Potrebbero piacerti anche
- Fasteners Lecture 11-20-03Documento67 pagineFasteners Lecture 11-20-03laponggaNessuna valutazione finora
- Mindful Maths 1: Use Your Algebra to Solve These Puzzling PicturesDa EverandMindful Maths 1: Use Your Algebra to Solve These Puzzling PicturesNessuna valutazione finora
- Heat Rate Calc in ExcelDocumento13 pagineHeat Rate Calc in ExcelMukesh VadaliaNessuna valutazione finora
- 01-19 Diagnostic Trouble Code Table PDFDocumento40 pagine01-19 Diagnostic Trouble Code Table PDFmefisto06cNessuna valutazione finora
- (Solutions) Kittel - Introduction To Solid State Physics 8Th EditionDocumento60 pagine(Solutions) Kittel - Introduction To Solid State Physics 8Th EditionCody Foster0% (1)
- Answers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesDa EverandAnswers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesValutazione: 1.5 su 5 stelle1.5/5 (2)
- Cooling Water BasicsDocumento163 pagineCooling Water BasicsEduardo Castillo100% (1)
- Trigonometric Ratios to Transformations (Trigonometry) Mathematics E-Book For Public ExamsDa EverandTrigonometric Ratios to Transformations (Trigonometry) Mathematics E-Book For Public ExamsValutazione: 5 su 5 stelle5/5 (1)
- Knowledge Area Quiz-Project Integration ManagementDocumento4 pagineKnowledge Area Quiz-Project Integration Managementcrown212Nessuna valutazione finora
- Is 15707 2006Documento23 pagineIs 15707 2006anupam789Nessuna valutazione finora
- 7 ROOT LOCUS Part 1Documento7 pagine7 ROOT LOCUS Part 1vidya_sagar826Nessuna valutazione finora
- Analytic Geometry: Graphic Solutions Using Matlab LanguageDa EverandAnalytic Geometry: Graphic Solutions Using Matlab LanguageNessuna valutazione finora
- Root Locus 2 N. MagajiDocumento12 pagineRoot Locus 2 N. MagajiNuraddeen MagajiNessuna valutazione finora
- GE Pricelist 2017Documento2 pagineGE Pricelist 2017Rolando Cawaling100% (4)
- Root LocusDocumento18 pagineRoot Locussophieee19Nessuna valutazione finora
- 1.1 Control Philosophy CAS-1 NMDCDocumento36 pagine1.1 Control Philosophy CAS-1 NMDCkoushik42000Nessuna valutazione finora
- Practice Problems For Curve Fitting - SolutionDocumento8 paginePractice Problems For Curve Fitting - SolutionAnonymous ya6gBBwHJFNessuna valutazione finora
- Quality Risk ManagementDocumento29 pagineQuality Risk ManagementmmmmmNessuna valutazione finora
- CH 06Documento13 pagineCH 06HKVMVPVPV021511Nessuna valutazione finora
- Root Locus ExamplesDocumento5 pagineRoot Locus Examplesahmed s. Nour100% (1)
- Transient Response Stability: Solutions To Case Studies Challenges Antenna Control: Stability Design Via GainDocumento43 pagineTransient Response Stability: Solutions To Case Studies Challenges Antenna Control: Stability Design Via Gain오유택Nessuna valutazione finora
- Control Systems-1 PDFDocumento8 pagineControl Systems-1 PDFmaheshbabu527Nessuna valutazione finora
- Week 4 SolutionDocumento6 pagineWeek 4 SolutionRaja KumarNessuna valutazione finora
- Workbook Workbook Workbook Workbook Workbook: Try Yourself QuestionsDocumento26 pagineWorkbook Workbook Workbook Workbook Workbook: Try Yourself QuestionsashutoshsinghjssNessuna valutazione finora
- Solucionario Cap 2 33-47Documento9 pagineSolucionario Cap 2 33-47Gian Soriano MNessuna valutazione finora
- Sample Sample Answe Questions Questions Er Hints: Cs / Acs W14 Lect 2012Documento57 pagineSample Sample Answe Questions Questions Er Hints: Cs / Acs W14 Lect 2012Timothy AshleyNessuna valutazione finora
- Process Dynamics and Control Seborg 2nd Ch06 PDFDocumento43 pagineProcess Dynamics and Control Seborg 2nd Ch06 PDFRon PascualNessuna valutazione finora
- Task 1:: Write Your Answers of Task 1: S. No Pole Location Type of ResponseDocumento8 pagineTask 1:: Write Your Answers of Task 1: S. No Pole Location Type of ResponseAsim KhanNessuna valutazione finora
- Lecture 7 Problem Solving: AME 455 Control Systems DesignDocumento12 pagineLecture 7 Problem Solving: AME 455 Control Systems DesignJason ChiangNessuna valutazione finora
