Potrebbero piacerti anche
- Generator 307 USERDocumento54 pagineGenerator 307 USERLiviu PopaNessuna valutazione finora
- ECU-AIM Logger 110 EngDocumento56 pagineECU-AIM Logger 110 EngHabib GürbüzNessuna valutazione finora
- Throttle Body Explanation and CalibrationDocumento2 pagineThrottle Body Explanation and CalibrationReynaldo FloresNessuna valutazione finora
- Honda CityDocumento20 pagineHonda CityAlimi JasmanNessuna valutazione finora
- ECU Minco-F2 Manual enDocumento12 pagineECU Minco-F2 Manual enVerona MedinaNessuna valutazione finora
- Vdo Ecu PinDocumento3 pagineVdo Ecu PinjjoehairyNessuna valutazione finora
- Cables For AUTOCOM CDP For TrucksDocumento2 pagineCables For AUTOCOM CDP For TrucksOscar VillaseñorNessuna valutazione finora
- PowerWizard 1 (GB) (0208) PDFDocumento2 paginePowerWizard 1 (GB) (0208) PDFايمن الهدام100% (1)
- ABS (TMMMS Made), Brake Assist (TMMMS Made)Documento12 pagineABS (TMMMS Made), Brake Assist (TMMMS Made)Albert BriceñoNessuna valutazione finora
- Ipd 66031Documento42 pagineIpd 66031HannOtto StoreNessuna valutazione finora
- Diagnostic Codes: MitsubishiDocumento12 pagineDiagnostic Codes: Mitsubishiน้องกอย่า วงศ์เครือNessuna valutazione finora
- GPM 22Documento2 pagineGPM 22Khalid SaddikNessuna valutazione finora
- Manual de Reparacion para Transmision Automatica Modelo 5R55EDocumento120 pagineManual de Reparacion para Transmision Automatica Modelo 5R55EGerardo GallardoNessuna valutazione finora
- Система управления двигателемDocumento3 pagineСистема управления двигателемEdik Bonifacio MamaniNessuna valutazione finora
- 03 大众车系与自主品牌汽车电脑维修图集Documento64 pagine03 大众车系与自主品牌汽车电脑维修图集Kwun Hok ChongNessuna valutazione finora
- PDFDocumento5 paginePDFJohn Mark CorralesNessuna valutazione finora
- 636 Green Machine Operator ManualDocumento85 pagine636 Green Machine Operator Manualnenad100% (1)
- Engine RPM Measurement Using Timer 1 (Embedded C Programming and The Atmel Avr)Documento2 pagineEngine RPM Measurement Using Timer 1 (Embedded C Programming and The Atmel Avr)dinamik2t100% (1)
- TC1724 DS v12-785810Documento135 pagineTC1724 DS v12-785810balajiboss005Nessuna valutazione finora
- Mitsubishi E500 Series ManualDocumento225 pagineMitsubishi E500 Series ManualtoanchiNessuna valutazione finora
- Generic With Curtis 1268 5411 ControlDocumento6 pagineGeneric With Curtis 1268 5411 Controlpavli999Nessuna valutazione finora
- T TC014 06Documento2 pagineT TC014 06mario100% (1)
- ECDocumento339 pagineECulisse_Nessuna valutazione finora
- Alternator: Engine:: BF6M 1013 FCG2 ECP38-2SNDocumento7 pagineAlternator: Engine:: BF6M 1013 FCG2 ECP38-2SNalutttNessuna valutazione finora
- XTuner E3 User Manual V8.0Documento60 pagineXTuner E3 User Manual V8.0carlosve87Nessuna valutazione finora
- Can Bus PDFDocumento73 pagineCan Bus PDFmohanNessuna valutazione finora
- 5 - 12 Section 5 - Diagnosis J-1 ECM Connector Identification (1 of 2 J-1)Documento8 pagine5 - 12 Section 5 - Diagnosis J-1 ECM Connector Identification (1 of 2 J-1)MyBriggsNessuna valutazione finora
- FlaDocumento553 pagineFlacalvarez_5100% (1)
