind excites (or cancels) the mode when they are in
Application of modal analysis to strongly stratified lakes
16
the same (opposite) direction (Eqs. 2.23 and 2.25). On the other hand, when the upper
layer velocity and wind stress are normal to each other everywhere,
s
and the
imaginary part of
) (
1
r
v
are in the same (opposite) direction (hence
) (r
W
is imaginary)
and the wind accelerates (decelerates) the phase evolution (Eqs. 2.24 and 2.25).
It is worthy to note that the decoupling shown above is possible in a basin with
arbitrary bathymetry, once modes have been obtained either analytically or numerically.
Further, these results obtained for a two-layer basin hold in general, as shown in
Appendix 2.A.
2.4 Modal analysis of Lake Biwa
2.4.1 Numerical method
To apply the modal analysis to irregularly shaped Lake Biwa, Eq. 2.7 was discretized
and solved numerically. A rectangular grid with horizontal spacing of approximately
460 m 570 m was used with surface and interface displacements defined in the
middle of each grid and velocity components defined on each face in the direction of the
velocity (staggered or Arakawa C-grid; see Fig. 2.1b). A finite difference method is
used for the discretization, and the Coriolis force term was discretized with the method
suggested by Platzman (1972) to keep the discretized operator K Hermitian, which was
important in order to retain the orthogonality and completeness of modes in the discrete
space. Based on the thermistor chain data collected during BITEX93 (Fig. 2.2), the
thermocline depth and density difference were set to 18 m and 2.27 kg m
-3
, respectively.
The phase of all the waves was arbitrarily set to zero when the total volume transport of
water in upper layer was from north to south.
Unlike previous studies (Buerle 1985; Lemmin et al. 2005), regions shallower than
the thermocline were included in the calculation. Wherever the interface intersected the
bottom, the volume flux normal to the horizontal boundary in the lower layer was set to
zero (the boundary was assumed locally vertical; see Fig. 2.1c), and continuity of
displacements and volume fluxes were applied to the upper layer. Since the method
assumes infinitely small amplitude, the boundary condition applied to the lower layer
was essentially same as the method used by Buerle (1985) and Lemmin et al. (2005),
who assumed a vertical wall along the line where the thermocline intersects the bottom
Chapter 2. Horizontal structure and excitation of primary motions
17
and neglected the shallow coastal regions. Note that the inclusion of the shallow regions
did not affect the self-adjointness of K and properties of the associated modes (see
Appendix 2.A).
Table 2.1. Some characteristics of the internal waves and gyres in Lake Biwa. Some of the
topographic waves and surface waves (seiches) are also included to illustrate the spectrum of the
modes. The surface and internal waves are numbered in decreasing order of their natural periods,
while the geostrophic gyres are numbered in the opposite order. No number is assigned to
topographic waves.
Abbreviations are HM: horizontal mode, PE: percentage of the available potential energy to the
total energy,
[ ] r
E
: mean modal total energy in the hydrodynamic simulation during BITEX 93, GS:
geostrophic gyre (calculated as Rossby wave in the upper layer), TW: topographic wave, IW:
(vertical mode 1) internal wave, SW: surface wave (seiche), CG: cyclonic gyre, AG: anticyclonic
gyre, CC: cyclonic cell, AC: anticyclonic cell, NL: nodal line, NB: North Basin, N: north, S: south,
and M: middle.
Inertial period is 20.7 h.
Calculated as the ratio of sum of the first two terms in Eq. 2.15 to
sum of all the terms.
#
The sign [r] in the superscript indicates the sum of the conjugate pair, which
have positive and negative angular velocity with the same magnitude and the same modal structure.
References in the last column indicate the report of similar structure.
Data sources are 1) Endoh (1986), 2) Endoh and Okumura (1993), 3) Kumagai et al. (1998), 4)
Kanari (1975), 5) Saggio and Imberger (1998), 6) Endoh et al. (1995a), 7) Okamoto and Endoh
(1995), and 8) Kanari (1974). All data except 8) are based on field observation during summer,
while 8) is based on a two layer model where the depths of the North and South Basin are taken as
50 m and 5 m, respectively.
Class HM
Period
this study
Period
other
study
PE
(%)
[ ] r
E
#
(GJ)
Horizontal structure
1 6.8 yr - 6.7 2.56
1 CG in N of NB, corresponding to the First
Gyre
1,2,3
2 9.0 yr - 4.3 0.95 A pair of CG and AG in N of NB
3 10.0 yr - 2.5 0.27 3 CGs in N and M of NB, and 1 AG in S of NB
GS
4 11.1 yr - 1.8 0.19 2 CGs and 3 AGs
- 4.97 yr - 0.2 0.04 1 gyre in NW coast of NB
TW
- 4.70 day - <0.1 0.09 2 gyres in SE coast of NB
1 42.1 h 45
4
, 46 h
5
54 3.83 Kelvin wave
4,8
2 23.9 h 23 h
5
53 2.64 2 CCs
8
, resonance in Shiozu Bay
7
3 18.6 h - 50 1.23 2 CCs, resonance in Shiozu Bay
7
4 15.3 h 16 h
5
46 2.10 3 CCs
8
5 11.9 h 12 h
5
49 0.98 4 CCs
6 10.5 h 11 h
6
43 1.92 1 AC in N of NB and 3 CCs
7 9.6 h - 48 0.35 1 AC in N of NB and 5 CCs
IW
8 8.7 h - 42 1.05 2 ACs in N and M of NB, and 2 CCs in S of NB
1 220 min 270 min
8
50 0.02 1 NL in S end of NB
8
SW
2 62.1 min 78 min
8
50 <0.01 2 NLs in M of NB and SB
8
Application of modal analysis to strongly stratified lakes
18
Although the variation of the Coriolis parameter has, in general, a minor effect in
lakes of the size of Lake Biwa, it was nevertheless included in order to avoid
degeneracy of geostrophic modes in the numerical solution; the geostrophic gyres thus
appeared as Rossby waves. However, we prefer to call these modes geostrophic gyres
in this paper because they correspond to quasi-steady geostrophic circulation in
practical terms, as their periods (Table 2.1) are much longer than both the inertial period
and the estimated damping timescale of the gyres (10-20 d) (Endoh 1986).
2.4.2 Horizontal structure and excitation of internal waves
The vertical mode 1, horizontal mode 1 (hereafter V1H1) internal wave was a Kelvin
wave that rotated cyclonically around the basin, the largest interface displacement
occurred at the northern and southern ends, and the water velocity was nearly parallel to
the thalweg (Fig. 2.3a). The V1H2 and V1H4 internal waves had two and three cells
where the crests and troughs of the interface rotated cyclonically. The particle orbits
were nearly parallel to the thalweg except the middle of the basin in V1H4, where the
velocity vectors appeared to rotate anticyclonically (Fig. 2.3b,c; note that velocity
vectors of a cyclonic wave of higher horizontal mode do not necessarily rotate in
cyclonic direction as seen in the analytical solution for a flat-bottomed circular basin;
e.g., Stocker and Imberger 2003). In V1H2, resonance in Shiozu Bay made the interface
displacement in the bay larger than in the main part of the lake. V1H3 had a similar
structure to V1H2 except that the phase of the motion was opposite in Shiozu Bay (not
shown). V1H6 was the lowest mode with an anticyclonic cell located in the middle of
the North Basin (Fig. 2.3d). Field data has shown an anticyclonic rotation of the current
vectors in the middle of the North Basin with a period of 11 h in summer (Endoh et al.
1995a), confirming existence of this mode. Overall, the frequencies and horizontal
structure of these modes matched well with previous studies (Table 2.1).
The horizontal structure of the velocity in the upper layer determines the potential
magnitude of the excitation of internal waves under any given wind field (Eq. 2.25; the
evolution of internal waves and temporal variation of the wind must be taken into
account to evaluate the actual magnitude as indicated by Eq. 2.23). As an example, we
considered the effect of the asymmetric shape of the lake and wind direction under
spatially uniform winds. A NE-SW wind favoured the V1H1 internal wave (Fig. 2.4)
because the velocity in the surface layer was approximately parallel to the thalweg (Fig.
Chapter 2. Horizontal structure and excitation of primary motions
19
2.3a). On the other hand, WNW-ESE winds would excite V1H2 and V1H4 to a greater
extent than V1H1 (Fig. 2.4). The velocity pattern associated with V1H2 (Fig. 2.3b)
showed that the curvature of the thalweg made the WNW-ESE components of the upper
layer velocity in the two cells parallel and in the same direction, resulting in a large
value of
) (r
W
. The velocity in the central and southern cells in V1H4 had a similar
magnitude but opposite direction (Fig. 2.3c), so the correlation between winds and
upper layer velocity in the northern cell determined the magnitude of excitation.
Excitation of V1H6 had less dependence on wind direction because the dominant
anticyclonic cell had a nearly circular particle orbit.
a) V1H1 b) V1H2
c) V1H4 d) V1H6
2 cm s
-1
10 km
0 0.1 0.2 0.3 0.4 0.5 0.6
Amplitude (m)
0 0.2 0.4 0.6
Interface displacement (m)
-0.6 -0.4 -0.2
Fig. 2.3. Internal waves in Lake Biwa: (a) V1H1, (b) V1H2, (c) V1H4, and (d) V1H6. The middle
panels correspond to the phase where the rates of energy input (
( )
) (
Re
r
W
) from spatially uniform
winds are the largest (
) (r
= 30, 120, 115, 70, see Fig. 2.4), and the right panels correspond to a
quarter period after the left. Shading and vectors show the interface displacement and the average
velocity in the upper layer, respectively. In the smaller left panels, shading and lines respectively
show co-range contour and co-phase lines of wave trough with 45 interval. The co-phase lines with
triangles correspond to the phase shown in the middle figures, and the triangles show direction of
rotation. The modes are normalized to
) ( ~ r
e
= 2 GJ. Ellipses with dashed lines indicate cyclonic and
anticyclonic cells used to calculate the dispersion relationship (see Fig. 2.11).
Application of modal analysis to strongly stratified lakes
20
0 90 180 270 360
0
0.1
0.2
0.3
0.4
0.5
Wind direction (degrees)
N
o
r
m
a
l
i
z
e
d
e
n
e
r
g
y
i
n
p
u
t
(
-
) V1H1
V1H2
V1H4
V1H6
Fig. 2.4. Normalized maximum energy input from spatially uniform winds blowing from different
directions. Since energy input depends on the phase of the mode, the maximize energy input is
normalized by the norm of
) (
~
r
and f (thus vertical axis corresponds to ( ) ( ) ( ) 1
/ , ,
r r r
W
M f M f
).
Wind direction is 0 when the wind is blowing from the north, and it is positive clockwise.
2.4.3 Spatial structure and excitation of gyres
The horizontal mode 1 geostrophic gyre existing in the upper layer (L1H1) had one
cell in the middle of the North Basin (Fig. 2.5a), corresponding to the First Gyre. L1H2
consisted of two counter-rotating gyres, and the superposition with L1H1 led to the
north-south migration of the First Gyre (Fig. 2.5a,b). L1H3 induced strong gyres in
south-central part of the North Basin (Fig. 2.5c), corresponding to the Second Gyre.
General characteristics of these modes, such as quasi-geostrophic circular currents in the
upper layer and an isostatic balance of the interface displacements, also agreed with the
field observations (Endoh 1986; Endoh et al. 1995a).
Geostrophic gyres in the lakes interior are excited only when wind stress curl is
non-zero. This follows directly from the vorticity equation, but may also be shown from
Eq. 2.25 if we rewrite this equation in terms of the volume stream function for the upper
layer
) (
1
r
:
) (
1
1
1
) (
1
r r
h v =
(2.26)
that is valid when
1
1 f
<< and ( )
1
2 2
1
1 gh f L
<< , where L is the horizontal length
scale of the gyre. The boundary condition corresponding to Eq. 2.6 is: (Rao and Schwab
1976)
0
) (
1
1
1
=
r
h
(2.27)
Chapter 2. Horizontal structure and excitation of primary motions
21
Using the stream function and the boundary condition, Eq. 2.25 may be written as
( ) ( ) ( )dA h dA h W
s
r
s
r r
= =
1
1
) (
1
) (
1
1
1
) (
(2.28)
Since the velocity induced by a geostrophic gyre exists in the lakes interior where
1
h is
constant, the above equation shows that geostrophic gyres are excited only if wind stress
has a non-zero curl component. It also implies that the circulation pattern of geostrophic
gyres is a reflection of the wind stress curl field, since the horizontal structure of
geostrophic gyres is rather arbitrary (provided that Eqs. 2.9 and 2.10 are satisfied) and
the correlation between the stream function and wind stress curl determines the
excitation (Eqs. 2.23 and 2.28).
a) L1H1 b) L1H2 c) L1H3
5 cm s
-1
10 km
-0.3
0
0.3
I
n
t
e
r
f
a
c
e
d
i
s
p
l
a
c
e
m
e
n
t
(
m
)
Fig. 2.5. Geostrophic gyres in Lake Biwa: (a) L1H1, (b) L1H2, and (c) L1H3. The panels show the
most frequently observed phase during days 248-256 in the simulation results (
) (r
= -112.5, -135,
135). Shading and vectors show the interface displacement and the average velocity in the upper
layer, respectively. The modes are normalized to
) ( ~ r
e
= 2 GJ.
Therefore, typical wind patterns over Lake Biwa were investigated. The SE wind
(Fig. 2.6a) is frequently observed to occur in the warm season (Endoh et al. 1995b),
during which the wind speed is strongest at the northern end of the lake and gradually
weakens southwards. The lake breeze (Fig. 2.6b) is one of the most typical wind
patterns, but it induces a weak wind (Endoh et al. 1995b). The most dominant wind
pattern is the strong NW wind (Fig. 2.6c), which has stronger wind speed in the north
and the strongest wind in the middle of the lake along the Imazu - Hikone line (see Fig.
2.1). The average wind stress and its curl throughout a year reflected these characteristic
wind patterns, where wind stress was higher and wind stress curl was more positive in
Application of modal analysis to strongly stratified lakes
22
the northern half of the North Basin (Fig. 2.7), which was probably induced by the
terrain around the lake (Endoh et al. 1995b). Although the limited number of
meteorological stations prevented the construction of detailed wind fields, the positive
and negative wind stress curls (Fig. 2.7) do correlate with the cyclonic First Gyre in the
north and the anticyclonic Second Gyre in the south (see Fig. 2.10). The correlation
between the wind stress curl and the ensuing motions was further investigated using the
three-dimensional hydrodynamic simulations described next.
a) Day 236 17:00 h b) Day 244 12:00 h
5 m s
1
c) Day 248 17:00 h
Fig. 2.6. Typical wind patterns over Lake Biwa: (a) the SE wind, (b) the lake breeze, and (c) the
NW wind. All examples were taken from the wind field during BITEX93. Wind data measured at
five land-based stations were corrected against the offshore station data (see text) and linearly
interpolated over the lake. Circles and a triangle indicate land-based and offshore meteorological
stations, respectively.
0 50 100 150 200 250 300 350
-2.0
-1.0
0.0
1.0
2.0
3.0
Day of the year (1994)
W
i
n
d
s
t
r
e
s
s
c
u
r
l
(
1
0
-
6
N
m
-
3
)
b) Wind stress curl
0
0.05
0.10
0.15
0.20
W
i
n
d
s
t
r
e
s
s
(
N
m
-
2
)
a) Wind stress
north
south
Fig. 2.7. Spatially averaged (a) wind stress and (b) wind stress curl in 1994. Lake Biwa was split
into northern and southern halves by the dashed line shown in Fig. 2.1, which corresponds to an
approximate boundary between the First and Second Gyre. Data were low-pass filtered with a cut-
off frequency of 7 d.
Chapter 2. Horizontal structure and excitation of primary motions
23
2.5 Three-dimensional hydrodynamic simulations of Lake Biwa
2.5.1 Hydrodynamic model
In order to further validate the results obtained from the modal analysis, three-
dimensional hydrodynamic simulations were conducted using ELCOM. This model
solves the unsteady Reynolds-averaged Navier-Stokes equation and scalar transport
equations with the hydrostatic and Boussinesq approximations (Hodges et al. 2000;
Laval et al. 2003; Simanjuntak et al. Submitted). One unique feature of ELCOM is the
mixing model. It first calculates the generalized gradient Richardson number, which
takes account of the turbulent kinetic energy input from wind stirring, penetrative
convection, and bottom friction (Simanjuntak et al. Submitted). Next, a fraction of
variables, such as momentum and temperature, is exchanged between vertically adjacent
cells based on the relationship between gradient Richardson number and turbulent
fluxes established from in-situ turbulence measurements (e.g., Saggio and Imberger
2001; Yeates et al. Submitted).
Lake Biwa was discretized into a rectangular staggered (or Arakawa C-) grid with
horizontal dimensions of approximately 460 m 570 m (same as the grid used for the
modal analysis) and vertical length ranging from 0.5 m to 2.5 m, with higher resolution
in the region of stronger stratification (see Fig. 2.1 for schematics of the grid). The time-
step was set to 120 s, and the initial temperature profile was taken from field data during
BITEX93 and routine monitoring data at Sta. 17B (Fig. 2.2). A spatially variable wind
field constructed by linear interpolation of the corrected wind data was used to force the
model. Surface thermodynamics and river inflows were neglected as model runs were
short in duration.
2.5.2 Preferential excitation of internal waves
The model was run during BITEX 93 to further investigate the preferential
excitation of the internal waves. During the experiment, three typhoons passed near the
lake on days 239-240, 247, and 252, and relatively calm periods between these events
(Fig. 2.8a). The wind primarily excited vertical mode 1 internal waves (Fig. 2.8b) and
the spectrum analysis showed the presence of V1H1, H2, H4, and H5 internal waves
(Table 2.1; Saggio and Imberger 1998). Strong S winds on day 247 caused upwelling in
the southern end of the North Basin, which was followed by an internal surge with an
Application of modal analysis to strongly stratified lakes
24
amplitude of more than 20 m that moved around the basin and intercepting the
thermistor chain on day 248 (Hayami et al. 1996). Although mixing in this wind event
was slightly overpredicted by the model (Fig. 2.8c), the overall results agreed well with
the field data, indicating that ELCOM was capable of reproducing the basin-scale
internal wave dynamics in the lake. The results also justified the correction of wind
speeds measured at land-based stations.
-15
-10
-5
0
5
10
15
W
i
n
d
s
p
e
e
d
(
m
s
-
1
)
a) Wind
W E
S N
0
10
20
30
40
50
D
e
p
t
h
(
m
)
b) t-chain
236 238 240 242 244 246 248 250 252 254 256
0
10
20
30
40
50
Day of the year (1993)
D
e
p
t
h
(
m
)
c) ELCOM
Fig. 2.8. Comparison of temperature profiles at BN50: (a) EW and NS components of the wind
velocity (positive when wind is blowing from west and south, respectively), (b) the thermistor chain
data, and (c) the results of the simulation. All data were averaged and subsampled at 30-min
interval for plotting purposes. Please note that the discrepancy of temperature near the surface is
due to negligence of surface heat dynamics in the simulation.
The evolution of internal waves was extracted by Eq. 2.17 using calculated modes
) (
~
r
(e.g., Fig. 2.3 and Fig. 2.5) and the state vector , which was calculated from the
results of the simulation by finding the 16 C isotherm, which corresponded to 18-m
depth at the beginning of the simulation. Note that this method induces an error if
amplitudes of the basin-scale internal waves become so large that cause significant
horizontal movement of the interface (e.g., day 247-248.5).
The amplitudes and phase of V1H1, H2, H4, and H6 internal waves are shown in
Fig. 2.9. Although a comprehensive assessment of the result in Fig. 2.4 was not possible
due to a lack of strong NE or SW winds, strong SE and NW winds on day 239-240 and
Chapter 2. Horizontal structure and excitation of primary motions
25
252 did excite the four internal waves to comparable magnitudes (Fig. 2.9; Table 2.1).
On days 239-240, a longer duration of the wind event compared to the periods of these
waves (Table 2.1) resulted in decreased peak amplitudes of the higher modes due to the
cancelling effect, as shown in analytical solutions under a suddenly imposed wind (e.g.,
Birchfield 1969; Stocker and Imberger 2003). Larger amplitudes of the higher modes on
day 252 compared to Fig. 2.4 resulted from larger wind speed in the north of the North
Basin, where one extra cell in V1H4 and the dominant anticyclonic cell in V1H6 were
located. These results suggest that, although the spatial variation of winds and the
temporal interaction between winds and internal waves modify the results predicted by
the simplified analysis (Fig. 2.4), the preferential excitation was well predicted by the
modal analysis.
236 238 240 242 244 246 248 250 252 254 256
0
2
4
6
8
Day of the year (1993)
c) V1H4
236 238 240 242 244 246 248 250 252 254 256
Day of the year (1993)
d) V1H6
0
2
4
6
8
-3.5
0
3.5
A
m
p
l
i
t
u
d
e
(
-
)
P
h
a
s
e
(
r
a
d
)
a) V1H1 b) V1H2
A
m
p
l
i
t
u
d
e
(
-
)
P
h
a
s
e
(
r
a
d
)
-3.5
0
3.5
Fig. 2.9. Evolution of the amplitude and phase of (a) V1H1, (b) V1H2, (c) V1H4, and (d) V1H6
internal waves. Only relative magnitude of the amplitude have relevance because their absolute
values depend on choice of normalization factor
) ( ~ r
e
. The phase increases at a rate of
) (r
when the
modes are free, since the phase shown here is related to the modes with positive natural
frequencies. The results during the shaded period are not reliable since the interface displacement
was too large to apply the linear theory. The phase in panels (c) and (d) are also not reliable when
the amplitudes are low, e.g., days 242-245.
Application of modal analysis to strongly stratified lakes
26
Field measurement
a) 2223 Jun 1994
Simulation
30 cm s
1
b) 2627 Jul 1994
Fig. 2.10. Comparison of average velocity in the upper 10 m between field measurements by an
ADCP over two days and the results of the simulations averaged over the corresponding two days
on (a) 22-23 June 1994 and (b) 26-27 July 1994. The observed velocities along 11 transects in EW
direction were linear interpolated to plot the ADCP data.
2.5.3 Excitation of gyres by wind stress curl
In order to quantitatively examine the relationship between the spatial distribution of
wind stress curl and the horizontal structure of the gyres, two simulations were
conducted. In June, 1994, two gyres, the cyclonic First Gyre in the north and the
anticyclonic Second Gyre in the middle, were clearly visible in both the field and model
data (Fig. 2.10a), although the velocities in the model results were slightly smaller than
the observed value. By July, the strong and large First Gyre extended southward in the
field measurement, which was reproduced well by ELCOM, but the model also
predicted two minor gyres in the southern part, which were not distinguishable in the
Chapter 2. Horizontal structure and excitation of primary motions
27
field data (Fig. 2.10b). On the other hand, the simulations with spatially uniform wind
did not reproduce the horizontal structure and strong currents induced by the gyres (not
shown). Therefore, the results of the simulations suggest that the wind stress curl
excited the gyres and that their spatial distribution was determined by the spatial
distribution of wind stress curl, as indicated by the theory (Eqs. 2.23 and 2.28).
2.6 Discussion
In this paper, the theory of modal analysis in the horizontal plane (Platzman 1972,
1984) was extended to a layer-stratified basin with irregular bathymetry. The derivation
of decoupled evolutionary equations (Eqs. 2.21, 2.23, and 2.24) and the extraction of
modal amplitudes from the results of hydrodynamic simulations by Eq. 2.17 are the
original contributions of this study. This semi-analytical method enables us to analyse
basin-scale motions in strongly stratified lakes with arbitrary bathymetry through
numerical computation of modes. It also provides general conceptual understanding
through the decomposition of overall response of a lake into the responses of the
individual modes, and the separation of the effects of wind forcing into the spatial factor
(condensed into
) (
~
r
f or
) (r
W
, Eqs. 2.22 or 2.25) and temporal factor (described by Eqs.
2.21, 2.23, and 2.24). If the bathymetry, stratification, latitude, and wind field over a
lake are known, this method allows us to predict at least the initial stage of the response
of primary motions in a strongly stratified lake.
The calculated internal wave fields (Fig. 2.3) allowed us to investigate the horizontal
structure of the internal waves following Gmez-Giraldo et al. (2006), who suggested
that the horizontal structure consisted of independent elliptical cells that yielded the
same frequency from the dispersion relationship of Kelvin and Poincar waves in a
circular (or elliptic) basin. Ellipses were fitted to the internal wave structure based on
the co-range and co-phase diagrams of the interface displacement (see Fig. 2.3), and
their dispersion relationship was added to the dispersion diagram (Fig. 2.11). The
Burger number of each cell was calculated based on the major (minor) axis length for a
cyclonic (anticyclonic) cell and the mean celerity. The oscillation in Shiozu Bay and
one anticyclonic cell in V1H7 were excluded from the figure since the former was
simply an internal seiche in the bay and the size of the latter appeared ambiguous.
Although the horizontal structure of internal waves is in general more complicated than
Application of modal analysis to strongly stratified lakes
28
a simple cellular structure, as shown by Rao (1966), it is interesting to see that the
dispersion relationship of each cell appeared to satisfy the dispersion relationship as a
first approximation, even if each cell did not necessarily satisfy the boundary condition
in elliptic basins.
A
s
p
e
c
t
r
a
t
i
o
a
-
1
b
a)
0 0.5 1 1.5
0.2
0.4
0.6
0.8
1
S
lat
=(fb)
-1
c
b)
0 0.5 1 1.5
S
long
=(fa)
-1
c
V1H1 V1H2 V1H3 V1H4 V1H5 V1H6 V1H7 V1H8
0
.
0
0
.
5
1
.
0
1
.
5
2
.
0
2
.
5
1
.
0 1
.
5
2
.
0
2
.
5
3
.
0
Fig. 2.11. Dispersion relationship of the fundamental mode (a) Kelvin wave and (b) Poincar wave
in elliptic basins. Solid lines represent contour of the ratio of the natural angular frequency to the
inertial frequency
1 ( ) r
f
, dotted lines indicate the natural period of the V1H1-H8 internal waves in
Lake Biwa, symbols indicate dispersion relation of each cell in their horizontal structure (see Fig.
2.3), a and b are the half-length of the major and minor axis of a basin or a cell, respectively, and
long
S
and
lat
S
are the Burger number based on major and minor axis length respectively. For V1H1,
the half-length of the thalweg was used as the major axis length.
In Lake Biwa, Saggio and Imberger (1998) identified internal waves of higher
horizontal modes with relatively large amplitudes; the modal analysis showed that this
was a result of the asymmetric shape of the basin and the direction of the prevailing
winds. This result can be extended to other lakes with irregular shape. An asymmetric
basin shape breaks the symmetry of the velocity field in the upper-layer and increases
the maximum correlation between the upper layer velocity and wind stress, allowing
preferential excitation of higher horizontal modes even by spatially uniform wind. This
would explain why internal waves of higher horizontal modes have been observed in
other lakes with irregular shape (e.g., Wang et al. 2000; Lemmin et al. 2005).
Chapter 2. Horizontal structure and excitation of primary motions
29
The wind stress curl over Lake Biwa can excite the gyres and determine their
horizontal structure, as indicated previously by Endoh (1986) and Endoh et al. (1995b).
Wind stress curl is more important in a strongly stratified lake than in a homogeneous
lake because the stratification prevents the generation of circular currents due to
topographic effect in a lakes interior. The results of this study suggest that wind
variability over a lake is crucial to studies of gyres in strongly stratified lakes, especially
ones surrounded by complex terrain as pointed out by Rueda et al. (2005).
Since the modal analysis suggested in this paper assumes a linear, layer-stratified
system without damping, the applicability of the decoupled evolutionary equations (Eq.
2.21 or Eqs. 2.23, and 2.24) to more realistic cases with non-linear effects, continuous
stratification and damping needed to be assessed. This was done using the results of the
simulation during BITEX93.
The total energy and accumulation of energy input to the V1H1 internal wave were
calculated from the extracted amplitude in Fig. 2.9a. Because of damping in the
simulation, the modal total energy deviated from the accumulated energy input with
time, and the increase of the total energy tended to be less than the increase of the
accumulated energy input (Fig. 2.12a). However, the timing and magnitude of increase
of the total energy and accumulated energy input in each wind event agreed reasonably
well in most cases, as indicated by Eq. 2.23. The deviation of the phase, calculated by
straightening the extracted phase in Fig. 2.9a and subtracting the constant increase of
phase at a rate of
) (r
, were compared with accumulated phase input (second term in
the right-hand side of Eq. 2.24) (Fig. 2.12b). Although a discrepancy appeared after day
248 due to weakening of the stratification in the simulation (Fig. 2.8c), the trends of the
phase deviation and the accumulated phase input matched well. These results suggest
that Eqs. 2.23 and 2.24 give a first approximation for the effects of winds on individual
internal waves, if the damping and the change of background stratification are not
significant.
Application of modal analysis to strongly stratified lakes
30
236 238 240 242 244 246 248 250 252 254 256
-15
-10
-5
0
5
Day of the year (1993)
P
h
a
s
e
d
e
v
.