- OR Ass 2 AnsDocumento8 pagineOR Ass 2 AnsAshish TewariNessuna valutazione finora
- Math 201 Homework 6 With Solutions: WarningDocumento12 pagineMath 201 Homework 6 With Solutions: Warningboun_dNessuna valutazione finora
- FEE 411 CAT 2 With Solutions (2021.01.21) by Abdulrahman Abdalla FarisDocumento15 pagineFEE 411 CAT 2 With Solutions (2021.01.21) by Abdulrahman Abdalla FarisShadrack KipkemoiNessuna valutazione finora
- KVPY 2012 Stream SA Solved PaperDocumento22 pagineKVPY 2012 Stream SA Solved PaperKushal Kumar Reddy DNessuna valutazione finora
- Control Por Computador: November 12, 2013Documento17 pagineControl Por Computador: November 12, 2013turbodilanNessuna valutazione finora
- Solution Assignment 4Documento9 pagineSolution Assignment 4sushant sharmaNessuna valutazione finora
- KVPY 2012 Stream SB SX Solved PaperDocumento32 pagineKVPY 2012 Stream SB SX Solved PaperAnkitKambojNessuna valutazione finora
- MT221 Ejemplos LGRDocumento11 pagineMT221 Ejemplos LGRJoaquin Villacorta NerviNessuna valutazione finora
- Ee3304 hw1 SLNDocumento11 pagineEe3304 hw1 SLNzerocoderNessuna valutazione finora
- HW3 Solutions2printDocumento6 pagineHW3 Solutions2printයෙදුම් KarunarathnaNessuna valutazione finora
- Steady State ErrorsDocumento33 pagineSteady State Errorsasma mushtaqNessuna valutazione finora
- NSEJS Solution (Code-578) .Documento6 pagineNSEJS Solution (Code-578) .Yatish GoyalNessuna valutazione finora
- HwsDocumento9 pagineHwshudha69Nessuna valutazione finora
- Tugas Po Jadi - 567Documento6 pagineTugas Po Jadi - 567mzruriNessuna valutazione finora
- Tutorial 1T1Documento4 pagineTutorial 1T1izzazackNessuna valutazione finora
- M 307 Inverse Laplace PracticeDocumento2 pagineM 307 Inverse Laplace PracticeLesly Ann Pauline ManaoatNessuna valutazione finora
- Chapter 2 Stability Testing Routh HurwitzDocumento26 pagineChapter 2 Stability Testing Routh HurwitzAli AhmadNessuna valutazione finora
- Department of Electronics and Communication Engineering Assignment No: 1 Module Name: Control Systems Module Code: ELEC 20005.2 Session: ADocumento18 pagineDepartment of Electronics and Communication Engineering Assignment No: 1 Module Name: Control Systems Module Code: ELEC 20005.2 Session: AaneebaNessuna valutazione finora
- Control Por Computador: January 15, 2014Documento24 pagineControl Por Computador: January 15, 2014turbodilanNessuna valutazione finora
- CDS 101, Lecture 9.2 R. M. Murray, CaltechDocumento7 pagineCDS 101, Lecture 9.2 R. M. Murray, Caltechtidjani86Nessuna valutazione finora
- Automatic Control CH7Documento48 pagineAutomatic Control CH7廖偉丞Nessuna valutazione finora
- Assignment 02 SolutionsDocumento7 pagineAssignment 02 SolutionsBugra AYANNessuna valutazione finora
- Iit Paper II SolutionsDocumento7 pagineIit Paper II SolutionsRajeshKP65Nessuna valutazione finora
- Robin AssignmentDocumento29 pagineRobin AssignmentMoon Yu Jie100% (1)
- ENEE 660 HW Sol #7Documento8 pagineENEE 660 HW Sol #7PeacefulLionNessuna valutazione finora
- Lab 02Documento2 pagineLab 02CHEANG HOR PHENGNessuna valutazione finora
- Lecture 4 - Simple Design Problems: K. J. ÅströmDocumento7 pagineLecture 4 - Simple Design Problems: K. J. ÅströmEdutamNessuna valutazione finora
- Kvpy Paper XiiDocumento25 pagineKvpy Paper XiiVishank RustagiNessuna valutazione finora
- EAS 4101 Final Exam 2007Documento6 pagineEAS 4101 Final Exam 2007cNessuna valutazione finora
- Solution To Homework Assignment 4Documento6 pagineSolution To Homework Assignment 4cavanzasNessuna valutazione finora
- Activity 1: Week 10 - Laplace Transform Part 2 ActivitiesDocumento11 pagineActivity 1: Week 10 - Laplace Transform Part 2 ActivitiessiarwafaNessuna valutazione finora
- HW2 SolutionsDocumento5 pagineHW2 SolutionsMohammed Hamid RasheedNessuna valutazione finora
- Mathematics Mega Quiz For RRB NTPC (Solutions) : S1. Ans. (A) SolDocumento7 pagineMathematics Mega Quiz For RRB NTPC (Solutions) : S1. Ans. (A) SolASHOK KUMARNessuna valutazione finora
