Documenti di Didattica
Documenti di Professioni
Documenti di Cultura
Apuntes de Dinámica (Soko)
Caricato da
Ma Luisa Cuevas RiveraCopyright
Formati disponibili
Condividi questo documento
Condividi o incorpora il documento
Hai trovato utile questo documento?
Questo contenuto è inappropriato?
Segnala questo documentoCopyright:
Formati disponibili
Apuntes de Dinámica (Soko)
Caricato da
Ma Luisa Cuevas RiveraCopyright:
Formati disponibili
Dinmica
Autora: Silvia Sokolovsky
Hasta este momento hemos descrito al movimiento de una partcula sin preguntarnos que lo causa. Este problema fue un
tema central para la denominada Filosofa Naturalque sostena la necesaria influencia externa (una fuerza) para
mantener un cuerpo en movimiento. Cuando esta fuerza se acababa crean que el cuerpo se detena volviendo a lo que
consideraban su estado natural. De esta suposicin se desprenda que un cuerpo ms pesado (mayor fuerza interior)
deba caer ms de prisa que un cuerpo liviano. Fue Galileo Galilei (1564 1642) el primero en darse cuenta de lo falso
de esta hiptesis. Desde lo alto de la Torre de Pisa dej caer, desde la misma altura, dos esferas de igual tamao pero de
diferente peso, ambas cayeron el mismo tiempo. (Si no lo crees toma dos objetos de diferente peso y djalos caer desde
una misma altura)
Galileo estudi las causas del movimiento pero fue Newton (1641 1727) quin les dio forma y las compil en tres
principios a los que hoy llamamos principios de Newton.
Principios de Newton
Si para mantener un cuerpo en movimiento no hace falta una fuerza, entonces, qu se necesita?. La respuesta es: nada.
Si mueves el pi sobre el piso vas a sentir como "algo" se opone a ese deslizamiento. Si el piso est encerado ese
"algo" disminuye en intensidad, hasta podramos imaginar una superficie tan encerada que esa resistencia
desaparecera por completo. En esta situacin, luego de impulsarnos, nada nos detendra, seguiramos a velocidad
constante y en lnea recta.
Hagamos un pequeo experimento.
Toma un papel, un lpiz y colcalos como muestra la figura. Tira fuerte del papel.
Por qu no se mueve el lpiz del lugar?. Piensa que ests haciendo fuerza sobre el
papel, al lpiz no lo tocas, Por qu debera moverse ?
Si no aplicamos una fuerza exterior a un cuerpo este permanece quieto o
movindose a velocidad constante y en lnea recta. (M. R. U.)
Acabamos de enunciar el primer principio de Newton que se llama principio de inercia. Es a causa de este principio
que al arrancar el colectivo sientes ese empujn hacia atrs.
Sigamos analizando el sistema papel - lpiz.
Vuelve a armar el dispositivo. Mueve el papel lentamente; esta vez el lpiz se mueve
tambin. A qu se debe este comportamiento?. Si tiras fuerte del papel el lpiz se queda
en un mismo lugar, pero si tiras despacio el til de escritura acompaa al
desplazamiento.
La clave de lo que sucede est en la fuerza que realizamos para sacar al papel. Tomemos
un libro y coloqumoslo sobre el papel y repitamos la experiencia. Si tiramos con fuerza del papel el libro no se mueve,
si tiramos despacio se mueve con l. Si colocamos varios libros sucesivamente sobre el papel llegar el momento en
que, tirando suavemente de l, no podamos mover el sistema. Existe una interaccin entre la superficie de contacto del
papel y la de los libros, existe una fuerza que se opone a este movimiento, esta fuerza se denomina friccin.
La friccin es la responsable que un cuerpo que est en movimiento sobre el suelo se detenga.
" Ya sea para arrancar, detener, acelerar o desacelerar una partcula siempre debemos aplicar una fuerza exterior a l ".
La fuerza y la aceleracin son dos magnitudes vectoriales directamente proporcionales, F ~ a. Matemticamente se
necesita una magnitud constante para establecer una igualdad, fsicamente esa constante es la masa del cuerpo: F
= m . a
Por supuesto que no siempre que apliquemos una fuerza podremos mover un cuerpo, si no trata de mover una pared . . .
Hagamos nuevamente un pequeo experimento.
Saluda a la persona que tengas al lado dndole la mano; el sistema mano mano no se mueve en direccin derecha
o izquierda, por que en l intervienen dos fuerzas, una de cada mano. Estas fuerzas tienen la misma
direccin, la misma intensidad (mdulo) pero sus sentidos son opuestos.
Tambin vemos este par de fuerzas (del
mismo mdulo, igual direccin y sentidos
opuestos) al aplaudir. Nuestras manos se
mueven en sentidos opuestos, chocan. En el momento del
choque, cada mano hace fuerza sobre la otra. La superficie de la
piel "reacciona" a esa fuerza con otra de igual intensidad, igual direccin y sentido opuesto. A una de ellas se la
denomina accin a la otra reaccin.
Otro ejemplo, cuando estamos parados, a nuestro peso (accin) se opone la fuerza del piso que nos sostiene (reaccin),
de otro modo se rompera y caeramos.
Resumiendo, siempre tenemos dos opciones: podemos o no aplicar una fuerza. Si no la aplicamos una fuerza exterior
estamos frente al principio de inercia. Si la aplicamos una fuerza exterior, tambin tenemos dos posibilidades: el cuerpo
puede moverse o quedarse quieto. Si se mueve, estamos frente al segundo principio de Newton, el principio de masa.
En caso de que no se mueva estamos frente al tercer principio de Newton, el principio de accin y reaccin.
Al resolver un problema lo primero que debemos fijarnos es que principio se cumple.
Peso y masa: El peso de un cuerpo no es otra cosa que la fuerza de atraccin gravitacional ejercida por la Tierra;
magnitud vectorial cuya direccin siempre es perpendicular al suelo y su sentido apunta hacia l. Si dejamos un cuerpo
en el aire, el peso lo har caer y la aceleracin que experimenta es la gravedad, lo que implica que debemos aplicar el
segundo principio de Newton para poder calcular su magnitud.
La fuerza ejercida es el peso ( P) que suplantar a F en la frmula, mientras que la aceleracin g har lo
correspondiente con a.
Entonces en vez de F = m . a tendremos P = m . g
La masa se mide en kilogramos y la fuerza tambin, pero aunque la unidad de cada magnitud se escuche parecido
resultan muy diferentes una de otra, no debemos confundirlas.
Un kilo de masa (1 Kg.) pesa en nuestro planeta un kilo, pero en el espacio su peso se reduce a medida que se aleja de
la superficie de la Tierra. El peso de un cuerpo depende de la distancia que se encuentre de este planeta, de su masa y la
masa terrestre, como lo expresa Newton con su famosa ley de atraccin gravitacional universal
En esta ecuacin m y m' representan a las masas de los cuerpos, d a la distancia en que se encuentran y F a la fuerza de
atraccin (el peso en nuestro caso).
Si nuestro planeta variara en su cantidad de masa nosotros variaramos en nuestro peso, de igual manera al aumentar o
disminuir nuestra masa corporal aumentamos o disminuimos de peso.
Para diferenciar el kilogramo masa del kilogramo fuerza se lleg a un acuerdo, se escribe Kg. cuando se habla de masa
y Kgr. al referirnos al kilogramo fuerza.