- Fusilera Peugeot 308 Mk2 2013-15Documento3 pagineFusilera Peugeot 308 Mk2 2013-15skpppNessuna valutazione finora
- Removing Mitsubishi Pajero ECUDocumento2 pagineRemoving Mitsubishi Pajero ECUJose GilmerNessuna valutazione finora
- 043 Man TruckDocumento4 pagine043 Man TruckFilipposNessuna valutazione finora
- 1 4runner Electrical Wiring DiagramDocumento35 pagine1 4runner Electrical Wiring DiagramEverardo Pineda ParraNessuna valutazione finora
- 321 Aim Pectel T6 100 EngDocumento5 pagine321 Aim Pectel T6 100 EngmisdeismoNessuna valutazione finora
- Grand Am Continental Tire Sports Integrating ECU PDFDocumento31 pagineGrand Am Continental Tire Sports Integrating ECU PDFsenthilvlNessuna valutazione finora
- Datasheet Alternator: - General CharacteristicsDocumento10 pagineDatasheet Alternator: - General Characteristicsnguyenbinh20Nessuna valutazione finora
- DVB - Nl5101d Set Top BoxDocumento5 pagineDVB - Nl5101d Set Top BoxSrinivasa Raju KNessuna valutazione finora
- Pinout-Schematic DiagramsDocumento14 paginePinout-Schematic DiagramsIvan RdzNessuna valutazione finora
- InteliNano NT Datasheet 2012-3 CPLENANODocumento6 pagineInteliNano NT Datasheet 2012-3 CPLENANOsdiaman100% (1)
- WairingDocumento6 pagineWairingDiecky ChristiawanNessuna valutazione finora
- Quick Reference TransistorDocumento125 pagineQuick Reference TransistorLuis Alonso Rosero VelezNessuna valutazione finora
- Avensis Intake System PDFDocumento19 pagineAvensis Intake System PDFMladen VidovićNessuna valutazione finora
- Multiport Fuel System (Mfi) : Group 13ADocumento64 pagineMultiport Fuel System (Mfi) : Group 13Ajagjitemir6014Nessuna valutazione finora
- Corolla Engine ControlDocumento12 pagineCorolla Engine ControlPatricio ValenciaNessuna valutazione finora
- V850ESDocumento6 pagineV850ESVictor Ramalho100% (1)
- Engine Immobiliser System (LHD W/O Smart Key System) : 244 LS430 (EWD435F) LS430 (EWD435F) 245Documento1 paginaEngine Immobiliser System (LHD W/O Smart Key System) : 244 LS430 (EWD435F) LS430 (EWD435F) 245Tomy100% (1)
- CDS61236 Ethernet Superseal Connector Cable 1.8M (Rev A and Rev B)Documento2 pagineCDS61236 Ethernet Superseal Connector Cable 1.8M (Rev A and Rev B)JAVIER ROMERONessuna valutazione finora
- Cip0340 CHECKING VVT SENSOR PDFDocumento5 pagineCip0340 CHECKING VVT SENSOR PDFDoDuyBacNessuna valutazione finora
- Global GuideDocumento292 pagineGlobal GuideGiangDoNessuna valutazione finora
- 97 Legacy GT ECU PinoutDocumento2 pagine97 Legacy GT ECU PinoutBen MonsonNessuna valutazione finora
- Civic IdleDocumento4 pagineCivic IdlexmariachiNessuna valutazione finora
- DC Motor Speed Control BC201Documento24 pagineDC Motor Speed Control BC201ROSEMARIO PORFIRIONessuna valutazione finora
- Instruments: Instrument Panels, PositionDocumento45 pagineInstruments: Instrument Panels, Positionssinokrot100% (1)
- Ecm 0555 080 0703Documento17 pagineEcm 0555 080 0703Anderson megusta el juegoNessuna valutazione finora
- Iri-Pro V2Documento8 pagineIri-Pro V2Arun KumarNessuna valutazione finora
- (DOM) Kobold FRT12 ManualDocumento12 pagine(DOM) Kobold FRT12 Manualvallolet_sb5185Nessuna valutazione finora