(
r
a
d
)
b) Phase
(r)
(r)
t
Im(W
(r)
)/2E
(r)
-20
0
20
40
60
80
100
120
T
o
t
a
l
e
n
e
r
g
y
(
G
J
)
a) Energy
E
[r]
Re(W
[r]
)
Fig. 2.12. Comparison of (a) the modal total energy
[ ] r
E
(Eq. 2.20) and accumulated energy input
( )
[ ]
Re
r
W
(Eq. 2.23), and (b) the phase deviation and accumulated phase input
( )
) ( ) (
2 / Im
r r
E W
(Eq.
2.24) for V1H1 internal wave. In panel (b), the deviation of the phase was calculated by
straightening the extracted phase (Fig. 2.9a) and subtracting the constant increase of phase at a rate
of
) (r
. Since the phase input was not reliable when the total energy was small, the accumulation of
phase input was equated to the phase deviation on day 236.9 and 240.8 (triangles). See Table 2.1
and Fig. 2.9 for the meaning of [r] in the superscript and shaded period, respectively.
In contrast, Eq. 2.23 was found to be applicable only to the initial stage of excitation
of the gyres; once they were excited, interactions among geostrophic gyres appeared,
which changed the total energy of L1H1 and L1H2 while the total energy of all
geostrophic gyres remained approximately constant (Fig. 2.13). The interactions were
most likely due to non-linear effects, because the total energy and the accumulated
energy input began to deviate when the total energy exceeded ~10 GJ and it stayed at
this level on days 243-247 and 250-256 (Fig. 2.13a).
Chapter 2. Horizontal structure and excitation of primary motions
31
-20
0
20
40
60
80
100
T
o
t
a
l
e
n
e
r
g
y
(
G
J
)
a) Sum of GS
E
[r]
Re(W
[r]
)
T
o
t
a
l
e
n
e
r
g
y
(
G
J
)
b) L1H1
236 238 240 242 244 246 248 250 252 254 256
-5
0
5
10
15
20
25
Day of the year (1993)
T
o
t
a
l
e
n
e
r
g
y
(
G
J
)
c) L1H2
-5
0
5
10
15
20
25
Fig. 2.13. Comparison of the modal total energy
[ ] r
E
(Eq. 2.20) and accumulated energy input
( )
[ ]
Re
r
W
(Eq. 2.22) for (a) sum of all geostrophic modes, and (b) L1H1 and (c) L1H2 geostrophic
gyres. See Table 2.1 and Fig. 2.9 for the meaning of [r] in the superscript and shaded period,
respectively.
As the simulation results were decomposed into modal components, it would be
valuable to examine how many modes significantly contributed to the dynamics in Lake
Biwa. The contribution was investigated through energy partitioning, since the sum of
all modal total energy
) (r
E approaches the total energy in the simulation results under
two-layer approximation (Eq. 2.19). The results showed that internal waves and
geostrophic gyres contained most of the energy (Fig. 2.14a), coinciding with the
observational fact that the dynamics of Lake Biwa are dominated by these motions.
Closer examination showed that less than ten internal waves contained most of the
energy partitioned to the internal waves. For the gyres, L1H1 had dominant energy as a
single mode, but more than 50 modes contributed to the rest, each of which contained
low energy (Fig. 2.14a; Table 2.1). Note that, if only variation of temperature (potential
Application of modal analysis to strongly stratified lakes
32
energy) is considered, less than ten internal waves could well represent the variation,
since most of the energy in the gyres and topographic waves is kinetic (Table 2.1).
0
50
100
150
200
250
300
350
E
n
e
r
g
y
(
G
J
)
a) E
[r]
GS
TW
IW
SW
236 238 240 242 244 246 248 250 252 254 256
0
250
500
750
1000
Day of the year (1993)
A
c
c
u
m
u
l
a
t
i
o
n
o
f
e
n
e
r
g
y
i
n
p
u
t
(
G
J
)
b) Re(W
[r]
)
Fig. 2.14. Energy partitioning among different classes of modes extracted from the results of the
hydrodynamic simulation during BITEX93 using two layer approximation: (a) total energy
[ ] r
E
and (b) accumulated energy input from winds
( )
[ ]
Re
r
W
. The solid lines show the accumulation for
each class, and dashed, dotted, and dot-dash lines correspond to the accumulation up to the 1
st
, 5
th
,
and 10
th
internal wave modes and 1
st
, 20
th
, and 50
th
geostrophic modes. See Table 2.1 for the
meaning of [r] in the superscript.
The energy partitioning also had another interesting implication. Most of the energy
input from the winds was partitioned to the internal waves (Fig. 2.14b), followed by
their dissipation within a few days (Fig. 2.14a). On the other hand, the gyres were
damped much more slowly, most probably because the thermocline insulated the motion
from bottom friction, so that more energy was contained in the gyres during calm
Chapter 2. Horizontal structure and excitation of primary motions
33
periods (Fig. 2.14a). This suggests two different energy flux paths; most of the energy
partitioned to internal waves quickly becomes potentially available to mixing through
bottom friction at the boundary and generation of high-frequency internal waves and
instabilities in the lakes interior (e.g., Boegman et al. 2003), while a small portion of
energy partitioned to the gyres remains in the water column in the upper layer,
contributing long-term horizontal transport.
We have presented here a modal analysis applicable to basin-scale internal waves
and gyres in a strongly stratified lake with arbitrary bathymetry. The theory of modal
analysis showed in general that winds excite modes that have similar horizontal
structure of the upper layer velocity to that of the wind stress. Application of this
general result to Lake Biwa demonstrated that the internal waves of higher horizontal
modes can be preferentially excited depending on wind direction, and that the horizontal
distribution of wind stress curl determines the location of the wind-driven gyres.
Further, three-dimensional hydrodynamic simulations showed that the decoupled
modal equations give a first approximation for excitation of the individual basin-scale
internal waves, but they only successfully predicted the initial stage of excitation of the
gyres due to linear and nondissipative nature of these equations. The modal
decomposition of the simulation results also indicated that winds primarily excited the
internal waves, followed by dissipation within a few days. On the other hand, the
persistent gyres dominated the dynamics of Lake Biwa during calm periods due to their
slow damping, illustrating importance of the gyres in long-term horizontal transport.
Appendix 2.A -- Self-adjointness of operator K
Let N be the maximum number of layers and
} {i
A be the horizontal area where the
number of layers is i ( ) N , so that
} { } 2 { } 1 { N
A A A A = is the plane area of the
whole domain. Let
} {i
l be the outer boundary of
} {i
A . In a lake with two-layer
stratification,
} 1 {
A and
} 2 {
A are respectively the coastal zone shallower than the
pycnocline and the lakes interior where the water column is stratified, respectively, and
} 2 {
l is the line where the pycnocline intersects the bottom. The state vector of motion for
a N -layer system may be written as
Application of modal analysis to strongly stratified lakes
34
( ) ( )
T
t k x v
= , ,
(2.A1)
Where
( ) ( )
T
N
t k x
2 1
, , =
(2.A2)
( ) ( )
T
N
v v v t k x
2 1
, , = v
(2.A3)
are the displacement and layer-averaged velocity vectors, respectively. The linear
operator of a shallow water system and the weight matrix (Eqs. 2.4 and 2.5) with i
defined layers become
( )
|
|
\
|
=
} { } { } {
} { } {
0 } {
2
,
i i i
i i
i
i k x
H G I H
H I G O
K
L
U
(2.A4)
( )
|
|
\
|
=
} {
} {
0 } {
,
i
i
i
k x
H O
O G
M
(2.A5)
where
( ) ( ) 0 0 ,
2 1 } {
g g g diag k x
i i
= G
(2.A6)
( ) ( ) 0 0 ,
2 1 } {
i i
h h h diag k x = H
(2.A7)
are reduced gravity matrix and layer thickness matrix, the diagonal components of
which are shown in the argument,
U
I and
L
I are the upper and lower triangular unit
matrices, and O is the zero matrix. In the two layer case,
} 2 {
K and
} 2 {
M are given by
Eqs. 2.4 and 2.5, and
} 1 {
K and
} 1 {
M give the shallow water equations only for the upper
layer.
As done by Platzman (1972), we can take the inner product of ' and K
} {i
, and
'
} {
K
i
and in subdomain
} {i
A , subtraction of the latter inner product from the former,
and use of Gausss divergence theorem to find
( ) ( )
= =
+
=
k
j
l
j
k
j
l
j
A
i
A
i
i i i i
F i F i
1 1
} { } {
} 1 { } { } { } {
, ' , ' , ' , ' K K
(2.A8)
Chapter 2. Horizontal structure and excitation of primary motions
35
where the prime denotes different state of motion, the subscript of the angular bracket
denotes area where the inner product is taken,
( ) ( ) ( ) ( )
+ =
} { } {
} {
*
*
' ' , '
i i
l
i k k k k k k
l
k
dl n p v h v h p i F
(2.A9)
is the energy flux in k
th
layer across the boundary
} {i
l (
} {i
n
is the normal vector to
} {i
l ),
and
=
=
k
j
j j k
g p
1
(2.A10)
is the pressure deviation in k
th
layer. The definition of the inner product (Eq. 2.11) may
be generalized as
=
=
N
i
A
i
1
} {
, ' , '
(2.A11)
Using this definition, the sum of Eq. 2.A8 over all
} {i
A yields
( )
=
=
N
i
l
i
i
F
1
} {
, ' , ' , ' K K
(2.A12)
Now the right-hand-side (RHS) represents energy flux through the boundary of the
whole domain A, since the energy fluxes within the domain cancel out due to the
continuity. If Eq. 2.6 (zero volume flux normal to the boundary) is satisfied on all part
of the boundary (or open boundary condition 0 =
k
p is satisfied where the boundary is
open), then the RHS of the above equation vanishes, yielding the self-adjointness of K
(Eq. 2.12). Please note that the proof is valid for any horizontal distribution of
k
, g ,
k
h , f , since no assumption was made.
Once self-adjointness of K is shown, the proofs of orthogonality and completeness
of modes are straightforward using the new definition of inner product (Eq. 2.A11), the
series expansion (Eq. 2.16), and the eigenequations for subdomain
} {i
A
K M
~ ~
} { } { i i
=
(2.A13)
Application of modal analysis to strongly stratified lakes
36
( is common for all
} {i
A since basin-scale coherent motion is assumed). The modal
equations (Eqs. 2.21, 2.23, and 2.24) can be derived by following the same procedure.
Chapter 3. Energetic and damping of internal waves
37
Chapter 3. Energetics and damping of internal waves
in a strongly stratified lake
Abstract
Energetics and damping of basin-scale internal waves and subsequent near-bottom
transport processes in Lake Kinneret were investigated using the modal analysis in a
layer-stratified irregular basin. The theory was extended to include small linear
damping, and energy budgets and damping rates of five dominant internal waves were
extracted by fitting numerically calculated internal waves to isotherm displacements
measured by six thermistor chains distributed throughout the lake. Energy contained in
the dominant internal waves (~ 3 GJ) resulted from a balance between energy input
from diurnal winds and dissipation within a day, both of which were estimated to be 3
~ 4 GJ d
-1
. Damping was caused primarily by bottom friction and the damping rates (e-
folding time) varied from 1 to 3 d depending on the velocity structure. Currents
induced by the internal waves caused considerable spatial variability of the bottom
shear stress and near-bottom transport processes, such as entrainment rate at the top of
the benthic boundary layer and mass transfer at the sediment-water interface.
3.1 Introduction
The primary sources of energy in a lake are the solar radiation and the rate of wind
working on the surface. Solar radiation sets up the stratification due to surface heating;
it may also create weak currents through differential cooling and heating (Monismith et
al. 1990; Okely and Imberger 2007). On the other hand, winds excite a variety of
motions ranging from energetic basin-scale internal waves to small-scale turbulent
motions (Imberger 1998), all of which support transport of materials. In the water
column, part of the turbulent kinetic energy (TKE) is converted to potential energy
through diapycnal mixing, whereas energy dissipation near the bottom causes
resuspension of particulate materials (Gloor et al. 1994), entrainment at the top of the
benthic boundary layer (BBL) (Gloor et al. 2000; Lemckert et al. 2004), and
enhancement of mass transfer at the sediment-water interface (Lorke et al. 2003). These
In press as: Shimizu, K., and J. Imberger. Energtics and damping of internal waves in a strongly
stratified lake. Limnol. Oceanogr. Centre for Water Research Reference ED 2146-KS.
Application of modal analysis to strongly stratified lakes
38
links make energetics of internal waves relevant not only for physical processes but also
for chemical and biological processes.
The energy flux path in lakes has been studied by both bottom-up and top-down
approaches. The bottom-up approach employs microstructure measurements, where
turbulent fluctuations of temperature (Osborn and Cox 1972; Dillon and Caldwell 1980)
and velocity (Etemad-Shahidi and Imberger 2001; Saggio and Imberger 2001) are
measured in a water column and converted into turbulent properties such as the
dissipation rate of TKE and turbulent diffusion coefficient. This method yields direct
estimation of energy dissipation and mixing, but it is difficult to measure the
spatiotemporal variability due to the intermittent nature of the turbulence (Baker and
Gibson 1987). As a result, TKE budget is usually calculated in a basin-averaged sense
(e.g., Gloor et al. 2000; Ravens et al. 2000; West et al. 2000). The top-down approach
is to estimate the energy budget in basin-scale internal waves (Gloor et al. 2000;
Antenucci and Imberger 2001). In a strongly stratified lake, basin-scale internal waves
receive a large part of the energy input from the wind (Shimizu et al. 2007) and then
they cascade this energy, as they dissipate, down to smaller scales over the damping
period (Imberger 1998). Although this approach may only provide this information in
the metalimnion and hypolimnion of the lake away from the direct wind stirring, it has
the advantage that it allows estimation of the net energy cascade, overcoming the
spatiotemporal uncertainty inherent in the bottom-up approach. Theoretically, these two
approaches could be combined to obtain an estimate of the spatiotemporal variability of
the turbulent field, but this does not seem to have been attempted.
The spatial structure of internal waves may conveniently be visualized through their
vertical and horizontal structure in flat-bottomed elliptical basins (Antenucci and
Imberger 2001). The vertical mode 1 (V1) internal waves induce coherent vertical
oscillation in the water column and anti-symmetric currents in the epilimnion and
hypolimnion, while the vertical mode 2 (V2) internal waves cause periodic change of
the metalimnion thickness accompanied by strong horizontal jet-like currents within the
layer (Lighthill 1969; Csanady 1982; Monismith 1985). The horizontal structure of
internal waves in a rotating basin is typified by Kelvin and Poincar waves. A Kelvin
wave is a cyclonically rotating wave (counterclockwise in the Northern Hemisphere and
the opposite in the Southern Hemisphere) with the interface displacement (and velocity)
concentrated near the coast (Antenucci and Imberger 2001). On the other hand, a
Chapter 3. Energetic and damping of internal waves
39
Poincar wave rotates anticyclonically (clockwise in Northern Hemisphere) and has a
significant interface displacement over the lake and small velocity near the coast. In real
lakes, these simplified pictures are modified by the irregular bathymetry, and the spatial
structure needs to be computed using a modal analysis (e.g., Platzman 1972; Rao and
Schwab 1976; Buerle 1985) or by analyzing the results from hydrodynamic numerical
simulations (e.g., Rueda et al. 2003; Gmez-Giraldo et al. 2006).
Dissipation or damping of internal waves can take place via a number of different
mechanisms. In a lakes interior, energy contained in the basin-scale internal waves may
be transferred to internal surges and high-frequency solitary waves due to non-linear
steepening (Horn et al. 2001; Boegman et al. 2003), or it may be dissipated as a result of
shear, instability, and mixing (e.g., West and Lorke 2003). Internal waves are also
damped near the bottom boundary by, for example, bottom friction, shear-induced
instability (Lorke et al. 2005), breaking and shoaling (Vlasenko and Hutter 2002;
Boegman et al. 2005), and critical wave reflection (Ivey and Nokes 1989).
Microstructure measurements have shown that ~90 % of TKE dissipation in the
hypolimnion occurs near the boundary (West et al. 2000), indicating internal waves are
dominantly damped by boundary processes leaving a near laminar water column in the
hypolimnion. This has severe consequences for the use of three-dimensional numerical
models as a tool to investigate the energy flux path in a lake; these models suffer from
significant numerical diffusion and dissipation (Hodges et al. 2006), requiring careful
error analysis when such models are applied to estimate energy fluxes. Field
observation and/or simple conceptual models are needed to learn how and where energy
flows from the wind at the surface to turbulence in the lakes interior.
The energy dissipated near the bottom may cause resuspension of particulate matter,
and the bottom sheared turbulence entrains the hypolimnetic water into the BBL. Gloor
et al. (2000) and Lemckert et al. (2004) have proposed a simple model for the
entrainment that indicates that ~1 % of the TKE in the BBL is converted into potential
energy by this entrainment. Microstructure profiling of oxygen across the sediment-
water interface suggested that the turbulence enhances the mass transfer at the sediment-
water interface by reducing the thickness of the diffusive sublayer, which was
characterized by the Batchelor length (Lorke et al. 2003).
Application of modal analysis to strongly stratified lakes
40
Energy contained in internal waves has been evaluated for a flat-bottomed
rectangular basin (Gloor et al. 2000) and an elliptic basin (Antenucci and Imberger
2001) by fitting the analytical solutions to field data. A similar approach is possible for
more realistic bathymetry, although such application does not appear to have been done.
Energy input from winds into individual internal waves were recently quantified by
Shimizu et al. (2007) by extending the theory of modal analysis and deriving an energy
equation for individual internal waves for a non-dissipative system. Here we use this
methodology to estimate damping rates of individual internal waves by extracting
energy contained in basin-scale internal waves from field data and by closing their
energy budgets.
The objective of this paper is to investigate the energetics and damping of basin-
scale internal waves and induced near-bottom transport processes in a strongly stratified
lake. This is achieved by extending the modal analysis to derive equations for the modal
amplitude and modal energy for a weakly dissipative system by including small linear
damping. Numerically calculated basin-scale internal waves were fitted to isotherm
displacements recorded by multiple thermistor chains distributed around a lake with the
fitting coefficients being the damping rates. Particular care was taken to interpret the
estimated damping rates, as the modal analysis based on linear and hydrostatic
approximations cannot correctly handle damping due to non-linear and non-hydrostatic
mechanisms. Further, knowing the spatial structure of basin-scale internal waves
enabled an estimation of the spatial variability of near-bottom transport processes.
In this paper, we first present the theoretical basis of the modal analysis and derive
the modal evolutionary equations for a weakly dissipative system. Second, we briefly
describe the study site, Lake Kinneret, Israel, and the field data to which the theory was
applied. Third, numerically calculated basin-scale internal waves were fitted to
thermistor chain data and the energy budgets and damping rates were extracted. Based
on these results, contribution of bottom friction on damping of the internal waves and
their effects on near-bottom transport processes were investigated, followed by
discussion about the implications.
Chapter 3. Energetic and damping of internal waves
41
3.2 Theory of modal analysis with linear damping
3.2.1 Shallow water equations and the associated modes
The modal analysis in a semi-enclosed layer-stratified basin is based on the
linearized shallow water equations with hydrostatic, Boussinesq, and layer
approximations (Platzman 1972; Buerle 1985; Shimizu et al., 2007). For a three-layer
system, the linearized conservation of mass (multiplied by reduced gravity) and
conservation of momentum including the layer thicknesses may be written in a matrix
form:
( ) ( ) ( ) ( ) t k x t k x i t k x
t
, , , , , ,
f C K M + + =
(3.1)
where
( ) ( )
T
v v v t k x
3 2 1 3 2 1
, ,
=
(3.2)
is the state vector of motion and
( ) ( )
T
s
t k x 0 0 0 0 0 , ,
= f
(3.3)
is the external force vector. K, C, and M are, respectively, the non-dissipative linear
operator for the shallow water system, linear damping operator, and weight matrix given
by
( )
|
|
|
|
|
|
|
|
\
|
=
3 3 3 2 3 1 3
2 2 2 1 2
1 1 1
3 3
3 2 2 2
3 1 2 1 1 1
0
2 0 0
0 2 0 0
0 0 2 0 0
0 0
0
,
h g h g h g h
h g h g h
h g h
h g
h g h g
h g h g h g
i k x
O
K
(3.4)
( )
|
|
|
|
|
|
|
|
\
|
=
b
c
i k x
0 0
0 0 0
0 0 0
,
0
O
O O
C
(3.5)
Application of modal analysis to strongly stratified lakes
42
( ) ( )
3 2 1 3 2 1 0
, h h h g g g diag k x =
M
(3.6)
The variables are t, the time; ( )
T
y x x , =
, the horizontal coordinates; k, the layer index;
, the surface or interface displacement; ( )
T
v u v , =
, the layer-averaged velocities; g, the
acceleration due to gravity; h, the layer thickness; ( )
T
f 2 / 0 0 =
, the local vertical
angular velocity due to Earths rotation; f, the Coriolis parameter; ( )
T
sy sx s
, =
, the
surface stresses; , the density;
k
( [ ]
0 1
/
k k
for k > 1 but
0
/
k
for k = 1), the
non-dimensional density difference across k
th
interface (k = 1 indicates the surface); c
b
,
the linear bottom friction coefficient; and 1 = i , the imaginary unit.
t
is the
temporal differential operator, ( )
T
y x
= , are the two-dimensional horizontal
differential operators, the superscript T stands for matrix transpose, diag indicates the
diagonal matrix with the diagonal components given in the argument, O stands for zero
matrix, the subscript 0 denotes reference value, and non-zero subscripts indicate layer
indexes. In Eq. 3.4, the operators g
k
,
k
h , and
k
h
2 mean that their application
to
k
,
k
v
, and
k
v
result in ( ) g
k
, ( )
k k
v h
, and ( ) ( )
T
k k k k k k
v h u h f v h , 2 =
,
respectively. If there are regions shallower than an interface, the layers below the
interface are neglected (see Appendix 2.A), and bottom friction is included in the lowest
layer that is in direct contact with the bottom.
Assuming a solution of the form ( ) ( ) [ ] ( ) t i i k x t k x + = exp ,
~
, ,
, and neglecting the
forcing term, Eq. 3.1 becomes an eigenvalue problem:
( ) ( ) ( ) ( ) k x k x i ,
~
,
~
C K M + = +
(3.7)
The solutions to Eq. 3.7 consist of sets of an angular frequency
) (r
(real), a damping
rate
) (r
(real positive) and right modal structure
) (
~
r R
(the right eigenfunction; a tilde
will be used to denote variables whose magnitude depends on the normalization factor
[see Eq. 3.11] throughout this paper.) Each solution corresponds to one of the basin-
scale motions, including gyres, internal waves, and seiches (Platzman 1975; Rao and
Schwab 1976; Shimizu et al. 2007). The solutions occur in conjugate pairs; if we write a
solution with positive angular frequency with plus sign in the superscript,
Chapter 3. Energetic and damping of internal waves
43
( )
) ( ) ( ) (
~
, ,
r R r r + + +
, then its conjugate pair with negative angular frequency,
( )
) ( ) ( ) (
~
, ,
r R r r
, satisfies the relationship (Platzman 1984)
( ) ( )
*
) ( ) ( ) ( ) ( ) ( ) (
~
, ,
~
, ,
r R r r r R r r + + +
=
(3.8)
where
*
stands for the complex conjugate. Throughout this paper, if the superscript does
not have a plus or minus sign, then the relationship applies to both the modes.
In order to take advantage of orthogonality of the modes, we need to consider the
adjoint problem to Eq. 3.7 (Platzman 1984)
( ) ( ) ( ) ( ) , ,
H
i x k x k + = + M K C
(3.9)
where the superscript H denotes the conjugate transpose. The solutions again occur in
conjugate pairs:
( ) ( )
*
) ( ) ( ) ( ) ( ) ( ) (
~
, ,
~
, ,
r L r r r L r r + + +
=
(3.10)
where
) (
~
r L
is the left modal structure. Furthermore, ( )
) ( ) ( ) (
~
, ,
r R r r
and
( )
) ( ) ( ) (
~
, ,
r L r r
form an adjoint pair that satisfies the following general orthogonality:
s r
r R s R r L
e
,
) ( ) ( ) ( ~
~
,
~
= M
(3.11a)
s r
r L s L r R
e
,
) ( ) ( ) ( ~
~
,
~
= M
(3.11b)
( ) ( )
s r
r R r r s R r L
e i
,
) ( ) ( ) ( ) ( ) ( ~
~
,
~
+ = + C K
(3.12)
where
) ( ~ r R
e and
) ( ~ r L
e are the normalizing factors for the right and left modes and
j i,
(1 if i j = but zero otherwise) is the Kronecker delta. The angular brackets indicate the
inner product:
( )
= dA
H
' , '
(3.13)
where the prime is used to denote a different state vector of the same type (see Eq. 3.2),
A is the horizontal area, and the integral is taken over the whole lake. Obviously,
Application of modal analysis to strongly stratified lakes
44
*
) ( ) ( ~ ~ r R r L
e e = but we have introduced the superscripts R and L as a convenience later in
the derivation.
Any state vector can be expressed in a series expansion using the right or left
modes
( ) ( ) ( )
+
=
=
r
r R r R
t a k x t k x
) ( ) ( ~
,
~
, ,
(3.14)
where
) ( ~ r R
a is the right modal amplitude. The symbol in the equation number
indicates that the same expression applies to the left modes by exchanging R and L in
the superscript throughout this paper. Once the state vector is known,
( ) R r
a is given
by
( ) ( ) ( )
( ) ( ) 1 ( )
, , , ,
R r R r L r
a t e x k x k t
= M
(3.15)
These equations can be obtained by changing indices from r to s in Eq. 3.14,
multiplying the equations by M, taking the inner product with a particular left modal
structure
) (
~
r L
, and using the orthogonality relationship Eq. 3.11. Using the modal
expansion Eq. 3.14, we can also decompose the total energy of the system into modal
components. Substituting the modal expansions with the left and right modes (Eq. 3.14)
into the first and second in the above equation and using the orthogonality
relationship (Eq. 3.11), we get
[ ]
1
1
2
r
r
E E
+
=
= =
, M
(3.16)
where
] [r
E is the modal total (i.e. available potential plus kinetic) energy defined as
( ) ( ) ( ) ( ) ( ) ( ) t a t a e t a t a e t E
r R r L r R r R r L r R r ) (
*
) ( ) ( ) (
*
) ( ) ( ] [ ~ ~
2
1
+ + +
+ =
(3.17)
The square brackets in the superscript indicate the sum of the conjugate pair to yield
real value (see Eqs. 3.8 and 3.10; the indices are always positive). In general,
[ ] r
E are
not positive definite for dissipative modes and may lose their physical relevance as the
Chapter 3. Energetic and damping of internal waves
45
modal energy; however,
[ ] r
E remain positive definite when damping is small (as is the
case treated later in this paper; see Appendix 3.A).
3.2.2 Governing equations of modal amplitude and energy
The modal amplitude equations for the right modes can be derived by substituting
Eq. 3.14 into Eq. 3.1, taking the inner product of the equation with a particular left
mode, and using the orthogonality relationships (Eqs. 3.11 and 3.12)
( ) ( ) ( ) ( ) t f t a e i t a e
r R r R r R r r r R
t
r R ) ( ) ( ) ( ) ( ) ( ) ( ) (
~
~ ~ ~ ~
+ =
(3.18)
where right modal force
) (
~
r R
f is defined by
( ) ( ) ( ) ( ) ( ) t x x v t x x t f
s
r L r L r R
, ,
~
, ,
~ ~
) (
1
) ( ) (
= = f
(3.19)
and
) (
1
~
r L
v
is the layer-averaged velocity in the top layer induced by the r
th
left mode. We
assumed only linear bottom friction as a damping mechanism (Eq. 3.5), but Eq. 3.18 can
be derived with other linear damping mechanisms, such as interfacial friction, radiation
of waves to shallow coastal regions (Platzman 1984), and horizontal dispersion of
momentum.
If we limit our derivation for small damping, Eqs. 3.18 and 3.19 also apply to the left
modes (Appendix 3.A). In this case, we can derive the modal energy equations by
multiplying Eq. 3.18 by
*
) ( ~ r L
a , and the complex conjugate of Eq. 3.18 for the
corresponding left modes by
) ( ~ r R
a , then adding the two resulting equations, further
adding the conjugate pair (+r and -r) in order to obtain real variables, and finally
dividing by two:
( ) ( ) ( ) t D t W t E
r r r
t
] [ ] [ ] [
=
(3.20)
where
] [r
W
is the the modal rate of working by wind and
] [r
D
is the modal rate of
energy dissipation defined as:
( ) ( ) ( ) ( ) ( ) ( ) ( ) t x t x v t x t x v t W
s
r R
s
r L r
, , , Re , , , Re
) (
1
) (
1
] [
+ =
(3.21)
( ) ( ) t E t D
r r r ] [ ) ( ] [
2 =
(3.22)
Application of modal analysis to strongly stratified lakes
46
where
) (
1
) ( ) (
1
~
~ r R r R r R
v a v
= and
) (
1
) ( ) (
1
~
~ r L r L r L
v a v
= represent the velocity in the top layer
induced by the r
th
right and left mode, respectively. As shown in the Appendix 3.A, the
energy budget remains approximately the same if we use non-dissipative modes in Eqs.