Cunto pesa 1 Kg.?
Utilicemos el principio de masa con el valor de la aceleracin de la gravedad 10 m/seg.
2
P = m . g = 1 Kg. 10 m/seg
2
= 10 Kg. m. seg.
- 1
N (Newton) (es como se llama a esta unidad de fuerza.)
El sistema de medicin que utiliza al Newton como unidad de fuerza se denomina M.K.S. (metros, kilogramos,
segundos)
De esa manera queda establecido que 1Kgr. = 10 N
Fuerza: Todos tenemos una nocin intuitiva de fuerza. Sabemos que para sostener un cuerpo debemos hacer un
esfuerzo, al que llamamos "fuerza" y admitimos que esa fuerza tiene por objetivo equilibrar
la que ejerce el cuerpo como consecuencia de su peso.
Ahora extiende tu brazo y presiona sobre la pared ms cercana; hacer fuerza con el brazo
extendido nos permite ver los elementos que encontramos dentro de las fuerzas (por
supuesto que estos atributos son imaginarios). Con un color sealamos la recta a la que
pertenece la fuerza que hacen los brazos de este hombre (La recta es la direccin de la
fuerza que ejerce el hombre), la flecha indica el sentido (hacia donde hace la fuerza). En el
lenguaje cotidiano direccin y sentido son sinnimos pero la fsica tiene sus propios
cdigos y aqu estos dos trminos son muy distintos.
Si pegamos a un objeto delicadamente hacemos menos fuerza que si le pegamos con rabia,
la cantidad de una fuerza vara. El mdulo indica solamente la cantidad de fuerza que se hace sin importar el sentido
que ella tenga.
Entonces, qu elementos encontramos en una fuerza?
"Direccin, sentido y mdulo."
Casualmente hay un elemento matemtico que tiene esos mismos elementos, es el
" vector ".
Vemos la relacin existente entre la matemtica y la fsica.
Hablemos de las fuerzas colineales: llevan ese nombre las fuerzas que poseen igual
direccin pero no necesariamente el mismo sentido.
Deja en la mesa la birome y con el dedo ndice empjala desde un extremo, vas a ver que se mueve. Ahora si la
empujas con el dedo ndice de cada mano sobre el mismo extremo. Cada dedos hace fuerza con igual direccin y igual
sentido, resultando, de ambos, una fuerza mayor que antes. De esa manera podemos indicar que: "las fuerzas de
igual sentido se suman"
Coloca los dos dedos ndices en cada extremo y haz fuerza. La fuerza resultante en este caso es menor que la hecha por
cada dedo. Si comparemos la direccin de cada fuerza, siguen siendo la misma , pero sus sentidos son opuestos. De esa
manera podemos indicar que: " las fuerzas de sentidos opuestos se restan "
Aqu necesitamos destacar un principio importantsimo en fsica "los signos indican sentidos" .
As que si dos fuerzas van a la izquierda podramos decir que son negativas y si van a la derecha, diremos que son
positivas. (Atencin, la eleccin positiva o negativa de los sentidos es arbitraria)
En nuestra vida cotidiana las fuerzas pueden ser colineales, paralelas o secantes (las que se cortan en un punto). Como
son fuerzas, pueden ser representadas por vectores.
Hay varias formas de hallar la resultante, veamos la forma grfica:
Mtodo del Paralelogramo: Qu caractersticas tiene un paralelogramo? Sus lados opuestos son paralelos y de igual
longitud.
Para hallar la resultante sigue los pasos siguientes:
1.- Traza las rectas paralelas a cada fuerza, por sus extremos (con lneas punteadas )
2.- Une con una lnea el punto de interseccin de las paralelas y el punto de origen de las fuerzas. (Esa es la resultante,
no olvidar que es una fuerza por consiguiente un vector)
3.- Calcula el valor de la resultante.
Mtodo Poligonal: Deriva del mtodo anterior, pero es ms fcil para trabajar con varias fuerzas.
Para hallar la resultante sigue los pasos siguientes:
1.- Traza la rectas paralelas a F
2
desde el extremo de F
1
(con lneas punteadas)
2.- Toma la medida de esa fuerza y desde su extremo (flecha del vector) traza la siguiente
3.- Un con una lnea el extremo de la ltima fuerza con el punto de origen de las fuerzas. (Esa es la resultante, no
olvidar que es una fuerza por consiguiente un vector)
4.- Calcula el valor de la resultante.
Si hay ms de dos fuerzas se traza una fuerza detrs de la otra (ojo con la direccin de cada una); cuando se dibuj la
ltima fuerza se traza la resultante desde el punto de origen de las fuerzas hasta el extremo de la ltima fuerza.
Mtodo Analtico: (sumatoria de fuerzas)
En este preciso instante existen fuerzas actuando sobre tu cuerpo y no te das cuenta. Si intentas saltar la fuerza de
gravedad va obligar a volver al piso. No hay manera de escapar a su influencia, al menor en cualquier punto de la
superficie de nuestro planeta. Toma una birome (cualquier objeto sirve), levntala con la mano. Si sueltas la birome
caer sobre la mesa (o alguna superficie horizontal). El peso es el responsable de su cada pero por qu se detuvo?
qu la detuvo?. Al analizar los principios de dinmica vimos que lo nico que puede acelerar o detener un cuerpo es
una fuerza externa al sistema. Por lo que debemos suponer que la mesa "hizo fuerza" para detener la cada de la
birome. Los slidos tienen la capacidad de "hacer fuerza"!.
Hagamos un simple experimento, para ello necesitamos
tres monedas (pueden ser fichas). Pongamos un
moneda sobre la mesa bajo nuestro dedo ndice,
asegurndonos que no se pueda mover. Coloquemos otra
moneda a su lado de manera que estn en contacto. La
tercera moneda sala para golpear, de costado, a la que
est sujeta a tu dedo. Su compaera saldr disparada alejndose de tu ndice. Si le pegas a la moneda que tienes en tu
dedo, desde arriba, no sucede nada.
Por qu si pegas de costado la moneda se mueve y si pegas desde arriba no? ...
Siempre que intervengan fuerzas en un sistema (sobre un cuerpo o no) necesitaremos aplicar los principios de
dinmica.
Si aplicamos una fuerza de costado (cuando la moneda choca la que tu sostienes), la moneda que est bajo tu dedo no
se mover debido a la accin de fuerza de rozamiento que hay entre la moneda; tu dedo y la superficie de la mesa (hay
una fuerza de rozamiento en cada cara de la moneda) este fenmeno es explicado por el principio de accin y reaccin.
Pero la otra moneda, la que est libre puede moverse pues no hay fuerza que se oponga (el rozamiento entre la moneda
y la superficie de la mesa no es suficiente).
Es importante destacar que por ms fuerte que apretemos el dedo contra la moneda, sta no se va a mover ( principio de
accin y reaccin ); debe existir una fuerza de la misma direccin, mismo mdulo
que la suma de la fuerza de tu dedo y el peso de la moneda, pero sentido contrario. sta fuerza siempre tendr direccin
perpendicular al suelo. Una recta perpendicular a otra se denomina "normal", es por eso que a esta fuerza se la
denomina"fuerza normal".
Fuerza de rozamiento: La fuerza de rozamiento, tambin llamada friccin, surge de la relacin entre la naturaleza de
la superficie (del piso para poner un ejemplo) y la reaccin de esa superficie al peso ( a la proyeccin del peso si es un
plano inclinado).
