Potrebbero piacerti anche
- XE145NDocumento36 pagineXE145NCemikaNessuna valutazione finora
- P111Documento214 pagineP111saba.excel7698100% (1)
- AWG To MM#Documento2 pagineAWG To MM#aimizaNessuna valutazione finora
- LV Power Cable Schedule For CHPLSS2-3VYN492201-6.Documento4 pagineLV Power Cable Schedule For CHPLSS2-3VYN492201-6.superthambiNessuna valutazione finora
- MPSS 6.6KV SWBD Trafo Feeder-13 P.No:10 Relay TestDocumento1 paginaMPSS 6.6KV SWBD Trafo Feeder-13 P.No:10 Relay TestSubramaniam NPNessuna valutazione finora
- PFC Price List 15 Sept 2013 EpcosDocumento24 paginePFC Price List 15 Sept 2013 EpcosAnonymous SDeSP1100% (1)
- Versatile Microcontroller Based Scanner ManualDocumento16 pagineVersatile Microcontroller Based Scanner ManualkpbaijuNessuna valutazione finora
- Cable Trench DrawingDocumento1 paginaCable Trench DrawingAMIT VIJAYVARGI100% (1)
- Calculate Idmt PDFDocumento6 pagineCalculate Idmt PDFShuvan MabuNessuna valutazione finora
- Masibus 85XX+ - R3F - 0219 ScannerDocumento4 pagineMasibus 85XX+ - R3F - 0219 ScannerchinnathambijNessuna valutazione finora
- Calculate IDMT Over Current Relay Setting (50 - 51) - Electrical Notes & ArticlesDocumento3 pagineCalculate IDMT Over Current Relay Setting (50 - 51) - Electrical Notes & ArticlesSheraz KhanNessuna valutazione finora
- Calculation of V For 1.6 Mva Transformer Neutral (6.6Kv/0.433Kv)Documento2 pagineCalculation of V For 1.6 Mva Transformer Neutral (6.6Kv/0.433Kv)kapilNessuna valutazione finora
- Restricted Earth Fault Protection-Lv (Mcag14) : Stabilising Voltage CalculationDocumento3 pagineRestricted Earth Fault Protection-Lv (Mcag14) : Stabilising Voltage CalculationarsathnmaNessuna valutazione finora
- Control Cable - Trafo BayDocumento25 pagineControl Cable - Trafo BayAnupam0103Nessuna valutazione finora
- Earth Fault RelayDocumento52 pagineEarth Fault RelayAgung MohamadNessuna valutazione finora
- Diagrams Attach 4Documento6 pagineDiagrams Attach 4tej070784Nessuna valutazione finora
- Relay EquivalentDocumento4 pagineRelay EquivalenttogirishsharmaNessuna valutazione finora
- 03 Directional OvercurrentDocumento10 pagine03 Directional OvercurrentM Kumar MarimuthuNessuna valutazione finora
- Client: Project: Motor: 800 HP Motor Case: Utility Supply & Base Data: TransformerDocumento4 pagineClient: Project: Motor: 800 HP Motor Case: Utility Supply & Base Data: TransformerKren AnNessuna valutazione finora
- Specification Att - 3-18 - 6-51-0032 20rev 205 - Spec For Medium Voltage Induction MotorsDocumento15 pagineSpecification Att - 3-18 - 6-51-0032 20rev 205 - Spec For Medium Voltage Induction MotorsAvinash ShuklaNessuna valutazione finora
- Jvs Manual JRD 011Documento5 pagineJvs Manual JRD 011ashutosh20090% (1)
- 20 - Current Transformer (Mag Electric) PDFDocumento5 pagine20 - Current Transformer (Mag Electric) PDFsaina124796010Nessuna valutazione finora
- Acsr Moose ConductorDocumento17 pagineAcsr Moose ConductorRam Dhani Yadav100% (1)
- CVT Comments ArkayDocumento3 pagineCVT Comments ArkaySridhar Reddy GandraNessuna valutazione finora
- BE1 40Q Loss of Excitation RelayDocumento45 pagineBE1 40Q Loss of Excitation RelayAngie LeónNessuna valutazione finora
- FM Spae01 en BDocumento12 pagineFM Spae01 en BSudhakar YsNessuna valutazione finora