3.17, 3.21, and 3.22 in stead of dissipative modes, provided that damping is small.
The previously mentioned theory holds for all types of modes, although only modes
that represent basin-scale internal waves are discussed in this paper.
3.3 Study site and field data
3.3.1 Study site
Lake Kinneret is a monomictic lake located in the Jordan Valley in northern Israel
(32.7N, 35.5E; inertial period 22.3 h). The Jordan River, which empties into the
northern end of the lake, is the major inflow, while the water that is pumped into the
National Water Carrier constitutes the major outflow. During summer, the lake is
strongly stratified with a typical surface and hypolimnion temperature of 28 and 16 C,
respectively (Serruya 1975). The lake is forced by a diurnal Mediterranean westerly sea
breeze with the typical wind speed of around 10 m s
-1
(Avissar and Pan 2000). The V1,
horizontal mode 1 (H1) Kelvin wave has a period close to 1 d and often resonates with
the wind (Antenucci and Imberger 2003). The bottom currents induced by the basin-
scale internal waves is known to induce mixing near the bottom, causing resuspension
of the sediment and creating a well-mixed BBL (Lemckert et al. 2004; Marti and
Imberger 2006) with distinct water quality (Nishri et al. 2000; Eckert et al. 2002).
3.3.2 Field data
Thermistor chain and meteorological data collected during the field campaign in
2001 are used in this paper (see Gmez-Giraldo et al. 2006 for details). Thermistor
chains were deployed at six stations (Fig. 3.1). The thermistors were positioned
vertically every 0.5 m and sampled at 20-s intervals at T4 and every 0.75 m with 10-s
intervals at all the other stations. The accuracy of the thermistor was about 0.01 C. The
data were low-pass filtered with the cut-off frequency of 0.5 h
-1
to eliminate high-
frequency variations. Isotherm levels were calculated by linearly interpolating
temperature between the thermistors (Fig. 3.2).
Chapter 3. Energetic and damping of internal waves
47
All thermistor chains were equipped with wind sensors 2.4 m above the water
surface. Wind data measured at two further stations (En Gev and Tabgha, see Fig. 3.1)
were also used to obtain better resolution of spatial distribution of winds. The wind data
were also low-pass filtered and a spatially variable wind field was constructed by linear
interpolation.
N
32.87 N
35.50 E
T4
Tv
Tg
Tf
T9
T7
En Gev
Tabgha
2 0 4
km
* contour line every 5 m
Thermistor chain
& wind sensor
Wind sensor only
Fig. 3.1. Bathymetry of Lake Kinneret and locations of measurement stations. Circles and triangles
show locations of thermistor chains (equipped with wind sensor) and wind sensors, respectively.
Thick lines indicate horizontal boundaries of computational grids for modal computation with the
interfaces at 14.4 m and 19.3 m deep, corresponding to 25 C and 19 C isotherms.
Application of modal analysis to strongly stratified lakes
48
Fig. 3.2. Results of the field experiment from
18 Jun to 01 Jul 2001. (a) Wind speed and
(b) wind direction measured 2.4 m above the
water surface at Ty (close to Tv), and
isotherm depths at (c) Tg, (d) Tf, (e) T9, (f)
T7, (g) Tv, and (h) T4. In panel (b), wind
direction is 0 for wind blowing from north
and positive clockwise. In panels (c-h),
isotherms are plotted with 2 C interval with
the top line being 25 C isotherm. 25 and 19
C isotherms were used for the mode fitting,
and dashed lines show basin-wide trends of
the isotherm deepening used to calculate
isotherm displacements.
20
15
10
5
D
e
p
t
h
(
m
) c) Tg
20
15
10
5
D
e
p
t
h
(
m
) d) Tf
20
15
10
5
D
e
p
t
h
(
m
) e) T9
20
15
10
5
D
e
p
t
h
(
m
) f) T7
30
25
20
15
10
5
D
e
p
t
h
(
m
)
g) Tv
171 173 175 177 179 181 183
30
25
20
15
10
5
D
e
p
t
h
(
m
)
Day of the year
h) T4
0
5
10
15
W
i
n
d
s
p
.
(
m
s
-
1
)
a) Wind speed
0
90
180
270
360
W
i
n
d
d
i
r
.
(
d
e
g
)
b) Wind direction
Chapter 3. Energetic and damping of internal waves
49
The winds during the campaign were characterized by strong diurnal westerly winds
that started abruptly after midday and lasted for about 6~8 h (Fig. 3.2a,b). Typical
spatial wind patterns over the lake in summer have been presented by Pan et al. (2002)
and Laval et al. (2003). Corresponding to these periodic winds, the 23 C isotherms at
the six stations showed a dominant diurnal oscillation that was due to the V1H1 Kelvin
wave that had the period T = 22 h, excited by the resonance between the wave and the
wind (Antenucci and Imberger 2003; Gmez-Giraldo et al. 2006). The dominant
oscillation was accompanied by a V1 oscillation with T = 10.5 h and diurnal expansion
and contraction of the metalimnion (see difference of 25 C and 19 C isotherm levels
in Fig. 3.2c-h). The former oscillation was identified as V1H1 Poincar wave
(Antenucci et al. 2000) that had an anticyclonic cell in the north and cyclonic cell in the
south (Gmez-Giraldo et al. 2006); the latter were identified as V2 and V3 internal
waves by Antenucci et al. (2000). As shown later, the former was also caused by V1H3
cyclonic wave mixed with higher horizontal and vertical modes, and the latter was
primarily due to V2H3 cyclonic wave.
3.4 Spatial structure of basin-scale internal waves in Lake Kinneret
Here we present the spatial structure of the dominant internal waves obtained as a
part of numerical solutions of Eq. 3.7; the amplitudes of these waves were later
determined by matching the resulting interface displacements to the isotherm
displacements recorded by the six thermistor chains as explained in the next section.
In setting up the solution of Eq. 3.7, a three-layer model was used in order to analyze
the expansion and contraction of the metalimnion (Fig. 3.2). The 25 C and 19 C
isotherms (14.5 and 19.3 m deep) were chosen as representative isotherms since their
vertical displacements were maximum for the V1 and V2 internal wave modes
(assuming the depth of 27 m; see e.g., Gill 1982) under a mean continuous stratification
at T4 during day 170.5-171.5 (Fig. 3.3a-c). The corresponding layer densities were
obtained by taking the averages over the layer thicknesses leading to a density
difference of 1.17 and 1.04 kg m
-3
, respectively, for the upper and lower interfaces.
Then Eq. 3.7 was discretized with 400 m 400-m horizontal grid using finite
difference method described by Shimizu et al. (2007) and the resulting eigenvalue
problem was solved numerically. No damping was included for the modal computation.
Application of modal analysis to strongly stratified lakes
50
15 20 25 30
40
35
30
25
20
15
10
5
0
D
e
p
t
h
(
m
)
Temperature (
o
C)
a)
0 0.005 0.01 0.015
Buoyancy frequency (Hz)
-1 -0.5 0 0.5 1
(-)
b)
V1
V2
V3
-1 -0.5 0 0.5 1
(-)
c)
V1
V2
V3
0 2.5 5 7.5 10
h
BBL
(m)
d)
h
BBL obs
h
BBL int
) (n
h
) (n
N
int
obs
int
^
^
Fig. 3.3. Background vertical structures. (a) Profiles of temperature, , and the associated
buoyancy frequency, N, at T4 averaged from day 170.5 to 171.5, (b) modal displacements,
) (
n
h
, and
(c) modal horizontal velocity,
) (
, induced by vertical mode 1 ~ 3 internal waves under continuous
stratification shown in panel (a), and (d) thickness of the BBL, h
BBL
, taken from Fig. 5 in Marti and
Imberger (2006). In order to calculate the vertical modes, the bottom boundary condition was
imposed at 27 m deep, corresponding to the average depth. Horizontal dotted lines indicate depths
of the interfaces used for modal analysis.
The horizontal structures of the dominant internal waves are shown in Fig. 3.4 and
Fig. 3.5. In order to describe their structures, it is convenient to refer to the V1and
V2 components that represent oscillations of the two interfaces in phase and out of
phase (see Fig. 3.3b). Strictly speaking, the vertical modes do not exist in a basin with
variable bottom, but the calculated internal waves showed structures that resembled
superposition of few V1 and V2 internal waves in a flat-bottomed basin with the same
horizontal shape. Therefore, in this paper, we separated the V1 and V2 components
of the interface displacements by (rather arbitrarily) defining them as ( )
3 2
5 . 0 + and
( )
3 2
5 . 0 , respectively. We also assigned names to the calculated internal waves
based on the dominant vertical component, its horizontal mode, and the direction of
rotation (C for cyclonic and A for anticyclonic), such as V1H1C, but it should be noted
that the names are rather arbitrary and do not always correspond closely to the modal
structure in a flat-bottomed basin.
Chapter 3. Energetic and damping of internal waves
51
a)
(r)
= 0
V
2
H
3
C
b)
(r)
= /2
c)
V
1
H
1
C
d)
0.05 m s
-1
2 km
Displacement (m)
-1.5 0 1.5 1.0 0.5 -0.5 -1.0
Fig. 3.4. Diurnal internal waves in Lake Kinneret. (a, b) V2H3C and (c, d) V1H1C. Panels (a) and
(c) correspond to internal wave field when net transport in the surface layer is from west to east,
corresponding to the phase during the strong diurnal westerly winds, and panels (b) and (d) a
quarter period after panels (a) and (c). Shading in panels (a, c) and (b, d), respectively, indicates
( )
3 2
5 . 0 +
and
( )
3 2
5 . 0
, which approximately correspond to V1 and V2 components of the
displacements (see text). Solid lines correspond to zero displacement, and vectors left and right,
respectively, show layer-averaged velocity in the bottom and middle layer.
The spatial structure of the V2H3C internal wave (IW) was similar to V2 azimuthal
mode 3 Kelvin wave with three crests and troughs along the perimeter and with the two
interfaces being out of phase, leading to strong horizontal currents in the metalimion
(Fig. 3.4a,b). V1H1C IW was the internal wave that had the structure closest to the V1
azimuthal mode 1 Kelvin wave (Fig. 3.4c,d). It induced one large crest and trough with
both interfaces being in phase, and nearly unidirectional currents in the bottom layer.
However, the V1H1C IW deviated from classical picture of the Kelvin wave because it
had additional V2 component that resembled an azimuthal mode 3 Kelvin wave.
V2H1A IW had an angular velocity of 10.1 10
-5
rad s
-1
(T = 17 h), and the spatial
Application of modal analysis to strongly stratified lakes
52
structure resembled a classical V2 azimuthal mode 1 Poincar wave with the maximum
velocities occurring near the middle of the basin and small velocities near the perimeter
(not shown; see Antenucci and Imberger 2001).
a)
(r)
= 0
V
1
H
3
C
b)
(r)
= /2
c)
V
1
H
1
A
d)
0.1 m s
-1
2 km
Displacement (m)
-1.5 0 1.5 1.0 0.5 -0.5 -1.0
Fig. 3.5. Same as Fig. 4 but for semi-diurnal internal waves. (a, b) V1H3C and (c, d) V1H1A.
With increasing frequency, the modal structure became more complex as seen by
examining the V1H3C and V1H1A IWs (Fig. 3.5). The V1 component of the
displacement and bottom layer velocity of these waves were similar to horizontal
structure of azimuthal mode 3 Kelvin and azimuthal mode 1 Poincar waves,
characterized by three crests with strong currents near the perimeter and one crest with
the strongest currents in the middle of the lake, respectively. The V1H3C IW was closer
to an azimuthal mode 3 Kelvin wave and V1H1A IW was closer to an azimuthal mode 1
Poincar wave. However, their V2 components resembled an azimuthal mode 7
Kelvin wave with seven crests along the perimeter and converging and diverging
currents in the lakes interior, resembling radial mode oscillation.
Chapter 3. Energetic and damping of internal waves
53
3.5 Energetics and damping of internal waves
3.5.1 Extraction of internal waves by mode fitting
We now determine the amplitudes and phase of the previously mentioned basin-scale
internal waves by fitting their interface displacements to the observed isotherm
displacements obtained from the thermistor chains distributed around the lake (Fig. 3.2).
Intuitively, this could be done by minimizing the error between the modal
displacements and the thermistor chain data at all stations at each time. However, this
method led to unrealistic fluctuations in the modal amplitudes (hence energy) since it
does not take into account the temporal evolution of the internal waves. In order to
avoid such fluctuations, we decided to force the modal amplitudes with the wind forcing
through the governing equations (Eq. 3.18) and use the damping coefficients and initial
amplitudes as free parameters to optimize the match with the observed isotherm
displacements. Since one of our purposes was to investigate the damping mechanisms
of the internal waves, we prefer to use the non-dissipative modes, as this requires no a
priori assumption about the damping mechanism. It should be noted that, in the limit of
small damping, the estimated damping rates and resulting energy budgets remain
approximately the same regardless whether the non-dissipative or dissipative modes are
used for fitting (see Appendix 3.A).
The solution to the amplitude equation Eq. 3.18 was calculated using the following
piecewise analytical solution with constant modal force
) (
~
r
f acting for a time interval
t t t
i
+ = :
( ) ( )
( )
( )
( )
2 / 1
) (
) ( ) (
) ( ) (
~
1
~ ~
) ( ) (
) ( ) (
+
= +
i
r
r r
t i
t i
i
r
i
r
t f
i
e
e t a t t a
r r
r r
(3.23)
where R and L in the superscript are omitted, as non-dissipative modes were used for the
fitting. Application of this equation for each time step yielded time series for
) ( ~ r
a .
Isotherm displacements
) ( pred
at location
j
x
, layer k
j
, and time t
j
were predicted as a
sum of displacements induced by dominant M modes:
( ) ( ) ( ) ( ) ( ) ( )
=
+ +
+ =
M
r
j
r
j
r
k j
r
j
r
k
pred
t a x t a x j
j j
1
) ( ) ( ) ( ) ( ) ( ~ ~ ~ ~
(3.24)
Application of modal analysis to strongly stratified lakes
54
where the conjugate pairs were added to yield real
) ( pred
. We defined the weighted
mean square error (both in space and time) between the prediction and observation as:
( ) ( ) ( ) ( )
=
j
pred obs
j
r r
j j w a
2
) ( ) ( ) ( ) (
0
2
,
~
(3.25)
where ( ) ( )
j j
obs
k
obs
t x j
j
,
) ( ) (
= is the observed isotherm displacement, j is the index of
observed data, and w
j
is the weight of j
th
data. Because the initial amplitudes
) (
0
~ r
a and
damping rate
) (r
were unknown, these variables were optimized to minimize the mean
square error with constraints 0
) (
>
r
and 0
] [
0
>
r
E . The optimization allowed for
different internal waves to have different damping rates. Note that Eqs. 3.18 and 3.23
are valid for different types of linear damping, and we did not assume any damping
mechanisms for this fitting.
In order to apply the previously mentioned method to the thermistor chain data,
basin-wide trends of isotherm deepening and average isotherm levels were subtracted
from the instantaneous measurement at each station to obtain a local displacements of
the 25 C and 19 C isotherms (see Fig. 3.2). The 19 C isotherm displacements at Tg,
Tf, T9, and T7 were not used for the fitting because they were below the lowest
thermistor depth for almost half of the observed period. The modal forces
) (
~
r
f were
calculated from Eq. 3.19 using the calculated modal structure (Fig. 3.4 and Fig. 3.5) and
the spatially variable wind field constructed by linearly interpolating the wind data
measured at the eight wind stations (see Fig. 3.1). As the isotherms oscillated
dominantly with ~24 h and ~12 h periods (Antenucci et al. 2000; Gmez-Giraldo et al.
2006; Fig. 2) and ADCP data showed strong current rotating anticyclonically in the
metalimnion (Antenucci et al. 2000), we chose internal waves with these periods
(V2H3C, V1H1C, V1H1A, V1H3C), and one V2 anticyclonic wave (V2H1A). The
modal amplitudes
) ( ~ r
a were calculated in 10-min interval by applying a piecewise
analytic solution (Eq. 3.23) to avoid numerical excitation or damping, and the mean
square error was calculated from Eq. 3.25 with uniform weighting (w
j
= 1) for all
thermistor chain data in order to optimize
) (
0
~ r
a and
) (r
.
Chapter 3. Energetic and damping of internal waves
55
-25
-20
-15
-10
-5
a) Tg
b) Tf
c) T9
I
s
o
t
h
e
r
m
d
i
s
p
l
a
c
e
m
e
n
t
(
m
)
d) T7
e) Tv
171 173 175 177 179 181 183
Day of the year
f) T4
-25
-20
-15
-10
-5
-25
-20
-15
-10
-5
-25
-20
-15
-10
-5
-25
-20
-15
-10
-5
-25
-20
-15
-10
-5
Fig. 3.6. Comparison of 25 C and 19 C isotherm displacements at the six stations. (a) Tg, (b) Tf,
(c) Tg, (d) T7, (e) Tv, and (f) T4. Solid lines: observation (detrended), dashed lines: prediction
based on modal amplitude equations, Eq. 3.18 (used for fitting), and dotted lines: prediction (not
used for fitting).
Application of modal analysis to strongly stratified lakes
56
Table 3.1. Characteristics of basin-scale internal waves in Lake Kinneret. Modal indices (first
column) are assigned in ascending order of the angular frequency over all internal waves
(irrespective of their vertical structure), and the names (second column) are assigned on the basis of
the corresponding internal wave structure in a flat-bottomed elliptical basin (see text).
( ) r
opt
and
( ) r
b
are damping rates estimated respectively by the mode-fitting technique and by using the equivalent
linear bottom friction coefficient (Eq. 3.30). The estimated modal total energy (
[ ] r
E
), rates of energy
input (
[ ] r
W
), and rates of energy dissipation (
[ ] r
D
) averaged over the field campaign are shown in
the last three columns. Abbreviations are V: vertical mode, H: horizontal mode, C: cyclonic wave,
and A: anticyclonic wave.
Numbers in parenthesis indicate angular frequencies with bottom friction. Inertial frequency is
7.83 10
-5
rad s
-1
.
The middle values indicate the optimum damping rates and dissipation rates,
and left and right values show the sensitivity calculated based on 5% increase of the mean square
error (Eq. 3.25). If the upper bound of
( ) r
opt
goes to infinity, the corresponding upper bound of
[ ] r
D
is calculated from the energy input assuming the energy is immediately dissipated.
The estimated damping rates ranged from 3.5 ~ 12 10
-6
rad s
-1
, corresponding to e-
folding damping time (=
1
) (
r
) of 0.96 ~ 3.3 d (Table 3.1). Although the e-folding
damping time appeared comparable with the periods (T =
1
) (
2
r
), the damping rates
were small (3 ~ 9 %) compared to the corresponding angular frequencies, justifying the
assumption of small damping. The observed displacements of 25 C and 19 C
isotherms were well reproduced by the superposition of the five IWs using the estimated
initial amplitudes and damping rates (Fig. 3.6). The 19 C displacements at Tg, Tf, T9,
and T7, which were not used for the fitting, were also predicted well, even though the
mean depths of the isotherms were close to the total depth of these stations (~20 m).
These results suggested that the isotherm displacements could be modeled by the
Index Mode
) (r
(10
-5
rad s
-1
)
( ) r
opt
(10
-6
rad s
-1
)
( ) r
b
(10
-6
rad s
-1
)
[ ] r
E
(GJ)
[ ] r
W
(GJ day
-1
)
[ ] r
D
(GJ day
-1
)
1 V2H1C 2.73 (2.54) - 1.9 - - -
2 V2H2C 5.22 (5.03) - 4.2 - - -
3 V2H3C 7.50 (7.42) 3.7-5.5-9.5 6.1 1.20 1.06 0.90-1.15-1.33
4 V1H1C 7.94 (7.94) 4.7-6.7-10 6.1 1.43 1.35 1.56-1.65-1.65
6 V2H1A 10.1 (10.1) 0.0-3.5- 1.3 0.37 0.24 0.00-0.22-0.24
7 V2H2A 11.4 (11.8) - 3.8 - - -
9 V1H2C 12.6 (12.9) - 12 - - -
10 V2H3A 13.3 (13.4) - 4.5 - - -
14 V1H3C 16.2 (16.1) 0.8-7.4- 14 0.19 0.24 0.08-0.25-0.25
19 V1H1A 17.4 (17.2) 1.4-12- 11 0.21 0.43 0.27-0.43-0.51
Chapter 3. Energetic and damping of internal waves
57
superposition of linear internal waves with their amplitudes being modulated by the
forcing and damping.
Antenucci et al. (2000) suggested that the expansion and contraction of metalimnion
was due to V2H1 anticyclonic wave of ~20 h period; however, the present result
showed that the mode (V2H1A IW) induced very small isotherm displacements and the
expansion and contraction was primarily due to V1H1C and V2H3C IW (Fig. 3.7), the
latter of which had
) (r
= 7.50 10
-5
rad s
-1
(T = 23.5 h) and hence was also near
resonance (Table 3.1) (though the V2H1A IW may have caused the metalimnion jet
observed by Antenucci et al. 2000). Thus, the bathymetry and stratification determine
the structure of internal waves and their periods, but the periodicity of the wind plays a
strong role in selecting which waves are most strongly excited.
-25
-20
-15
-10
-5
a) All
-25
-20
-15
-10
b) V2H3C
-25
-20
-15
-10
c) V1H1C
-25
-20
-15
-10
I
s
o
t
h
e
r
m
d
i
s
p
l
a
c
e
m
e
n
t
(
m
)
d) V2H1A
-25
-20
-15
-10
e) V1H3C
171 173 175 177 179 181 183
-25
-20
-15
-10
Day of the year
f) V1H1A
Fig. 3.7. Decomposition of predicted 25 C and 19 C isotherm displacements at Tf into five internal
wave components. (a) Sum of the five internal waves, (b) V2H3C, (c) V1H1C, (d) V2H1A, (e)
V1H3C, and (f) V1H1A.
Application of modal analysis to strongly stratified lakes
58
3.5.2 Energetics of basin-scale internal waves
Averaged total energy, energy input, and dissipation contained in the five dominant
internal waves during the experiment were, respectively, 3.4 GJ, 3.3 GJ d
-1
, and 3.7 GJ
d
-1
(Table 3.1). The V1H1C IW (Kelvin wave) contained almost half of the total energy,
1.4 GJ, and the V1H1A IW (Poincar wave) contributed 0.21 GJ. These numbers are
considerably smaller than those estimated by Antenucci and Imberger (2001), who
estimated energies 39 and 1.9 GJ for the Kelvin and Poincar waves, respectively, using
analytical solutions in a two-layer-stratified flat-bottomed elliptical basin. This result
illustrates the importance of taking the real bathymetry into account when investigating
the energetics of internal waves in actual basins. The V2H3C IW contained energy
comparable to the Kelvin wave, 1.2 GJ, and V1H3C and V2H1A IWs also contributed
significant amount of energy (see discussion for the sensitivity analysis).
Partitioning of total energy, energy input, and dissipation were estimated from Eqs.
3.17, and 3.20-3.22 (Fig. 3.8). The total energy, indicated by the top of the cumulative
graph, was large at the beginning of the field campaign, then decreased until day 174,
after which it oscillated diurnally. After day 174, the energy input from the wind on
each afternoon increased the total energy, which was dissipated back to almost its initial
value at the previous noon. Given that V2H3C and V1H1C IWs were nearly in
resonance with the wind, the amplitudes were determined by dissipation rate balancing
the rate of wind working, as illustrated by a following simple example. The surface
shear stresses under a spatially uniform wind with an angular frequency
f
may be
written as t
f s
cos
0
= , where
0
is the magnitude of the spatially uniform stresses,
and the temporally averaged modal amplitudes under the stresses are given from the
modal amplitude equations (Eq. 3.18):
( ) ( )
2 / 1
2
) (
2
) (
2
) (
2
) (
) (
0
) (
1
) (
1 1
~
2
,
~
~
|
|
|
\
|
+ +
+
+
=
f
r r
f
r r
r
r
r
e
v
a
(3.26)
where the over bar denotes the temporal average over a period. When a wave is nearly
in resonance (i.e. 1 ~
1
) (
f
r
), the square root in the above equation becomes
Chapter 3. Energetic and damping of internal waves
59
approximately equal to
1
) (
r
, so that the amplitude is determined by a balance between
the damping and the rate of wind working,
0
) (
1
,
~
r
v .
0
2
4
6
8
10
12
E
n
e
r
g
y
(
G
J
)
a)
V1H1A
V1H3C
V2H1A
V1H1C
V2H3C
0
5
10
15
20
25
30
35
40
45
50
A
c
m
.
e
n
e
r
g
y
i
n
p
u
t
(
G
J
)
b)
171 173 175 177 179 181 183
0
5
10
15
20
25
30
35
40
45
50
Day of the year
A
c
m
.
e
n
e
r
g
y
d
i
s
s
i
p
a
t
i
o
n
(
G
J
)
c)
Fig. 3.8. Estimated partitioning of (a) total (available potential plus kinetic) energy, (b)
accumulated rate of work done by winds, and (c) accumulated rate of energy dissipation. The lines
show accumulation for each internal wave, so that the top lines show the sum for the five internal
waves.
Application of modal analysis to strongly stratified lakes
60
The total energy dissipated was almost in balance with the total energy input in each
day; however, their temporal trend within a day showed significant difference. Energy
input occurred every afternoon because of the diurnal westerly winds, while energy
dissipation took place throughout a day. Therefore, basin-scale internal waves slowly
release the energy input by the wind and make it nearly continuously available for
mixing.
3.5.3 Damping of basin-scale internal waves by bottom friction
Damping due to bottom friction was estimated by assuming that the total dissipation
was caused solely by bottom friction. The velocity field was predicted using the time
series of the modal amplitudes calculated by Eq. 3.23 with the optimized
) (
0
~ r
a and
) (r
:
( ) ( ) ( ) ( ) ( ) ( )
=
+ +
+ =
M
r
r r
k
r r
k
pred
k
t a x v t a x v t x v
1
) ( ) ( ) ( ) ( ) ( ~
~
~
~
,
(3.27)
Comparison with the ADCP data by Antenucci et al. (2000) indicated that the estimated
velocity captured the amplitudes and periods reasonably well (not shown).Using this
velocity field, the bottom shear stress may be estimated as
( ) ( ) ( ) t x v t x v C t x
pred
b
pred
b b b
, , ,
) ( ) (
=
(3.28)
where
) ( pred
b
v
is the predicted velocity in the layer adjacent to the bottom and C
b
is the
bottom drag coefficient. Assuming that all the dissipation was caused by work done
against the bottom friction (i.e., ( ) t x v
b b
,
), we can estimate the bottom drag
coefficient averaged over the lake during the field campaign:
( ) dt t x v
dt D
C
pred
b
M
r
r
b
=
=
3
) (
0
1
] [
,
(3.29)
This yielded a bottom friction coefficient of 2.9 10
-3
, which showed good agreement
with a previous estimate for Lake Kinneret, 3.5 10
-3
(Lemckert et al. 2004; note that
this estimate is based on the average velocity in the BBL so that the value tends to be
larger than the estimate based on velocity above the BBL, such as in Eq. 3.29), and
estimates for other lakes, 2 ~ 3 10
-3
(Gloor et al. 2000; Ravens et al. 2000). The results
strongly suggest that that bottom friction was the dominant damping mechanism,
Chapter 3. Energetic and damping of internal waves
61
although the previous analysis does not explain how momentum defect in the BBL
caused by bottom friction is conveyed into the basin-scale internal waves (see 3.7
Discussion).
We estimated the variation of damping rates of internal waves that were not used for
the fitting from the previous result. The equivalent linear friction coefficient was
introduced so that the quadratic and linear friction yielded the same total dissipation
during the field campaign
( )
( )
( )
3
( )
( )
2
( )
,
,
pred
b b
eq
b
pred
b
C v x t dt
c x
v x t dt
=
(3.30)
and the coefficient was substituted into Eq. 3.7 to obtain the corresponding damping
rates. As expected, the results agreed well with the damping rates obtained by the mode
fitting technique for the five fitted internal waves. In general, V1 internal waves
decayed more rapidly than V2 internal waves, as the stronger currents near the bottom
made V1 internal waves more susceptible to bottom friction, whereas V2 internal waves
induced currents concentrated in the metalimnion, resulting in slower damping (Table
3.1; Fig. 3.3c).
3.6 Spatial variability of near-bottom transport processes
The energy available in the BBL drives near-bottom transport processes. Using the
velocity field estimated from the mode-fitting technique (Eq. 3.27), we were able to
investigate spatial variability of some of the near-bottom transport processes, which was
difficult to estimate from microstructure measurements.
First, bottom shear stress, estimated by Eq. 3.28, varied by more than one order of
magnitude with the largest on the western and southern slope at or slightly below the
level of the thermocline (Fig. 3.9a). This implied that resuspended particulate matter
were more likely supplied from these regions, as previously indicated by three-
dimensional hydrodynamic simulations (Marti and Imberger 2006).
