Potrebbero piacerti anche
- Yaesu FT-707 Service ManualDocumento128 pagineYaesu FT-707 Service ManualYayok S. Anggoro100% (1)
- IB Physics 2 Summer Refresh WorkDocumento25 pagineIB Physics 2 Summer Refresh WorkJeffNessuna valutazione finora
- An 1138Documento18 pagineAn 1138Marco Tulio Da SilvaNessuna valutazione finora
- An-1138 IRS2092Documento18 pagineAn-1138 IRS2092Marcos SilvaNessuna valutazione finora
- UCC39421 3.3-V SEPIC Evaluation Board: User's GuideDocumento7 pagineUCC39421 3.3-V SEPIC Evaluation Board: User's GuidebensumbbNessuna valutazione finora
- Application Guide AC Pilot Wire Relaying System SPD and SPA RelaysDocumento24 pagineApplication Guide AC Pilot Wire Relaying System SPD and SPA RelaysSalman SahirNessuna valutazione finora
- Dla001d L6599DDocumento36 pagineDla001d L6599DBRIGHT_SPARK50% (6)
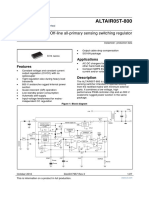
- Altair 05 TRDocumento27 pagineAltair 05 TRGenivaldo CostaNessuna valutazione finora
- Mirage b2530g ManualDocumento5 pagineMirage b2530g ManualWilliam C. AdamsNessuna valutazione finora
- L 6599 DDocumento36 pagineL 6599 DVidal VelasquezNessuna valutazione finora
- OP177Documento16 pagineOP177rahms79Nessuna valutazione finora
- Application Note AN-1159: IRS2052M Functional DescriptionDocumento44 pagineApplication Note AN-1159: IRS2052M Functional DescriptionNgân Hàng Ngô Mạnh TiếnNessuna valutazione finora
- Ice3b0565 PDFDocumento30 pagineIce3b0565 PDFimperadoreletronNessuna valutazione finora
- Service Manual St-21mf1 St21mf1 Chassis Ac5-G1 La76818a Lc863448w 24lc16b La78040 An7522n 2sk3264Documento30 pagineService Manual St-21mf1 St21mf1 Chassis Ac5-G1 La76818a Lc863448w 24lc16b La78040 An7522n 2sk3264marcial714100% (3)
- ValleyLab Force 2 - Service ManualDocumento68 pagineValleyLab Force 2 - Service ManualRuben Dario Vazquez Vera100% (8)
- Sanyo Cm21g81Documento26 pagineSanyo Cm21g81KathafiNessuna valutazione finora
- Summary ClockDocumento39 pagineSummary ClockmikcomiNessuna valutazione finora
- 6 D548 D 01Documento10 pagine6 D548 D 01Mehadi Alom ChoudhuryNessuna valutazione finora
- Interleaved DC-DC Boost Converter With Built-In MPPT AlgorithmDocumento18 pagineInterleaved DC-DC Boost Converter With Built-In MPPT AlgorithmAnudeep ReddyNessuna valutazione finora
- Snoa543a Low NoiseDocumento9 pagineSnoa543a Low Noisesteviej85Nessuna valutazione finora
- Improved High-Voltage Resonant Controller: FeaturesDocumento31 pagineImproved High-Voltage Resonant Controller: Featuressontuyet82Nessuna valutazione finora
- Fuji Starting Guide G11S-LE2 - Lift - 7Documento54 pagineFuji Starting Guide G11S-LE2 - Lift - 7Nguyen Anh Tu100% (3)
- L6599ADDocumento35 pagineL6599ADjuliojuder100% (1)
- Panasonic Sa-Pt470Documento154 paginePanasonic Sa-Pt470videoson100% (5)
- Icom Communications Receiver IC-R8500Documento48 pagineIcom Communications Receiver IC-R8500f_hayati100% (2)
- Sanyo Ce29kf8r Chassis Fc3-g2 SMDocumento32 pagineSanyo Ce29kf8r Chassis Fc3-g2 SMElandrey EmbuidoNessuna valutazione finora
- LB1690Documento5 pagineLB1690Lu Xu BuNessuna valutazione finora
- Manual Soft Starter PSD370 5309699-1Documento22 pagineManual Soft Starter PSD370 5309699-1Marcos AldrovandiNessuna valutazione finora
- Daewoo Model Dwl-28w8Documento53 pagineDaewoo Model Dwl-28w8livionetespanNessuna valutazione finora
- JST OM226025 - UPS Functioning DescriptionDocumento13 pagineJST OM226025 - UPS Functioning Descriptionhiddenhidden16Nessuna valutazione finora
- Sanyo c29lk40sDocumento30 pagineSanyo c29lk40sAdrian HernandezNessuna valutazione finora
- Applicationnote, V1.1, December2011: Never Stop ThinkingDocumento12 pagineApplicationnote, V1.1, December2011: Never Stop ThinkingYudi ElektroNessuna valutazione finora
- High-Efficiency, 2A, 16V, 500Khz Synchronous, Step-Down Converter in A 6-Pin Tsot 23 Description FeaturesDocumento17 pagineHigh-Efficiency, 2A, 16V, 500Khz Synchronous, Step-Down Converter in A 6-Pin Tsot 23 Description FeaturesAnonymous qpnZNmchFdNessuna valutazione finora