- Hardware Fittings BOQ (IDB Lot-II)Documento6 pagineHardware Fittings BOQ (IDB Lot-II)tanujaayerNessuna valutazione finora
- SA2007-000028 - en Differential Protection For Special Power Transformers With RET 670Documento11 pagineSA2007-000028 - en Differential Protection For Special Power Transformers With RET 670shyam_krishnan_16Nessuna valutazione finora
- (A) Time Graded (B) Current Graded (C) Combination of Time Graded and Current Graded SystemDocumento31 pagine(A) Time Graded (B) Current Graded (C) Combination of Time Graded and Current Graded SystemAnuja TipareNessuna valutazione finora
- Transformer Protection and Control RET620: Application ManualDocumento112 pagineTransformer Protection and Control RET620: Application ManualDBachai84Nessuna valutazione finora
- Pee Lab ManualDocumento77 paginePee Lab ManualRajendraTuraka100% (1)
- Turbine Generator Protection SchemeDocumento7 pagineTurbine Generator Protection SchemepmlikrishnaNessuna valutazione finora
- 3 Cycle Vs 5 CycleDocumento2 pagine3 Cycle Vs 5 Cyclesantoshreddy4601950Nessuna valutazione finora
- Harmonics Transformer de RatingDocumento6 pagineHarmonics Transformer de RatingFabricio Dias CoimbraNessuna valutazione finora
- Deep Bar Vis-À-Vis Double Cage Rotor Design For Large MV MotorsDocumento2 pagineDeep Bar Vis-À-Vis Double Cage Rotor Design For Large MV MotorsSUBRATA BISWASNessuna valutazione finora
- 3kl Superswitch Catalogue 3k 2016Documento28 pagine3kl Superswitch Catalogue 3k 2016skpadala74Nessuna valutazione finora
- 12 - 0274 - 1875kVA - 6.6kV - Data Sheet-Enquiry PDFDocumento2 pagine12 - 0274 - 1875kVA - 6.6kV - Data Sheet-Enquiry PDFpurushyanNessuna valutazione finora
- O13071-E-Re-Ge-St-1001-Rev-A-Cable Tray Support Calculation For Type-1,2,3,4Documento82 pagineO13071-E-Re-Ge-St-1001-Rev-A-Cable Tray Support Calculation For Type-1,2,3,4Praveen KumarNessuna valutazione finora
- Transformers Losses Nov 2013Documento4 pagineTransformers Losses Nov 2013saji kumarNessuna valutazione finora
- Power Transformer - 1M - CDocumento3 paginePower Transformer - 1M - CahmedelgharibNessuna valutazione finora
- EE-447 Power System Analysis I: Problem 1Documento5 pagineEE-447 Power System Analysis I: Problem 1Jayabalan R KNessuna valutazione finora
- ! - 1979 - Drouet, M., & Nadeau, F. - Pressure Waves Due To Arcing Faults in A SubstationDocumento4 pagine! - 1979 - Drouet, M., & Nadeau, F. - Pressure Waves Due To Arcing Faults in A SubstationMikeNessuna valutazione finora
- Directional OverDocumento28 pagineDirectional OverEdinson Milton Gaona BarbozaNessuna valutazione finora
- Cable Design for Trapezoidally Shaped ConductorDocumento1 paginaCable Design for Trapezoidally Shaped ConductorkjkljkljlkjljlkNessuna valutazione finora
- IRI PRO V3 CatalogueDocumento14 pagineIRI PRO V3 CatalogueThomas Joseph100% (2)
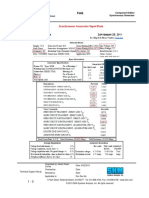
- Synchronous Generator Input DataDocumento3 pagineSynchronous Generator Input DataSharat Chandra KeswarNessuna valutazione finora
- Shifting Transformer Damage Curves For Through-Fault Current ProtectionDocumento7 pagineShifting Transformer Damage Curves For Through-Fault Current Protectionrobertosenior100% (1)
- UEEDocumento90 pagineUEEVicky MouryaNessuna valutazione finora
- Options:: Useful Formulas Formulas Transformer FormulasDocumento5 pagineOptions:: Useful Formulas Formulas Transformer FormulasMustafaMirNessuna valutazione finora