Application of modal analysis to strongly stratified lakes
62
a)
-4 -3 -2 -1
log
10
b,90%
(N m
-2
)
b)
-9 -8 -7 -6 -5
log
10
BBL
(m
2
s
-3
)
c) d)
-7 -6 -5 -4
log
10
w
e
, log
10
SW
(m s
-1
)
Fig. 3.9. Spatial distribution of (a) bottom shear stress, (b) dissipation rate averaged in the BBL, (c)
entrainment rate at the top of the BBL, and (d) mass transfer coefficient at the sediment-water
interface. The values shown are 90th percentile for panel (a) and average over the field campaign
for panels (b-d). The BBL thickness is assumed to be a function of depth (Fig. 3.3d), and Sc = 500
(corresponding to O
2
) is used to estimate the mass transfer coefficient. Estimations were made only
below the thermocline for panel (b-d). The entrainment rate may be overestimated near the
perimeter because the strong stratification leads to lower mixing efficiency (Lemckert et al. 2004).
The rate of energy dissipation per unit area was given by work done against friction,
and dividing this by the thickness of BBL yields an average BBL dissipation rate:
( )
( )
( ) x h
t x v C
t x
BBL
b b
BBL
3
,
, =
(3.31)
where h
BBL
is the BBL thickness. The BBL thickness was obtained by interpolating
previous results of direct turbulence measurements (Fig. 3.3d). The estimated
dissipation rate showed considerable variability, with the largest dissipation over the
western and southern shores, where the milder slope induced strong currents in the
bottom layer, and the dissipation was weakest in the middle of the lake and on the
northeastern steep slope (Fig. 3.9b). The dissipation rate showed good agreement with
the dissipation rate measured in the BBL at different locations by Lemckert et al. (2004)
using direct turbulence measurements, although the estimated value appeared about one
order of magnitude larger than the measurement in the deeper hypolimnion, where less
data were available (see Fig. 3.10b).
Chapter 3. Energetic and damping of internal waves
63
-4 -3 -2 -1
40
35
30
25
20
15
log
10
b,90%
(N m
-2
)
D
e
p
t
h
(
m
)
a)
-9 -8 -7 -6 -5
log
10
BBL
(m
2
s
-3
)
b)
-7 -6 -5 -4
log
10
w
e
(m s
-1
)
c)
-7 -6 -5 -4
log
10
sw
(m s
-1
)
d)
Fig. 3.10. Variables shown in Fig. 3.9 expressed as a function of bottom depth. (a) Bottom shear
stress, (b) dissipation rate averaged in the BBL, (c) entrainment rate at the top of the BBL, and (d)
mass transfer coefficient at the sediment-water interface. Open circles show 1-m (arithmetic) bin
average of 90th percentile for panel (a) and average over the field campaign for panels (b-d). The
triangles in panel (b) indicate results of direct turbulent measurements in the BBL at different
locations by Lemckert et al. (2004). The entrainment rate may be overestimated in the metalimnion
(shaded area in panel [c]) because the strong stratification leads to lower mixing efficiency
(Lemckert et al. 2004).
The BBL dissipation rate is related to entrainment rate at the top of the BBL. Gloor
et al. (2000) suggested that ~ 1 % of the dissipated energy in the BBL is converted to
the potential energy through the entrainment. Assuming a well-mixed BBL leads to
( )
( )
( ) ( ) x h x N
t x
t x w
BBL b
BBL mix
e
2
, 4
,
=
(3.32)
where w
e
is the entrainment rate at the top of the BBL, N
b
is the buoyancy frequency at
the top of the BBL, and
mix
is the mixing efficiency (~ 0.01) (Gloor et al. 2000). The
entrainment rate along the perimeter was a few orders of magnitude larger than that in
the middle of the lake (Fig. 3.9c), although use of non-dissipative modes probably
overestimated the entrainment rate near the perimeter.
The mass transfer coefficient at the sediment-water interface is given by
1
=
DSL m SW
D , where
m
D is the molecular diffusivity of the species of interest and
DSL
is the thickness of diffusive sublayer (Steinberger and Hondzo 1999; Lorke et al.
2003). Lorke et al. (2003) suggested that
DSL
was approximately given by the
Batchelor length for the species of interest, ( )
4 / 1
2
/ 2
m m B
D L = , where
m
is the
Application of modal analysis to strongly stratified lakes
64
molecular kinetic viscosity, and is the dissipation rate. They also suggested the
dissipation rate could be evaluated from the law of the wall profile, so that
( )
3
1
f VSL
v
= at the top of the viscous sublayer, where (= 0.41) is the von Karman
constant,
( )
1/ 2
1
0 f b
v
=
is the friction velocity, and
1
11
=
f m VSL
v is the thickness
of the viscous sublayer. Using the previously mentioned relations and Eq. 3.31 leads to
( ) ( )
2 / 1
2 / 1
Sc , 11 . 0 ~ ,
t x v C t x
b b SW
(3.33)
where Sc (=
1
m m
D ) is the Schmidt number. The variability of
SW
was up to one order
of magnitude and much less than that of the dissipation rate and entrainment rate
because of its weak dependence on
b
v
(Fig. 3.9d).
As shown by the above results (Fig. 3.9c,d), mass fluxes in the BBL also shows
considerable spatial variability, a direct result of the spatial structure of velocity induced
by basin-scale internal waves.
3.7 Discussion
We have proposed a technique that extracts damping rates and energy budgets of
individual internal waves from thermistor chain data based on the modal evolutionary
equations for a weakly dissipative system. This extends the previous top-down approach
to investigate energetics in a strongly stratified lake (Gloor et al. 2000; Antenucci and
Imberger 2001) to a lake with irregular bathymetry. Some advantages of this method
include resolution of difference in damping rates and energy budgets of individual
internal waves and the capability to capture spatiotemporal variability of near-bottom
transport processes, which is not easy to obtain from direct turbulence measurements.
As the previously mentioned method is new, it was necessary to examine the
sensitivity of the estimated damping rates. This was done by changing damping rate of a
particular mode from the optimum value while keeping the damping rates of the other
modes and initial amplitudes of all the modes the same until the mean square error
increased by 5 %. The results indicated that this criterion gave lower and upper error
bound of ~30 % and ~60 % for the damping rates of the dominant V2H3C and V1H1C
IWs (Table 3.1). Although these errors appeared large, the corresponding error on total
Chapter 3. Energetic and damping of internal waves
65
dissipation rates was only 10 ~ 20 % because the effect of the damping rate on the
modal amplitude was non-linear (Eq. 3.26; see Fig. 3.11).
The fitting results appeared almost insensitive to the damping rates of V2H1A,
V1H3C, and V1H1A IWs, causing large uncertainty in their energy budgets. This was
not due to the characteristics of the fitting techniques but rather to the nature of
resonating system, as shown in Fig. 3.11. When a wave is nearly in resonance with the
wind, the amplitude is sensitive to the damping rate, while if the forcing frequency is far
from the angular frequency, the amplitude is primarily determined by the ratio of
forcing frequency to the angular frequency, resulting in low sensitivity (Fig. 3.11).
Although the sensitivity of the observed waves would be higher than the result from this
simple analysis because real wind forcing has non-periodic components, this analysis
illustrates why the mean square error was insensitive to the damping rates of the
V2H1A, V1H3C, and V1H1A internal waves.
0 0.5 1 1.5 2
0
3
6
9
12
15
(r)o
(-)
|
H
(
r
)
|
(
-
)
(r)o
=0.025
(r)o
=0.050
(r)o
=0.100
(r)o
=0.150
(r)o
=0.200
V2H3C
V1H1C
V2H1A
V1H3C
V1H1A
Fig. 3.11. Absolute value of temporally averaged frequency response function defined as
) ( ) (
1
) (
1
) ( ~ ~
,
~
r r
s
r r
e a v H
=
. (see Eq. 3.26). Normalized forcing frequency and damping rate are
defined as
f
r
f
1
) (
+
=
and
) (
1
) ( ) ( r r r
+
=
. Dotted lines, respectively, indicate the angular
frequencies of V1H1A, V1H3C, V2H1A, V1H1C, and V2H3C from left to right.
A sensitivity analysis as to the choice of the lower interface was also conducted, as
the depth of this interface appeared rather ambiguous (see Fig. 3.3a-c). The V1 modes
were insensitive to the choice, but the periods of V2 modes changed ~ 30 % by
choosing the 17 C or 21 C isotherm instead of the 19 C isotherm. This consequently
changed the energetics of the system, as the shift in the angular frequency moved
Application of modal analysis to strongly stratified lakes
66
V2H3C away from the resonant condition; however the energy budget of sum of the
two diurnal modes (V2H3C and V1H1C) was relatively insensitive; choosing the 17 C
isotherm resulted in an ~ 30 % increase of the energy in the diurnal modes because the
17 C isotherm had a larger amplitude of oscillation compared to the 19 C and 21 C
isotherms. Overall, the estimation, derived in this paper, indicates that the bottom
friction is the primary cause of the damping, although the range of error on the
dissipated energy (~ 30 %) does not exclude potential contribution from other damping
mechanisms, such as shoaling and breaking.
The top-down approach strongly indicated that damping of basin-scale internal
waves was primarily caused by bottom friction. However, this result has only been
conclusively shown for lakes where the V1 internal waves, which are more susceptible
to bottom friction, dominate (Table 3.1; Fig. 3.3c); V2 internal waves and higher modes
are more likely to be damped in the lakes interior as they induce strong shear in the
metalimnion (Fig. 3.3c). Furthermore, both of these approaches have not answered how
the dissipation in the BBL is communicated with the basin-scale internal waves. The
momentum (and energy) defect occurring in the BBL must be redistributed over the
lake for the basin-scale internal waves to be damped. One possibility is that the BBL
water flux (Imberger and Ivey 1993; Marti and Imberger 2006) exits the BBL and fills
the lake as a whole, carrying the momentum defect with it. However, the observed
quick damping would imply that the lake would become destratified very quickly, so
that this is an unlikely mechanism. Second, internal waves could be radiating energy
away from the boundary as in surface waves. This could possibly be a mechanism for
Poincar-type waves, but not Kelvin waves. Third, the bottom friction decreased the
kinetic energy in the BBL, so the potential energy gained when the kinetic energy is
converted would be less; in other words the waves would be damped through the
pressure term coupling the BBL with the mean flow (Mei and Liu 1973). This is the
most likely explanation, but we offer this only as a conjecture.
Velocity field induced by few dominant internal waves caused spatial variability of
near-bottom transport processes of few orders of magnitude, even after temporal
averages were taken (Fig. 3.9). This result suggests that real lakes should not be
assumed flat-bottomed or horizontally uniform, as the spatial structure of internal waves
strongly depends on the bathymetry. It is also worth noting that this variability is
deterministic since the structure of internal waves is determined by the Earths rotation,
Chapter 3. Energetic and damping of internal waves
67
bathymetry, and stratification and their evolutions are described by simple differential
equations (Eq. 3.18). This implies that variability in the results of microstructure
measurements between different locations (e.g., Lemckert et al. 2004; see Fig. 3.10b)
may result not only from the intermittency of the turbulence but also from this
deterministic spatial variability. Since such variability is difficult to determine solely
with microstructure measurements, the mode-fitting technique would be useful to
understand the variability and to plan a field campaign in order to maximize information
obtained from limited number of measurements.
As previously shown, spatial variability of transport processes is significant and
should not be neglected. For studies focusing on a longer time scale, chemistry, or
biology, however, such variability needs to be taken into account in simpler analysis, for
example, in vertical one-dimensional analysis. For such a purpose, mass flux or rate
constants (such as w
e
and
SW
) may be expressed as a function of bottom depth to
calculate the average of the values corresponding to the same depth (Fig. 3.10). In the
case treated in this paper, for example, use of the vertically uniform mass transfer
coefficient below the thermocline may be justified (Fig. 3.10d), but constant bottom
shear stress (hence resuspension rate), dissipation rate, and entrainment rate (Fig. 3.10a-
c) cannot. The method suggested here better accounts for the horizontal variability of
transport processes in vertical one-dimensional analysis.
One limitation of the methodology used in this paper is the use of non-dissipative
modes for the mode fitting. Although this may be justified, as the damping rates were
small compared to the angular frequencies (Table 3.1), spatial structure of internal
waves may change significantly especially in shallower part, where bottom friction
would decrease the velocity. Once damping mechanisms of internal waves are
determined, dissipative modes can be obtained by solving Eqs. 3.7 and 3.9 using
linearized damping parameters, such as the equivalent linear bottom friction coefficient.
As damping modifies the structure of internal waves and estimated velocity field
changes the equivalent linear bottom friction coefficient, the mode-fitting technique
with dissipative modes requires iterative procedure for (1) calculation of modal
structure, (2) fitting modes to field data, and (3) estimation of damping parameters.
We have presented an extension of the theory of modal analysis for a weakly
dissipative system with linear damping and a method to extract the energetics and
Application of modal analysis to strongly stratified lakes
68
damping rates of individual internal waves from thermistor chain data. The application
to Lake Kinneret revealed that the energy contained in the internal waves was ~ 3 GJ,
resulting from a balance between energy input from the winds and energy dissipation (3
~ 4 GJ d
-1
). The dissipation was primarily by bottom friction, although the exact way
the dissipation in the BBL is communicated to the basin-scale internal waves remains an
open question.
The velocity induced by basin-scale internal waves causes spatial variability in the
bottom shear stress, the entrainment rate at the top of the BBL, and the mass transfer
coefficient at the sediment-water interface of the order of magnitude. Such spatial
variability is deterministic both in space and time and should be taken into account
when near-bottom transport processes are analyzed. The spatial variability may be
compiled to better represent transport processes in simpler analysis, such as vertical
one-dimensional analysis.
Appendix 3.A -- Derivation of modal equations for a weakly dissipative system
As shown by Platzman (1984), the variables
) (r
,
) (r
,
) (
~
r R
,
) (
~
r L
,
) ( ~ r R
a , and
) ( ~ r L
a for a weakly dissipative system can be expanded around variables for the
corresponding non-dissipative system (i.e. 0 = C in Eq. 3.7) as
( ) ( ) ( )
) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ~
,
~
, , 0
~
,
~
, 0 , ~
~
,
~
, ,
r r r r N r N r N r R r R r r
a a a +
(3.A1a)
( ) ( ) ( )
) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ~
,
~
, , 0
~
,
~
, 0 , ~
~
,
~
, ,
r r r r N r N r N r L r L r r
a a a +
(3.A1b)
when damping is small. Here ~ indicates that the equality is valid for small damping;
) (r N
,
) (
~
r N
, and
) ( ~ r N
a are the angular frequency, modal structure, and modal
amplitude for the corresponding non-dissipative modes, respectively; and
) (r
,
) (
~
r
,
and
) ( ~ r
a are the small correction for the damping rate, modal structure, and modal
amplitude, respectively. From 3.A1, it is seen that a criteria for small damping is
1
) (
1
) (
<<
r r N
.
The non-dissipative modes satisfy the orthogonal relationships: (Shimizu et al. 2007)
Chapter 3. Energetic and damping of internal waves
69
s r
r N s N r N
e
,
) ( ) ( ) ( ~
~
,
~
= M
(3.A2)
s r
r N r N s N r N
e
,
) ( ) ( ) ( ) ( ~
~
,
~
= K
(3.A3)
The non-dissipative modal amplitudes can be obtained from Eq. 3.15 by replacing
) ( ~ r R
a ,
) ( ~ r R
e , and
) (
~
r L
by
) ( ~ r N
a ,
) ( ~ r N
e , and
) (
~
r N
, respectively;
) (r
and
) (
~
r
are given by
(Platzman 1984)
) ( ) (
1
) ( ) (
~
,
~
~ r N r N r N r
e i C
=
(3.A4)
) , ( ) ( ) (
~ ~ ~
s r
s
s N r
b =
(3.A5)
where the expansion coefficients
) , (
~
s r
b are given by
( )
=
=
s r for
e
s r for
b r N s N
s N s N r N
s r
) ( ) (
) ( ) ( ) (
) , (
~
,
~
~
1
0
~
C
(3.A6)
To derive Eq. 3.A6, we choose the norm of
) (
~
r R
and
) (
~
r L
to be the normalizing factor
for the corresponding non-dissipative modes (i.e.,
) ( ) ( ) ( ) ( ) ( ~
~
,
~ ~
,
~
r N r L r L r R r R
e = = M M ). As obvious from Eq. 3.15,
) ( ~ r
a are given
by replacing
) ( ~ r R
a ,
) ( ~ r R
e , and
) (
~
r L
in the equation by
) ( ~ r
a ,
) ( ~ r N
e , and
) (
~
r
,
respectively.
Substituting Eqs. 3.A1 and 3.A4 into Eqs. 3.11 and 3.12, and using Eqs. 3.A6 yields
s r
r N s R r L
e
,
) ( ) ( ) (
~
~
,
~
M
(3.A7)
s r
r N r s R r L
e
,
) ( ) ( ) ( ) (
~
~
,
~
K
(3.A8)
s r
r N r s R r L
e i
,
) ( ) ( ) ( ) (
~
~
,
~
C
(3.A9)
Although Platzman (1984) stated that Eqs. 3.A8 and 3.A9 hold in general, we found that
these relations are valid only for small damping. Since K is an Hermitian operator
Application of modal analysis to strongly stratified lakes
70
(Shimizu et al. 2007) and C an anti-Hermitian (as it is imaginary and symmetric), we
have
K K , ' , ' =
(3.A10)
C C , ' , ' =
(3.A11)
Using the above relationships and Eqs. 3.A8 and 3.A9, we get
( ) ( ) ( )
s r
r N r r
H
s R r L r L s R
e i
,
) ( ) ( ) ( ) ( ) ( ) ( ) ( ~
~
~
,
~ ~
,
~
+ = + C K C K
(3.A12)
This leads to the modal amplitude equations for the left modes, Eq. 3.18, following the
same procedure as for the right modes.
Substituting Eq. 3.A1 into Eqs. 3.17, 3.21, and 3.22 indicates that
( ) ( ) ( ) ( ) ( ) ( ) t a t a e t a t a e t E
r N r N r N r N r N r N r ) (
*
) ( ) ( ) (
*
) ( ) ( ] [ ~ ~
2
1
~
+ + +
+
(3.A13)
( ) ( ) ( ) ( ) t x t x v t W
s
r N r
, , , Re 2 ~
) (
1
] [
(3.A14)
( ) ( ) t E t D
r r r ] [ ) ( ] [
2 ~
(3.A15)
Therefore, for small damping, the modal energy, E
[r]
, remain positive definite, and the
estimated energy balance remains approximately the same even if non-dissipative
modes are used (instead of dissipative modes).
Chapter 4. Damping mechanisms of internal waves
71
Chapter 4. Damping mechanisms of internal waves
in a continuously stratified rotating basin
Abstract
Damping mechanisms, damping rates and the dissipative modal structure of internal
waves in stratified rotating circular basins are investigated analytically. The damping is
shown to be due to a combination of internal wave cancelling, where waves emitted by
the oscillatory boundary layers destructively interact with the parent wave and drain
energy from it, and spin-down modified by the periodicity, where the energy is drained
by sinks and sources at the bottom corner caused by a discontinuity in the Ekman
transport. It is shown that super-inertial Poincar waves and sub-inertial Kelvin waves
are damped predominantly by the internal wave cancelling and modified spin-down,
respectively. These processes also modify the internal wave structure; for super-inertial
waves, the boundarylayer-generated waves intensify the interior flow in the lower part
of the water column and delay the phase relative to the isopycnal displacements, but for
sub-inertial waves, the Ekman pumping and the corner sinks and sources add a
horizontal circular flow that slants the crests and troughs backwards near the wall.
4.1 Introduction
This study is motivated by fast damping of internal waves observed in a strongly
stratified rotating lake, where the dominant basin-scale internal waves were damped
within two periods (e-folding time in terms of amplitude) (Shimizu and Imberger In
press) unlike laboratory experiments by Wake et al. (2005), who reported the damping
over 10 ~ 14 periods. Analysing the energy balance, bottom friction was considered as
the primary cause of the damping (Shimizu and Imberger In press). In stratified lakes,
the effect of bottom friction is confined to a relatively thin, well-mixed bottom
boundary layer (West et al. 2000; Lemckert et al. 2004), and the interior remains close
to laminar (Saggio and Imberger 2001); however, the momentum defect (and energy
loss) occurring in the boundary layer must be transferred back into the stratified interior
where most of the momentum (and energy) is stored. Diffusion cannot transfer
To be submitted to Journal of Fluid Mechanics as: Shimizu, K., and J. Imberger. Damping mechanisms
of internal waves in a continuously stratified rotating basin. Centre for Water Research Reference ED
2201-KS.
Application of modal analysis to strongly stratified lakes
72
momentum within a timescale of a few days in a lake with a typical depth of 100 m. In
this paper, we investigate damping of basin-scale internal waves by thin boundary
layers; two well-known damping mechanisms are combined to understand the observed
rapid damping. First, the damping mechanism investigated by Johns (1968) and Dore
(1968) that is relevant for relatively high-frequency basin-scale waves and second, by
the well-known spin-down (Greenspan 1968; Pedlosky 1979; Gill 1982) that applies to
steady circulations and low-frequency motions, such as shelf waves and Kelvin waves
in coastal seas (Romea and Allen 1984; Mitsudera and Hanawa 1988).
Two limits to the problem of this paper have already been well studied. First, if the
wave frequency is much higher than the inertial frequency, then the basin-scale internal
wave in a rotating basin degenerates into a simple internal seiche. Such waves are
damped by the viscosity of the fluid acting in a thin layer underneath the surface, in the
interior of the fluid, and in a thin boundary layer adjacent to the solid walls of the basin;
the damping rates are proportional to
2 / 3
, , and
2 / 1
, respectively (e.g., Ursell 1952),
indicating that damping due to bottom friction dominates in shallow basins (e.g.,
LeBlond 1966). The damping rate is most conveniently calculated by dividing the rate
of energy dissipation by the total energy of the basin-scale seiches (e.g., Lamb 1932;
Ursell 1952). However, how the energy of the basin-scale waves is actually siphoned
from the waves into the thin boundary layers is rather subtle. To understand this
mechanism, it is necessary to carry out a perturbation analysis assuming small viscosity
as discussed by Johns (1968). He showed that the basin-scale seiches locally support, to
first order, a Stokes layer at the bottom boundary. However, spatial variability of the
flow causes the Stokes layer to have a variable thickness and induces a vertical velocity
anomaly at the top of the bottom boundary layer, given by:
( ) v
i
w
E
(4.1)
where w
E
is the velocity anomaly normal to the boundary, 1 = i is the imaginary
unit, is the angular frequency, is the kinematic viscosity, is the spatial gradient
operator parallel to the boundary, and v
is the interior velocity vector parallel to the
boundary. The velocity anomaly may be represented by a line of sinks and sources and
that, at second order, generate basin-scale waves similar to that illustrated by Hurley
and Imberger (1969) when an incident internal wave travels across small bottom
Chapter 4. Damping mechanisms of internal waves
73
undulations. Johns (1968) illustrated that using Eq. 4.1 as a bottom boundary condition
induced a damping rate proportional to
2 / 1
. His method was extended to progressive
internal waves in rotating fluids by Dore (1968), and Mei and Liu (1973) further
showed that the velocity anomaly creates energy flux into the boundary layer.
Second, spin-down of steady circulation or very low frequency motions in a rotating
basin is achieved by the Ekman pumping stretching (or squashing) the water column
and inducing circular flow that cancels the existing circulation through the conservation
of potential vorticity (e.g., Greenspan 1968; Benton and Clark 1974; Duck and Foster
2001). Spin-down induces fast damping (
2 / 1
) compared to damping due to diffusion
of momentum, whose rate is proportional to (Benton and Clark 1974; Duck and
Foster 2001). The Ekman pumping velocity can be calculated by the Ekman
compatibility condition (Greenspan 1968):
( ) v
f
w
E
=
2
(4.2)
where w
E
is the Ekman pumping velocity, and f is the Coriolis parameter or inertial
frequency (twice the angular velocity of the basin). In a stratified fluid, the motion in
the interior is not completely brought to rest by such a mechanism, as the stratification
prevents the Ekman transport from moving up or down the vertical sidewall boundary
layer; a diffusion mechanism is required for the complete damping (Benton and Clark
1974; Duck and Foster 2001).
Low-frequency motions, such as shelf waves and/or Kelvin waves may also be spun-
down, although the unsteady inertia slightly modifies the process (Gill 1982). For a flat
bottom basin, the compatibility condition extended to low-frequency motions is given
by (Gill 1982):
( ) ( )
+
=
|
|
\
|
+
f
t
w f
t
E
2
2
2
(4.3)
where
is the bottom shear stress vector.
Interestingly, Eq. 4.3 reduces to Eqs. 4.1 and 4.2 in the high- and low-frequency
limits, if we note that the bottom shear stress under the Stokes and Ekman boundary
Application of modal analysis to strongly stratified lakes
74
layers are v i
and v f
2 / , respectively. This suggests that damping of rotating
basin-scale internal waves may possibly be modelled by coupling the velocity anomaly
at the top of the boundary layers to the interior wave motion; the damping mechanism
would then be the combination of the internal wave cancelling and spin-down. Brink
(1988) applied Eq. 4.3 to super-inertial gravity waves, although his solution was
confined to progressive super-inertial gravity waves.
This study is aimed at obtaining an understanding of the fundamental processes that
determine the observed damping rates of rotating basin-scale internal waves. We limit
our analysis to a flat-bottomed basin with vertical walls and constant rotation,
containing a weakly stratified fluid (in the Boussinesq sense) with constant small
viscosity. The solution is obtained through perturbation analysis, which arises naturally
when the rotation rate is assumed finite and the viscosity is small (e.g., van Dyke 1964).
This paper is structured as follows. First, we derive dynamics of the oscillatory
boundary layers on the flat bottom and the vertical sidewall in a stratified rotating basin.
Then, a perturbation method is developed that incorporates velocity anomaly at the top
of the boundary layers (referred hereafter as the Ekman normal velocity) as a boundary
condition to the basin-scale internal waves in the basins interior. Next, the resulting
perturbation method is applied to a non-rotating rectangular basin to illustrate the
internal wave cancelling concept and then this is generalized to the case where both
internal wave cancelling and spin-down contribute to the damping. The limitation and
possible extension of the method proposed in this paper are discussed at the end.
4.2 Governing equations and scaling
Consider the damping of small amplitude basin-scale internal waves in a shallow
basin with vertical sidewalls and rotating parallel to the vertical axis with an angular
frequency f/2 (f is assumed positive throughout this paper). Let z be the upward
coordinate with origin at the water surface, and x and y be horizontal coordinates fixed
to the rotating frame of reference. In order to separate the hydrostatic pressure field
from the solution, we set the density and pressure such that:
( ) ( ) ( )
+ + + + + + + + +
+ + = t x z t x
e
, ' ,
0
(4.4a)
Chapter 4. Damping mechanisms of internal waves
75
( ) ( ) ( )
+ + + + + + + +
+ = t x p z p t x p
e
, ' ,
(4.4b)
where x
= (x, y, z) is the Cartesian coordinate vector, t is the time, is the density, and
p is the pressure. Variables with a subscript 0 and e represent a nominal value and
vertical variations at equilibrium, respectively. The prime on a variable denotes
variation due to the motion and
+
in the superscript indicates a dimensional variable.
Substituting Eq. 4.4 into the Navier - Stokes equation, subtracting the hydrostatic
pressure balance and assuming that the stratification is weak (
+ + +
<<
0
, '
e
) and that
the fluid has a constant kinematic viscosity, , and diffusivity of mass, D, the
governing equations for the wave motion become
0 =
+
v
(4.5a)
+ + +
+
+ +
+
+
+ = +
' '
'
2
2
0
D w N
g
v
t
(4.5b)
( )
+ +
+
+ +
+
+ +
+
+
+ = +
v k
g
v k f p v v
t
v
2
0 0
' '
1
(4.5c)
where k
is the vertical unit vector, v
= (u, v, w) is the velocity vector, g is the
acceleration due to gravity,
( )
+
+
+
+ +
=
z
g
z N
e
0
(4.6)
is the buoyancy frequency, and is the spatial differential operator.
Further, we assume that the basin-scale internal waves have an angular frequency of
O(
0
) and a small isopycnal displacement of O(a
0
). Further, the basin is assumed to
have a flat-bottom, vertical sidewalls, and a depth H that is small compared to the
horizontal length scale L but large compared to a
0
. The basin is filled with a
continuously stratified fluid with the typical buoyancy frequency N
0
. Given these scales,
we may introduce the following non-dimensional variables:
( )
|
|
\
|
=
+ + +
H
z
L
y
L
x
z y x , , , ,
(4.7a)
Application of modal analysis to strongly stratified lakes
76
( )
|
|
\
|
=
+ + +
A a
w
a
v
a
u
w v u
0 0 0 0 0 0
, , , ,
(4.7b)
+
= t t
0
(4.7c)
0
N
N
N
+
=
(4.7d)
where the scale for the vertical velocity is determined by balancing the terms in Eq.
4.5a, and A = H/L is the aspect ratio of the basin, assumed to be small. Substituting Eq.