Debemos hacer una distincin entre la fuerza de rozamiento de un cuerpo esttico y la friccin de un cuerpo en
movimiento. La fuerza de rozamiento esttica (cuerpo quieto) es mayor que la que acta sobre un cuerpo en
movimiento. Se necesitan ms personas para empujar un auto parado que para llevarlo una vez que arranc.
Matemticamente la fuerza de rozamiento y la reaccin del piso son directamente proporcionales, para establecer una
igualdad se necesita una constante, el valor constante de la proporcin est determinado por el coeficiente de
rozamiento (). Por supuesto que el coeficiente esttico (
e
) es mayor, numricamente, que el coeficiente dinmico
(
d
).
e >
d .
F
r
= . N
(Se denomina normal (N) a la reaccin del piso a todas las fuerzas que actan sobre esa superficie)
Cantidad de Movimiento: Al aplicarse una fuerza es evidente que la velocidad de un cuerpo cambia, cambia "la
cantidad de movimiento" de ese cuerpo, y la cantidad de movimiento puede medirse fsicamente.
Tenemos un cuerpo que tiene una masa m, (valor escalar) el que adquiere una velocidad determinada al aplicrsele una
fuerza exterior. La masa y la velocidad resultan ser inversamente proporcionales ya que, a igual magnitud de fuerza, si
la masa aumenta al doble su velocidad se reducir a la mitad. Expresado de una manera ms sencilla, si empujamos al
mouse adquirir mayor velocidad que si empujamos, con la misma cantidad de fuerza, a la CPU.
Al ser inversamente proporcionales, la masa y la velocidad se multiplican para obtener un valor constante. La
velocidad es un vector mientras que la masa una magnitud escalar, matemticamente al multiplicar un vector por un
escalar obtendremos otro vector. Fsicamente ese vector producto entre la masa y la velocidad se denomina cantidad de
movimiento y se lo designa con la letra p:
La segunda ley de Newton fue expresada en base a la variacin de la cantidad de movimiento en funcin del tiempo, es
decir que si se aplica una fuerza exterior a un cuerpo este experimentar una variacin de cantidad de movimiento a
medida que transcurre el tiempo.
F = Ap/ At (como p = m . v) F = A(m . v)/ At (m es una constante, por lo tanto slo la velocidad puede variar)
F = m . Av/ At (recordando que a = Av/ At ) tenemos que: F = m . a
La variacin de la cantidad de movimiento se conoce con el nombre de mpetu, que se designa con la letra I.
"I = Ap"
De esa manera tenemos que F = I / At (despejando) I = F . At.
Colisin (Choque): Imaginemos a dos machos cabros con sus imponentes cornamentas, enfrentados en un combate
por un territorio repleto de hembras. Los dos magnficos animales se levantan sobre sus patas traseras "impulsndose"
para descender a topetazos sobre su oponente. Este violento encuentro ilustra perfectamente la situacin de una colisin
donde actan fuerzas externas relativamente grandes durante un tiempo estimativamente corto.
Como podemos determinar la posicin de cada animal durante todo el proceso, podemos tratarlos fsicamente como si
fueran partculas.
Si bien la idea bsica de una colisin es que, en movimiento o quietas, dos o ms partculas (o por lo menos una de
ellas) cambian bruscamente su direccin, lo que es muy evidente es el cambio de velocidad que experimentan las
partculas involucradas antes y despus del choque..
Durante la colisin la fuerza vara de una manera tan compleja que resulta muy complicada medirla. Estas fuerzas,
denominadas impulsivas, actan durante un brevsimo instante.
Lo que hay que estacar es que la cantidad de movimiento se mantiene constante.
La cantidad de movimiento, como se ha visto, es el producto entre la masa y la velocidad. As que tendremos la
cantidad de movimiento de cada partcula antes y despus del choque, la cantidad total de movimiento (la suma de las
cantidades de movimientos de ambos cuerpos) sern iguales antes y despus de chocar.
Si ambas partculas quedaran "adheridas" en un solo cuerpo en movimiento, el choque se denominar plstico. Pero si
rebotaran separndose, el choque se designar con el nombre de elstico.
Choque plstico: m
a
.v
a
+ m
b
v
b
= v (m
a
+ m
b
)
Choque elstico: m
a
.v
a
+ m
b
v
b
= m
a
.v
a
+ m
b
v
b
Ejercicio Explicado:
Una bala de 0,05 kg. masa se desplaza con una velocidad de 350 m/seg. cuando impacta sobre un bloque de madera,
de 0,36 Kg. de masa, incrustndose en l. a) Hallar la velocidad con que se mueve el sistema luego del choque.
Solucin: Al impactar la bala queda incrustada dentro del bloque de madera, por lo cual podemos suponer despus del
impacto ambos cuerpos se desplazan juntos. Estamos frente a un choque plstico, en el cual, antes del choque, la bala
se encuentra movindose mientras que el bloque est quieto (velocidad inicial cero).
Datos: v
bala
= 350 m/seg, m
bala
= 0,05 kg, v
madera
= 0 m/seg., m
madera
= 0,36 Kg.
Incgnita: v
.
= ?. (velocidad bala madera).
Apliquemos la ecuacin del choque plstico y reemplacemos por sus respectivos valores.
m
bala
.v
bala
+ m
madera
v
madera
= v (m
bala
+ m
madera
) 350 m/seg . 0,05 Kg + 0 = v (0,41 Kg)
v = 42,683 m/seg.
Plano Inclinado: Los movimientos rectilneos en la vida real no se producen sobre superficies planas; aunque el piso
as lo parezca no lo es pues pertenece a una superficie curva. Lo que sucede es que esta porcin es tan pequea
comparada con la de nuestro planeta que la vemos plana.
Reduzcamos el problema analizando los movimientos sobre curvas y rectas en vez de superficies.
Pequeos segmentos consecutivos (con distinta direccin), todos juntos, darn la impresin de formar una curva. A la
inversa, si tenemos una pequea porcin de una curva la veremos recta, la direccin de esta coincidir con la recta
tangente en ese punto.
Si necesitamos analizar un movimiento sobre una superficie inclinada (como la de una colina) podemos simplificar la
dificultad de nuestro trabajo considerando toda la superficie como plana, y tomar una seccin transversal, de esa
manera estudiamos lo que sucede como si fuera un movimiento rectilneo. Para ello utilizamos el plano inclinado que
no es otra cosa que un tringulo rectngulo, donde por el lado ms largo (la hipotenusa) se desplaza el cuerpo.
Diagrama de Cuerpo libre :
Al estudiar los distintos tipos de movimientos hacamos coincidir al eje x con el suelo en movimientos horizontales,
mientras que para los verticales tombamos la lnea perpendicular al piso, el eje y.
Como ya se haba explicado, el peso es la fuerza gravitacional con que nos atrae la tierra
hacia su centro. Esa direccin es perpendicular a la recta tangente de su superficie en
cualquier punto, es por eso que el peso se dibuja como un vector perpendicular al piso.
Como la recta perpendicular al suelo tiene la misma direccin que el eje y, podemos
superponer al vector peso con este eje de manera que P se ubique sobre el eje y. Por
supuesto que la reaccin de esta superficie al peso, la fuerza normal, tambin la
encontramos sobre el ejey. Anlogamente, cualquier fuerza que desplace (acelerando o
frenando) horizontalmente al cuerpo puede ubicarse sobre el eje x.
