Potrebbero piacerti anche
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (120)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Electronic Circuits For The Evil GeniusDocumento226 pagineElectronic Circuits For The Evil Geniuslaabi30% (1)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- Installation, Operation and Maintenance Instructions: Model 6032 Baylor Eddy Current BrakeDocumento68 pagineInstallation, Operation and Maintenance Instructions: Model 6032 Baylor Eddy Current BrakeCampo Anibal Grandas100% (1)
- Transfer Function of DC MotorDocumento16 pagineTransfer Function of DC Motorlaabi340% (5)
- Ti Mend Eight Reg Fives emDocumento3 pagineTi Mend Eight Reg Fives emlaabi3Nessuna valutazione finora
- Sinw ReadmeDocumento1 paginaSinw Readmelaabi3Nessuna valutazione finora
- Running Time ( 3.1) : InputDocumento5 pagineRunning Time ( 3.1) : InputMuhammad Kashif AyazNessuna valutazione finora
- The General Principles of Reality ADocumento194 pagineThe General Principles of Reality AfollowjesusNessuna valutazione finora
- Parameters of A Multiple-Arm Spiral Antenna From Single-Arm MeasurementsDocumento5 pagineParameters of A Multiple-Arm Spiral Antenna From Single-Arm MeasurementsMadeline CurryNessuna valutazione finora
- AM/FM Radio Kit ManualDocumento56 pagineAM/FM Radio Kit ManualWesley BrownNessuna valutazione finora
- Elektrotechnische Werke Fritz Driescher & Söhne GMBHDocumento4 pagineElektrotechnische Werke Fritz Driescher & Söhne GMBHKrishnakumar IesNessuna valutazione finora
- Serial Communication MFM384-C: Operating Instructions Outline Dimensions (In MM) Panel Cutout Dimensions (In MM)Documento4 pagineSerial Communication MFM384-C: Operating Instructions Outline Dimensions (In MM) Panel Cutout Dimensions (In MM)Nirmalya PalNessuna valutazione finora
- Materi 210422Documento7 pagineMateri 210422Hari YadiNessuna valutazione finora
- 9432Documento18 pagine9432Dan EsentherNessuna valutazione finora
- Guia BK Precision - How To Use An LCR MeterDocumento2 pagineGuia BK Precision - How To Use An LCR MeterChivoVaquitaAguileraNessuna valutazione finora
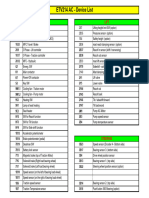
- ETV214 AC - Device List: Traction LiftDocumento41 pagineETV214 AC - Device List: Traction LiftKiều Văn TrungNessuna valutazione finora
- Tda8359 PDFDocumento20 pagineTda8359 PDFsiliboyNessuna valutazione finora
- Electrical Current Multiple ChoiceDocumento7 pagineElectrical Current Multiple ChoiceClaudio FacchineiNessuna valutazione finora
- Philips SBC 468Documento10 paginePhilips SBC 468laurent llacelNessuna valutazione finora
- A1d1-X Csa - CeDocumento3 pagineA1d1-X Csa - Ceharshithkumar20Nessuna valutazione finora
- Microstrip and CPW Power Divider Design: Keysight Eesof EdaDocumento16 pagineMicrostrip and CPW Power Divider Design: Keysight Eesof Edaمحمد المحمديNessuna valutazione finora
- EE 205 Circuit Theory Lab 4 3-Phase Balanced Circuit AnalysisDocumento3 pagineEE 205 Circuit Theory Lab 4 3-Phase Balanced Circuit AnalysisGürhan BekarNessuna valutazione finora
- Ansys Maxwell Egtm IcerigiDocumento2 pagineAnsys Maxwell Egtm IcerigiFeyza KaragözNessuna valutazione finora
- BS en 61810-7-2006Documento92 pagineBS en 61810-7-2006FilipeFerreiraNessuna valutazione finora
- LG PDP Module Pdp50g1 Service ManualDocumento61 pagineLG PDP Module Pdp50g1 Service ManualDavid Cheng100% (1)
- Unit - IV Semiconductor Physics: Prepared by Dr. T. KARTHICK, SASTRA Deemed UniversityDocumento21 pagineUnit - IV Semiconductor Physics: Prepared by Dr. T. KARTHICK, SASTRA Deemed UniversityMamidi Satya narayana100% (1)
- General NotesDocumento8 pagineGeneral NotesPradeesh Vijayan (v.prathi)100% (2)
- Wireless Power Transfer Literature Review by Naters BishDocumento15 pagineWireless Power Transfer Literature Review by Naters BishNaters BishNessuna valutazione finora
- Pre LABbDocumento5 paginePre LABbRʌʜɘɘɭ AŋsʌʀɩNessuna valutazione finora
- 1DPHYS - QUIZ1 (Electrostatics)Documento2 pagine1DPHYS - QUIZ1 (Electrostatics)Krishnaveni Subramani SNessuna valutazione finora
- Working Principle of Solar CellDocumento24 pagineWorking Principle of Solar CellVera KumarNessuna valutazione finora
- OSI Op To Electronics CatalogDocumento118 pagineOSI Op To Electronics Catalogshantanu142Nessuna valutazione finora
- BMW Trouble CodesDocumento7 pagineBMW Trouble CodesMaría Martz De GarcíaNessuna valutazione finora
- Amjad PDFDocumento3 pagineAmjad PDFAmjad AliNessuna valutazione finora
- 50W Forward Converter With Synchronous Rectification and Secondary Side Control PDFDocumento30 pagine50W Forward Converter With Synchronous Rectification and Secondary Side Control PDF양영주Nessuna valutazione finora
- Degine of 2 Stage CMOs Opamp......Documento14 pagineDegine of 2 Stage CMOs Opamp......Vinay MishraNessuna valutazione finora