4.7 into Eqs. 4.5b,c, and balancing the unsteady terms with the first term on the right-
hand-side in Eq. 4.5b and the pressure term in Eq. 4.5c requires that the density and
pressure to be non-dimensionalized as follows:
A a N
g
0
2
0 0
'
'
+
+
=
,
L a
p
p
2
0 0 0
'
'
+
+
=
(4.8)
Given we have assumed that A<<1 and a
0
< H, it follows that a
0
/L << 1 and so the
nonlinear terms in Eq. 4.5 that are O(a
0
/L), may thus be neglected. With this
assumption, Eqs. 4.5a-c become:
0 =
z
w
y
v
x
u
(4.9a)
(
(
+
|
|
\
|
+ =
2
2
2
2
2
2
2 2
' ' '
'
z y x
A
S Sc
E
w N
t
(4.9b)
(
(
+
|
|
\
|
+ +
2
2
2
2
2
2
2
1 '
z
u
y
u
x
u
A
S
E
v
S x
p
t
u
(4.9c)
(
(
+
|
|
\
|
2
2
2
2
2
2
2
1 '
z
v
y
v
x
v
A
S
E
u
S y
p
t
v
(4.9d)
(
(
+
|
|
\
|
2
2
2
2
2
2
2
2
2
2
'
'
z
w
y
w
x
w
A
S
EA
S
B
z
p
t
w
A
(4.9e)
Chapter 4. Damping mechanisms of internal waves
77
where ( )
1
2
= fH E is the Ekman number,
0
1
= f S is the Burger number,
2
2
0
2
A N f B
= is the stratification parameter and
1
= D Sc is the Schmidt number.
The terms of O(A
2
) are retained as they enter the force balance in the sidewall boundary
layers, discussed later. Note that the parameter (E/S) is ( )
1
2
0
H and independent of f.
Note that the angular frequency of basin-scale internal waves are O(C/L), where C is
the celerity of internal wave of interest, so S may also be defined as C(fL)
-1
(see also
Antenucci and Imberger 2001; Stoker and Imberger 2003). Note also that the second
term on the right-hand-side of Eq. 4.9e has to be O(1) for internal waves, implying B =
O(S
2
). Assuming small viscosity and a shallow basin, we consider the parameter ranges,
(E/S) <<1, A << 1, and B = O(S
2
) in this paper.
4.3 Ekman normal velocities induced by oscillatory boundary layers
By way of introduction, we shall consider the boundary layer formed on the flat
bottom and the plane vertical sidewall forced by basin-scale internal waves. The
solutions may be applied locally to curved sidewalls in a circular basin assuming the
boundary layer is thin compared to the radius of curvature.
4.3.1 Bottom boundary layer
In order to focus on an oscillatory boundary layer on a flat bottom, we stretch the
vertical coordinate and vertical velocity so that we get a balance between the vertical
diffusion terms in Eqs. 4.9c,d and the unsteady terms; ( ) ( ) 1 /
2 / 1
+ =
z S E Z and Eq. 4.9a
implies ( ) w S E W
2 / 1
/
= . Substituting the stretched variables into Eq. 4.9e and
neglecting all terms smaller then or equal to O([E/S]
1/2
) shows that the pressure does not
vary across the bottom boundary layer, and the flow in the bottom boundary layer is, to
first order, horizontal. In order to simplify the solution process, it is convenient to
consider the deviation of boundary layer velocity from the far field value (i.e., the
Ekman velocity [Gill 1982]), such as u
E
= u - u
I
, where the subscripts E and I represent
the Ekman and far field values, respectively. We seek a periodic solution of the form:
( ) ( )
t i
e x t x
= ,
(4.10)
Application of modal analysis to strongly stratified lakes
78
where represents any of the variables and is the angular frequency that is
assumed to scale with
0
. Assuming such a solution exists and neglecting all terms
smaller then or equal to O([E/S]
1/2
), equations Eqs. 4.9c,d leads to the following
expressions for the Ekman velocities:
2
2
1
Z
u
v
S
u i
E
E E
+ =
,
2
2
1
Z
v
u
S
v i
E
E E
+ =
(4.11a,b)
The no slip condition at the bottom requires:
( ) ( )
I I E E
v u v u , , =
at Z = 0 (4.12)
and the Ekman velocity must vanish away from the bottom so the velocity in the
boundary layer matches the far field velocity:
( ) ( ) 0 , 0 , =
E E
v u
at Z (4.13)
leading to the solution (Hunt and Johns 1963):
( ) ( ) [ ] ( ) ( ) [ ] { }
I I E
v Z Z i u Z Z u
+ +
+ = exp exp exp exp
2
1
(4.14a)
( ) ( ) [ ] ( ) ( ) [ ] { }
I I E
u Z Z i v Z Z v
+ +
+ + = exp exp exp exp
2
1
(4.14b)
where ( )
1
= S i . The solution represents two counter-rotating components with
different vertical scales,
2 / 1
1
+ S and
2 / 1
1
S for the cyclonic (rotating in the
same direction as the basin) and anticyclonic components, respectively (Mofjeld 1980).
When the frequency is much higher than f (or S >> 1), the solution reduces to the Stokes
oscillatory boundary layer whereas, when the frequency is much lower than f (or S <<
1), it reduces to the Ekman layer (Fig. 4.1). The horizontal Ekman transport, q
Ex
and q
Ey
(scales with [ ]
0
2 / 1
0
a ), is obtained by vertically integrating Eqs. 4.14a,b:
I
bt bl
I
bt bl
Ex
v
S
c i c S
u
S
c S c i
q
2 2
1
2 2
1
+
=
(4.15a)
Chapter 4. Damping mechanisms of internal waves
79
I
bt bl
I
bt bl
Ey
u
S
c i c S
v
S
c S c i
q
2 2
1
2 2
1
+
=
(4.15b)
where
( )
+
+ =
2
1
bl
c
,
( )
+
=
2
i
c
bt
(4.16)
The Ekman transport becomes large and exhibits a jump in phase, when the frequency is
equal to the inertial frequency (Fig. 4.2). The Ekman normal velocity may be obtained
by vertically integrating the Ekman part of Eq. 4.9a and substituting Eqs. 4.15a,b into
the equation, yielding
(
(
|
|
\
|
+
|
|
\
|
+
|
\
|
=
y
u
x
v
S
c i c S
y
v
x
u
S
c S c i
S
E
w
I I
bt bl
I I
bt bl
E
2 2
1
2 2
1 2 / 1
(4.17)
-2 -1 0 1 2 3 4 5 6 7 8 9 10 11 12
0
2
4
6
8
10
(a) (b) (c) (d) (e) (f) (g) (h) (i)
u
E
/u
I
, v
E
/u
I
Z
u
E
v
E
Fig. 4.1. Ekman velocities, (u
E
, v
E
), when (u
I,
v
I
) = (1, 0) and t = 0 (see Eq. 4.14). Profiles (a) to (i)
correspond to S =
* 1
f
= 0.30, 0.70, 0.90, 0.99, 1.00, 1.01, 1.10, and 3.00 with 1.5 offset for each
profile. Profiles (a) and (i) are almost identical to the Ekman layer and the Stokes layer,
respectively. Note the sharp transition of the structure near S = 1.00.
Application of modal analysis to strongly stratified lakes
80
0.1 1 10 100
-3
-2
-1
0
1
2
3
S ||
|
|
1
/
2
q
E
(a) q
Ebx
q
Eby
q
Ewy
0.1 1 10 100
S ||
(b)
Fig. 4.2. Ekman transport in the rotating bottom boundary layer, (
Ebx
q
,
Eby
q
), and sidewall
boundary layer,
Ewy
q
, when (u
I,
v
I
) = (1, 0). (a) Real part (in phase with the far field flow) and (b)
imaginary part (quarter period ahead of the far field flow). In panel (b), solid and dashed lines
coincide for
1 < S
.
4.3.2 Sidewall boundary layer
It is known that a sidewall boundary layer forced by gravity waves is the Stokes
layer (e.g., Ursell 1952), but when the flow becomes steady, it becomes the sidewall
boundary layers derived by Stewartson (1957) and Barcilon and Pedlosky (1967a,b)
depending on relative strength of the stratification. Here we investigate the sidewall
boundary layer structure induced by rotating basin-scale internal waves when the no slip
boundary condition is imposed at the vertical wall face. The coordinate x is taken as
positive into the fluid. In order to balance the unsteady terms in Eq. 4.9d with the
diffusion terms normal to the wall, we stretch x using the Stokes layer thickness as
( ) x A S E X
1 2 / 1
/
= , and conservation of volume (Eq. 4.9a) implies
( ) u A S E U
1 2 / 1
/
= . As already discussed, the factor (E/S) is independent of f.
Substituting these stretched variables and neglecting terms smaller than or equal to
O([E/S]
1/2
) and O(A
2
), equations Eqs. 4.9a-e become:
0 =
z
w
y
v
X
U
(4.18a)
2
2
2
'
1
'
X Sc
w N i
+ =
(4.18b)
v
S
A E
X
p
2 / 3
1/2
'
0 +
=
(4.18c)
Chapter 4. Damping mechanisms of internal waves
81
2
2
2 / 3
1/2
'
X
v
U
S
A E
y
p
v i
=
(4.18d)
'
'
0
2
S
B
z
p
=
(4.18e)
Eq. 4.18c indicates that the Coriolis force modifies the pressure across the boundary
layer, whenever E
1/2
AS
-3/2
= ( ) f L
2 / 1
1
2 / 3
0
~ 1. In what follows, we make the
assumption that
3 2
S EA <<
(4.19)
so that the pressure is constant across the layer. In order to solve Eqs. 4.18a-e, we once
again split the flow into the far field flow and the derivation from it as before (i.e.,
I E
v v v = ,
I E
w w w = ,
I E
' ' ' = ). As the pressure is constant across the layer,
Eq. 4.18e implies
E
' = 0, and together this yields w
E
= 0 from Eq. 4.18b. From this it
follows that we only need to consider horizontal motion along the vertical wall,
governed by Eq. 4.18d. The solution to the Ekman part of Eq. 4.18d with the boundary
conditions,
I E
v v =
at X = 0 (4.20a)
0 =
E
v
as X (4.20b)
is given by the Stokes oscillatory boundary layer solution (e.g., Pedlosky 1979). The
Ekman transport and Ekman normal velocity may be calculated by integrating the
solution across the boundary layer. Using Eq. 4.18a, this yields:
I
sw
Ey
v
ic
q
=
,
0 =
Ez
q
(4.21a,b)
y
v ic
A
S
E
u
I sw
E
\
|
=
2 / 1
(4.22)
where q
Ez
is the vertical Ekman transport and
i =
sw
c
(4.23)
Application of modal analysis to strongly stratified lakes
82
Although the vertical sidewall boundary layer does not support the vertical Ekman
transport when the fluid is stratified, horizontal divergence of the Ekman transport does
induce an Ekman normal velocity. Unlike the bottom boundary layer, the Ekman
transport in the vertical sidewall boundary layer does not show any transition at the
inertial frequency (Fig. 4.2). It is important to note that, although stratification does not
appear in the boundary layer solution explicitly, it is important in suppressing the
vertical motion in the sidewall boundary layer.
4.3.3 Bottom corner region
An important implication of the above results is that the horizontal bottom Ekman
transport (q
Ex
in Eq. 4.15a with u
I
= 0 and v
I
0) cannot simply enter the vertical
sidewall boundary layer as, from Eq. 4.21b, q
Ez
= 0 there. As in the stratified spin-down
problems, the horizontal bottom Ekman transport must somehow be communicated into
the interior to satisfy the conservation of mass (e.g., Walin et al. 1969; Benton and
Clark 1974). It is not easy to obtain analytical solutions for the flow details in the corner
region, but this region effectively acts as sinks and/or sources of fluid for the interior
flow (Walin et al. 1969). In our case, the sinks and sources are oscillating in time, which
may induce source flow when the frequency is low as in stratified spin-down (Walin et
al. 1969), but may radiate internal wave rays when the frequency is higher than the
inertial frequency (Lighthill 1978; Gill 1982). Considering the limiting case where this
region is small, the sinks and sources may be conveniently modelled using the Dirac
delta function representation (Spence et al. 1992; Duck and Foster 2001). In our case,
the additional vertical Ekman normal velocity at the bottom corner can be determined
from Eq. 4.15a by setting u
I
= 0:
( ) x v
S
c c S
S
E
w
I
bt bl
E
2 2
1 2 / 1
i
\
|
=
(4.24)
We have assumed the sources induce vertical velocity for convenience, but the angle of
the flow is irrelevant for our purposes as it affect the interior flow only as a volume
source.
Chapter 4. Damping mechanisms of internal waves
83
4.4 Perturbation analysis of damped internal waves
We employ a perturbation analysis to obtain a solution for damped internal waves, as
suggested by Greenspan (1968), Johns (1968), and Duck and Foster (2001); viscosity is
assumed small so it affects the solution only through the Ekman normal velocity. The
solution method exploits the orthogonality of the three-dimensional normal modes that
make up the inviscid solution of Eq. 4.9; the orthogonality is derived in Appendix A.
Similar methods have been used to calculate damped coastal trapped waves by Brink
and Allen (1978), Brink (1982), and Clarke and Van Gorder (1986). The derivation
below, given in Cartesian coordinates, is valid for basins of any arbitrary horizontal
shape provided that the bottom is flat, sidewall is vertical, and assumptions we have
made so far are satisfied.
Consider a basin-scale internal wave with the angular frequency as an inviscid
solution to Eq. 4.9. Neglecting the diffusion terms, Eqs. 4.9b,d may be combined to
yield
w
S
BN
z
p
i
2
2
'
0
=
(4.25)
Deleting w from the above equation and Eq. 4.9a yields
|
|
\
|
=
|
|
\
|
y
v
x
u
z
p
BN
S
z
i
'
2
2
(4.26)
Assuming small displacement at the surface, the surface boundary condition may be
assumed to be given by
z
p
BN
S c
i
w c
p
= =
'
'
2
2
2
) 0 (
2
) 0 (
at
0 = z
(4.27)
where
) 0 (
c is the celerity for surface waves and Eq. 4.25 is used to relate w with p. The
boundary conditions at the bottom and sidewall are determined by the Ekman normal
velocities as
E
w
z
p
BN
S
i =
'
2
2
at z = -1 (4.28a)
Application of modal analysis to strongly stratified lakes
84
E y x
u vn un = +
at the sidewall (4.28b)
where (
x
n ,
y
n ) is the horizontal unit outward normal vector at the vertical sidewall, and
w
E
and u
E
are obtained from Eqs. 4.17, 4.22, and 4.24. In order to take advantage of
orthogonality of the inviscid modes later, we add Eq. 4.26 and 4.28a multiplied by
( ) 1 + z . Then, following Platzman (1972) and Shimizu et al. (2007), we write the
resulting equation with Eq.4.9c,d as a matrix equation:
b
f K M + =
(4.29a)
|
|
|
\
|
=
v
u
p'
,
( )
|
|
|
\
| +
=
0
0
1
E
w z
i
b
f
(4.29b,c)
( )
|
|
|
|
|
|
|
|
|
\
|
|
|
\
|
+ +
=
1 0 0
0 1 0
0 0 1
2
2
z BN
S
z
z
M
(4.29d)
|
|
|
|
|
|
|
\
|
=
0
1
1
0
0
S y
S x
y x
i K
(4.29e)
We solve the above equation for (p, u, v) with the boundary conditions, Eq. 4.27 and
4.28 by expanding the variables in a perturbation series in the small parameter (E/S).
4.4.1 Inviscid solutions
Using vertical modes, the homogeneous solutions to Eq. 4.29 may be written as (e.g.,
Gill 1982):
Chapter 4. Damping mechanisms of internal waves
85
( )
( )
( )
( )
( )
( )
( ) |
|
|
|
\
|
=
|
|
|
\
|
=
y x v
y x u
y x c
z
z y x v
z y x u
z y x p
m l
m l
m l l
l
m l
m l
m l
m l
,
,
,
, ,
~
, ,
~
, , '
~
~
) , (
) , (
) , (
2
) (
) (
) , (
0
) , (
0
) , (
0
) , (
0
(4.30)
where the subscript 0 is used to denote inviscid modes, l and m in the superscript denote
l
th
vertical, m
th
horizontal mode,
) (
l
is the vertical modes in a continuously stratified
fluid,
) , ( m l
,
) , ( m l
u
, and
) , ( m l
v
represent horizontal variations of the pressure and
velocities, respectively, and
) (l
c is the celerity of l
th
vertical mode (non-dimensionalized
by
0
L ). The surface mode is given by l = 0 and l > 0 represent internal wave modes.
The vertical modes
) (
l
and their associated celerities
) (l
c are determined from the
solution of (e.g., Gill 1982):
0
) (
) (
2
2
2
) (
= +
|
|
\
|
l
l
l
z BN
S
z
c
(4.31)
with boundary conditions,
0
) (
) (
2
2
2
) 0 (
= +
l
l
z BN
S c
at z = 0 (4.32a)
0
) (
=
z
l
at z = -1 (4.32b)
The vertical modes satisfy the orthogonality condition (e.g., Gill 1982):
l p
l
KE
l p
dz
,
) (
0
1
) ( ) (
=
(4.33)
where
j i,
(= 1 if i = j but 0 otherwise) is the Kronecker delta and
) (
l
KE
(scales with
H
+
0
) is the arbitrary normalization factor for l
th
vertical mode.
The horizontal modal structures or eigenfunctions, ( )
) , ( ) , ( ) , (
, ,
m l m l m l
v u
, are
determined from the shallow water equations corresponding to individual vertical
modes (e.g., Gill 1982):
Application of modal analysis to strongly stratified lakes
86
|
|
\
|
=
y
v
x
u
i
m l m l
m l m l
) , ( ) , (
) , ( ) , (
0
(4.34a)
) , (
) , (
2
) ( ) , ( ) , (
0
1
m l
m l
l m l m l
v
S x
c u i
(4.34b)
) , (
) , (
2
) ( ) , ( ) , (
0
1
m l
m l
l m l m l
u
S y
c v i
(4.34c)
with the boundary condition:
0
) , ( ) , (
= +
y
m l
x
m l
n v n u
at the sidewall (4.35)
The solutions represent horizontal modes that have a distinct horizontal modal structure,
( )
) , ( ) , ( ) , (
, ,
m l m l m l
v u
and angular frequency
) , (
0
m l
(Proudman 1929; Platzman 1972;
Shimizu et al. 2007). The solutions occur in conjugate pairs unless
) , (
0
m l
= 0. We
designate a solution with positive angular frequency with a plus sign in the superscript,
( )
) , ( ) , ( ) , ( ) , (
0
, , ,
m l m l m l m l
v u
+ + + +
, and its conjugate pair, ( )
) , ( ) , ( ) , ( ) , (
0
, , ,
m l m l m l m l
v u
, with
a minus sign. The relationship between the two is given by (Platzman 1972):
( ) ( )
*
) , (
*
) , (
*
) , ( ) , (
0
) , ( ) , ( ) , ( ) , (
0
, , , , , ,
m l m l m l m l m l m l m l m l
v u v u
+ + + +
=
(4.36)
where
*
stands for the complex conjugate; if the superscript does not have a plus or
minus sign, then the relationship applies to both the modes. Distinction between +m and
m modes is necessary when the horizontal modes are used for a series expansion
(Platzman 1984; see Eq. 4.41). Eqs. 4.34b,c suggests that
) (l
c should be O(1) for the
wave of interest, as we are interested in internal gravity waves influenced by rotation.
Therefore, we hereafter set C L
1
0
= , where C is the celerity of the wave of interest.
The three-dimensional modes satisfy the general orthogonality relationships of the
form (see Eq. 4.A11 in Appendix 4.A):
( )
m q l p
m l m l
H
q p
e dV
, ,
) , ( ) , (
0
) , (
0
~
~ ~
=
M
(4.37a)
( )
m q l p
m l m l m l
H
q p
e dV
, ,
) , ( ) , (
0
) , (
0
) , (
0
~
~ ~
=
K
(4.37b)
Chapter 4. Damping mechanisms of internal waves
87
where , M and, K are defined in Eq. 4.29, H in the superscript stands for conjugate
transpose, dV = dxdydz is the volume element, p and q in the superscript are modal
indices that are independent from l and m, and
) , ( ~ m l
e (scaling with
2
0
2
0
a HC
+
) is an
arbitrary normalization factor for the (l, m) mode; this is the norm that is equivalent to
twice the total energy of the mode (see Eqs. 4.A5 and 4.A11).
4.4.2 Correction to the inviscid basin-scale internal waves due to boundary layer
presence
Since the Ekman normal velocities are O([E/S]
1/2
), we focus on one mode, say (l, m)
mode, and look for small viscous corrections to the angular frequency and modal
structure. The variables in Eqs. 4.27-4.29 may be expanded as a perturbation series:
( ) + + =
) , (
1
2 / 1 ) , (
0
/
m l m l
S E
(4.38a)
( ) + + =
) , (
1
2 / 1 ) , (
0
~
/
~
m l m l
S E
(4.38b)
( ) + + =
) , (
1
2 / 1 ) , (
0
~
/
~ m l
E
m l
E E
u S E u u
(4.38c)
( ) + + =
) , (
1
2 / 1 ) , (
0
~
/
~ m l
E
m l
E E
w S E w w
(4.38d)
where the subscript 1 indicates 1
st
order viscous correction and
) , (
0
~ m l
E
u and
) , (
0
~ m l
E
w are
determined from Eqs. 4.17, 4.22, and 4.24 by setting ( ) ( )
) , (
0
) , (
0
~
,
~
,
m l m l
I I
v u v u = . The 1
st
order correction to the modal frequency
) , (
1
m l
is a complex variable, the real and
imaginary parts of which give the 1
st
order correction to the angular frequency and the
damping rate, respectively. Substituting the above expansions into Eq. 4.29 and
collecting the terms of O([E/S]
1/2
), we get
) , (
0
) , (
1
) , (
1
) , (
0
) , (
0
) , (
1
~ ~ ~ ~
m l m l m l m l m l m l
b
f K M M + = +
(4.39)
where
) , (
0
~
m l
b
f is determined by substituting
) , (
0
~ m l
E
w into the definition given by Eq. 4.29c.
The boundary conditions, Eqs. 4.27 and 4.28 become
z
p
BN
S c
p
m l
m l
=
) , (
1
2
2
2
) 0 (
) , (
1
'
~
'
~
at z = 0 (4.40a)
Application of modal analysis to strongly stratified lakes
88
) , (
0
) , (
1
2
2
) , (
0
~
'
~
m l
E
m l
m l
w
z
p
BN
S
i =
at z = -1 (4.40b)
) , (
0
) , (
1
) , (
1
~ ~ ~ m l
E y
m l
x
m l
u n v n u = +
at sidewall (4.40c)
Since the inviscid solutions form a complete set of functions (see Appendix 4.A), the
1
st
order correction to the modal structure,
) , (
1
~
m l
, can be expressed as a superposition of
the inviscid modes:
=
+
=
=
0
) , )( , ( ) , (
0
) , (
1
~ ~ ~
s t
t s m l t s m l
b
(4.41)
where
) , )( , (
~
t s m l
b is the amplitude of (s, t) mode contained in the 1
st
order correction to
(l, m) mode. Following Platzman (1984), equations that determine
) , (
1
m l
and
) , )( , (
~
t s m l
b
can be obtained as follows. First, we multiply Eq. 4.39 by the complex conjugate of the
modal structure function of a particular inviscid mode, say the (p, q) mode, and
integrate the resulting equation over the basin, yielding
( ) ( )
( ) ( )
+ =
+
dV dV
dV dV
m l
b
H
q p m l
H
q p
m l
H
q p m l m l
H
q p m l
) , (
0
) , (
0
) , (
1
) , (
0
) , (
1
) , (
0
) , (
0
) , (
0
) , (
0
) , (
1
~ ~ ~ ~
~ ~ ~ ~
f K
M M
(4.42)
Second, we integrate the first term on the right-hand-side by parts, so that (see Eq. 4.A8
in Appendix 4.A)
( ) ( ) ( ) dV dl dz u p i dV
m l
H
q p m l
E
q p m l
H
q p
(
+ =
) , (
1
) , (
0
0
1
) , (
0
) , (
0
) , (
1
) , (
0
~ ~
~
'
~
~ ~
K K
(4.43)
where Eq. 4.40c has been applied, dl is the length element along the sidewall and the
integral in the first term on the right-hand-side is taken along the sidewall. Further, we
expand
) , (
1
~
m l
using Eq. 4.41 and then apply Eq. 4.37a and the conjugate transpose of
Eq. 4.37b to the left-hand-side of Eq. 4.42 and the second term on the right-hand-side of
Eq. 4.43, respectively, to get the equation:
( )
( ) ( )
+ =
+
dV dzdl u p i
b e e
m l
b
H
q p m l
E
q p
t s m l q p q p m l
m q l p
m l m l
) , (
0
) , (
0
0
1
) , (
0
*
) , (
0
) , )( , ( ) , ( ) , (
0
) , (
0 , ,
) , ( ) , (
1
~ ~
~
'
~
~
~ ~
f
(4.44)
Chapter 4. Damping mechanisms of internal waves
89
This equation may be decomposed into vertical modal components by substituting Eq.
4.30 and using the orthogonalty of the vertical modes (Eq. 4.33) yielding
( )
( )
( ) ( ) ( ) [ ]
+
=
+
dxdy w w ic
dl u ic
b e e
m l
sp E
m l
iwc E
q p p p p
l p
m l
sw E
q p l
KE
p
q p m l q p q p m l
m q l p
q p m l
) , (
,
) , (
,
*
) , ( ) ( ) (
2
) (
,
) , (
,
*
) , ( ) (
2
) (
) , )( , ( ) , ( ) , (
0
) , (
0 , ,
) , ( ) , (
1
1 1
~
~ ~
(4.45)
In the above equation,
) , (
,
m l
iwc E
w
,
) , (
,
m l
sp E
w
, and
) , (
,
m l
sw E
u
are the bottom and sidewall Ekman
normal velocities calculated from the compatibility conditions (Eqs. 4.17, 4.22, and
4.24):
|
|
\
|
+
=
y
v
x
u
S
c S c i
w
m l m l
m l
bt bl
m l
m l
iwc E
) , ( ) , (
2
2
) , (
0
1 ) , (
0
) , (
,
(4.46a)
( ) ( )
(
(
+
|
|
\
|
sw y
m l
x
m l
m l m l
m l
bt
m l
bl
m l
sp E
x x s v s u
y
u
x
v
S
c i c S
w
) , ( ) , (
) , ( ) , (
2
2
) , (
0
) , (
0
1
) , (
,
(4.46b)
|
|
\
|
=
y
m l
x
m l
m l
sw m l
sw E
s
y
v
s
x
u
ic
A u
) , ( ) , (
) , (
0
) , (
,
at the sidewall (4.46c)
where ( )
y x
s s , is the horizontal unit vector tangential to the sidewall (positive when the
wall is to the right), and
sw
x
indicates the location of the sidewall. We have rather
arbitrarily split the bottom Ekman normal velocity into two parts, such that
) , (
,
m l
sp E
w
accompanies the sinks and sources at the bottom corner and
) , (
,
m l
iwc E
w
is independent from
it. As shown later,
) , (
,
m l
iwc E
w
and
) , (
,
m l
sp E
w
are related to the internal wave cancelling and
modified spin-down, respectively. Note that the integrals of
) , (
,
m l
iwc E
w
and
) , (
,
m l
sp E
w
over the
basin vanish from Gauss and Stokes theorem and the boundary condition (Eq. 4.35),
meaning that the mass in the interior (hence in the boundary layer) is conserved and that
the sinks and sources at the corner are necessary to achieve this balance.
Setting p = l and q = m in Eq. 4.45 yields an expression for
) , (
1
m l
. Noting that
) , ( ~ m l
e
is twice the total energy and that the left-hand-side is the complex rate of work done by
the leading mode to the boundary layer (i.e., pressure times velocity normal to the
Application of modal analysis to strongly stratified lakes
90
boundary), it is seen that Eq. 4.45 is similar to the energy damping rate calculation
(Lamb 1932) and the method suggested by Mei and Liu (1973), except that Eq. 4.45 is
applicable to rotating basins. This method is efficient in calculating
) , (
1
m l
, as it does not
require knowledge about
) , (
1
~
m l
.
Taking p l or q m yields
) , )( , (
~
q p m l
b and substituting the results back into Eq. 4.41
and then into Eq. 4.38b gives the modal structure correction. Note that we have
) , )( , (
~
m l m l
b = 0 by keeping the norm (the same form as the integral in left-hand-side of Eq.
4.37a)
( )dV
m l
H
m l
) , ( ) , (
~ ~
M
(4.47)
the same with and without the 1
st
order corrections (e.g., Kalaba et al. 1981). The
convergence of the modal expansion (Eq. 4.41) is slow as this method expresses
velocities normal to the boundary by superposition of inviscid modes that themselves
have zero velocity normal at the boundary; the boundary condition is satisfied only in an
asymptotic sense, similar to the Fourier series reproducing discontinuities.
4.5 Internal wave cancelling in a flat-bottomed rectangular basin
First we illustrate, by way of example, damping by internal wave cancelling of a
vertical mode 1 basin-scale internal wave in a non-rotating rectangular basin of length L
and width W, filled with a linearly stratified fluid (i.e., N = 1). Horizontal coordinates x
and y are taken in the longitudinal and transverse directions, respectively, and the basin
length is used as the horizontal length scale. For a vertical mode 1 internal wave, C
/
0
H N , which yields B
2 2
S . To illustrate the process, sidewall boundary layers
are neglected and only longitudinal oscillations are considered.