- Solución Tarea N°2: Ki KiDocumento26 pagineSolución Tarea N°2: Ki KicamiloNessuna valutazione finora
- KVPY 2012 SA SolutionsDocumento22 pagineKVPY 2012 SA SolutionsRachita AgrawalNessuna valutazione finora
- CONTROL SYSTEMS Set - 2 PDFDocumento10 pagineCONTROL SYSTEMS Set - 2 PDFmaheshbabu527Nessuna valutazione finora
- (A305) Otomatik Kontrol Ders Notu (Slayt)Documento27 pagine(A305) Otomatik Kontrol Ders Notu (Slayt)Mücahit Ezel100% (1)
- ch05 SolDocumento49 paginech05 Sol김서진Nessuna valutazione finora
- Ten-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesDa EverandTen-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesNessuna valutazione finora
- Mathematical Tables: Tables of in G [z] for Complex ArgumentDa EverandMathematical Tables: Tables of in G [z] for Complex ArgumentNessuna valutazione finora
- SuperOhm 3754 (3748-11) - Technical Data Sheet - ECC - Rev 2 - 2016-09Documento2 pagineSuperOhm 3754 (3748-11) - Technical Data Sheet - ECC - Rev 2 - 2016-09igor brocaNessuna valutazione finora
- Winter Internship Report (23/09/2016 - 31/01/2017)Documento56 pagineWinter Internship Report (23/09/2016 - 31/01/2017)AyushNessuna valutazione finora
- VarPlus Can - BLRCH104A125B48Documento2 pagineVarPlus Can - BLRCH104A125B48Achira DasanayakeNessuna valutazione finora
- Udyam Registration Certificate UDYAM-MH-26-0097771Documento3 pagineUdyam Registration Certificate UDYAM-MH-26-0097771Suresh D ChemateNessuna valutazione finora
- Stair Pressurization - ALLIED CONSULTANTDocumento8 pagineStair Pressurization - ALLIED CONSULTANTraifaisalNessuna valutazione finora
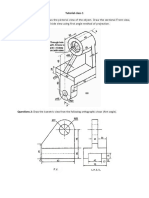
- Tutorial Class 1 Questions 1Documento2 pagineTutorial Class 1 Questions 1Bố Quỳnh ChiNessuna valutazione finora
- Pre-Spud Checklist # 4Documento2 paginePre-Spud Checklist # 4Yougchu LuanNessuna valutazione finora
- 2017 Petro Skills FacilitiesDocumento44 pagine2017 Petro Skills FacilitiesChirlly Ulai100% (1)
- CatalogDocumento76 pagineCatalogmkpasha55mpNessuna valutazione finora
- Deepwater Horizon Accident Investigation Report Appendices ABFGHDocumento37 pagineDeepwater Horizon Accident Investigation Report Appendices ABFGHBren-RNessuna valutazione finora
- NanoDocumento10 pagineNanoRavi TejaNessuna valutazione finora
- Simple and Compound Gear TrainDocumento2 pagineSimple and Compound Gear TrainHendri Yoga SaputraNessuna valutazione finora
- RCJ&Y - Jubail Industrial City 2: Phase 3 and 4 Sea Water Cooling StationDocumento5 pagineRCJ&Y - Jubail Industrial City 2: Phase 3 and 4 Sea Water Cooling Stationsalman KhanNessuna valutazione finora
- Technical Owner Manual Nfinity v6Documento116 pagineTechnical Owner Manual Nfinity v6Tom MondjollianNessuna valutazione finora
- Content Beyond SyllabusDocumento3 pagineContent Beyond SyllabusRahul PolNessuna valutazione finora
- CISCO Voice Over Frame Relay, ATM and IPDocumento61 pagineCISCO Voice Over Frame Relay, ATM and IPFahad RizwanNessuna valutazione finora
- Conjoint SpssDocumento28 pagineConjoint SpssstatsoumyaNessuna valutazione finora
- By George G. Meyerhof, F. Asce: J. Geotech. Engrg., 1983, 109 (6) : 797-806Documento10 pagineBy George G. Meyerhof, F. Asce: J. Geotech. Engrg., 1983, 109 (6) : 797-806PoYing HuangNessuna valutazione finora
- Vertical Take Off and LandingDocumento126 pagineVertical Take Off and LandingMukesh JindalNessuna valutazione finora
- Constraints in DBMS - Types of Constraints in DBMS - Gate VidyalayDocumento5 pagineConstraints in DBMS - Types of Constraints in DBMS - Gate VidyalayBivek Man SinghNessuna valutazione finora
- Raft TheoryDocumento37 pagineRaft Theorymuktha mukuNessuna valutazione finora




































































![Mathematical Tables: Tables of in G [z] for Complex Argument](https://imgv2-2-f.scribdassets.com/img/word_document/282615796/149x198/febb728e8d/1714993295?v=1)