- P345 CortecDocumento7 pagineP345 CortecHari Krishna.MNessuna valutazione finora
- CORONA With Peek S Law PDFDocumento127 pagineCORONA With Peek S Law PDFEmilio ClavelNessuna valutazione finora
- List of Is Standards For Substation EquipmentsDocumento9 pagineList of Is Standards For Substation EquipmentsRajj Pruthivi100% (1)
- Basics of The RET-670:: Ret-670 Relay Calculation ProcedureDocumento9 pagineBasics of The RET-670:: Ret-670 Relay Calculation ProcedurevenkateshbitraNessuna valutazione finora
- ABB Motors and Technical Data Sheet Generators: No. Data Unit RemarksDocumento5 pagineABB Motors and Technical Data Sheet Generators: No. Data Unit RemarksMashudi FikriNessuna valutazione finora
- KSH International Enamelled Copper Conductors/Strips BrochureDocumento2 pagineKSH International Enamelled Copper Conductors/Strips Brochurekshintl100% (1)
- Transformer Circulating Current CalculationDocumento2 pagineTransformer Circulating Current CalculationInayat HathiariNessuna valutazione finora
- 4000A - 2x100x12mm - CU (OPEN D)Documento4 pagine4000A - 2x100x12mm - CU (OPEN D)Dramebaaz SandeepNessuna valutazione finora
- Symmetrical components and per-unit calculations for relay engineersDocumento98 pagineSymmetrical components and per-unit calculations for relay engineersjbrenner85Nessuna valutazione finora
- Power Transformers and ReactorsDocumento49 paginePower Transformers and ReactorsroyclhorNessuna valutazione finora
- Jackson - Classical Electrodynamics 3rd EditionDocumento833 pagineJackson - Classical Electrodynamics 3rd EditionDeb Goldberg95% (19)
- ATP ManualDocumento270 pagineATP ManualJose Jorge Fontalvo100% (1)
- Expo PotenciaDocumento46 pagineExpo PotenciaDiego Nicolás López-RamírezNessuna valutazione finora
- Self Excitation of Induction MotorsDocumento5 pagineSelf Excitation of Induction MotorsDiego Nicolás López-RamírezNessuna valutazione finora
- VHDL CookbookDocumento111 pagineVHDL Cookbookcoolboyz81990Nessuna valutazione finora
- Induction Generator Theory and ApplicationDocumento8 pagineInduction Generator Theory and ApplicationDiego Nicolás López-RamírezNessuna valutazione finora
- Power System Stability and Control-Prabha KundurDocumento600 paginePower System Stability and Control-Prabha KundurDiego Nicolás López-Ramírez100% (4)
- ImagesDocumento8 pagineImagesDiego Nicolás López-RamírezNessuna valutazione finora
- Capacitance IIDocumento15 pagineCapacitance IIDiego Nicolás López-RamírezNessuna valutazione finora
- CapacitanceDocumento4 pagineCapacitanceDiego Nicolás López-RamírezNessuna valutazione finora
- MCQDocumento23 pagineMCQnandhakumarme100% (1)
- Current and Voltage RelationshipDocumento4 pagineCurrent and Voltage RelationshipMike AndayaNessuna valutazione finora
- Objective Type Question or MCQ of Transmission and DistributionDocumento62 pagineObjective Type Question or MCQ of Transmission and Distributionkibrom atsbha83% (18)
- Effects of Harmonics On Power SystemsDocumento6 pagineEffects of Harmonics On Power SystemsLammie Sing Yew LamNessuna valutazione finora
- Alternating Current - Ex # 1 - 4Documento19 pagineAlternating Current - Ex # 1 - 4Sagar AroraNessuna valutazione finora