Todas las fuerzas que acten sobre un cuerpo pueden representarse sobre un eje de coordenadas. Se
denomina diagrama de cuerpo libre al eje de coordenadas donde estn "dibujadas" todas las fuerzas que actan sobre
un cuerpo (sin ser necesario dibujar al cuerpo).
Si tenemos ms de un cuerpo en un sistema, tendremos que hacer un diagrama de cuerpo libre para cada uno.
Supongamos que la fuerza aplicada sobre el cuerpo no tuviera la misma direccin del eje x o del eje y. Tenemos una
fuerza "F" que se encuentra formando un ngulo o con el suelo; como el eje x es paralelo al piso, F y el eje x tambin
forman un ngulo cuya amplitud es o.
Hagamos el diagrama de cuerpo libre:
Tracemos rectas paralelas a los ejes que pasen por el pice (extremo) de F, de esa
forma tendremos los componentes de la fuerza F sobre los ejes de coordenadas, F
x
y
F
y
.
Entre los tres vectores (F, F
x
y F
y
) queda formado un tringulo rectngulo donde F es la hipotenusa, F
x
es el cateto
adyacente respecto de o y F
y
es el cateto opuesto, por lo tanto utilizando las funciones trigonomtricas tenemos:
De esa manera podemos analizar la accin de una o ms fuerzas sobre un cuerpo y ubicarlas en un diagrama de cuerpo
libre para estudiar sus efectos.
Cuerpos Vinculados: En un problema cualquiera se debe hacer el diagrama de cuerpo libre para cada uno de los
cuerpos involucrados indicando las fuerzas que actan en cada uno de ellos. Pongamos un ejemplo para que podamos
entender que es lo que ocurre.
Ac tenemos dos cuerpos de distintas masas. Slo con ver el sistema sabemos que: m
1
es el menor; sobre m
2
acta una
fuerza.
Como existe una cuerda que los une tendremos fuerzas a las que
denominaremos tensiones. Por supuesto que cada uno tiene su peso y ste
est equilibrado por una normal. Dibujemos el sistema con todas las
fuerzas que actan en l.
Por el principio de masa tenemos que P = m . g (ver principio de masa). La
reaccin al peso de la superficie donde se mueve el sistema es la normal de
cada uno de los cuerpos. Aunque est de ms decirlo, ambas normales tienen
mdulos diferentes pues dependen del valor del peso de cada cuerpo.
Sobre el cuerpo m
2
acta una fuerza y la cuerda ejerce otra fuerza sobre el
cuerpo m
1
a la que llamaremos tensin. El "tirn" de la cuerda provoca una reaccin sobre m
2
que posee la misma
direccin, el mismo mdulo pero sentido contrario que la tensin, por lo tanto se anulan entre s. Como la reaccin a
esta tensin tiene sentido contrario su signo es negativo (signos indican sentidos).
Hagamos el diagrama de cuerpo libre para cada cuerpo:
Analicemos las acciones de las fuerzas sobre cada eje:
Eje x: T = m
1
. a * Eje x: F T = m
2
. a *
Eje y: N
1
P
1
= 0 ^ Eje y: N
2
P
2
= 0 ^
* Como sobre el eje x pueden moverse aplicamos el principio de masa (siempre y cuando no se muevan a velocidad
constante)
^ Como sobre el eje y no pueden moverse la sumatoria de las fuerzas es cero.
Tomemos las ecuaciones de los ejes que pueden desplazarse con libertad (eje x en este caso) y summoslos miembro a
miembro:
(se despeja lo que se deba despejar)
Ahora que ya has terminado con la parte terica puedes hacer ejercicios del tema:
Ejercicios Explicados de Dinmica:
Una persona est parada sobre una balanza ubicada sobre el piso de un ascensor que se mueve hacia arriba con
velocidad constante; en esas condiciones la balanza indica 80 kilos. Cul ser la indicacin de la balanza (en
kilogramos) cuando el ascensor comienza a frenar, para detenerse, con una aceleracin de 2 m/seg.
2
?
Solucin: Consideramos que el peso de la persona es 80 kilogramos ya que al moverse con
velocidad constante la sumatoria de fuerzas sobre el sistema hombre ascensor es nula; de esa
forma es lcito pensar que el peso (que es lo que marca la balanza) es contrarrestado por la
reaccin del piso (tercer principio de dinmica).
En el momento en que empieza a frenar el sistema, el cuerpo tiende a seguir en movimiento ya
que frena el ascensor pero no la persona (principio de inercia). La fuerza supuesta "impulsora"
del hombre est determinada por su masa y la aceleracin de frenado. Este fenmeno se
percibe en la balanza "pareciendo" que la persona "pesa" menos, siendo el valor que aparece
en el aparato la "resta" entre ambas fuerzas.
F
balanza
= P F
ac.
F
b
= P m a
c
F
b
= P
P
/
g
a
c
F
b
= 80 Kgf 16 Kgf = 64 Kgf.
P = m . g m =
P
/
g
Ejercicios de Dinmica.
24 de Febrero 2002
copyright 2002 Soko.com.ar es un sitio dedicado a difundir educacin
Trabajo Mecnico:
Autora: Silvia Sokolovsky
El trabajo mecnico es una magnitud escalar que depende del mdulo de una fuerza aplicada sobre un punto material y
el desplazamiento que esta le produce.
Tomemos una partcula de masa "m" la que se encuentra en reposo y
apliqumosle una fuerza exterior. Esta fuerza produce es una variacin
en la velocidad, una variacin en la cantidad de movimiento de la
partcula en funcin del tiempo.
Cada vez que se aplica una fuerza exterior sobre un cuerpo y este vara
su cantidad de movimiento en funcin del tiempo, este se desplaza. De
esta manera podemos buscar una relacin entre la fuerza aplicada y el
desplazamiento producido sin olvidarnos que son vectores.
Para que podamos entender mejor lo que sucede presupongamos que queremos detener un cuerpo que se halla en
movimiento. Presupongamos que al aplicar una fuerza de 10 N el cuerpo se desplaza 100 m hasta detenerse. Si
duplicamos la fuerza qu sucede con la distancia recorrida ?
Al aumentar al doble la fuerza el desplazamiento se reduce a la mitad por que la fuerza exterior aplicada y el
desplazamiento son inversamente proporcionales. Matemticamente implica que ambas magnitudes deben
multiplicarse. El producto escalar de ambos vectores se denomina "trabajo mecnico."
Mientras se realiza trabajo sobre el cuerpo, se produce una transferencia de energa al mismo, por lo que puede decirse
que el trabajo es energa en movimiento. Las unidades de trabajo son las mismas que las de energa.
La unidad de trabajo en el Sistema Internacional de Unidades es el julio (suele conocerse como Joulle), que se define
como el trabajo realizado por una fuerza de 1 newton a lo largo de un metro. El trabajo realizado por unidad de tiempo
se conoce comopotencia. La potencia correspondiente a un julio por segundo es un vatio (watt) " N. m = J "
Que sucede cuando el cuerpo se acelera debido a la fuerza aplicada?. Sencillamente sumamos los trabajos parciales, lo
que en la realidad no es muy sencillo si ambos varan con frecuencia. Para comprender mejor el procedimiento
grafiquemos la variacin de "F . cos a " respecto a "Dr ".