The horizontal modes for the longitudinal oscillations and the associated angular
frequencies are
( ) x m c
l m l
cos
1
) ( ) , (
=
(4.48a)
( ) x m i u
m l
sin
) , (
=
(4.48b)
Chapter 4. Damping mechanisms of internal waves
91
m c
l m l ) ( ) , (
0
=
(4.48c)
where m is an integer other than 0 (note that the modes with +m and -m form a
conjugate pair that satisfies Eq. 4.36). The normalizing factors (Eq. 4.37a) are
h
l
KE
m l
A e
) ( ) , (
~
=
(4.49)
where A
h
= W/L is horizontal aspect ratio of the basin. From Eq. 4.46a, the velocity,
given by Eq. 4.48b, induces an Ekman normal velocity:
) , ( ) , (
0
) , (
,
m l m l m l
iwc E
i w
=
(4.50)
at the top of the bottom boundary layer, where
) , (
0
m l
bl
i c = and 0 =
bt
c are used as
the bottom boundary layer is a Stokes layer. Using Eqs. 4.48-4.50, Eq. 4.45 becomes
( )
m q
l p
V m l q p m l q p m l
m q l p
m l
f
i i b
= +
,
) , (
) , (
0
) , )( , ( ) , (
0
) , (
0 , ,
) , (
1
2
~
(4.51)
where
m q ,
= 1 only if q = +m or m and
( ) ( )
) (
) (
) (
) ( ) (
) , (
1 1
l
p
p
KE
l p
l p
V
c
c
f
=
(4.52)
In linearly stratified fluids, the vertical modes and associated celerities are
approximately given by
( ) z l
l
cos
) (
=
(4.53a)
1 ) (
= l c
l
(4.53b)
for l > 0, so 2 / 1
) (
=
l
KE
(Eq. 4.33).
Setting (p, q) = (l, m) in Eq. 4.51 gives
) , (
1
m l
that has a negative real part and
positive imaginary part of equal magnitude, indicating the bottom boundary layer
induces both retardation of the oscillation and damping. The damping is proportional to
) , (
0
m l
, so that waves with higher frequencies are damped faster, but damping per
period is smaller for such waves. For linear stratification, there is no preferential
Application of modal analysis to strongly stratified lakes
92
damping of particular vertical internal wave modes, as Eq. 4.52 gives
) , ( l l
V
f = 2 for all
the vertical modes. The homogeneous case may be recovered by setting C = (gH)
1/2
,
( ) 1 1
) 0 (
= , 1
) 0 (
=
KE
and
) 0 , 0 (
V
f
= 1; this damping rate agrees with the results by Hunt
(1952) and van Dorn (1966) in the shallow water limit, after converting their spatial
damping rates to temporal damping rates.
The dissipative structure of the fundamental mode internal wave may be calculated
by taking p l or q m to obtain
) , )( , (
~
q p m l
b and substituting the results into Eq. 4.41
(note that both +m and m modes must be included in the calculation). The bottom
Ekman normal velocity excites different vertical modes, including the surface wave
modes, but with the same horizontal structure, as the expansion coefficients
) , (
) , (
~
q p
m l
b are
non-zero for all p but only for q = m in Eq. 4.51. The 1
st
order correction to the
vertical velocity is largest at the bottom and decreases towards the surface (Fig. 4.3a).
The associated horizontal velocity is unidirectional being largest in the middle of the
water column, which decreases total (i.e., inviscid solution + 1
st
order correction)
horizontal velocity in the upper half of the water column but increases it in the lower
half (Fig. 4.3b). It also induces a phase delay to the velocity in the lower part of the
water column relative to the isopycnal displacement (Fig. 4.3d). The 1
st
order correction
to the pressure decreases the total pressure except in the lower half of the water column
away from the bottom (Fig. 4.3c).
The additional wave components, generated by the Ekman normal velocity,
destructively interact with the parent wave and extract energy from the water column.
To show this, we calculate the 1
st
order vertical energy flux,
) , (
1
~
m l
z
F , given by
( ) ( ) ( ) ( )
t m l t m l t m l t m l m l
z
m l m l m l m l
e w e p e w e p F
) , (
0
) , (
0
) , (
0
) , (
0
i ) , (
0
i ) , (
1
i ) , (
1
i ) , (
0
) , (
1
~
Re
~
Re
~
Re
~
Re
~
+ =
(4.54)
This vertical energy flux is oscillatory and downward due to the phase lag between the
pressure and vertical velocity (= 270; Fig. 4.3e) being locked to the parent wave. The
phase between the vertical velocity and pressure changes vertically (Fig. 4.3a,c), but the
vertical energy flux is net negative throughout the water column (Fig. 4.3f,g).
Chapter 4. Damping mechanisms of internal waves
93
-1 -0.5 0 0.5 1
-0.8
-0.6
-0.4
-0.2
0
=(i)
-1
z
(a)
-1 -0.5 0 0.5 1
(b) (c)
(t=0)
-0.8
-0.4
0
0.4
0.8
(d)
+(E/S)
1/2
+(E/S)
1/2
-1.5
-1.0
-0.5
0
0.5
1.0
1.5
(e)
b1
b0
zb1
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
-1.0
-0.8
-0.6
-0.4
-0.2
0
(2)
-1
t
(f)
-0.4 -0.2 0
(g)
-1.0
-1 -0.5 0 0.5 1
(t=0)
(t=T/4)
(t=T/4)
, , u
0
~
0
~
p w
0
~
, , u
0
~
0
~
p w
0
~
, , u
1
~
1
~
p w
1
~
, , u
1
~
1
~
p w
1
~
u
~
~
p w
~ ~
,
~
u ~
,
,
w ~
~ p
F
~
z
z
,
z
1
/
1
0
F
~
T
z1
dt
T
0
1
F
~
~
p
w
~
F
~
u
0
~
u
0
~
u
1
~
~
0
~
0
~
1
Fig. 4.3. Internal wave cancelling of the fundamental mode internal wave in a linearly stratified
rectangular basin with N = 1 and
2 2
S B =
. (a)-(c) Vertical profiles of vertical velocity w, horizontal
velocity u, and pressure p, respectively, (d) time series of isopycnal displacements
( ) w i
~ ~
1
=
and
horizontal velocities u
~
induced by inviscid and dissipative modes at z = -0.75 with (E/S)
1/2
= 0.1, (e)
time series of 1
st
order vertical velocity, 0
th
order pressure, and 1
st
order vertical energy flux at z = -
1, (f) staggered plot of vertical energy flux in time and depth, and (g) temporally averaged vertical
energy flux. All variables at x = 0.25 are plotted.
4.6 Damping of internal waves in circular basins
Rotating basin-scale internal waves in a circular basin are damped both by internal
wave cancelling and modified spin-down. We consider a linearly stratified fluid in a
flat-bottomed circular basin with the radius R. Cylindrical coordinates (r, , z) are more
appropriate for this geometry and velocity components (u, v) are taken as the radial and
Application of modal analysis to strongly stratified lakes
94
azimuthal components. The celerity scale and stratification are taken as in the previous
example.
The fundamental mode Kelvin and Poincar waves are primarily used to illustrate
the damping process and its effect on the frequencies and spatial structures of the
modes. These have distinct characteristics: Kelvin waves are cyclonic waves that induce
strong currents near the lateral boundary, whereas super-inertial anticyclonic Poincar
waves are associated with strong currents in the middle of the basin (Csanady 1967;
Antenucci and Imberger 2001; Stocker and Imberger 2003). We follow Shimizu et al.
(2007) and use the term Kelvin wave for cyclonic waves that have super-inertial
frequencies because the frequency and structure changes continuously across the inertial
frequency (Antenucci and Imberger 2001).
In a circular basin, all the horizontal modes, including those of basin-scale waves and
geostrophic modes (Proudman 1929), need to be included in any modal expansion as in
Eq. 4.41; the complete set of the modes are given in Appendix 4.B. As the horizontal
modes have radial and azimuthal modes, we rewrite (l, m) and (p, q) as (l, m, n) and (p,
q, n) in Eqs. 4.45 and 4.46, where m and q are radial modal indices and the common
azimuthal modal index n is used below, as integrals in Eq. 4.45 with different azimuthal
modal indices always vanish due to the orthogonality.
We rather arbitrarily split
) , , (
1
n m l
and
) , , )( , , (
~
n q p n m l
b (hence
) , , (
1
'
~ n m l
p ,
) , , (
1
~ n m l
u , and
) , , (
1
~ n m l
v ) such that
) , , (
, 1
) , , (
, 1
) , , (
, 1
) , , (
1
n m l
sw
n m l
sp
n m l
iwc
n m l
+ + =
(4.55a)
) , , )( , , ( ) , , )( , , ( ) , , )( , , ( ) , , )( , , (
~ ~ ~ ~
n q p n m l
sw
n q p n m l
sp
n q p n m l
iwc
n q p n m l
b b b b + + =
(4.55b)
where the first to third terms on the right-hand-side are the 1
st
order corrections due to
) , , (
,
n m l
iwc E
w
,
) , , (
,
n m l
sp E
w
, and
) , , (
,
n m l
sw E
u
in Eq. 4.46, respectively. Complete expressions for
) , , (
1
n m l
and
) , , )( , , (
~
n q p n m l
b are rather lengthy and are given in Appendix 4.C. Before discussing
more general cases, we first consider the fundamental Kelvin wave mode (m = +1) in
the high- and low-frequency limits.
In the high-frequency limit (i.e., S
-1
<<
) 1 , 1 , 1 (
0
+
), the fundamental Kelvin and
Poincar wave modes reduce to non-rotating standing internal waves (Antenucci and
Chapter 4. Damping mechanisms of internal waves
95
Imberger 2001), and both the bottom and sidewall boundary layers become Stokes
layers (therefore,
) 1 , 1 , 1 (
0
+
= = i c c
sw bl
and 0 =
bt
c ). The bottom boundary layer
damps the wave by the internal wave cancelling in the same way as in rectangular
basins. Damping due to sidewall boundary layer also occurs in the same way except that
the boundary-generated additional waves propagate horizontally and reflect from the
sidewalls, forming a standing wave pattern horizontally. The damping rate is obtained
by taking the limit S
-1
<<
) 1 , 1 , 1 (
0
+
in Eq. 4.C1a,c in Appendix 4.C:
( )
+ =
1
1
2
1
2
) 1 , 1 , 1 (
0
) 1 , 1 ( ) 1 , 1 , 1 (
0
) 1 , 1 , 1 (
1
A f i i
V
(4.56)
The first and second terms are the contributions from internal wave cancelling due to
bottom and sidewall boundary layer, respectively. The first term has the same form as in
rectangular basins (see Eq. 4.51), and the second term is negligible for shallow waters
limit as A << 1. The result for a homogeneous water body may be recovered by setting
C = (gH)
1/2
, l = 0 and
) 0 , 0 (
V
f = 1 in Eq. 4.56 and this agrees with the results previous
obtained by Case and Parkinson (1957) and Mei and Liu (1973).
In the low-frequency limit (i.e.,
) 1 , 1 , 1 (
0
+
<< S
-1
provided that Eq. 4.19 is satisfied),
the bottom boundary layer becomes an Ekman layer (Fig. 4.1) and the damping is the
result of a process similar to spin-down (Fig. 4.4). A positive azimuthal velocity, under
the Kelvin wave crest, induces a negative radial Ekman transport (Fig. 4.4b,d) towards
the centre of the basin. The negative gradient of the Ekman transport causes an upward
Ekman normal velocity at the bottom plus the corner sink sucking the interior fluid into
the bottom boundary layer (Fig. 4.4e). As in the spin-down problem for steady
circulation, the Ekman normal velocity induces a horizontal circular flow through
extension and compression of the water column (Fig. 4.4c); however, the maximum
displacement is shifted by 90 compared to the Ekman normal velocity. As a result, the
additional circular flow does not cancel the parent wave as in the spin-down, but it
slants the crest and trough backwards near the wall as in low-frequency frictional
Kelvin waves along a straight wall (Mofjeld 1980; Martinsen and Weber 1981; Davey
et al. 1983) (Fig. 4.4a-c). The downward sink flow is driven by a positive pressure,
leading to a net downward radially averaged energy flux throughout the water column
(Fig. 4.4f,g). This is a significant difference from the stratified spin-down of steady
Application of modal analysis to strongly stratified lakes
96
circulation, where diffusion is required to damp the flow in the middle of the water
column (Benton and Clark 1974; Duck and Foster 2001). It is also interesting to note
that the sinks and sources at the corner are responsible for draining the energy from the
interior at z = -1; this drained energy is transported towards the centre of the basin
where part of it is returned back into the interior and the rest dissipated within the
boundary layer. Although the process is not exactly the same as the spin-down of steady
circulation, we use the term spin-down for the process described above in this paper.
The damping rate in the low-frequency limit is obtained by taking the limit
) 1 , 1 , 1 (
0
+
<< S
-1
in Eqs. 4.C1b,c:
S
A i i
S
if
V
) 1 , 1 , 1 (
0
) 1 , 1 ( ) 1 , 1 , 1 (
1
2
1
+
+
=
(4.57)
noting that 2 / S c c
bt bl
= = in the low-frequency limit. The first and second terms are
contributions from the spin-down and internal wave cancelling due to sidewall
boundary layer, respectively. The spin-down induces damping, but do not modify the
angular frequency. Neglecting the factor
) 1 , 1 (
V
f , it induces damping proportional to the
spin-down rate, which is
2
fH in a dimensional form. The damping rate due to the
sidewall Ekman velocity becomes large as
) 1 , 1 , 1 (
0
+
(hence S) decreases; however it is
important to note that the above equation should be applied only under the condition Eq.
4.19, otherwise the structure of the sidewall boundary layer deviates from the Stokes
layer as discussed in Section 4.3.2.
Chapter 4. Damping mechanisms of internal waves
97
(a)
d
(b)
e
(c)
-0.3
-0.2
-0.1
0
0.1
E
r
0
(d)
0.7 0.8 0.9 1
-1.0
-0.8
-0.6
-0.4
-0.2
0
r
z
,
/
5
0
,
z
1
/
1
0
(e)
0.7 0.8 0.9 1
r
(f)
-0.06 -0.03 0
(g)
-0.3 0 0.3
, +(E/S)
1/2
-0.4 0 0.4
, +(E/S)
1/2
1.0
4.0
v
0
~r
v
0
~r
v
1
~r
v
1
~r
~
0
~
0
~
1
~
1
R T
z1
dtdr F
RT
0 0
~ 1
w
1
~
F
~
q ~
Fig. 4.4. Spin-down of the fundamental internal Kelvin wave mode with S = 0.1 in a linearly
stratified basin with N = 1 and
2 2
S B =
. (a) Plane view of the dissipative modal structure when
(E/S)
1/2
= 0.05, (b) inviscid modal structure, (c) the 1
st
order correction to the modal structure, (d)
radial Ekman transport along solid line in panel (b), (e) staggered plot of 1
st
order vertical velocity
along vertical cross-section shown in panel (c) by solid line, (f) staggered plot of the temporally
averaged 1
st
order vertical energy flux, and (g) temporally and radially averaged vertical energy
flux. Shading and vector in panels (a)-(c) show the isopycnal displacements
( )
) 1 , 1 , 1 (
1
) 1 , 1 , 1 (
0
) 1 , 1 , 1 ( ~ ~ + +
+ + + +
= w i
and horizontal velocities (
) 1 , 1 , 1 ( ~ + +
u
,
) 1 , 1 , 1 ( ~ + +
v
) at z = -0.75, respectively.
Sidewall boundary layer is neglected to illustrate the spin-down process. Vertical modes are
computed numerically using 20 vertical grid points. First 200 wave modes (including + and -
modes) and 100 geostrophic modes are summed for plotting purposes.
The above simple limiting cases illustrate that damping of internal waves is due to a
combination of the internal wave cancelling and a modified spin-down. Interestingly,
the two processes counteract for Kelvin waves. Sub-inertial Kelvin waves are damped
by the spin-down, whereas the internal wave cancelling tends to excite the waves (Fig.
4.5e). The roles of the two processes sharply change near S = 0.7, when the frequency
crosses the inertial frequency (Fig. 4.5a,e). This is related to the reversal of the radial
Application of modal analysis to strongly stratified lakes
98
Ekman transport at the inertial frequency (Fig. 4.2); both the bottom Ekman normal
velocity and the corner-source-induced flows change direction and so does the vertical
energy flux. For Poincar waves, both mechanisms lead to wave damping, but unlike
Kelvin waves, the damping rates approaches zero in the low-frequency limit (Fig. 4.5f),
as negligibly small vertical displacements (hence pressure) in the limit (Antenucci and
Imberger 2001) does not drive significant boundary layer flows. Overall, the damping
rate due to the bottom boundary layer is proportional to the corresponding angular
frequencies for S > 0.5, but the damping rates deviate below S ~ 0.5 for sub- and super-
inertial waves (Fig. 4.5c). Bottom Ekman normal velocity also retards both types of
waves (Fig. 4.5b; note that
) , , (
0
n m l
is negative for Poincar waves). When the Burger
number is small, the sidewall boundary layer selectively damps radial mode 1 cyclonic
waves (Fig. 4.5d), as they induce strong currents near the sidewall (see Fig. 4.4b).
The internal wave cancelling and spin-down also modify the modal structure in
different ways (Fig. 4.6). The modification caused by internal wave cancelling due to
bottom boundary layer is negligible when the Burger number is small, but becomes
dominant for super-inertial waves (third column in Fig. 4.6). For super-inertial waves, it
induces isopycnal displacements and velocities with a phase lag of 270 and 90
compared to the parent wave, respectively, in the lower part of the water column (Fig.
4.6s,x). This results in an intensification of the flow that delays the isopycnal
displacements (Fig. 4.6q,v), similar to internal waves in non-rotating rectangular basins
(Fig. 4.3d).
Unlike the internal wave cancelling, spin-down induces a velocity normal to the
sidewall (fourth column in Fig. 4.6), and the interior fluid enters the bottom corner at r
= 1 (see Fig. 4.4e). The flow has swirl with a 180 phase lag when the Burger number is
small (Fig. 4.6d), but the flow becomes more unidirectional and the phase lag
approaches 270 as the wave frequency increases to the inertial frequency (Fig. 4.6i).
These modification tends to slant the crest and trough near the wall backwards (Fig.
4.4a and Fig. 4.6a,f), and the currents tend to be delayed relative to the isopycnal
displacements. For super-inertial waves, the spin-down induces a structure that has a
relatively large amplitude and length scale smaller than the parent waves both in the
horizontal and vertical (Fig. 4.6n,t). This occurs because the temporally oscillating sinks
and sources at the bottom corner may radiate internal wave rays at super-inertial
Chapter 4. Damping mechanisms of internal waves
99
frequency (Lighthill 1978; Gill 1982). As we sought oscillatory solutions with a fixed
angular frequency, the rays must have a distinct angle and form a standing wave
pattern. Intensity of the corner sources and sinks decreases as the Burger number
increases, and the fine structure eventually disappears (Fig. 4.6v,y).
0
1
2
3
4
5
S
|
|
(a)
R1A1 C
R1A1 A
R2A1 C
R1A2 C
-0.50
-0.25
0
0.25
0.50
(
|
|
f
V
)
-
1
R
e
(
)
(b)
0
0.5
1.0
1.5
2.0
(
|
)
-
1
I
m
(
1
)
(c)
R1A1 C
R1A1 A
R2A1 C
R1A2 C
0
10
20
30
(
|
|
A
)
-
1
[
I
m
(
)
,
R
e
(
)
] (d)
0 0.25 0.5 0.75 1
-4
-2
0
2
4
S
(
|
|
)
-
1
I
m
(
) (e)
Internal wave cancelling
Spin-down
0 0.25 0.5 0.75 1
0
0.25
0.50
(
|
|
)
-
1
I
m
(
)
S
(f)
0
f
V
f
V
f
V
|
Fig. 4.5. Frequency corrections and damping rates of basin-scale internal waves. (a) Dispersion
relationships of basin-scale internal waves, (b)-(c) the 1
st
order correction to the angular frequencies
and damping rates due to bottom boundary layer, respectively, (d) those due to sidewall boundary
layer, (e)-(f) the damping rates of fundamental Kelvin wave mode (R1A1 C) and Poincar wave
mode (R1A1 A) due to internal wave cancelling and spin-down, respectively. In panel (d), dash-dot
line almost coincides with solid line, and dashed and dotted lines with abscissa. Note that damping
rates in panels (c) remain finite as S 0, although they appear very large due to non-normalization
by
) , , (
0
n m l
. Abbreviations are R#: radial mode #, A#: Azimuthal mode #, C: cyclonic, and A:
anticyclonic.
) , , (
1
n m l
is divided by
) , ( l l
V
f
panels (b, c, e, f) and by A in panel (d) for plotting purposes.
Application of modal analysis to strongly stratified lakes
100
(a) (b) (c) (d) (e)
(f) (g) (h) (i) (j)
(k) (l) (m) (n) ( 1/5) (p)
(q) (r) (s) (t) ( 1/2) (u)
K
e
l
v
in
S
=
0
.
3
Dissipative
(E/S)
1/2
= 0.05
Inviscid Bottom
(Wave cancelling)
Bottom
(Spin-down)
Sidewall
K
e
l
v
in
S
=
0
.
6
K
e
l
v
in
S
=
0
.
8
P
o
i
n
c
a
r
e
S
=
0
.
8
P
o
i
n
c
a
r
e
S
=
1
0
(v) (w) (x) (y) (z)
-0.3 0 0.3
+(E/S)
1/2
,
-0.6 0 0.6
,
-0.05 0 0.05
/A
1.5
+(E/S)
1/2
,
4
,
1
/A
(Wave cancelling)
~
0
~
1
~
0
~
1,sp
~
1,sw
v
1,sw
~r
v
1,sp
~r
v
0
~r
v
1
~r
v
0
~r
~
1,iwc
v
1,iwc
~r
Fig. 4.6. Dissipative modal structure of Kelvin waves with S = 0.3 (first row), S = 0.6 (second row), S
= 0.8 (third row), and Poincar waves with S = 0.8 (fourth row) and S = 10 (fifth row) in linearly
stratified basin with N = 1 and
2 2
S B =
. Shading and vector show isopycnal displacements and
horizontal velocities at z = -0.75, respectively. The first column shows the dissipative modal
structure when (E/S)
1/2
= 0.05, and the second shows the inviscid modal structure. The third to fifth
columns correspond to first order corrections by the internal wave cancelling due to bottom
boundary layer, spin-down, and internal wave cancelling due to sidewall boundary layer,
respectively. The variables are divided by A in the fifth column, and by 5 and 2 in panels (n) and (t),
respectively, for plotting purposes. See caption of Fig. 4.4 for number of modes used for plotting.
The sidewall part induces a purely radial velocity, which does not vanish at the
boundary as the interior fluid enters the sidewall boundary layer (fifth column in Fig.
4.6). The velocity phase lag is 270 relative to the leading wave for the Stokes sidewall
Chapter 4. Damping mechanisms of internal waves
101
boundary layer. The correction due to sidewall Ekman normal velocity is small for
basins with small aspect ratios.
4.7 Discussion
The results presented in this paper have several limitations. First, the sidewall
boundary layer solution is valid only when Eq. 4.19 is satisfied. By introducing a
shallow basin, it is also assumed that O(A
2
) << S
-2
B = O(1) in the equation of vertical
motion (Eq. 4.18e). These conditions are not satisfied in deep basins and homogeneous
basins, and the sidewall boundary layer solution needs to be modified in such cases.
Second, the 1
st
order correction to the internal wave field has a relatively large
amplitude with smaller horizontal and vertical scales when the frequency is close to, but
above, the inertial frequency. The scaling applied in the theory breaks down if the
amplitude becomes so large and/or the structure becomes so fine that the nonlinear
terms and/or viscosity in the interior are no longer negligible. Third, the results are not
applicable when wave frequencies are very close to the inertial frequency (or
1
S in
Eqs. 4.14-4.17), as the thickness of one component of the bottom boundary layer
becomes infinitely large (see Eq. 4.14 and Fig. 4.1). In such case, the inviscid solution
should not be assumed as the 0
th
order solution.
An important feature of the method used in this paper is that a problem is separated
into boundary layer flow, where viscosity enter the force balance, and the flow in the
basins interior, where viscous effects may be neglected, by introducing different length
scales characteristic to each problem; the boundary layer flow affects the interior only
through the Ekman normal velocity. Strictly speaking, the same method is not
applicable to real lakes, as the thickness of the bottom boundary layer is not determined
by the balance between viscous force and unsteady inertia but by bottom-generated
turbulence entraining the stratified fluid from the lakes interior over the stratified
period (e.g., Lemckert et al. 2004). However, the problems are similar in a sense that
viscosity plays a dominant role only in the boundary layer; turbulent flow in the well-
mixed bottom boundary layer is separated from the nearly laminar interior flow by
stratification suppressing turbulence at the top of the boundary layer. Therefore, we may
still treat flows in lakes in the same way, considering turbulent boundary layer flow and
the nearly invisid interior flow communicating through Ekman normal velocity.
Application of modal analysis to strongly stratified lakes
102
Considering the above, the third limitation mentioned earlier becomes irrelevant to
real lakes. The well-mixed boundary layer implies that the pressure within the boundary
layer is constant across the layer so Eq. 4.11 still holds. As viscosity above the
boundary layer may be neglected, a free stress condition is more appropriate for the
boundary condition at the top of the boundary layer:
0 =
z
v
z
u
E E
at Z =
( )
BBL
h S E
2 / 1
/
(4.58)
where h
BBL
is the thickness of the mixed boundary layer in non-stretched coordinate.
Assuming constant turbulent viscosity, the solution to Eq. 4.11 has the form as Eq. 4.14
but the factor ( ) Z
exp needs to be replaced by
( ) ( ) ( ) ( ) ( )
BBL BBL
h S E z h S E
2 / 1 2 / 1
/ cosh / / cosh
(4.59)
and
bl
c and
bt
c (Eq. 4.16) may be obtained by replacing
by
( ) ( )
BBL
h S E
2 / 1
/ tanh
(4.60)
Using the new definitions of
bl
c and
bt
c , other equations apply. Although these changes
are required, this does not modify the magnitude of the Ekman normal velocity
significantly as far as the thickness of the thinner component of the boundary layer is
thin compared to the mixed bottom boundary layer thickness.
The above discussion allows us to compare prediction of the theoretical results with
the damping rates of basin-scale internal waves in Lake Kinneret (Shimizu and
Imberger In press), which motivated this theoretical investigation. Lake Kinneret is a
monomictic lake located in northern Israel with the length, width, and average depth of
20 km, 10 km and 30 m, respectively (Fig. 4.7a). The lake is strongly stratified in
summer with the thermocline located between 15 and 20 m deep, which separates the
warm (~28C) epilimnion from the cool (~16C) hypolimnion (Serruya 1975). The
inertial frequency is 7.8 10
-5
rad s
-1
and typical Burger number in summer is 0.6
(Antenucci and Imberger 2001). Direct turbulence measurements in the lake showed
that the diffusivity of mass near the bottom is 10
-5
~ 10
-4
m
2
s
-1
(Yeates and Imberger
2004).
Chapter 4. Damping mechanisms of internal waves
103
0 2 4 6 8 10 12 14
0
2
4
6
8
10
12
14
16
18
20
22
T4
(a)
0 m
10 m
20 m
30 m
Easting (km)
N
o
r
t
h
i
n
g
(
k
m
)
996 997 998 999
30
25
20
15
10
5
0
D
e
p
t
h
(
m
)
Density (kg m
-3
)
(b)
0 0.005 0.010 0.015
Buoyancy frequency (Hz)
N
-3.0 -1.5 0 1.5 3.0
(-)
(c)
(l)
(3)
(2)
(1)
Fig. 4.7. Lake Kinneret. (a) Bathymetry, (b) typical stratification at T4 and associated buoyancy
frequency in summer, and (c) vertical modes under stratification in panel (b). In panel (a), the
origin of the figure is situated at 32.70N, 35.51E, and contour lines are drawn every 5 m.
Assuming turbulent viscosity within the bottom boundary layer of 10
-4
m
2
s
-1
yields E
= 1.4 10
-3
.
Numerical solution of Eqs. 4.31 and 4.32 under typical stratification in
summer (Fig. 4.7b) gives the vertical modes (Fig. 4.7c), leading to
) 1 , 1 (
V
f = 1.5 from Eq.
4.52. Using Fig. 4.5c, these values yield damping rates of 2.0 and 4.4 10
-6
rad s
-1
for
the vertical mode 1 horizontal mode 1 Kelvin and Poincar waves, whose typical
frequencies in summer are 7.9 and 17.4 10
-5
rad s
-1
, respectively (Shimizu and
Imberger In press). The corresponding estimates from field data are 6.7 and 12 10
-6
rad s
-1
, respectively; the predicted damping rates are about 1/3 of the estimates from
field data. The result is encouraging considering that simplified geometry is used in the
theory. The disagreement is probably due to effects of sloping bottom that intensifies
currents in shallow parts and modifies the boundary layer dynamics (Thorpe 1987).
Further investigation on effects of sloping bottom is required to obtain further
understandings of damping of internal waves in real lakes.