- EE 589A-Introduction To Power Engineering: Midterm Exam Friday, 10/22/2021, 120 MinutesDocumento5 pagineEE 589A-Introduction To Power Engineering: Midterm Exam Friday, 10/22/2021, 120 MinutesShawnNessuna valutazione finora
- Distribution Line Ferroresonance Causes Abnormal ConditionsDocumento31 pagineDistribution Line Ferroresonance Causes Abnormal ConditionsRouel LeonenNessuna valutazione finora
- Circuits 3 ProblemDocumento5 pagineCircuits 3 ProblemraramalazaNessuna valutazione finora
- Alternating Current PDFDocumento9 pagineAlternating Current PDFrajNessuna valutazione finora
- IOE Nepal BCT Year 1 Part 1 SyllabusDocumento19 pagineIOE Nepal BCT Year 1 Part 1 SyllabusBulmi HilmeNessuna valutazione finora
- Harmonic Analyses and Mitigation in Large Industrial Steel Plants A Case StudyDocumento7 pagineHarmonic Analyses and Mitigation in Large Industrial Steel Plants A Case StudyAshish MishraNessuna valutazione finora
- Impact of Inverter-Based Resources On Impedance-Based Protection FunctionsDocumento6 pagineImpact of Inverter-Based Resources On Impedance-Based Protection Functionsamina bu bakerNessuna valutazione finora
- Flexible AC Transmission Systems (FACTSDocumento33 pagineFlexible AC Transmission Systems (FACTSJeevan KumarNessuna valutazione finora
- 3.RC Coupled AmplifierDocumento27 pagine3.RC Coupled AmplifierMrs. P. Ganga BhavaniNessuna valutazione finora
- Resistor color codes and DC circuits explainedDocumento9 pagineResistor color codes and DC circuits explainedGale Vera caceresNessuna valutazione finora
- Tablas Distri ELT3751 PDFDocumento7 pagineTablas Distri ELT3751 PDFFreddy Lopez GonzalesNessuna valutazione finora
- Thyristor Controlled Series CompensatorDocumento19 pagineThyristor Controlled Series Compensatorshivanagendra koya100% (2)
- By Guy Fletcher, VK2KU: 16 Jan/Feb 2000Documento7 pagineBy Guy Fletcher, VK2KU: 16 Jan/Feb 2000Mauro MarafonNessuna valutazione finora
- EEE - 122 - Exp1 (8 Files Merged)Documento5 pagineEEE - 122 - Exp1 (8 Files Merged)SHAJEDA AKTHER 2102154Nessuna valutazione finora
- Chapter 3 Iec 60909Documento6 pagineChapter 3 Iec 60909Fran R JayNessuna valutazione finora
- Journeyman PDFDocumento87 pagineJourneyman PDFLilet P. DalisayNessuna valutazione finora
- KENDRIYA VIDYALAYA CHENNAI REGION SAMPLE PHYSICS PAPERDocumento8 pagineKENDRIYA VIDYALAYA CHENNAI REGION SAMPLE PHYSICS PAPERUpendra MandalNessuna valutazione finora
- APA-1 (100Q) (Electrostatics, DC Circuits, Capacitors, Magnetism) (JEE 2020)Documento22 pagineAPA-1 (100Q) (Electrostatics, DC Circuits, Capacitors, Magnetism) (JEE 2020)Vedant TodiNessuna valutazione finora
- PCB Designer's SI GuideDocumento144 paginePCB Designer's SI GuideAdrian-Ioan PetrariuNessuna valutazione finora
- Applying Power System Stabilizers Part I - General ConceptsDocumento8 pagineApplying Power System Stabilizers Part I - General ConceptsAshwani GargNessuna valutazione finora
- Tutorial Chapter 2Documento5 pagineTutorial Chapter 2AmmyNessuna valutazione finora
- Villamor Test - 2 PDFDocumento18 pagineVillamor Test - 2 PDFLocrian IonianNessuna valutazione finora
- Effects of Harmonics On Power SystemsDocumento8 pagineEffects of Harmonics On Power SystemsHassan AliNessuna valutazione finora
- Mfj-269c User ManualDocumento40 pagineMfj-269c User ManualHappyJoeNessuna valutazione finora
- Cable Sizing CalculationDocumento68 pagineCable Sizing CalculationJoseph B Delos Reyes100% (1)