Potrebbero piacerti anche
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Syllabus 3210 Fall 2012 PDFDocumento4 pagineSyllabus 3210 Fall 2012 PDFRahul KarnaNessuna valutazione finora
- Chemical Principles Notes Chapter 7Documento86 pagineChemical Principles Notes Chapter 7Robert GardnerNessuna valutazione finora
- His To GramsDocumento15 pagineHis To GramsMaryam HasanNessuna valutazione finora
- Truefire Guitar Chord Cookbook PDFDocumento101 pagineTruefire Guitar Chord Cookbook PDFeuripides7794% (17)
- 11Documento47 pagine11Felipe Retamal100% (1)
- Datasheets A S50ib enDocumento2 pagineDatasheets A S50ib envantuan17792Nessuna valutazione finora
- Math 11-CORE Gen Math-Q2-Week 1Documento26 pagineMath 11-CORE Gen Math-Q2-Week 1Christian GebañaNessuna valutazione finora
- Midterm Exam Summary For Data Communications PDFDocumento9 pagineMidterm Exam Summary For Data Communications PDFKit Jason MonjeNessuna valutazione finora
- Class 10 Science Chapter 2 Revision NotesDocumento16 pagineClass 10 Science Chapter 2 Revision NotesKriish RatnaniNessuna valutazione finora
- Alkyl Halides and Amines Mcqs KeyDocumento3 pagineAlkyl Halides and Amines Mcqs KeySameer HussainNessuna valutazione finora
- Dish Washer Mcachine ProjectDocumento43 pagineDish Washer Mcachine ProjectVijay Powar60% (5)
- Three-Dimensional Lithium-Ion Battery ModelDocumento35 pagineThree-Dimensional Lithium-Ion Battery ModelmortezagashtiNessuna valutazione finora
- Staircase Preliminary Design Based On NBC and IS CodeDocumento10 pagineStaircase Preliminary Design Based On NBC and IS CodeEducation. HubNessuna valutazione finora
- Guar Gum: Product Data Sheet (PDS)Documento1 paginaGuar Gum: Product Data Sheet (PDS)Moatz HamedNessuna valutazione finora
- Arthashastra: Citation NeededDocumento4 pagineArthashastra: Citation NeededtusharNessuna valutazione finora
- Perfection v700 Photo PDFDocumento90 paginePerfection v700 Photo PDFAlex1963alexNessuna valutazione finora
- Compressor Anti-Surge ValveDocumento2 pagineCompressor Anti-Surge ValveMoralba SeijasNessuna valutazione finora
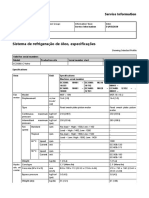
- Sistema de Refrigeração de Óleo, EspecificaçõesDocumento2 pagineSistema de Refrigeração de Óleo, EspecificaçõesAlexandreNessuna valutazione finora
- Chapter 2 Approaches To Software DesignDocumento25 pagineChapter 2 Approaches To Software DesigntarunkakkarNessuna valutazione finora
- Normativ Panouri SandwichDocumento58 pagineNormativ Panouri SandwichAlex ChiraNessuna valutazione finora
- Guide c07 742458Documento14 pagineGuide c07 742458Chen ComseNessuna valutazione finora
- SampleDocumento43 pagineSampleSri E.Maheswar Reddy Assistant ProfessorNessuna valutazione finora
- List NotesDocumento27 pagineList NotesMohit MauryaNessuna valutazione finora
- 5 6075614737821859916Documento10 pagine5 6075614737821859916Siston MakafuNessuna valutazione finora
- RS 385SHDocumento3 pagineRS 385SHshahpinkalNessuna valutazione finora
- Virtual Memory & Demand PagingDocumento22 pagineVirtual Memory & Demand PagingAli AhmadNessuna valutazione finora
- Lab Guide #2 Coulombs LawDocumento3 pagineLab Guide #2 Coulombs LawJoriel CruzNessuna valutazione finora
- Shaw, Milton C. Metal Cutting PrinciplesDocumento759 pagineShaw, Milton C. Metal Cutting PrinciplesJuan Sebastian Quinche Velandia75% (4)
- Prob AnswersDocumento4 pagineProb AnswersDaniel KirovNessuna valutazione finora
- 02-Stoichiometric CalculationsDocumento47 pagine02-Stoichiometric CalculationsHandayani KesumadewiNessuna valutazione finora