4.8 Conclusions
We have investigated damping rates and the dissipative modal structure of basin-
scale internal waves in continuously stratified rotating circular basins. The solutions are
obtained for the parameter ranges, (E/S) << 1, A<<1, EA
2
<< S
3
, and B = O(S
2
) using a
Application of modal analysis to strongly stratified lakes
104
perturbation analysis by incorporating the Ekman normal velocities as boundary
conditions. The basin-scale internal waves are damped by a combination of internal
wave cancelling and spin-down, which tend to counteract each other for Kelvin waves
but reinforce each other for Poincar waves. In the high- and low-frequency limits The
Ekman normal velocities modify the modal structure as expected from previous studies,
but when the wave frequency is close to, but above, the inertial frequency, internal wave
rays emitted from temporally oscillating sinks and sources at the bottom corner add
finer structure with relatively large amplitude. The damping rates predicted by the
theory showed reasonably good agreement with those estimated from field data in a
strongly stratified lake.
Appendix 4.A -- Orthogonality of modes in a continuously stratified rotating basin
with arbitrary shape
Orthogonality of modes in a rotating homogeneous basin was shown by Proudman
(1929) and Platzman (1972), which was extended to a layer-stratified basin by Shimizu
et al. (2007). Here, we apply a similar approach to a continuously stratified rotating
basin with arbitrary shape.
Consider a continuously stratified basin with the horizontal boundary at z = 0 located
at ( ) ( )
l l
y x y x , , = and with the bottom at ( ) y x z z
b
, = , where z is upward positive
coordinate with origin at the equilibrium surface. Surface boundary condition is given
by Eq. 4.27. Assuming influx of fluids at the bottom of q
b
per unit plane area (e.g., due
to the bottom Ekman normal velocity), the bottom boundary condition may be written
as
b
b
b
b
b
b
q
y
z
v
x
z
u
z
p
BN
S
i =
\
|
'
2
2
at
b
z z =
(4.A1)
where vertical velocity w has been related to p using Eq. 4.25 and the subscript b
denotes a value evaluated at the bottom. If some parts of the lateral boundary are
vertical, we also assume influx of q
l
per unit height and unit length parallel to the
boundary. Then, the lateral boundary condition is
l y x
q vn un = +
at
( ) ( )
l l
y x y x , , =
(4.A2)
Chapter 4. Damping mechanisms of internal waves
105
Let us add Eq. 4.A1 multiplied by ( )
b
z z to Eq. 4.26, and write the resulting equation
and Eqs. 4.9c,d in a matrix form as:
b
f K M + =
(4.A3)
were
( )
|
|
|
|
|
|
|
|
|
\
|
|
|
\
|
\
|
+
=
1 0 0
0 1 0
0 0
2
2
z BN
S
z z
z
b
M
(4.A4a)
( )
(
(
(
(
(
(
(
|
|
|
|
|
|
|
\
|
+
|
|
|
|
|
|
|
\
|
=
0
1
1
0
0
0 0 0
0 0 0
0
S y
S x
y x
z z
y
z
x
z
i
b
b b
K
(4.A4b)
( )
|
|
|
\
|
=
0
0
b b
z z q
i
b
f
(4.A4c)
are generalized version of M, K, and f
b
given by Eq. 4.29.
The matrix operators M and K in Eq. 4.A3 are Hermitian (or self-adjoint), which can
be shown as follows. First, multiply the left-hand-side of Eq. 4.A3 by the conjugate
transpose of pressure and horizontal velocities, ( )
* * * *
, , '
v u p = ( is used to indicate
a vector different from ), from the left, and integrate the expression over the basin
using integration by parts. Neglecting the factor , using Eq. 4.25 to relate p to w,
introducing vertical displacement ( ) w i
1
= , and applying surface boundary condition
Eq. 4.27, the integral may be written as
Application of modal analysis to strongly stratified lakes
106
( )
( )
( )
( )dxdy c dxdydz v v u u
S
BN
dxdydz
b
b
z
z
H
+
|
|
\
|
+ + =
*
2
) 0 (
0
* * *
2
2
0
x
x
M
(4.A5)
where the superscript H stands for the conjugate transpose and integral in terms of x and
y are taken over the basin. Using the above relation, it can be shown that
( )
( )
( ) [ ]
( )
dxdydz dxdydz
b b
z
H
z
H
=
0 0
x x
M M
(4.A6)
which means that the matrix operator on the left-hand-side of Eq. 4.A3 is Hermitian.
Second, multiply the first term on the right-hand-side of Eq. 4.A3 by conjugate
transpose of
from the left and integrate over the basin using integration by parts,
yielding
( )
( )
( ) ( )
( ) ( )
( )
( )
( )
+
(
(
|
|
\
|
+ +
+
(
+ +
+ =
0
* *
* * * *
0
* * * *
* * * *
0
1
'
' '
' ' ' '
' ' ' '
x
x
x
K
b
b
b
z
z
b
b b b b
b
b b b b
z
H
dxdydz u v v u
S y
v
x
u
p v
y
p
u
x
p
i
dxdydz v p v p
y
u p u p
x
i
dxdy
y
z
v p v p
x
z
u p u p i
dxdydz
(4.A7)
Further, the second term on the right-hand-side can be written as
( ) ( )
( )
( ) ( ) [ ]
( )
( ) ( )
(
+ +
+ +
+ + + =
(
+ +
dxdy
y
z
v p v p
x
z
u p u p i
dl dz n v p v p n u p u p i
dxdydz v p v p
y
u p u p
x
i
b
b b b b
b
b b b b
z
y x
z
b
b
* * * *
0
* * * *
0
* * * *
' ' ' '
' ' ' '
' ' ' '
x
x
(4.A8)
Chapter 4. Damping mechanisms of internal waves
107
where dl is the length element along the lateral boundary, and the integral in the first
term on the right-hand-side is taken along the basins perimeter. Using the above
relationship and Eq. 4.A2, Eq. 4.A7 becomes
( )
( )
( )
( )
( ) [ ]
( )
dxdydz dl dz q p q p i
dxdydz
b b
b
z
H
z
l l
z
H
+ + =
0 0
* *
0
' '
x x
x
K
K
(4.A9)
The above equation shows that the matrix operator on the right-hand-side of Eq. 4.A3 is
also Hermitian if q
l
= 0, satisfying
( )
( )
( ) [ ]
( )
dxdydz dxdydz
b b
z
H
z
H
=
0 0
x x
K K
(4.A10)
As both the matrix operators in Eq. 4.A3 are Hermitian, the homogeneous solutions
of Eq. 4.A3 under the conditions, q
l
= q
b
= 0 (hence f
b
= O), are orthogonal and form a
complete set of normal modes. The orthogonality relationships can be derived by i)
multiplying Eq. 4.A3 for r
th
mode by complex conjugate of modal structure of s
th
mode,
)* (
~
s
, and integrating over the basin, ii) multiplying Eq. 4.A3 for s
th
mode by complex
conjugate of
) (
~
r
and integrating over the basin, iii) subtracting complex conjugate of
the latter equation from the former, and iv) using Eqs. 4.A6 and 4.A10 (single modal
index is used here, as the modes in basins with arbitrary geometry are not separable into
different horizontal or vertical modal components). The result gives the orthogonal
relationships:
( )
( )
s r
r
z
r
H
s
e dxdydz
b
,
) (
0
) ( ) ( ~
=
x
M
(4.A11a)
( )
( )
s r
r r
z
r
H
s
e dxdydz
b
,
) ( ) (
0
) ( ) ( ~
=
x
K
(4.A11b)
Using Eq. 4.A5, it can be seen that
) ( ~ r
e is twice the total energy contained in the mode.
The equation Eq. 4.37 correspond to the case with 1 =
b
z .
Application of modal analysis to strongly stratified lakes
108
Once orthogonality of modes (Eq. 4.A11) are shown, completeness of the modal
expansion (Eq. 4.41) can be shown by following the standard procedure (see e.g.,
Arfken and Weber 1995).
Appendix 4.B -- Horizontal modes in a flat-bottomed circular basin
The oscillatory solutions to Eq. 4.34 may be written as (Csanady 1967; Antenucci
and Imberger 2001):
( )
( )
in n m l w
n m l
n m l w
n m l
n m l
l
n m l w
n m l w
in n m l w l n m l w
e G
iS
r
n
G
r S
i
S
c
r
v
u
e G c r
|
|
\
|
+
|
|
\
|
=
|
|
\
|
=
) , , (
) , , (
0
1
) , , (
1
) , , (
0
2
2
) , , (
0
) (
) , , (
) , , (
) , , (
1
) ( ) , , (
,
,
(4.B1)
where w in the superscript indicates wave modes and ( ) r G
n m l w ) , , (
is the normalized
radial function defined as
( )
( )
( )
) , , (
) , , (
) , , (
n m l
n
n m l
n
n m l w
J
r J
r G
=
(4.B2)
In the above equations, J
n
is the Bessel function of the first kind and
( )
2
2
) , , (
0
1
) ( ) , , (
= S c
n m l l n m l
(4.B3)
is the radial wave number (normalized by R). We use J
n
throughout and let the argument
be imaginary for sub-inertial waves following Stocker and Imberger (2003); for sub-
inertial waves, J
n
becomes the modified Bessel function of the first kind I
n
by the rule
( ) ( ) x I i ix J
n
n
n
= , where x is a real variable. The natural angular frequency
) , , (
0
n m l
is
determined from the lateral boundary condition (Csanady 1967; Antenucci and Imberger
2001):
0
) , , ( 1 ) , , ( ) , , (
0
=
n m l w - n m l w n m l
G
r
n
S G
r
at r = R (4.B4)
This gives infinite number of natural angular frequencies of different radial mode m (
0) for given l and n. (Note that if n > 0,
) , , (
0
n m l
> 0 for cyclonic waves and
) , , (
0
n m l
< 0
for anticyclonic waves, whereas if n < 0, the sign of
) , , (
0
n m l
is opposite, guaranteeing
that both + n and -n modes rotate in the same direction. Also note that +n and n modes
form the conjugate pair that satisfies Eq. 4.36). We prefer to use +m and -m for cyclonic
Chapter 4. Damping mechanisms of internal waves
109
and anticyclonic waves, respectively, so that (m, n) = (+1, 1) corresponds to the
fundamental Kelvin wave mode and (m, n) = (-1, 1) corresponds to the fundamental
Poincar wave mode. The normalization factor in Eq. 4.37a corresponding to the choice
of the radial function (Eq. 4.B2) is
2
2
) , , (
0
2 1
1
) , , (
0
2
) , , (
0
2
) (
2
) ( ) ( ) , , (
2
~
=
S
n S n c
c e
n m l
n m l n m l l
l l
KE
n m l w
(4.B5)
Although less attention has been paid, Eq. 4.34 also has steady solutions, which are
necessary for completeness of the modal expansion (Eq. 4.41). As seen from Eq. 4.34,
any form of
) , , ( n m l
can be a solution when
) 0 (
) , , ( n m l
= 0 (i.e., degenerate). One of the
natural choices is the Bessel functions (Proudman 1929), and the solutions based on this
choice may be written as
( )
( )
in n m l g n m l g
n m n m l g
n m l g
in n m l g
l n m
n m l g
e G
i
r
n
G
r
r
v
u
e G
c
S
r
)
`
|
|
\
|
+
|
|
\
|
=
|
|
\
|
=
) , , ( ) , , (
) , ( ) , , (
) , , (
) , , (
2
) ( ) , (
1
) , , (
0 1
0
1
,
,
(4.B6)
where
) , ( n m
are the roots of the Bessel function J
n
and g in the superscript indicates
geostrophic modes. The radial function may be normalized as
( )
( )
( )
) , (
) , (
) , , (
n m
n
n m
n
n m l g
J
r J
r G
=
for n = 0 (4.B7a)
( )
( )
( )
) , (
1
) , (
) , , (
n m
n
n m
n
n m l g
J
r J
r G
=
for n 0 (4.B7b)
For n 0,
) , ( n m
is determined from zero normal velocity condition at the lateral
boundary:
0
) , , (
=
n m l g
G
r
n
at r = R (4.B8)
whereas for n = 0, the above condition is automatically satisfied, but
) , ( n m
may be
determined from the conservation of mass:
( ) 0 2
0
) 0 , , (
=
R
m l g
rdr r G
(4.B9)
Application of modal analysis to strongly stratified lakes
110
(Note that modal index m for geostrophic modes is always positive in this choice.) The
normalization factor
) , , ( ~ n m l g
e corresponding to the choice of radial function (Eq. 4.B7) is
( ) [ ]
2
) , ( ) ( ) ( ) , , (
1
~
+ =
n m l l
KE
n m l g
Sc e
(4.B10)
As the geostrophic modes are steady, it is natural to make
) , , ( n m l g
,
) , , ( n m l g
u
, and
) , , ( n m l g
v
real by converting the factor
in
e
in Eq. 4.B6 into cosine and sine. In this
choice, n is always positive and +m and m may be used for modes with cosine and
sine, respectively. The conjugate pair (Eq. 4.36) does not appear for steady modes in
this choice as explained in the text. We merely use the form in Eq. 4.B6 to simplify
mathematical manipulations.
If the total mass of the basin changes, additional mode that represents spatially
uniform change of
) , , ( n m l
is required; however, they are irrelevant for our case.
Appendix 4.C -- Horizontal modes in a flat-bottomed circular basin
) , , (
1
n m l
and
) , , )( , , (
~
r q p n m l
b are determined by rewriting (l, m) and (p, q) as (l, m, n) and
(p, q, r) in Eq. 4.45, respectively, substituting Eqs. 4.B1 and 4.B6 into the equation, and
performing the integrations. Separating
) 1 (
) , , ( n m l
as in Eq. 4.55a, the angular frequencies
are given by:
( )
(
=
2
2
) , , (
0
) , , (
) , , ( ) , (
) , , (
0
) , , (
, 1
2
1
n
f
f f
n m l
n m l w
E
n m l
iwc
l l
V
n m l
n m l
iwc
(4.C1a)
( )
(
(
2
2
) , , (
0
) , , (
0
1
) , , (
) , , ( ) , (
) , , (
0
) , , (
, 1
2
1
n
S
n
f
f f
i
n m l
n m l n m l w
E
n m l
sp
l l
V
n m l
n m l
sp
(4.C1b)
[ ]
2
) , , (
) , (
) , , (
0
) , , (
, 1
n
f
f
A
n m l w
E
l l
V
n m l
n m l
sw
=
(4.C1c)
where
V
l l
f
) , (
is defined by Eq. 4.52 and
2
2
) , , (
0
1 ) , , (
0
) , , (
+
=
S
c S c i
f
n m l
bt bl
n m l
n m l
iwc
(4.C2a)
Chapter 4. Damping mechanisms of internal waves
111
2
2
) , , (
0
) , , (
0
1
) , , (
=
S
c i c S
f
n m l
bt
n m l
bl
n m l
sp
(4.C2b)
) , , (
0
) , , (
n m l
sw n m l
sw
ic
f
=
(4.C2c)
|
|
|
\
|
2
) , , (
0
2
) (
2
) , , (
0
2
2
) , , (
0
2
) , , (
0
) , , (
n
S
n
c S
f
n m l
l
n m l
n m l
n m l
n m l w
E
(4.C3)
The expansion coefficients
) , , )( , , (
~
r q p n m l
b need to be calculated separately for the wave
modes and geostrophic modes with n = 0 and n 0. For the wave modes, we get
n r
n m l n m l
r q p n m l w
I
r q p n m l
n m l
r q p w
E
n m l
iwc
p l
V r q p n m l w
iwc
S S
f
f
f f
b
,
) , , (
0
1
) , , (
0
1
) , , )( , , (
) , , (
0
) , , (
0
) , , (
0
) , , (
) , , ( ) , (
) , , )( , , (
~
(
(
|
|
\
|
=
(4.C4a)
n r
r q p n m l n m l
r q p n m l w
I
n m l l
r q p
r q p n m l
n m l
r q p w
E
n m l
sp
p l
V r q p n m l w
sp
S S S f
c
n
f
f f
i b
,
) , , (
0
1
) , , (
0
1
) , , (
0
1 ) , , )( , , (
2
) , , (
0
2
) (
2
) , , (
0
) , , (
0
) , , (
0
) , , (
0
) , , (
) , , ( ) , (
) , , )( , , (
~
(
(
(
|
|
\
|
=
(4.C4b)
n r p l
n m l
r q p
r q p n m l
n m l
r q p w
E
n m l
sw r q p n m l w
sw
n
f
Af
b
, ,
2
) , , (
0
2
) , , (
0
2
) , , (
0
) , , (
0
) , , (
0
) , , (
) , , (
) , , )( , , (
~
(
(
=
(4.C4c)
where
2
) , , (
2
) , , (
2
) , , (
2
2
) , , (
0
2
) , , (
0
) , , )( , , (
n m l r q p
r q p
r q p
r q p
r q p n m l w
I
S
f
=
(4.C5)
For the geostrophic modes with n = 0, we get
n r
n m l
n m l
r) (q
r q p n m l g
I
r q p g
E
n m l
iwc
p l
V r q p n m l g
iwc
S
f
f
f f
b
,
) , , (
0
-1 ) , , (
0
,
) , , )( , , (
) , , (
) , , ( ) , (
) , , )( , , (
1
2
~
(
(
+
=
(4.C6a)
Application of modal analysis to strongly stratified lakes
112
n r
n m l
- n m l
r q n m l
- r q p n m l g
I
n m l r q p
r q p g
E
n m l
sp
p l
V r q p n m l g
sp
S S f
c
S
n
f
f f
i b
,
) , , (
0
1 ) , , (
0
) , ( ) , , (
0
1 ) , , )( , , (
2
) , , (
0
) , ( ) (
1 -
) , , (
) , , ( ) , (
) , , )( , , (
2
2
~
(
(
( +
=
(4.C6b)
n r l p
r q n m l
-
r q p g
E
n m l
sw r q p n m l g
sw
S
n
f
Af
b
, ,
) , (
2
) , , (
0
1
2
) , , (
) , , (
) , , )( , , (
2
~
(
(
=
(4.C6c)
where
2
) , (
2
) (
2
) , , (
1
n m l
n m l g
E
c
S
f
+ =
(4.C7)
( )
2
2
) , , (
0
2
) , (
) (
1
) , , )( , , (
1
=
S
c
S
f
n m l r q
p
-
r q p n m l g
I
(4.C8)
For geostrophic modes with n 0, the results are:
[ ]
n r
r q p n m l g
I
r q p g
E
n m l
iwc
p l
V r q p n m l g
iwc
f
f
f f
b
,
) , , )( , , (
) , , (
) , , ( ) , (
) , , )( , , (
2
~
=
(4.C9a)
(
(
=
) , , )( , , (
) , , (
0
1
) , , (
) , , ( ) , (
) , , )( , , (
2 0
~
r q p n m l g
I
n m l
-
r q p g
E
n m l
sp
p l
V r q p n m l g
sp
f
S
f
f f
i b
(4.C9b)
0
~
) , , )( , , (
=
r q p n m l g
sw
b
(4.C9c)
The first and second terms in Eqs. 4.C1b, 4.C4b, 4.C6b, and 4.C9 correspond to the
corner jet at r = 1 and the Ekman normal velocity for r < 1, respectively.
Chapter 5. Conclusions
113
Chapter 5. Conclusions
5.1 Summary
Theory of modal analysis was extended to a stratified rotating lake in this thesis. The
method provides a theoretical framework to investigate dynamics of the basin-scale
motions and their effects on mass transport. In this thesis, the method was applied in
following purposes:
- Identification of dominant modes using correlation between horizontal velocity
structure in the surface layer and wind stress pattern over the lake (Chapter 2).
- Extraction of modal amplitudes from simulation results (Chapter 2) and field
data (Chapter 3). The former may be seen as a filtering technique.
- Estimation of damping rates from field data (Chapter 3). This may be seen as a
preliminary application for system identification.
- Estimating spatial variability of mass transfer coefficients (Chapter 3).
- Use of modal expansion (generalized Fourier series) for theoretical application
(Chapter 4).
Application of the modal analysis is not limited to these examples, and some
recommendations for future works are given below.
Through these applications, the following new understandings of lake
hydrodynamics were obtained in this thesis:
- Winds excite modes that induce similar horizontal velocity structure in the
surface layer to the wind stress pattern. As a result, basin-scale internal waves
are preferentially excited in horizontally asymmetric lakes even by spatially
uniform winds, and that gyres in the surface layer are excited by wind stress curl
(Chapter 2).
- Basin-scale internal waves receive most of the energy input from winds, but the
energy is dissipated quickly primarily due to bottom friction (Chapter 2, Chapter
3). Therefore, they transfer energy from the surface to the bottom and provide
energy for near-bottom mass transport. Further, basin-scale internal waves act as
Application of modal analysis to strongly stratified lakes
114
a sort of stabilizer that regulate the energy supply (Chapter 3).
- Gyres receive small portion of the energy input but persist much longer than
internal waves most likely because they are less susceptible to bottom friction
(Chapter 2). They are important for long-term horizontal transport.
- Horizontal structure of dominant internal waves can cause large spatial
variability in near-bottom mixing and mass transfer processes (Chapter 3).
- Bottom friction is able to damp internal waves quickly through internal wave
canceling and spin-down, both of which induce damping without diffusion of
momentum and energy in th lake interior (Chapter 4)
One unique advantage of the modal analysis is that it allows us to obtain general and
conceptual understandings of spatial variability of isopycnal displacement and
horizontal velocity field, and mass transport processes in basins with arbitrary shape
through numerical computation of modes. Such understanding is useful not only for
theoretical studies and detailed research works but also for practical applications, as it
provides a conceptual framework to interpret field data and simulation results in
general. This method fills a gap between analytical methods, which provide general
understandings but often limited to basins with simple geometry, and numerical
methods, which are applicable to general cases but not suitable to obtain conceptual
understandings.
5.2 Recommendations for future work
The following is a list of some recommendations that arose during this study:
- Open boundary Modal analysis presented in this paper is applicable to semi-
enclosed seas where small portion of the boundary is open, as shown by
Platzman (1972) and explained in Appendix 2.A. In the non-dissipative case, the
application is straight forward. If damping is considered, however, waves radiate
the energy to the open ocean, which needs to be modeled to calculate the
damping rates and dissipative modal structure.
- Observation of gyres High-resolution data on gyres appears scare. However,
the dynamics needs to be understood based on field data, as gyres reproduced in
hydrodynamics simulations are determined by the wind field (Chapter 2), which
Chapter 5. Conclusions
115
is usually interpolated from spatially sparse observations. As their energy is
mostly in the kinetic form and their structures are rather degenerate, good spatial
resolution of water velocity data along with the wind field over the lake is
required to understand the dynamics in detail.
- Nonlinear evolution of gyres Evolution of the geostrophic modes in Lake Biwa
appeared nonlinear, but the detail was not investigated (Chapter 2). In principle,
this may be done by including the advection term in the shallow water equations
and obtaining nonlinear modal amplitude equations, in a similar way to the
derivation of spectral form of the Navier-Stokes equations.
- Effects of variable bottom on the modal structure The internal waves in Lake
Kinneret had modal structure that appeared as a superposition of few modes in
the flat-bottomed basin with the same horizontal shape (Chapter 3). A
perturbation method similar to the one used in Chapter 4 may be applied to
investigate how bottom elevation from the horizontal changes the modal
structure.
- Using dissipative modes for the mode fitting The results in Chapter 3 are
obtained using non-dissipative modes. Although this would not change the
energy estimation as explained in Appendix 3.A, the estimated rate coefficients
for near-bottom mass transport processes would be sensitive to the change in the
modal structure, especially near the perimeter. During the study, the
optimization method in Chapter 3 was used with dissipative modes calculated
using the linear bottom friction (Eq. 3.5); however the results were less robust
and showed poor convergence. Choosing a better target function and
optimization scheme, and use of dissipative modes calculated by including the
boundary layer dynamics investigated in Chapter 4 would be necessary for this
purpose.
- Dissipative modal structure in basins with irregular bathymetry In Chapter 4,
we have limited our analysis to a flat-bottomed basin with vertical sidewall. In
order to apply similar method to basins with irregular bathymetry, the
relationship between the Ekman normal velocity and the interior flow on sloping
bottom in stratified rotating basins need to be investigated. Such relationship
may be solved numerically with the shallow water equations, as in Chapter 2 and
Application of modal analysis to strongly stratified lakes
116
Chapter 3, to obtain the damping rates and dissipative modal structure in real
lakes.
- Application of modal analysis to continuously stratified basins with variable
bottom It is possible to calculate three-dimensional modes in continuously
stratified basins with variable bottom in principle; however it appears practically
difficult due to large memory requirement for numerical computation.
Furthermore, the resulting modes are degenerate and the spectrum is dense in a
mathematical sense (Mnnich 1996; Fricker and Neph 2000). These
characteristics of three-dimensional modes would make interpretation of the
calculated modes more difficult, and such application would be suitable only for
limited applications.
Bibliography
117
Bibliography
Akitomo, K., M. Kurogi, and M. Kumagai. 2004. Numerical study of a thermally induced gyre
system in Lake Biwa. Limnology 5: 103-114.
Antenucci, J.P., and J. Imberger. 2001. Energetics of long internal gravity waves in large lakes.
Limnol. Oceanogr. 46: 1760-1773.
Antenucci, J.P., and J. Imberger. 2003. The seasonal evolution of wind/internal wave resonance in
Lake Kinerret. Limnol. Oceanogr. 48: 2055-2061.
Antenucci, J.P., J. Imberger, and A. Saggio. 2000. Seasonal evolution of the basin-scale internal
wave field in a large stratified lake. Limnol. Oceanogr. 45: 1621-1638.
Arfken, G. B., and H. J. Weber. 1995. Mathematical methods for physicists, 4th ed. Academic Press.
Avissar, R., and H. Pan. 2000. Simulations of the summer hydrometeorological processes of Lake
Kinneret. J. Hydrometeor. 1: 95-109.
Baker, M.A., and C.H. Gibson. 1987. Sampling turbulence in the stratified ocean: statistical
consequences of strong intermittency. J. Phys. Oceanogr. 17: 1817-1836.
Barcilon, V., and J. Pedlosky. 1967a. Linear theory of rotating stratified fluid motions. J. Fluid
Mech. 29: 1-16.
Barcilon, V., and J. Pedlosky. 1967b. A unified theory of homogeneous and stratified rotating fluid.
J. Fluid Mech. 29: 609-621.
Buerle, E. 1985. Internal free oscillations in the Lake of Geneva. Ann. Geophys. 3: 199-206.
Benton, E. R., and A. Clark, Jr. 1974. Spin-up. Annu. Rev. Fluid Mech. 6: 257-280.
Birchfield, G.E. 1969. Response of a circular model Great Lake to a suddenly imposed wind stress.
J. Geophys. Res. 74: 5547-5554.
Boegman, L., J. Imberger, G. N. Ivey, and J.P. Antenucci. 2003. High-frequency internal waves in
large stratified lakes. Limnol. Oceanogr. 48: 895-919.
Boegman, L., G.N. Ivey, and J. Imberger. 2005. The degeneration of internal waves in lakes with
sloping topography. Limnol. Oceanogr. 50: 1620-1637.
Brink, K. H. 1982. The effect of bottom friction on low-frequency coastal trapped waves. J. Phys.
Oceanogr. 12: 127-133.
Brink, K. H. 1988. On the effect of bottom friction on internal waves. Cont. Shelf Res. 8: 397-403.
Brink, K. H., and J.S. Allen. 1978. On the effect of bottom friction on barotropic motion over the
continental shelf. J. Phys. Oceanogr. 8: 919-922.
Case, K. M., and W.C. Parkinson. 1957. Damping of surface waves in an incompressible liquid. J.
Fluid Mech. 2: 172-184.
Clarke, A.J., and S.Van Gorder.1986. A method for estimating wind-driven frictional, time-
dependent, stratified shelf and slope water flow. J. Phys. Oceanogr. 16: 1013-1028.
Application of modal analysis to strongly stratified lakes
118
Csanady, G. T. 1967. Large-scale motion in the Great Lakes. J. Geophys. Res. 72: 4151-4162.
Csanady, G. T. 1973. Wind-induced barotropic motions in long lakes. J. Phys. Oceanogr. 3: 429-
438.
Csanady, G.T. 1975. Hydrodynamics of large lakes. Annu. Rev. Fluid Mech. 7: 357-386.
Csanady, G.T. 1982. On the structure of transient upwelling events. J. Phys. Oceanogr. 12: 84-96.
Davey, M. K., W. W. Hsieh, and R.C. Wajsowicz. 1983. The free Kelvin wave with lateral and
vertical viscosity. J. Phys. Oceanogr. 13: 2182-2191.
Dillon, T.M., and D.R. Caldwell. 1980. The Batchelor spectrum and dissipation in the upper ocean.
J. Geophys. Res. 85: 1910-1916.
Dore, B. D. 1968. The viscous damping of internal waves on the rotating earth. Pure and Appl.
Geophys. 71: 118-131.
Duck, P. W., and M.R. Foster. 2001. Spin-up of homogeneous and stratified fluid. Annu. Rev. Fluid
Mech. 33: 231-263.