Podemos calcular el trabajo mecnico en estas condiciones tomando pequeas porciones de rea rectangular donde
la baseest representada por Dr (desplazamiento) y la altura corresponde a "f . cos a " (la proyeccin de la fuerza)
Como se ve en cada rectngulo posee un rea mayor, representado por , y un rea menor El valor del trabajo
correspondera aproximadamente a un valor intermedio entre ambas superficies.
La sumatoria de esta reas elementales nos dar el valor del trabajo mecnico.
El sumar reas elementales lleva implcito un proceso matemtico denominado "integracin". Si tomamos Dr cada vez
menor, tendiendo a cero (Dr 0) aplicando lmite tendremos:
.
De all que al ser el trabajo (L) la sumatoria de las reas elementales (A) tenemos que:
Energa Cintica: Al aplicar una fuerza exterior sobre un cuerpo, este se acelera. F = m . a (1)
La aceleracin produce variacin de velocidad: (2)
Al variar la velocidad la "cantidad" de espacio recorrido (Dx) en funcin del tiempo aumenta (si el movimiento es
acelerado) o disminuye (si es desacelerado) :
(3)
Si analizamos el trabajo mecnico (mximo) que realiza una fuerza sobre un cuerpo tendremos:
suplantamos por (1) L = m a Dx
suplantamos por (2) y por (3)
simplificamos Dt y multiplicamos (mediante distributivas) las velocidades
L = Esta expresin la denominaremos energa cintica
De esta manera se puede afirmar que si en el trabajo mecnico hay variacin de velocidad tambin habr variacin de
energa cintica: Teorema de la variacin de energa: L = D EC
En este teorema se expresa la relacin entre trabajo y energa, la energa se mide en la misma unidad.
Fuerzas Conservativas y no Conservativas: Imaginemos que tenemos un resorte de masa despreciable sujeto por uno de
sus extremos a una pared y un bloque de masa m; ambos en el piso de manera que si impulsamos al bloque, este se
dirigir hacia el resorte con una velocidad constante v (ya que para facilitar nuestro anlisis consideremos que la fuerza
de rozamiento entre el bloque y el piso es nula). As que la nica fuerza exterior que acta sobre el movimiento de este
cuerpo proviene del resorte.
A medida que el bloque va comprimiendo al resorte su velocidad (y energa cintica) disminuye hasta detenerse.
Aplicando la Ley de Hooke (F = k. Dx) podemos calcular la compresin que se
produce. Despus de esto el bloque invierte el sentido de su movimiento y, con igual
direccin, va ganando velocidad a medida que el resorte vuelve a su longitud original;
en ese momento el bloque tiene la misma velocidad (signo opuesto) que tena antes
de comprimir al resorte.
El bloque pierde energa cintica durante una parte de su movimiento pero la
recupera totalmente cuando regresa al punto de partida. Hay que recordar que la
variacin de la energa cintica indica que existe trabajo mecnico; es claro que, al
trmino de un viaje de ida y vuelta, la capacidad del bloque para hacer trabajo
permanece igual; ha sido conservada.
La fuerza elstica ejercida por el resorte ideal y otras fuerzas que se comportan de la
misma manera, se las denomina fuerzas conservativas.
La fuerza de gravedad es la tpica representante de las fuerzas conservativas ya que si lanzamos un objeto hacia arriba
(para el cual la resistencia del aire sea despreciable), regresa a nuestras manos con la misma energa cintica con la que
parti.
Sin embargo, si una partcula sobre la que actan una o ms fuerzas regresa a su posicin inicial con ms energa
cintica o con menos de la que tena inicialmente, resulta que en ese viaje de ida y vuelta su capacidad de producir
trabajo mecnico vara. Podemos suponer que al menos una de las fuerzas actuantes es no conservativa. La fuerza de
rozamiento es el tpico ejemplo de una fuerza no conservativa.
Resumiendo: Una fuerza es conservativa si el trabajo efectuado por ella (en el viaje de ida y vuelta) es cero. Una fuerza
es no conservativa si el trabajo efectuado por ella (en el viaje de ida y vuelta) es distinto de cero.
Energa Potencial: En nuestra experiencia cotidiana, al lanzar un objeto verticalmente hacia arriba, por ejemplo una
piedra, observamos que amedida que va subiendo su velocidad disminuye hasta llegar a ser nula (cero)
en el punto ms alto de su trayectoria.
Como el sistema tierra piedra es un sistema conservativo, la energa mecnica se mantiene constante
durante el ascenso.
Tomemos dos posiciones cualesquiera a diferente altitud, y1 ms bajo que y2. Si llamamos v1 a la
velocidad del objeto en la posicin y1 y v2 a la velocidad en y2 ; tenemos que v1 > v2 . Como la
energa cintica es directamente proporcional al cuadrado de la velocidad podemos indicar
que EC1 > EC 2.
Dijimos que el sistema es conservativo, entonces, dnde est la energa faltante?.
Existe un principio llamado "principio de conservacin de la energa" que nos indica que la energa no
se crea ni se destruye. Es evidente, entonces, que a medida que la energa cintica va
diminuyendo otra clase de energa tiene que aparecer para que la energa del sistema se mantenga
constante, a esa energa se la denomina energa de configuracin, ms conocida con el nombre de
energa potencial; designaremos a la energa potencial con la letra U.
De esta manera podemos afirmar que la energa mecnica en la posicin es y1 es EC1 + U y en la posicin y2 tenemos
queEC2 + + U =
Como el sistema es conservativo asumimos que:
EC1 + U = EC2 + U
Como v1 > v2 tenemos que DEC < 0. teniendo en cuenta que
adems DEC = L. DU = - L.
Recordemos que: .
El desplazamiento, lgicamente, ser la diferencia entre las dos posiciones:
La fuerza empleada depende de la masa del cuerpo y de la aceleracin de la gravedad, as que podemos utilizar: m . g =
P. Tenemos que la fuerza actuante sobre el cuerpo es su propio peso.
L p = P . Cos 180 (y2 y1) L P = - P. (y2 y1)
Como tenemos que DU = - L p y L p = - P. (y2 y1)
DU = - [- P.(y2 y1)]
DU = P. (y2 y1)
DU = P y2 P y1.
De esa manera podemos expresar a la energa potencial como: U = P . y (quizs no sea necesario pero aclaro que y es la
posicin vertical del cuerpo)
Suele designarse a la energa potencial tambin de la siguiente forma: E p.
Ejercicios
Ley de Gravitacin universal
Autora: Silvia Sokolovsky
La fuerza de atraccin gravitacional es la fuerza con que la Tierra nos atrae
hacia el suelo, es la culpable de que, al perder el equilibrio, nos vayamos de
bruces al piso. Podemos medirla sencillamente al pararnos en una balanza.
Esa extraa fuerza que retiene nuestros pies sobre la superficie no es otra cosa
que elpeso.
Hasta el siglo XVII la tendencia de un cuerpo a caer al suelo era considerada
como una propiedad inherente a todo cuerpo por lo que no necesitaba mayor
explicacin.
A primera vista parecera que el girar de los planetas alrededor del Sol y la cada de una manzana de un rbol poco
tienen en comn, sin embargo Isaac Newton intuy que se trataba de dos manifestaciones de un mismo fenmeno
fsico. A la edad de 23 aos, en un receso escolar debido a una epidemia desatada donde l estudiaba, se inspir al ver
caer una manzana desde un rbol a la tierra. Se le ocurri comparar la fuerza que atraa a la manzana y la que deba
atraer a la luna hacia la tierra; consider que las aceleraciones producidas por dichas fuerzas deberan tener un mismo
origen. La simple idea de que los movimientos celestes y terrestres estuvieran sujetos a leyes semejantes era un reto
temerario a romper la tradicin Aristotlica que imperaba en aquella poca.
