Potrebbero piacerti anche
- Draft Concept Note On Goat RearingDocumento7 pagineDraft Concept Note On Goat Rearinganoop_100% (1)
- Walking Machines: An Introduction To Legged RobotsDocumento183 pagineWalking Machines: An Introduction To Legged Robotsadina crisanNessuna valutazione finora
- Snake Robot ProjectDocumento41 pagineSnake Robot ProjectNikhil SinghNessuna valutazione finora
- Industrial Robotics AssignmentDocumento3 pagineIndustrial Robotics Assignmentpikaboo1Nessuna valutazione finora
- UVic Hexapod 2012Documento31 pagineUVic Hexapod 2012tamiya0404Nessuna valutazione finora
- Advanced Sentence Correction For GMAT SCDocumento27 pagineAdvanced Sentence Correction For GMAT SCharshv3Nessuna valutazione finora
- Wildlife Fact File - Birds - 11-20Documento20 pagineWildlife Fact File - Birds - 11-20ClearMind84Nessuna valutazione finora
- Describing FoodDocumento4 pagineDescribing FoodJohn SmithNessuna valutazione finora
- 6 Leg Kinematic Walker Robot With ManupilatorDocumento18 pagine6 Leg Kinematic Walker Robot With ManupilatorDhiraj ShindeNessuna valutazione finora
- Six Leg RobotDocumento13 pagineSix Leg Robotramesh2184Nessuna valutazione finora
- Walking Trajectory Control of A Biped RobotDocumento18 pagineWalking Trajectory Control of A Biped RobotBogdan PopNessuna valutazione finora
- ROBOTDocumento29 pagineROBOTkuldeepNessuna valutazione finora
- Project Report Hexapod RobotDocumento3 pagineProject Report Hexapod RobotJunaid JahangirNessuna valutazione finora
- Wheel Leg 2011-224Documento8 pagineWheel Leg 2011-224idorofte8235Nessuna valutazione finora
- Humanoid RobotsDocumento17 pagineHumanoid RobotsPaul JacksonNessuna valutazione finora
- Six Legged Robot For Agricultural Purpose Which Can Seed and Spray The WaterDocumento5 pagineSix Legged Robot For Agricultural Purpose Which Can Seed and Spray The WaterAbrar MuhammedNessuna valutazione finora
- Biped Robots SummaryDocumento19 pagineBiped Robots Summarysunbo100% (1)
- Humanoid RobotDocumento16 pagineHumanoid RobotShubham PundirNessuna valutazione finora
- Robotics in ManufacturingDocumento8 pagineRobotics in ManufacturingJadelyn MangondatoNessuna valutazione finora
- Quadruped Walking Running SimulationDocumento49 pagineQuadruped Walking Running SimulationbilynbkNessuna valutazione finora
- Research Areas For Mechatronics EngineeringDocumento2 pagineResearch Areas For Mechatronics EngineeringRohithGiridharan100% (1)
- 2013 Robotics RoadmapDocumento137 pagine2013 Robotics RoadmapRoberto OliverioNessuna valutazione finora
- Multibody System Simulation With SimmechanicsDocumento24 pagineMultibody System Simulation With SimmechanicsSonny Jason ANessuna valutazione finora
- Robotics NotesDocumento22 pagineRobotics NotesUpendra020% (1)
- Information and Program: Robotics 1Documento13 pagineInformation and Program: Robotics 1Bharath KumarNessuna valutazione finora
- Walking-Beam Conveyors Allow Multiple Processes: by Murali ShivamuthulingamDocumento2 pagineWalking-Beam Conveyors Allow Multiple Processes: by Murali ShivamuthulingamSamik MukherjeeNessuna valutazione finora
- r05320305 Design of Machine Members IIDocumento11 paginer05320305 Design of Machine Members IISrinivasa Rao G100% (4)
- Advanced Robotics SlidesDocumento29 pagineAdvanced Robotics Slidesنام منNessuna valutazione finora
- Robotics Unit-5 Question BankDocumento6 pagineRobotics Unit-5 Question BankveerapandianNessuna valutazione finora
- Unit - I Lecture Notes PDFDocumento12 pagineUnit - I Lecture Notes PDFCody LeeNessuna valutazione finora
- Fabrication & Controling of A Manipulator With Specific Coloured Object DetectionDocumento18 pagineFabrication & Controling of A Manipulator With Specific Coloured Object DetectionTusher Saha50% (8)
- ROBOTICSQUESTION BANK Unit V, Vi, Vii, Viii by Mahendra Babu Mekala, PBRVITS, KavaliDocumento10 pagineROBOTICSQUESTION BANK Unit V, Vi, Vii, Viii by Mahendra Babu Mekala, PBRVITS, KavaliMahendra Babu Mekala100% (2)
