Potrebbero piacerti anche
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (894)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- 31a GuideDocumento3 pagine31a Guideeuishinkim0103Nessuna valutazione finora
- 2013 Admiralty Secondary School Mid-Year Maths Exam Marking SchemeDocumento7 pagine2013 Admiralty Secondary School Mid-Year Maths Exam Marking Schemetoh tim lamNessuna valutazione finora
- Chapter 1 - Linear RelationsDocumento84 pagineChapter 1 - Linear RelationsYash100% (1)
- Hyperbolic Equation - Google SearchDocumento2 pagineHyperbolic Equation - Google SearchMike ShufflebottomNessuna valutazione finora
- Mathematical Notation and Functions in Machine LearningDocumento132 pagineMathematical Notation and Functions in Machine LearningDominik SchmidtNessuna valutazione finora
- Real Time System by Jane W. S. Liu Chapter 5.1 (A) (B) SolutionDocumento4 pagineReal Time System by Jane W. S. Liu Chapter 5.1 (A) (B) Solutionarun100% (1)
- Signals and Systems Notes (Midterm)Documento20 pagineSignals and Systems Notes (Midterm)abdhatemshNessuna valutazione finora
- Linear Programming Geometry: Graphical Approach to Solving LP ProblemsDocumento39 pagineLinear Programming Geometry: Graphical Approach to Solving LP ProblemsCristel ObraNessuna valutazione finora
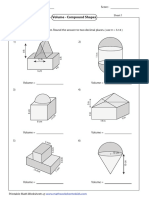
- Compound Shapes AllDocumento6 pagineCompound Shapes AllNour El Dien MNessuna valutazione finora
- Integration (Basic Integration)Documento6 pagineIntegration (Basic Integration)Fazlina MustafaNessuna valutazione finora
- On The Eigenvalues of Zero-Divisor Graph Associated To Finite Commutative RingDocumento7 pagineOn The Eigenvalues of Zero-Divisor Graph Associated To Finite Commutative RingG. ArunkumarNessuna valutazione finora
- Encyclopaedia of Mathematical SciencesDocumento341 pagineEncyclopaedia of Mathematical SciencesÁron Kovács100% (1)
- Matrix Algebra For Engineers: Jeffrey R. ChasnovDocumento143 pagineMatrix Algebra For Engineers: Jeffrey R. ChasnovWaqar Ali SoomroNessuna valutazione finora
- DSP01Documento14 pagineDSP01Shaista NazNessuna valutazione finora
- Random Graph Concentration and Community DetectionDocumento20 pagineRandom Graph Concentration and Community DetectionPaulo Ney de SouzaNessuna valutazione finora
- Complex number and vector algebra questionsDocumento3 pagineComplex number and vector algebra questionsKang Chia UiNessuna valutazione finora
- NEG11MathPTPaper 12 06 10Documento12 pagineNEG11MathPTPaper 12 06 10Rosemarie Velasco DalupangNessuna valutazione finora
- Student assignment on linear systemsDocumento4 pagineStudent assignment on linear systemsDan W100% (1)
- 2024 B7 End of Term 1 Exams Mathematics 2 SolutionDocumento5 pagine2024 B7 End of Term 1 Exams Mathematics 2 SolutionAblerh Paul LawerhNessuna valutazione finora
- Illustrating Quadratic EquationsDocumento11 pagineIllustrating Quadratic EquationsMariel PenafloridaNessuna valutazione finora
- II Puc Maths MCQ (Part - A)Documento44 pagineII Puc Maths MCQ (Part - A)Vansh GuptaNessuna valutazione finora
- 5.1.number Systems and Digital Cercuits - Topic 5 ..BitsDocumento30 pagine5.1.number Systems and Digital Cercuits - Topic 5 ..Bitsshaik ahammad hussainNessuna valutazione finora
- MathBohem 121-1996-2 12Documento20 pagineMathBohem 121-1996-2 12Valentin MotocNessuna valutazione finora
- The minor of an entry in a square matrix A is the determinant of the submatrix obtained by removing the row and column containing that entry. So the correct option is "removedDocumento75 pagineThe minor of an entry in a square matrix A is the determinant of the submatrix obtained by removing the row and column containing that entry. So the correct option is "removedMoonNessuna valutazione finora
- Gmat QuantDocumento119 pagineGmat Quantabhishek pathak100% (1)
- Chapter 3 Graph Theory PDFDocumento17 pagineChapter 3 Graph Theory PDFBran InocencioNessuna valutazione finora
- Fourier Transform of Periodic SignalsDocumento55 pagineFourier Transform of Periodic SignalsShiju RamachandranNessuna valutazione finora
- TU Delft - Undergrad Application and Test BrochureDocumento11 pagineTU Delft - Undergrad Application and Test BrochureNEOGEN HYDNessuna valutazione finora
- MTAP-DepEd Saturday Program in Mathematics Grade 2 Session 1 Place ValueDocumento2 pagineMTAP-DepEd Saturday Program in Mathematics Grade 2 Session 1 Place ValueLuis SalengaNessuna valutazione finora
- The Quadratic FormulaDocumento14 pagineThe Quadratic FormulaAnie jane BentoyNessuna valutazione finora