La aceleracin de la manzana al caer ya la sabemos, es la aceleracin de la gravedad. As que a
c (m)
= g = 9,8 m/seg
2
Si la misma fuerza de atraccin que hace caer la manzana acta sobre la luna por qu no cae?. Simplemente por que
la luna gira produciendo una fuerza centrfuga que equipara a la fuerza de atraccin gravitacional.
La aceleracin de la luna puede ser calculada conociendo su perodo, y el radio de su rbita. Para tal fin consideremos
a su rbita como circular. La luna tarda 27,3 das (2,36.10
6
seg.) en dar una vuelta completa y se encuentra a 378000
Km. de distancia de la superficie de nuestro planeta, el radio de giro deber considerarse sumando el radio terrestre
(6360 Km. aproximadamente) y la distancia antes mencionada r = 3,85.10
8
m. Utilicemos las ecuaciones del
movimiento circular uniforme.
"a
c
= e
2
.r" y "e = 2t/
T
" "a
c
= (2t/
T
)
2
. r"
(suplantamos con los valores T = 2,36 . 10
6
seg. r = 3,85. 10
8
m)
a
c (L)
= (2t/
2,36.10
2
seg.
)
2
. 3,85 . 10
8
m = 2,722. 10
3
m/seg
2
.
Ahora que sabemos ambos valores comparemos la aceleracin de la manzana con la aceleracin de la luna.
Quiere decir que la aceleracin de la gravedad es 3600 veces mayor que la aceleracin que experimenta la luna.
Comparemos la relacin que hay entre los radios de rotacin de la luna y la manzana.
Quiere decir que el radio de giro de la luna es 60 veces mayor que el de la manzana.
Observando detenidamente vemos que 60
2
= 3600 (reemplazando tendremos)
Lo que indica que "la aceleracin es inversamente proporcional al cuadrado de la distancia".
a
c
. r
2
= Cte.
Basndonos en el segundo principio de dinmica "F = m . a
c
" podemos (despejando y a
c
y suplantando en la ecuacin
anterior) afirmar que "la fuerza es inversamente proporcional al cuadrado de la distancia y directamente
proporcional a la masa del cuerpo"
Tanto en el caso de la manzana como en el de la luna la masa de la tierra juega un papel importante, ya que la
interaccin de cada uno de estos cuerpos con nuestro planeta produce la
fuerza de atraccin.
Imaginemos dos mundos paralelos, en el primero encontramos a la Tierra
y a lamanzana, en el segundo, en vez de la fruta est nuestro satlite
natural exactamente en la misma posicin que la manzana de manera que
en ambos casos las distancias son iguales. El objetivo de este experimento
imaginario es conseguir la misma fuerza de atraccin para ambos casos;
para ello la masa de los dos cuerpos quedar fija mientras que la masa
terrestre podr variar segn nuestra voluntad.
Analicemos el sistema Tierra Luna (T L):
Si queremos lograr la misma fuerza de atraccin que en el sistema
manzana Tierra
(T m)
, la Tierra
(L T)
deber achicarse. La masa lunar obliga a disminuir la masa de nuestro planeta
Grado de libertad (fsica)
Para otros usos de este trmino, vase Grado de libertad.
El nmero de grados de libertad en un sistema fsico se refiere al nmero mnimo de nmeros reales
que es necesario especificar para determinar completamente el estado fsico. El concepto aparece
en mecnica clsica y en termodinmica.
En mecnica, por cada partcula libre del sistema y por cada direccin en la que sta es capaz de
moverse existen dos grados de libertad, uno relacionado con la posicin y el otro con la velocidad.
El nmero de grados de libertad de un sistema cuando existen ligaduras entre las partculas, ser el
nmero total de variables, menos el nmero de ligaduras que las relacionan.
Obsrvese que esta definicin no coincide ni con la definicin de grados de libertad que se usa en
ingeniera de mquinas, ni con la que se usa en ingeniera estructural.
Contenido
[ocultar]
- 1 Grados de libertad en mecnica clsica
o 1.1 Ejemplos
- 2 Grados de libertad en mecnica estadstica
o 2.1 Teorema de equiparticin de la energa
- 3 Vase tambin
[editar]Grados de libertad en mecnica
clsica
En mecnica hamiltoniana el nmero de grados de libertad de un sistema coincide con la dimensin
topolgica del espacio de fases del sistema. En mecnica lagrangiana el nmero de grados de libertad
coincide la dimensin del fibrado tangente del espacio de configuracin del sistema.
Un conjunto de N partculas intereactuantes pero movindose sin restricciones en el espacio
tridimensional tiene 6N grados de libertad (tres coordenadas de posicin y tres velocidades). Si el
conjunto de partculas se mueve sobre un estado d-dimensional el nmero de grados de libertad es
2dN.
Si existen k ligaduras entre las partculas el nmero de grados de libertad ser
[editar]Ejemplos
Partcula libre
Una sola partcula libre tiene 6 grados de libertad
Partcula obligada a moverse sobre una superficie
La superficie supone una ligadura para las posiciones, ya que debe cumplirse
y otra para las velocidades, ya que la velocidad debe ser en todo momento tangente a la
superficie, por lo que
por tanto el nmero de grados de libertad es
valor que coincide con lo que se espera para un movimiento en una variedad
bidimensional.
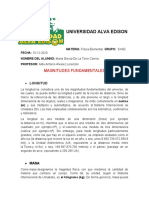
Ejemplo: Diferentes formas de visualizar los 3 grados de
libertad de una molcula diatmica en forma de pesa.
(CM: centro de masas del sistema, T: movimiento
traslacional, R: movimiento rotacional, V: movimiento
vibracional.)
Dos partculas en los extremos de una varilla
Por tener dos partculas tenemos 12 grados de libertad, pero la condicin de que
la distancia entre las partculas sea fijada supone una ligadura para sus
posiciones y otra para sus velocidades, lo que nos da
Estos grados de libertad se pueden representar por variables diferentes (las
tres coordenadas del centro de la varilla y los dos ngulos que dan la
orientacin de sta, con sus correspondientes velocidades).
Un slido rgido
Un slido formado por N partculas posee en principio 6N variables. Pero el
nmero de ligaduras es:
Para la primera partcula, ninguna
Para la segunda partcula, 2 (la distancia a la primera y su
velocidad, como en el caso de dos partculas unidas por una varilla)
Para la tercera partcula, 4 (las distancias a las dos primeras
partculas y sus correspondientes velocidades)
Para la cuarta y siguientes, 6, ya que una vez dada la distancia a
tres partculas, la distancia a todas las dems est tambin fijada).
Por tanto el nmero de grados de libertad es
que se pueden representar por seis variables (la posicin del centro
de masa y los ngulos de Euler) y sus correspondientes velocidades.
En general, no todas las ligaduras pueden representarse mediante
una reduccin en el nmero de variables (aunque s en el nmero de
variables independientes). Cuando tenemos un sistema en el cual las
ligaduras no son integrables, se dice que el sistema es no holnomo.
Es importante sealar que la convencin para contabilizar los grados
de libertad en ingeniera mecnica es diferente, siendo justamente la
mitad que en los casos (1) y (2).