- Universal Soft Pneumatic Robotic Gripper With Variable Effective LengthDocumento6 pagineUniversal Soft Pneumatic Robotic Gripper With Variable Effective Lengthflv_91Nessuna valutazione finora
- Chapter 1 PM CM SMDocumento67 pagineChapter 1 PM CM SMZulhelmi MansorNessuna valutazione finora
- Dynamic Mobile Robot Paper 1Documento6 pagineDynamic Mobile Robot Paper 1pgamasterNessuna valutazione finora
- The Kinematics Model of A Two-Wheeled Self-Balancing RobotDocumento5 pagineThe Kinematics Model of A Two-Wheeled Self-Balancing RobotJason ArensNessuna valutazione finora
- Presentation On Robot Path PlanningDocumento12 paginePresentation On Robot Path PlanningdineshNessuna valutazione finora
- Robot Motion Planning: Approaches and Research IssuesDocumento26 pagineRobot Motion Planning: Approaches and Research IssuesRahul KalaNessuna valutazione finora
- A New 6-DOF Parallel Robot With Simple Kinematic Model: Nicholas Seward, Ilian A. Bonev, Senior Member, IEEEDocumento6 pagineA New 6-DOF Parallel Robot With Simple Kinematic Model: Nicholas Seward, Ilian A. Bonev, Senior Member, IEEEAhmedSeragNessuna valutazione finora
- Self Healing Robots - Seminar ReportDocumento33 pagineSelf Healing Robots - Seminar ReportVishnu Ravindran60% (10)
- Modelling and Simulation of 6 DOF Motion Simulator For Underwater Research ApplicationsDocumento1 paginaModelling and Simulation of 6 DOF Motion Simulator For Underwater Research Applicationsvikram banthiaNessuna valutazione finora
- Basu-Fem Notes Me623Documento210 pagineBasu-Fem Notes Me623Subhradeep ChatterjeeNessuna valutazione finora
- Chapter 2 SolutionDocumento4 pagineChapter 2 SolutionEngr ShabirNessuna valutazione finora
- DesignreviewiipaperDocumento26 pagineDesignreviewiipaperapi-314103080Nessuna valutazione finora
- FFR125 LectureNotesDocumento122 pagineFFR125 LectureNotesshivaprasadmvit100% (1)
- HexapodDocumento106 pagineHexapodmathematica1234Nessuna valutazione finora
- Trajectory Tracking For SCARA Robots With Compliant Transmissions: A Technique To Improve The Positioning PrecisionDocumento3 pagineTrajectory Tracking For SCARA Robots With Compliant Transmissions: A Technique To Improve The Positioning PrecisionChandan KanuNessuna valutazione finora
- Seminar On: RoboticsDocumento25 pagineSeminar On: RoboticsvivekNessuna valutazione finora
- FSeriesDocumento8 pagineFSeriesridwanjayNessuna valutazione finora
- L9 - Trajectory Planning - 1 V1Documento15 pagineL9 - Trajectory Planning - 1 V1zul_fadhli_1988Nessuna valutazione finora
- Self Healing RobotsDocumento23 pagineSelf Healing Robots1da09ec064Nessuna valutazione finora
- Chairless ChairDocumento14 pagineChairless ChairShubham Gujar100% (1)
- Forward and Reverse KinematicsDocumento3 pagineForward and Reverse KinematicsNeha SharmaNessuna valutazione finora
- STS121 M3L3 - Automation and RoboticsDocumento8 pagineSTS121 M3L3 - Automation and RoboticsJusteene SaysonNessuna valutazione finora
- Kavita Singh Cs-A 0509710047Documento37 pagineKavita Singh Cs-A 0509710047kavita8642100% (2)
- Inverse Kinematic Control of A Prosthetic ArmDocumento26 pagineInverse Kinematic Control of A Prosthetic Armodsnet100% (1)
- Space Robotics Seminar ReportDocumento31 pagineSpace Robotics Seminar ReportVinayak PaneriNessuna valutazione finora
- 9A03502 Dynamics of MachineryDocumento4 pagine9A03502 Dynamics of MachinerysivabharathamurthyNessuna valutazione finora
- Position Control and Trajectory Tracking of The Stewart PlatformDocumento27 paginePosition Control and Trajectory Tracking of The Stewart PlatformGunjan KhutNessuna valutazione finora
- Automated Vehicles A Complete Guide - 2020 EditionDa EverandAutomated Vehicles A Complete Guide - 2020 EditionNessuna valutazione finora
- Design of A Hybrid WheelDocumento8 pagineDesign of A Hybrid WheelAdnan ZafarNessuna valutazione finora