Eckert, W., J. Imberger, and A. Saggio. 2002. Biogeochemical response to physical forcing in the
water column of a warm monomictic lake. Biogeochemistry 61: 291-307.
Emery, K.O., and G.T. Csanady. 1973. Surface circulation of lakes and nearly land-locked seas.
Proc. Nat. Acad. Sci. USA. 70: 93-97.
Endoh, S. 1986. Diagnostic study on the vertical circulation and the maintenance mechanism of the
cyclonic gyre in Lake Biwa. J. Geophys. Res. 91: 869-876.
Endoh, S., and Y. Okumura. 1993. Gyre system in Lake Biwa derived from recent current
measurements. Jpn. J. Limnol. 54: 191-197.
Endoh, S., Y. Okumura, and I. Okamoto. 1995a. Field Observation in the North Basin, p. 15-29. In
S. Okuda, J. Imberger and M. Kumagai [eds.], Physical Processes in a large lake: Lake Biwa,
Japan. American Geophysical Union.
Endoh, S., M. Watanabe, H. Nagata, F. Maruo, T. Kawae, C. Iguchi, and Y. Okumura. 1995b. Wind
fields over Lake Biwa and their effect on water circulation. Jpn. J. Limnol. 56: 269-278.
Etemad-Shahidi, A., and J. Imberger. 2001. Anatomy of turbulence in thermally stratifield lakes.
Limnol. Oceanogr. 46: 1158-1170.
Fricker, P.D., and H.M. Nepf. 2000. Bathymetry, stratification, and internal seiche structure. J.
Geophys. Res. 105: 14237-14251.
Gill, A.E. 1982. Atmosphere-ocean dynamics. Academic Press.
Gloor, M., A. West, and D.M. Imboden. 2000. Dynamics of mixed bottom boundary layers and its
implications for diapycnal transport in a stratified, natural water basin. J. Geophys. Res. 105:
8629-8646.
Bibliography
119
Gloor, M., A. West, and M. Mnnich. 1994. Benthic boundary mixing and resuspension induced by
internal seiches. Hydrobiologia. 284: 59-68.
Gmez-Giraldo, A., J. Imberger, and J.P. Antenucci. 2006. Spatial structure of the dominant basin-
scale internal waves in Lake Kinneret. Limnol. Oceanogr. 51: 229-246.
Greenspan, H.P. 1968. The theory of rotating fluid. Cambridge University Press.
Hayami, Y., T. Fujiwara, and M. Kumagai. 1996. Internal surge in Lake Biwa induced by strong
winds of a typhoon. Jpn. J. Limnol. 57: 425-444.
Hodges, B.R., J. Imberger, A. Saggio, and K.B. Winters. 2000. Modeling basin-scale internal waves
in a stratified lake. Limnol. Oceanogr. 45: 1603-1620.
Hodges, B.R., B. Laval, and B.M. Wadzuk. 2006. Numerical error assessment and a temporal
horizon for internal waves in a hydrostatic model. Ocean model. 13: 44-64.
Horn, D.A., J. Imberger, and G.N. Ivey. 2001. The degeneration of large-scale interfacial gravity
waves in lakes. J. Fluid Mech. 434: 181-207.
Huang, J.C.K. 1971. The thermal current in Lake Michigan. J. Phys. Oceanogr. 1: 105-122.
Hunt, J. N. 1952. Viscous damping of waves over an inclined bed in a channel with finite width. La
Houille Blanche 7: 836-842.
Hunt, J.N., and B. Johns. 1963. Currents induced by tides and gravity waves. Tellus 15: 343-351.
Hurley, D.G., and J. Imberger. 1969. Surface and internal waves in a liquid of variable depth. B.
Aust. Math. Soc. 1: 29-46.
Imberger, J. 1998. Flux paths in a stratified lake: A review, p. 1-18. In J. Imberger [ed.], Physical
processes in lakes and oceans. American Geophysical Union.
Imberger, J., and G.N. Ivey. 1993. Boundary mixing in stratified reservoirs. J. Fluid Mech. 248: 477-
491.
Ivey, G.N., and R.I. Nokes. 1989. Vertical mixing due to the breaking of critical internal waves on
sloping boundaries. J. Fluid Mech. 204: 479-500.
Johns, B. 1968. A boundary layer method for the determination of the viscous damping of small
amplitude gravity waves. Q. J. Mech. Appl. Math. 21: 93-103.
Kalaba, R., K. Spingarn, L. Tesfatsion. 1981. Variational equations for the eigenvalues and
eigenvectors of nonsymmetric matrices. J. Optimiz. Theory and App. 33: 1-8.
Kanari, S. 1974. On the study of numerical experiments of two layer Lake Biwa. Jpn. J. Limnol. 35:
1-17.
Kanari, S. 1975. The long-period internal waves in Lake Biwa. Limnol. Oceanogr. 20: 544-553.
Kumagai M., Y. Asada, and S. Nakano. 1998. Gyres measured by ADCP in Lake Biwa, p. 199-208.
In J. Imberger [ed.], Physical Processes in Lakes and Oceans. American Geophysical Union.
Lamb, H. 1932. Hydrodynamics, 6
th
ed. Dover.
Application of modal analysis to strongly stratified lakes
120
Laval, B.E., J. Imberger, and A.N. Findikakis. 2005. Dynamics of a large tropical lake: Lake
Maracaibo. Aquat. Sci. 67: 337-349.
Laval, B.E., J. Imberger, B.R. Hodges, and R. Stocker. 2003. Modeling circulation in lakes: Spatial
and temporal variations. Limnol. Oceanogr. 48: 983-994.
LeBlond, P. H. 1966. On the damping of internal gravity waves in a continuously stratified ocean. J.
Fluid Mech. 25: 121-142.
Lemckert, C., J. Antenucci, A. Saggio, and J. Imberger. 2004. Physical properties of turbulent
benthic boundary layers generated by internal waves. J. Hydraul. Eng. 130: 58-69.
Lemmin, U., C.H. Motimer, and E. Buerle. 2005. Internal seiche dynamics in Lake Geneva.
Limnol. Oceanogr. 50: 207-216.
Lighthill, M.J. 1969. Dynamic response of the Indian Ocean to onset of the southwest monsoon.
Phil. Trans. R. Soc. Lond. Ser. A. 265: 45-92.
Lighthill, J. 1978. Waves in fluids. Cambridge University Press.
Lorke, A., B. Mller, M. Maerki, and A. West. 2003. Breathing sediments: The control of diffusive
transport across the sediment-water interface by periodic boundary-layer turbulence. Limnol.
Oceanogr. 48: 2077-2085.
Lorke, A., F. Peeters, and A. West. 2005. Shear-induced convective mixing in bottom boundary
layers on slopes. Limnol. Oceanogr. 50: 1612-1619.
Marti, C.L., and J. Imberger. 2006. Dynamics of the benthic boundary layer in a strongly forced
stratified lake. Hydrobiologia 568: 217-233.
Martinsen, E. A., and J. E. Weber. 1981. Frictional influence on internal Kelvin waves. Tellus 33:
402-410.
Mei, C.C., and L.F. Liu. 1973. The damping of surface gravity waves in a bounded liquid. J. Fluid
Mech. 59: 239-256.
Mitsudera, H., and K. Hanawa. 1988. Damping of coastal trapped waves due to bottom friction in a
baroclinic ocean. Cont. Shelf Res. 8: 113-129.
Mofjeld, H. O. 1980. Effects of vertical viscosity on Kelvin waves. J. Phys. Oceanogr. 10: 1039-
1050.
Monismith, S.G. 1985. Wind-induced motions in stratified lakes and their effect on mixed-layer
shear. Limnol. Oceanogr. 30: 771-783.
Monismith, S.G., J. Imberger, and M.L. Morison. 1990. Convective motions in the sidearm of a
small reservoir. Limnol. Oceanogr. 35: 1676-1702.
Mortimer, C.H. 1953. The resonant response of stratified lakes to wind. Schweiz. Z. Hydrol. 15: 94-
151.
Mortimer, C.H. 1974. Lake hydrodynamics. Mitt. Internat. Verein. Limnol. 20: 124-197.
Bibliography
121
Mnnich, M. 1996. The influence of bottom topography on internal seiches in stratified media. Dyn.
Atmos. Oceans 23: 257-266.
Nishri, A., J. Imberger, W. Eckert, I. Ostrovsky, and Y. Geifman. 2000. The physical regime and the
respective biogeochemical processes in the lower water mass of Lake Kinneret. Limnol.
Oceanogr. 45: 972-981.
Okamoto, I., and S. Endoh. 1995. Water mass exchange between the main basin and Shiozu Bay, p.
31-42. In S. Okuda, J. Imberger and M. Kumagai [eds.], Physical Processes in a large lake:
Lake Biwa, Japan. American Geophysical Union.
Okely, P., and J. Imberger. 2007. Horizontal transport induced by upwelling in a canyon-shaped
reservoir. Hydrobiologia. 586: 343-355.
Osborn, T.R., and C.S. Cox. 1972. Oceanic fine structure. Geophys. Fluid Dyn. 3: 321-345.
Ou, H.W., and J.R. Bennett. 1979. A theory of the mean flow driven by long internal waves in a
rotating basin, with application to Lake Kinneret. J. Phys. Oceanogr. 9: 1112-1125.
Pan, H., R. Avissar, and D.B. Haidvogel. 2002. Summer circulation and temperature structure of
Lake Kinneret. J. Phys. Oceanogr. 32: 295-313.
Pedlosky, J. 1979. Geophysical fluid dynamics. Springer-Verlag.
Platzman, G.W. 1972. Two-dimensional free oscillations in natural basins. J. Phys. Oceanogr. 2:
117-138.
Platzman, G.W. 1975. Normal modes of the Atlantic and Indian Oceans. J. Phys. Oceanogr. 5: 201-
221.
Platzman, G.W. 1984. Normal modes of the world ocean. Part III: A procedure for tidal synthesis. J.
Phys. Oceanogr. 14: 1521-1531.
Proudman, J. 1929. On a general expansion in the theory of the tides. Proc. London Math. Soc. 29:
527-536.
Rao, D.B. 1966. Free gravitational oscillations in rotating rectangular basins. J. Fluid Mech. 25: 523-
555.
Rao, D.B., and D.J. Schwab. 1976. Two dimensional normal modes in arbitrary enclosed basins on a
rotating earth: Application to Lakes Ontario and Superior. Phil. Trans. R. Soc. Lond. A. 281:
63-96.
Raudsepp, U., D. Beletsky, and D.J. Schwab. 2003. Basin-scale topographic waves in the Gulf of
Riga. J. Phys. Oceanogr. 33: 1129-1140.
Ravens, T.M., O. Kocsis, A. West, and N. Granin. 2000. Small-scale turbulence and vertical
mixing in Lake Baikal. Limnol. Oceanogr. 45: 159-173.
Rhines, P.B. 1969. Slow oscillations in an ocean of varying depth. Part 1. Abrupt topography. J.
Fluid Mech. 37: 161-189.
Application of modal analysis to strongly stratified lakes
122
Romea, R. D., and J.S. Allen. 1984. The effect of friction and topography on coastal internal Kelvin
waves at low latitude. Tellus 36A: 384-400.
Rueda, F.J., S.G. Schladow, S.G. Monismith, and M.T. Stacey. 2005. On the effects of topography
on wind and the generation of currents in a large multi-basin lake. Hydrobiologia. 532: 139-
151.
Rueda, F.J., S.G. Schladow, and S.. Plmarsson. 2003. Basin-scale internal wave dynamics during
a winter cooling period in a large lake. J. Geophys. Res. 108: 3097,
doi:10.1029/2001JC000942.
Saggio, A., and J. Imberger. 1998. Internal wave weather in a stratified lake. Limnol. Oceanogr. 43:
1780-1795.
Saggio, A., and J. Imberger. 2001. Mixing and turbulent fluxes in the metalimnion of a stratified
lake. Limnol. Oceanogr. 46: 392-409.
Schwab, D.J. 1977. Internal free oscillations in Lake Ontario. Limnol. Oceanogr. 22: 700-708.
Schwab, D.J., and D. Beletsky. 2003. Relative effects of wind stress curl, topography, and
stratification on large-scale circulation in Lake Michigan. J. Geophys. Res. 108: 3004,
doi:10.1029/2001JC001066.
Schwab, D.J., W.P. OConnor, and G.L. Mellor. 1995. On the net cyclonic circulation in large
stratified lakes. J. Phys. Oceanogr. 25: 1516-1520.
Serruya, S. 1975. Wind, water temperature and motions in Lake Kinneret: general pattern. Verh.
Internat. Verein. Limnol. 19: 73-87.
Shimizu, K., and J. Imberger. In Press. Energetics and damping of internal waves in a strongly
stratified lake. Limnol. Oceanogr.
Shimizu, K., J. Imberger, and M. Kumagai. 2007. Horizontal structure and excitation of primary
motions in a strongly stratified lake. Limnol. Oceanogr. 52: 2641-2655.
Simanjuntak, A.M., J. Imberger, K. Nakayama, and T. Ishikawa. Benthic and interfacial mixing in a
shallow salt-wedge estuary. Submitted to J. Hydraul. Eng.
Spence, G. S. M., M.R. Foster, and P.A. Davis.1992. The transient response of a contained rotating
stratified fluid to impulsively started surface forcing. J. Fluid Mech. 243: 33-50.
Steinberger, N., and M. Hondzo. 1999. Diffusional mass transfer at sediment-water interface. J.
Environ. Eng. 125: 192-200.
Stewartson, K. 1957. On almost rigid rotation. J. Fluid Mech. 3: 17-26.
Stocker, R., and J. Imberger. 2003. Energy partitioning and horizontal dispersion in a stratified
rotating lake. J. Phys. Oceanogr. 33: 512-529.
Thorpe, S.A. 1987. Current and temperature variability on the continental slope. Phil. Trans. R. Soc.
Lond. Ser. A 323: 471-517.
Bibliography
123
Timoshenko, S., D.H. Young, and W. Weaver, Jr. 1974. Vibration problems in engineering, 4th ed.
John Wiley and Sons.
Ursell, F. 1952. Edge waves on a sloping beach. Proc. Roy. Soc. A 214: 79-97.
van Dorn, W. G. 1966. Boundary dissipation of oscillatory waves. J. Fluid Mech. 24: 769-779.
van Dyke, M. 1964 Perturbation methods in fluid mechanics. Academic Press.
Vlasenko, V.I., and K. Hutter. 2002. Transformation and disintegration of strongly nonlinear internal
waves by topography in stratified lakes. Annales Geophysicae 20: 2087-2103.
Wake, G.W., G.N. Ivey, and J. Imberger. 2005. The temporal evolution of baroclinic basin-scale
waves in a rotating circular basin. J. Fluid Mech. 523: 367-392.
Walin, G. 1969. Some aspects of time-dependent motion of a stratified rotating fluid. J. Fluid Mech.
36: 289-307.
Wang, Y., K. Hutter, and E. Buerle. 2000. Wind-induced baroclinic response of Lake Constance.
Ann. Geophys. 18: 1488-1501.
West, A., and A. Lorke. 2003. Small-scale hydrodynamics in lakes. Annu. Rev. Fluid Mech. 35:
373-412.
West, A., G. Piepke, and D.C. Van Senden. 2000. Turbulent kinetic energy balance as a tool for
estimating vertical diffusivity in wind-forced stratified waters. Limnol. Oceanogr. 45: 1388-
1400.
Yeates, Y., and J. Imberger. 2004. Pseudo two-dimensional simulations of internal and buoyancy
fluxes in stratified lakes and reservoirs. Intl. J. River Basin Management. 1: 1-23.
Yeates, P.S., J. Imberger, and A. Gmez-Giraldo. Turbulent mixing intensity and its relationship to
the Gradient Richardson Number. Submitted to Limnol. Oceanogr.
Potrebbero piacerti anche
- Generator ControllerDocumento21 pagineGenerator ControllerBrianHazeNessuna valutazione finora
- 978 3 319 59597 9 PDFDocumento236 pagine978 3 319 59597 9 PDFprigogineNessuna valutazione finora
- LYNX 40 Drilling Mud DecanterDocumento2 pagineLYNX 40 Drilling Mud DecanterPierluigi Ciampiconi0% (1)
- Scrum Handbook: Scrum Training Institute PressDocumento66 pagineScrum Handbook: Scrum Training Institute PressFranky RiveroNessuna valutazione finora
- Curvelets, Wave Atoms, and Wave Equations: Thesis byDocumento202 pagineCurvelets, Wave Atoms, and Wave Equations: Thesis byTigol DoNessuna valutazione finora
- Windows Intrusion Detection ChecklistDocumento10 pagineWindows Intrusion Detection ChecklistJosé Tomás García CáceresNessuna valutazione finora
- Liquid TanksDocumento142 pagineLiquid Tanksbogo_bogdanNessuna valutazione finora
- Stochastic Wave Loads On Tubular Offshore Structures - O - Ditlevsen - 2003Documento129 pagineStochastic Wave Loads On Tubular Offshore Structures - O - Ditlevsen - 2003Tommaso MassaiNessuna valutazione finora
- Household: Ucsp11/12Hsoiii-20Documento2 pagineHousehold: Ucsp11/12Hsoiii-20Igorota SheanneNessuna valutazione finora
- Ship Dynamics PDFDocumento40 pagineShip Dynamics PDFainiNessuna valutazione finora
- Mechanics of Coastal Sediment TransportDocumento393 pagineMechanics of Coastal Sediment TransportKrakozyabra100% (7)
- Wave MechanicsDocumento117 pagineWave MechanicsZahurul IslamNessuna valutazione finora
- Autodesk Nastran In-CAD PDFDocumento43 pagineAutodesk Nastran In-CAD PDFFernando0% (1)
- Modelling of Mechanical Systems: Structural ElementsDa EverandModelling of Mechanical Systems: Structural ElementsValutazione: 4 su 5 stelle4/5 (1)
- YavorskyDocumento544 pagineYavorskyFilipe PadilhaNessuna valutazione finora
- Dynamic Response of Concrete Rectangular Liquid Tanks in Three-Dimensional Space PDFDocumento142 pagineDynamic Response of Concrete Rectangular Liquid Tanks in Three-Dimensional Space PDFDhirendra Kumar PandeyNessuna valutazione finora
- Taebi Soheila 2012 PDFDocumento152 pagineTaebi Soheila 2012 PDFAzhafiz AbdullahNessuna valutazione finora
- PHD Wicaksono 2019 PDFDocumento145 paginePHD Wicaksono 2019 PDFEric KulbiejNessuna valutazione finora
- Turbidity Currents and Their Deposits: Annual Review of Fluid Mechanics January 2010Documento51 pagineTurbidity Currents and Their Deposits: Annual Review of Fluid Mechanics January 2010jyoti tanwarNessuna valutazione finora
- Roos JSM 2011 PHD Thesis PDFDocumento281 pagineRoos JSM 2011 PHD Thesis PDFDương Tiến TrungNessuna valutazione finora
- MitDocumento300 pagineMitGlenn TøråNessuna valutazione finora
- FINAL e Theis For e Prints Ramli 25843141Documento233 pagineFINAL e Theis For e Prints Ramli 25843141ning.anNessuna valutazione finora
- DeAnna Sewell ThesisDocumento69 pagineDeAnna Sewell ThesisShokoofeAlaviNessuna valutazione finora
- Investigation The Combination of Ultrasound and Electrokinetic As Mechanisms To Enhance Sludge Dewatering - MSC ThesisDocumento85 pagineInvestigation The Combination of Ultrasound and Electrokinetic As Mechanisms To Enhance Sludge Dewatering - MSC ThesisDr. Ziad Shakeeb Al SarrafNessuna valutazione finora
- MQ 22125Documento225 pagineMQ 22125Anonymous vjQmaeANessuna valutazione finora
- Han R 2011Documento84 pagineHan R 2011Jay KayeNessuna valutazione finora
- CCHE2D Two Dimensional Hydrodynamic and Sediment Transport Model For Unsteady Open Channel Flows Over Loose Bed PDFDocumento89 pagineCCHE2D Two Dimensional Hydrodynamic and Sediment Transport Model For Unsteady Open Channel Flows Over Loose Bed PDFBC ECNessuna valutazione finora
- Title PDFDocumento164 pagineTitle PDFdefrNessuna valutazione finora
- 3.2 Fluid Mechanics 3-NotesDocumento45 pagine3.2 Fluid Mechanics 3-NotesBrian NjorogeNessuna valutazione finora
- PhDThesis BurianiFDocumento181 paginePhDThesis BurianiFFrancis Ervin SalengaNessuna valutazione finora
- Mohan P Shell DissertationDocumento164 pagineMohan P Shell Dissertationsuvabrata_das010% (1)
- The Boundary Layer at The Bottom of A Solitary Wave and Implications For Sediment TransportDocumento11 pagineThe Boundary Layer at The Bottom of A Solitary Wave and Implications For Sediment TransportSuntoyo SajaNessuna valutazione finora
- 13 - Development of A Comprehensive Linear Response History Analysis Procedure For Seismic Load Analysis PDFDocumento312 pagine13 - Development of A Comprehensive Linear Response History Analysis Procedure For Seismic Load Analysis PDFSergio A Castro GiraldoNessuna valutazione finora
- Bayesian Monte Carlo Inversion of Multiple Data Sets To Image TheDocumento209 pagineBayesian Monte Carlo Inversion of Multiple Data Sets To Image TheRohit kumarNessuna valutazione finora
- Large-Scale Dynamics of The Convection Zone and TachoclineDocumento139 pagineLarge-Scale Dynamics of The Convection Zone and TachoclineMelinda NagyNessuna valutazione finora
- 2015 LectureNote NewDocumento95 pagine2015 LectureNote NewHardianti YunusNessuna valutazione finora
- Flow Around Bluff Bodies With Corner Modifications On Cross-SectiDocumento104 pagineFlow Around Bluff Bodies With Corner Modifications On Cross-SectiLuis RiosNessuna valutazione finora
- FulltextDocumento66 pagineFulltextmohammed dawNessuna valutazione finora
- Yao Unc 0153D 17675Documento162 pagineYao Unc 0153D 17675weilaiNessuna valutazione finora
- Renewable and Sustainable Energy Reviews: M.A. Benitz, M.A. Lackner, D.P. SchmidtDocumento25 pagineRenewable and Sustainable Energy Reviews: M.A. Benitz, M.A. Lackner, D.P. SchmidtHasan SaeedNessuna valutazione finora
- Cameron Takemori Thesis FinalDocumento155 pagineCameron Takemori Thesis FinalJose Manuel Gonzalez ContrerasNessuna valutazione finora
- Classical-Mechanics-DHSM 07 07 2019 PDFDocumento127 pagineClassical-Mechanics-DHSM 07 07 2019 PDFSachintha udayankaNessuna valutazione finora
- Carianne Ecoboat DamperDocumento112 pagineCarianne Ecoboat Damperajik indiantoNessuna valutazione finora
- Hydro NotesDocumento109 pagineHydro NotestomekzawistowskiNessuna valutazione finora
- Dynamic Analysis of A Subsea ModuleDocumento110 pagineDynamic Analysis of A Subsea ModuleAnonymous PibYPghNessuna valutazione finora
- Design of An Air Breathing Electric Thruster For Cubesat ApplicatDocumento122 pagineDesign of An Air Breathing Electric Thruster For Cubesat ApplicatPNessuna valutazione finora
- AfdDocumento110 pagineAfdPalash KumarNessuna valutazione finora
- Fluid Dynamics: Submitted byDocumento24 pagineFluid Dynamics: Submitted byZani UsmanNessuna valutazione finora
- Study OF Hydropower Optimization IN Sri Lanka: Final ReportDocumento107 pagineStudy OF Hydropower Optimization IN Sri Lanka: Final ReportMinidu PradeepthaNessuna valutazione finora
- Hydro NotesDocumento109 pagineHydro NotesVipul KumarNessuna valutazione finora
- Sand Foundation Instability Due To Wave-Seabed-Structure Dynamic InteractionDocumento114 pagineSand Foundation Instability Due To Wave-Seabed-Structure Dynamic InteractionmohandesbinNessuna valutazione finora
- Electric-Magnetic Duality and The Geometric Langlands ProgramDocumento231 pagineElectric-Magnetic Duality and The Geometric Langlands ProgramEliacim VelezNessuna valutazione finora
- Yi Fu The Analysis of The International Legal Water Regime of The Mekong River BasinDocumento261 pagineYi Fu The Analysis of The International Legal Water Regime of The Mekong River BasinSovanrangsey KongNessuna valutazione finora
- ThesisDocumento137 pagineThesisDhinesh KalaimaranNessuna valutazione finora
- Tidal PowerDocumento12 pagineTidal PowerOpenTalkNessuna valutazione finora
- AWMSGAB Volume II PDFDocumento264 pagineAWMSGAB Volume II PDFTusharGuptaNessuna valutazione finora
- Experimental Study On Viscoelastic Fluid-Structure InteractionsDocumento59 pagineExperimental Study On Viscoelastic Fluid-Structure InteractionsNICA ELLA TABUENANessuna valutazione finora
- 79559876Documento127 pagine79559876Asghar FarhadiNessuna valutazione finora
- aidanWimshurstThesis PDFDocumento258 pagineaidanWimshurstThesis PDFdoğancan uzunNessuna valutazione finora
- Ubc 2012 Fall Starzyk CynthiaDocumento207 pagineUbc 2012 Fall Starzyk CynthiaAbbas HaiderNessuna valutazione finora
- 4 - Reactor StaticsDocumento64 pagine4 - Reactor StaticselsayedNessuna valutazione finora
- Mass TransferDocumento171 pagineMass TransferPavithiran YogarajahNessuna valutazione finora
- 2001 Book MagnetofluiddynamicsInChannelsDocumento210 pagine2001 Book MagnetofluiddynamicsInChannelsPOKO POGONessuna valutazione finora
- Exoplanetary Atmospheres: Theoretical Concepts and FoundationsDa EverandExoplanetary Atmospheres: Theoretical Concepts and FoundationsNessuna valutazione finora
- Remedy MidTier Guide 7-5Documento170 pagineRemedy MidTier Guide 7-5martin_wiedmeyerNessuna valutazione finora
- Chapter 1 4Documento76 pagineChapter 1 4Sean Suing100% (1)
- Sickle Cell DiseaseDocumento10 pagineSickle Cell DiseaseBrooke2014Nessuna valutazione finora
- 6 Uec ProgramDocumento21 pagine6 Uec Programsubramanyam62Nessuna valutazione finora
- Assessing The Marks and Spencers Retail ChainDocumento10 pagineAssessing The Marks and Spencers Retail ChainHND Assignment Help100% (1)
- Ariba Collaborative Sourcing ProfessionalDocumento2 pagineAriba Collaborative Sourcing Professionalericofx530Nessuna valutazione finora
- MiddleWare Technology - Lab Manual JWFILESDocumento171 pagineMiddleWare Technology - Lab Manual JWFILESSangeetha BajanthriNessuna valutazione finora
- EDB Postgres Failover Manager Guide v2.1Documento86 pagineEDB Postgres Failover Manager Guide v2.1Anggia MauritianaNessuna valutazione finora
- Marieb ch3dDocumento20 pagineMarieb ch3dapi-229554503Nessuna valutazione finora
- Perturbation MethodsDocumento29 paginePerturbation Methodsmhdr100% (1)
- Assignment RoadDocumento14 pagineAssignment RoadEsya ImanNessuna valutazione finora
- Watch One Piece English SubDub Online Free On Zoro - ToDocumento1 paginaWatch One Piece English SubDub Online Free On Zoro - ToSadeusuNessuna valutazione finora
- Sodexo GermanyDocumento13 pagineSodexo GermanySandeep Kumar AgrawalNessuna valutazione finora
- Durability of Prestressed Concrete StructuresDocumento12 pagineDurability of Prestressed Concrete StructuresMadura JobsNessuna valutazione finora
- Level Swiches Data SheetDocumento4 pagineLevel Swiches Data SheetROGELIO QUIJANONessuna valutazione finora
- Chestionar 2Documento5 pagineChestionar 2Alex AndruNessuna valutazione finora
- Pontevedra 1 Ok Action PlanDocumento5 paginePontevedra 1 Ok Action PlanGemma Carnecer Mongcal50% (2)
- Uts Cmo Module 5Documento31 pagineUts Cmo Module 5Ceelinah EsparazNessuna valutazione finora
- Operational Readiness and Airport TransferDocumento2 pagineOperational Readiness and Airport TransferochweriNessuna valutazione finora
- FHHR 013 Red Tag Procedure PDFDocumento5 pagineFHHR 013 Red Tag Procedure PDFN3N5YNessuna valutazione finora
- Taxation Law 1Documento7 pagineTaxation Law 1jalefaye abapoNessuna valutazione finora
- Junos ErrorsDocumento2 pagineJunos ErrorsrashidsharafatNessuna valutazione finora
- Auto Turn-Off For Water Pump With Four Different Time SlotsDocumento3 pagineAuto Turn-Off For Water Pump With Four Different Time SlotsKethavath Sakrunaik K100% (1)
- Dept & Sem: Subject Name: Course Code: Unit: Prepared byDocumento75 pagineDept & Sem: Subject Name: Course Code: Unit: Prepared by474 likithkumarreddy1Nessuna valutazione finora