[editar]Grados de libertad en
mecnica estadstica
[editar]Teorema de
equiparticin de la energa
Artculo principal: Teorema de equiparticin
En el lmite clsico de la mecnica estadstica la energa de un
sistema en equilibrio trmico con n grados de libertad cuadrticos e
independientes es:
Donde:
es la constante de Boltzmann
es la temperatura
es el nmero de grados de libertad del sistema
Grado de libertad (ingeniera)
Para otros usos de este trmino, vase Grados de libertad.
El nmero de grados de libertad en ingeniera se refiere al nmero mnimo de parmetros que
necesitamos especificar para determinar completamente la velocidad de un mecanismo o el nmero de
reacciones de una estructura.
Contenido
[ocultar]
- 1 Grados de libertad en mecanismos
o 1.1 Definicin
o 1.2 Grados de libertad en mecanismos planos
- 2 Grados de libertad en estructuras
- 3 Vase tambin
[editar]Grados de libertad en mecanismos
Un cuerpo aislado puede desplazarse libremente en un movimiento que se puede descomponer en
3 rotaciones y 3 traslaciones geomtricas independientes (traslaciones y rotaciones respecto de ejes
fijos en las 3 direcciones de una base referida a nuestro espacio de tres dimensiones).
Para un cuerpo unido mecnicamente a otros cuerpos (mediante pares cinemticos), algunos de estos
movimientos elementales desaparecen. Se conocen como grados de libertad los movimientos
independientes que permanecen.
[editar]Definicin
Ms concretamente, los grados de libertad son el nmero mnimo de velocidades
generalizadas independientes necesarias para definir el estado cinemtico de un mecanismo o sistema
mecnico. El nmero de grados de libertad coincide con el nmero de ecuaciones necesarias para
describir el movimiento. En caso de ser un sistema holnomo, coinciden los grados de libertad con
las coordenadas independientes.
En mecnica clsica y lagrangiana, la dimensin d del espacio de configuracin es igual a dos veces el
nmero de grados de libertad GL, d = 2GL.
[editar]Grados de libertad en mecanismos
planos
Para un mecanismo plano cuyo movimiento tiene lugar slo en dos dimensiones, el nmero de grados
de libertad del mismo se pueden calcular mediante el criterio de Grbler-Kutzbach:
donde:
m,, movilidad.
, nmero de elementos (eslabones, barras, piezas, etc.) de un mecanismo.
, nmero de uniones de 1 grado de libertad.
, nmero de uniones de 2 grados de libertad.
Importante: esta frmula es vlida slo en el caso de que no existan enlaces
redundantes, es decir enlaces que aparecen fsicamente en el mecanismo pero
no son necesarios para el movimiento de ste. Para poder emplear el criterio,
debemos eliminar los enlaces redundantes y calcular entonces los grados de
libertad del mecanismo.
Todas las partes fijas (uniones al suelo) se engloban como el primer elemento.
Aunque el grado de libertad de algunas uniones es fcil de visualizar, en otras
ocasiones se pueden cambiar por sistemas equivalentes.
[editar]Grados de libertad en
estructuras
Podemos extender la definicin de grados de libertad a sistemas mecnicos que
no tienen capacidad de moverse, llamados estructuras fijas. En el caso
particular de estructuras de barras en d dimensiones, si n es el nmero de barras
y existen m restricciones (uniones entre barras o apoyos) que eliminan cada
una r
i
grados de libertad de movimiento; definimos el nmero de grados de
libertad aparentes como:
GL: Grados de libertad del mecanismo.
n: Nmero de elementos de barras de la estructura.
r
i
: Nmero de grados de libertad eliminados por la restriccin .
En funcin de la anterior suma algebraica podemos hacer una clasificacin de los
sistemas mecnicos formados a base de barras:
Estructuras hiperestticas, cuando GL < 0.
Estructuras isostticas, cuando GL = 0.
Mecanismos, cuando GL > 0.
Diagrama de cuerpo libre
Bloque sobre un plano inclinado(arriba) y diagrama de cuerpo libre de
ese mismo bloque (abajo).
Un diagrama de cuerpo libre es una representacin grfica utilizada a menudo por fsicos e ingenieros
para analizar las fuerzas que actan sobre un cuerpo libre. El diagrama de cuerpo libre es un elemental
caso particular de un diagrama de fuerzas. En espaol, se utiliza muy a menudo la
expresin diagrama de fuerzas como equivalente a diagrama de cuerpo libre, aunque lo correcto
sera hablar de diagrama de fuerzas sobre un cuerpo libre o diagrama de fuerzas de sistema
aislado. Estos diagramas son una herramienta para descubrir las fuerzas desconocidas que aparecen
en las ecuaciones del movimiento del cuerpo. El diagrama facilita la identificacin de
las fuerzas y momentos que deben tenerse en cuenta para la resolucin del problema. Tambin se
emplean para el anlisis de las fuerzas internas que actan en estructuras.
1
2
Contenido
[ocultar]
- 1 Elaboracin
o 1.1 Fuerzas internas desarrolladas en elementos estructurales
o 1.2 Lo que hay que incluir
o 1.3 Lo que no hay que incluir
o 1.4 Suposiciones
- 2 Ejemplo
- 3 Vase tambin
- 4 Referencias
[editar]Elaboracin
Un esquema del cuerpo en cuestin y de las fuerzas que actan sobre l representadas como vectores.
La eleccin del cuerpo es la primera decisin importante en la solucin del problema. Por ejemplo, para
encontrar las fuerzas que actan sobre una bisagra o un alicate,es mejor analizar solo una de las dos
partes, en lugar del sistema entero, representando la segunda mitad por las fuerzas que ejerce sobre la
primera.
[editar]Fuerzas internas desarrolladas en
elementos estructurales
Para disear un elemento estructural o mecnico es necesario conocer la carga que acta dentro de l
para asegurarnos de que el material puede resistir esta carga. Las cargas internas pueden determinarse
por el mtodo de secciones, seccionando o cortando imaginariamente una seccin perpendicular al eje
de la viga. Las cargas internas que actan sobre el elemento quedarn expuestas y se
volvern externas en el diagrama de cuerpo libre de cada segmento.
Los componentes de la fuerza (N) que acta en perpendicular a la seccin transversal se
denomina fuerza Normal.
Los componentes de la fuerza (V) que es tangente a la seccin transversal se llama fuerza cortante.
El momento de par (M) se conoce como momento flector.
3
[editar]Lo que hay que incluir
El esquema del cuerpo debe llegar solo al nivel de detalle necesario. Un simple esbozo puede ser
suficiente y en ocasiones, dependiendo del anlisis que se quiera realizar, puede bastar con un punto.
Todos las fuerzas externas se representan mediante vectores etiquetados de forma adecuada. Las
flechas indican la direccin y magnitud de las fuerzas y, en la medida de lo posible, deberan situarse en
el punto en que se aplican.
Solo se deben incluir las fuerzas que actan sobre el objeto, ya sean
de rozamiento, gravitatorias, normales, de arrastre o de contacto. Cuando se trabaja con un sistema de
referencia no inercial, es apropiado incluir fuerzas ficticias como la centrfuga.