- 1HS01G PDFDocumento18 pagine1HS01G PDFAldo TonatoNessuna valutazione finora
- ADR155CUser Guide N56717020107-ADocumento106 pagineADR155CUser Guide N56717020107-ASembilan NagaNessuna valutazione finora
- TP 3200 ManualDocumento11 pagineTP 3200 ManualJean Carlos CâmaraNessuna valutazione finora
- Texas Instruments Applikation Note TMS37157Documento19 pagineTexas Instruments Applikation Note TMS37157Andrew KohNessuna valutazione finora
- Simple 1.5-V Boost Converter For MSP430 - Slaa105Documento7 pagineSimple 1.5-V Boost Converter For MSP430 - Slaa105Daniel ZancoNessuna valutazione finora
- SERVICE MANUAL Colour Television: Model No. PS2114Documento30 pagineSERVICE MANUAL Colour Television: Model No. PS2114Roger Martínez BermúdezNessuna valutazione finora
- CDF G30 G50Documento46 pagineCDF G30 G50Luis Arturo Leiva MonjarasNessuna valutazione finora
- fp0 A D Converter Unit Technical Manual 0811 PDFDocumento42 paginefp0 A D Converter Unit Technical Manual 0811 PDFHuuThienNessuna valutazione finora
- Alesis MATICA 500/900 (A4/A8) Service ManualDocumento22 pagineAlesis MATICA 500/900 (A4/A8) Service ManualFazar AhmadNessuna valutazione finora
- Lm43600 Simple Switcher 3.5 V To 36 V 0.5 A Synchronous Step-Down Voltage ConverterDocumento53 pagineLm43600 Simple Switcher 3.5 V To 36 V 0.5 A Synchronous Step-Down Voltage ConverterJoseph BernardNessuna valutazione finora
- Audiologic 2901TVGX - Sanyo C21LB29S Chasis LA5-ADocumento30 pagineAudiologic 2901TVGX - Sanyo C21LB29S Chasis LA5-AWalter AlvarengaNessuna valutazione finora
- Coolset™-F3: Off-Line Smps Current Mode Controller With Integrated 650V Startup Cell/Coolmos™Documento28 pagineCoolset™-F3: Off-Line Smps Current Mode Controller With Integrated 650V Startup Cell/Coolmos™Jesus SilvaNessuna valutazione finora
- User Manual Product Description Rectifier DPR 2000B/ 2900B Energe SeriesDocumento14 pagineUser Manual Product Description Rectifier DPR 2000B/ 2900B Energe Seriesmoumen BoughraraNessuna valutazione finora
- Viper 100Documento8 pagineViper 100SeanNessuna valutazione finora
- Funai 31a-650 31d-850 hm450 454edDocumento54 pagineFunai 31a-650 31d-850 hm450 454edszmikeNessuna valutazione finora
- Coolset™-F3: Off-Line Smps Current Mode Controller With Integrated 650V Startup Cell/Coolmos™Documento30 pagineCoolset™-F3: Off-Line Smps Current Mode Controller With Integrated 650V Startup Cell/Coolmos™cipmihaiNessuna valutazione finora
- FEBFAN7631 - L17U120A: User Guide ForDocumento44 pagineFEBFAN7631 - L17U120A: User Guide ForAntonio CamposNessuna valutazione finora
- Tua 6020V12030400Documento39 pagineTua 6020V12030400ChrisNessuna valutazione finora
- Poste A Souder Saf Prestotig 160 PFCDocumento44 paginePoste A Souder Saf Prestotig 160 PFCneobelhadjNessuna valutazione finora
- Basic of DCDCDocumento14 pagineBasic of DCDCAnil KoulNessuna valutazione finora
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Da EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Nessuna valutazione finora
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Da EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Valutazione: 2.5 su 5 stelle2.5/5 (3)
- Power Supply Projects: A Collection of Innovative and Practical Design ProjectsDa EverandPower Supply Projects: A Collection of Innovative and Practical Design ProjectsValutazione: 3 su 5 stelle3/5 (2)
- 110 Waveform Generator Projects for the Home ConstructorDa Everand110 Waveform Generator Projects for the Home ConstructorValutazione: 4 su 5 stelle4/5 (1)
- Electromagnetic InductionDocumento106 pagineElectromagnetic InductiondynamicranjanNessuna valutazione finora
- Detailed Notes - Topic 10 Equilibrium I - Edexcel Chemistry A LevelDocumento4 pagineDetailed Notes - Topic 10 Equilibrium I - Edexcel Chemistry A LevelLulwa KhaskiehNessuna valutazione finora