- Human-Oriented Biped Robot Design: Insights Into The Development of A Truly Anthropomorphic LegDocumento6 pagineHuman-Oriented Biped Robot Design: Insights Into The Development of A Truly Anthropomorphic Legvkumar1987Nessuna valutazione finora
- HAWASSA UNIVERSITY - Docx MechanisemDocumento7 pagineHAWASSA UNIVERSITY - Docx Mechanisembetelhemterefe wondimagenihuNessuna valutazione finora
- Applied Sciences: Special Feature On Bio-Inspired RoboticsDocumento7 pagineApplied Sciences: Special Feature On Bio-Inspired RoboticsJHON LEWIS LORA CHINCHIANessuna valutazione finora
- Ficha 3º,4º,5º Sec 25-06Documento2 pagineFicha 3º,4º,5º Sec 25-06JeamPierre ReyesNessuna valutazione finora
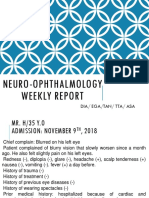
- Case Report CMV RetinitisDocumento27 pagineCase Report CMV RetinitistaniamaulaniNessuna valutazione finora
- THBT Animal Testing Should Be BannedDocumento3 pagineTHBT Animal Testing Should Be BannedFabio RizalNessuna valutazione finora
- 1933 ConventionDocumento4 pagine1933 Conventionapi-301726216Nessuna valutazione finora
- Bedroom TitanDocumento70 pagineBedroom TitanCamillo Granata100% (3)
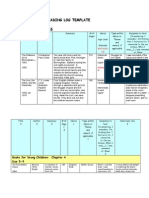
- Annotated Reading LogDocumento13 pagineAnnotated Reading LoggaureliNessuna valutazione finora
- British Expression DictionaryDocumento143 pagineBritish Expression DictionarySantoshNessuna valutazione finora
- ITC HS Export Policy 2018 PDFDocumento392 pagineITC HS Export Policy 2018 PDFSachin AhujaNessuna valutazione finora
- Rubric For Creating A 3 D Model For The Plant and Animal CellsDocumento1 paginaRubric For Creating A 3 D Model For The Plant and Animal Cellsnosheen afzalNessuna valutazione finora
- Fate of The Embryonic Germ LayersDocumento3 pagineFate of The Embryonic Germ Layersmalav1989Nessuna valutazione finora
- Reading Paper Complete Set For Form 1 30102022Documento9 pagineReading Paper Complete Set For Form 1 30102022kuaryana syafiqahNessuna valutazione finora
- RTL Critical Thinking Skills e LearningDocumento50 pagineRTL Critical Thinking Skills e LearningElías Tamez100% (1)
- The Thickety by J.A. White ExcerptDocumento79 pagineThe Thickety by J.A. White ExcerptHarperCollins Childrens BooksNessuna valutazione finora
- Ajara-Rasayana KSRPrasadDocumento56 pagineAjara-Rasayana KSRPrasadksr prasad100% (1)
- Acute-Phase Protein - WikipediaDocumento4 pagineAcute-Phase Protein - WikipediaZACHARIAH MANKIRNessuna valutazione finora
- Pest Control Services - ISSHIcareDocumento11 paginePest Control Services - ISSHIcarepromos10Nessuna valutazione finora
- 1 Meat Product List PDFDocumento2 pagine1 Meat Product List PDFdaiannezipaganNessuna valutazione finora
- Bird Imagery in Portrait of The Artist As A Young ManDocumento2 pagineBird Imagery in Portrait of The Artist As A Young ManProfadeengleza8Nessuna valutazione finora
- Link To Publication in University of Groningen/UMCG Research DatabaseDocumento54 pagineLink To Publication in University of Groningen/UMCG Research DatabaseSrood TalibNessuna valutazione finora
- SSC MTS Sen ImpDocumento7 pagineSSC MTS Sen ImpNaveen KasiNessuna valutazione finora
- External Disease and CorneaDocumento105 pagineExternal Disease and CorneaNova CiNg CiNgNessuna valutazione finora
- Proper Posture and AlignmentDocumento3 pagineProper Posture and Alignmentschorleworle100% (1)
- Connect (4) New QuestionDocumento18 pagineConnect (4) New QuestionGeorge ElsabaNessuna valutazione finora
- The Use and Non-Use of Articles: From The Purdue University Online Writing Lab, Http://owl - English.purdue - EduDocumento2 pagineThe Use and Non-Use of Articles: From The Purdue University Online Writing Lab, Http://owl - English.purdue - EduprasanthaNessuna valutazione finora
- GrammarDocumento12 pagineGrammarMuhamad Zaini MasryNessuna valutazione finora
- Ã'Tia' Fiakdkdhl Úohd, H - FLD U 07: D.S. Senanayake College - Colombo 07Documento12 pagineÃ'Tia' Fiakdkdhl Úohd, H - FLD U 07: D.S. Senanayake College - Colombo 07joker boyNessuna valutazione finora