Se suele trabajar con el sistema de coordenadas ms conveniente, para simplificar las ecuaciones. La
direccin del eje x puede hacerse coincidir con la direccin de descenso de un plano inclinado, por
ejemplo, y as la fuerza de rozamiento slo tiene componente en esa coordenada, mientras que la
normal sigue el eje y. La fuerza gravitatoria, en este caso , tendr componentes segn los dos
ejes, en el x y en el y, donde es el ngulo que forma el plano con la
superficie horizontal.
[editar]Lo que no hay que incluir
Las fuerzas que el cuerpo ejerce sobre otros cuerpos. Por ejemplo, si una pelota permanece en reposo
sobre una mesa, la pelota ejerce una fuerza sobre sta, pero en el diagrama de cuerpo libre de la
primera solo hay que incluir la fuerza que la mesa ejerce sobre ella.
Tambin se excluyen las fuerzas internas, las que hacen que el cuerpo sea tratado como un nico
slido. Por ejemplo, si se analiza las fuerzas que aparecen en los soportes de unaestructura mecnica
compleja, como el tablero de un puente, las fuerzas internas de las distintas partes que lo forman no se
tienen en cuenta.
[editar]Suposiciones
El diagrama de cuerpo libre refleja todas las suposiciones y simplificaciones que se han hecho para
analizar el problema. Si el cuerpo en cuestin es un satlite en rbita y lo nico que se desea es
encontrar su velocidad, un punto puede ser la mejor opcin. Los vectores deben colocarse y etiquetarse
con cuidado para evitar suposiciones que condicionen el resultado. En el diagrama ejemplo de esta
entrada, la situacin exacta de la fuerza normal resultante que la rampa ejerce sobre el bloque solo
puede encontrarse despus de analizar el movimiento o de asumir que se encuentra en equilibrio.
[editar]Ejemplo
El diagrama de cuerpo libre del bloque sobre el plano inclinado es una aplicacin sencilla de estos
principios:
Todos los soportes y estructuras se han sustituido por las fuerzas que ejercen sobre el bloque:
mg: peso del bloque.
N: Fuerza normal del plano sobre el bloque.
F
f
: fuerza de rozamiento entre el bloque y el plano.
Los vectores muestran la direccin y el punto de aplicacin.
Se acompaa del sistema de referencia que se ha usado para describir los vectores.
[editar]Vase tambin
Wikimedia Commons alberga contenido multimedia sobre Diagrama de cuerpo libre.
Mecnica clsica
Fuerzas fundamentales
[editar]Referencias
1. Ruina, Andy; Rudra Pratap (2002) (PDF). Introduction
to Statics and Dynamics. Oxford University Press.
pp. 79105. Consultado el 04-08-2006.
2. Hibbeler, R. C. (2007). Engineering Mechanics: Statics
& Dynamics (Eleventh Edition edicin). Pearson Prentice
Hall. pp. 8386. ISBN 0-13-22150-4.
3. Hibbeler, R. C. (2010). Ingeniera mecnica-Esttica
(12edicin). Pearson Prentice Hall
Potrebbero piacerti anche
- Manual Curso PrecontratoDocumento34 pagineManual Curso PrecontratoPiera LizamaNessuna valutazione finora
- Evaluacion # 4 FinalDocumento23 pagineEvaluacion # 4 FinalSaul RuvalcabaNessuna valutazione finora
- Campo Gravitatorio Fisica 2 BachDocumento6 pagineCampo Gravitatorio Fisica 2 BachMaria Del Carmen DelgadoNessuna valutazione finora
- INFORME Trabajo Energia y PotenciaDocumento21 pagineINFORME Trabajo Energia y Potenciaalex38% (8)
- Superficies EquiponencialesDocumento30 pagineSuperficies EquiponencialesMichkell Luis ramirez100% (1)
- S13 S2-MaterialDocumento17 pagineS13 S2-MaterialAaronNessuna valutazione finora
- Eduardo - Farías - 1ra LeyDocumento13 pagineEduardo - Farías - 1ra Leyeduardo fariasNessuna valutazione finora
- Temario UPCH 2023-23Documento9 pagineTemario UPCH 2023-23Miguel Estudiando :VNessuna valutazione finora
- Temario Ciencias Naturales Grado NovenoDocumento3 pagineTemario Ciencias Naturales Grado NovenoAlonsoNessuna valutazione finora
- Eficiencia y Curvas de ExpansionDocumento16 pagineEficiencia y Curvas de ExpansionBrandon OsunaNessuna valutazione finora
- Termodinamica ManriqueDocumento58 pagineTermodinamica ManriqueAnthony Otazú Ramos0% (1)
- Trabajo MecánicoDocumento3 pagineTrabajo MecánicoMEK 14Nessuna valutazione finora
- TermodinámicaDocumento110 pagineTermodinámicagerssonNessuna valutazione finora
- Fisica II Part 4Documento72 pagineFisica II Part 4Laura Andrea ZamoraNessuna valutazione finora
- Modulo IV Bimestrefisica 4 AñoDocumento18 pagineModulo IV Bimestrefisica 4 AñoSandra Estefany Ahon CalongeNessuna valutazione finora
- Ecuaciones Masa Energia Cantidad Movimiento 2020Documento28 pagineEcuaciones Masa Energia Cantidad Movimiento 2020Victor MoraNessuna valutazione finora
- Trabajo-1 FisicaDocumento23 pagineTrabajo-1 FisicaMalenny Toledo RafaeleNessuna valutazione finora
- Fisica IDocumento51 pagineFisica IPe Angel100% (21)
- El Trabajo, Energía y Potencia - Elementos de Física en El Trabajo Mecánico - WebscolarDocumento15 pagineEl Trabajo, Energía y Potencia - Elementos de Física en El Trabajo Mecánico - WebscolarAngelopolis ReyesNessuna valutazione finora
- Toberas y DifusoresDocumento9 pagineToberas y DifusoresMaria Alexandra Cortesia Baldan100% (1)
- Examen Del Cuarto Parcial Del Curso de Mecanica ClasicaDocumento2 pagineExamen Del Cuarto Parcial Del Curso de Mecanica ClasicamacalmexNessuna valutazione finora
- Fisica I 68901016 PDFDocumento8 pagineFisica I 68901016 PDFParadescargar DescargaNessuna valutazione finora
- Energia Mecanica Puntaje NacionalDocumento4 pagineEnergia Mecanica Puntaje NacionalCACAKKNessuna valutazione finora
- Laboratorio Fisica Trabajo y PotenciaDocumento14 pagineLaboratorio Fisica Trabajo y PotenciaAlexander CastroNessuna valutazione finora
- Campo Electrico Ley de Gauss Practica Jaula de Faraday PDFDocumento30 pagineCampo Electrico Ley de Gauss Practica Jaula de Faraday PDFYudy Viviana Morales PayanNessuna valutazione finora
- Cap 13 SOLUCIONDocumento44 pagineCap 13 SOLUCIONDaNteNessuna valutazione finora
- Tema5 Trabajoenergía PDFDocumento29 pagineTema5 Trabajoenergía PDFRonald VelascoNessuna valutazione finora
- FisicaDocumento7 pagineFisicaManuel García del ÁguilaNessuna valutazione finora
- Fisica Tarea 1Documento12 pagineFisica Tarea 1grecia de la torreNessuna valutazione finora
- Presentacion - Unidad 2. Primera Ley de La TermodinámicaDocumento121 paginePresentacion - Unidad 2. Primera Ley de La TermodinámicaDiaz Zapata Juan AngelNessuna valutazione finora