- Current Transformer PS ClassDocumento4 pagineCurrent Transformer PS ClassKing KingNessuna valutazione finora
- Compact Substation KioskDocumento2 pagineCompact Substation Kiosk4usangeetNessuna valutazione finora
- Tunnelling and Underground Space Technology Incorporating Trenchless Technology ResearchDocumento11 pagineTunnelling and Underground Space Technology Incorporating Trenchless Technology ResearchJuan SpinozaNessuna valutazione finora
- Thermodynamics QBDocumento15 pagineThermodynamics QBrajasamygopalNessuna valutazione finora
- ESR Metru Nou Cu Posibilitati de CalibrareDocumento6 pagineESR Metru Nou Cu Posibilitati de Calibraremsicoie1851Nessuna valutazione finora
- HG Series VCB - INTERRUPTORESDEVACIODocumento32 pagineHG Series VCB - INTERRUPTORESDEVACIOVICTOR RAÚL LEÓN MEDINANessuna valutazione finora
- T3 ME Performance Record Jan TemplateDocumento5 pagineT3 ME Performance Record Jan TemplateMuhd Khir RazaniNessuna valutazione finora
- Manual Buchas AbbDocumento24 pagineManual Buchas AbbLeandro DinizNessuna valutazione finora
- Multibody Simulation of A Freight Bogie With Friction DampersDocumento10 pagineMultibody Simulation of A Freight Bogie With Friction DampersGermán GoñiNessuna valutazione finora
- Reading Motion Graphs PracticeDocumento4 pagineReading Motion Graphs PracticeRachel WilliamsonNessuna valutazione finora
- SSC Je 2024 Electrical Engineering Solved Papers Technical and NonDocumento688 pagineSSC Je 2024 Electrical Engineering Solved Papers Technical and NonDIPAYAN MAHAPTRANessuna valutazione finora
- Basic Electrical Circuits DR Nagendra Krishnapura Department of Electrical Engineering Indian Institute of Technology Madras Lecture - 02Documento4 pagineBasic Electrical Circuits DR Nagendra Krishnapura Department of Electrical Engineering Indian Institute of Technology Madras Lecture - 02Deeban BabuNessuna valutazione finora
- Different Atom ModelsDocumento13 pagineDifferent Atom ModelsNoor Mohammad NofaerNessuna valutazione finora
- Formation Plant Electrical SystemDocumento47 pagineFormation Plant Electrical SystemRakoto MalalaNessuna valutazione finora
- Transformers Part 2Documento22 pagineTransformers Part 2joevane escrupolo100% (1)
- Lab ReportDocumento26 pagineLab Reportsanjana972Nessuna valutazione finora
- CurveBook Series E-150 Bell & Gossett-BCDocumento27 pagineCurveBook Series E-150 Bell & Gossett-BCIvan JimenezNessuna valutazione finora
- ALL Questions PagenumberDocumento64 pagineALL Questions PagenumbermariusNessuna valutazione finora
- A Novel Magnet Tubular Linear GeneratorDocumento6 pagineA Novel Magnet Tubular Linear GeneratorIsyana MelzNessuna valutazione finora
- DSE9701 DSE9702 Installation InstructionsDocumento2 pagineDSE9701 DSE9702 Installation Instructionsmuhammad wafiNessuna valutazione finora
- Operating Manual: Technosys SystemsDocumento7 pagineOperating Manual: Technosys SystemsJatin AcharyaNessuna valutazione finora
- Thermodynamics Lecture #01: Engr. Yasir Yasin Department of Mechanical EngineeringDocumento19 pagineThermodynamics Lecture #01: Engr. Yasir Yasin Department of Mechanical EngineeringyasiryasinNessuna valutazione finora
- Electrical Discharges in AirDocumento3 pagineElectrical Discharges in AirVlatko TrifunovicNessuna valutazione finora
- Electro Magnetic Field MCQ PDFDocumento64 pagineElectro Magnetic Field MCQ PDFAnonymous gFcnQ4go100% (3)
- Analysis of A Microwave Graphene-Based Patch Antenna: Luca Pierantoni Mircea Dragoman Davide MencarelliDocumento3 pagineAnalysis of A Microwave Graphene-Based Patch Antenna: Luca Pierantoni Mircea Dragoman Davide MencarellizahraNessuna valutazione finora
- EDC - Unit 3 FinalDocumento118 pagineEDC - Unit 3 FinalDr UmapathyNessuna valutazione finora
- Air Circuit Breaker Product Catalogue and ACB Price List - ShopelectDocumento4 pagineAir Circuit Breaker Product Catalogue and ACB Price List - ShopelectShopElectNessuna valutazione finora