- L99DZ100G, L99DZ100GPDocumento197 pagineL99DZ100G, L99DZ100GPVenezuela is the 51st stateNessuna valutazione finora
- LMD18201 3A, 55V H-Bridge: Literature Number: SNVS092CDocumento14 pagineLMD18201 3A, 55V H-Bridge: Literature Number: SNVS092CIrfan AbbasiNessuna valutazione finora
- Quad Differential Drivers Bdg1A, Bdp1A, Bdgla, Bpnga, Bpnpa, and BppgaDocumento16 pagineQuad Differential Drivers Bdg1A, Bdp1A, Bdgla, Bpnga, Bpnpa, and Bppgacatsoithahuong84Nessuna valutazione finora
- AP2182Documento17 pagineAP2182ابراهيم السعيديNessuna valutazione finora
- Energy Metering Ic With Pulse Output: DescriptionDocumento7 pagineEnergy Metering Ic With Pulse Output: DescriptionvungocduongNessuna valutazione finora
- Kicks: This Brochure Reflects The Product Information For The 2020 Kicks. 2021 Kicks Brochure Coming SoonDocumento8 pagineKicks: This Brochure Reflects The Product Information For The 2020 Kicks. 2021 Kicks Brochure Coming SoonYudyChenNessuna valutazione finora
- Preventive Maintenance - HematologyDocumento5 paginePreventive Maintenance - HematologyBem GarciaNessuna valutazione finora
- 133 The Science and Understanding of TheDocumento14 pagine133 The Science and Understanding of TheCarlos RieraNessuna valutazione finora
- Nisha Rough DraftDocumento50 pagineNisha Rough DraftbharthanNessuna valutazione finora
- RetrieveDocumento8 pagineRetrieveSahian Montserrat Angeles HortaNessuna valutazione finora
- Manuscript - Batallantes &Lalong-Isip (2021) Research (Chapter 1 To Chapter 3)Documento46 pagineManuscript - Batallantes &Lalong-Isip (2021) Research (Chapter 1 To Chapter 3)Franzis Jayke BatallantesNessuna valutazione finora
- CH 2 Nature of ConflictDocumento45 pagineCH 2 Nature of ConflictAbdullahAlNoman100% (2)
- Tendernotice 1Documento42 pagineTendernotice 1Hanu MittalNessuna valutazione finora
- Types of MemoryDocumento3 pagineTypes of MemoryVenkatareddy Mula0% (1)
- Starkville Dispatch Eedition 12-9-18Documento28 pagineStarkville Dispatch Eedition 12-9-18The DispatchNessuna valutazione finora
- Introduction To AirtelDocumento6 pagineIntroduction To AirtelPriya Gupta100% (1)
- Presentation - Prof. Yuan-Shing PerngDocumento92 paginePresentation - Prof. Yuan-Shing PerngPhuongLoanNessuna valutazione finora
- Majalah Remaja Islam Drise #09 by Majalah Drise - Issuu PDFDocumento1 paginaMajalah Remaja Islam Drise #09 by Majalah Drise - Issuu PDFBalqis Ar-Rubayyi' Binti HasanNessuna valutazione finora
- Portfolio Report Zarin Tasnim Tazin 1920143 8Documento6 paginePortfolio Report Zarin Tasnim Tazin 1920143 8Fahad AlfiNessuna valutazione finora
- Data Book: Automotive TechnicalDocumento1 paginaData Book: Automotive TechnicalDima DovgheiNessuna valutazione finora
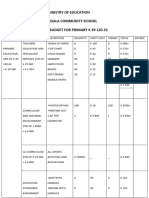
- Ministry of Education Musala SCHDocumento5 pagineMinistry of Education Musala SCHlaonimosesNessuna valutazione finora
- Ticket Udupi To MumbaiDocumento2 pagineTicket Udupi To MumbaikittushuklaNessuna valutazione finora
- Careem STRATEGIC MANAGEMENT FINAL TERM REPORTDocumento40 pagineCareem STRATEGIC MANAGEMENT FINAL TERM REPORTFahim QaiserNessuna valutazione finora
- INTERNSHIP PRESENTATION - Dhanya - 2020Documento16 pagineINTERNSHIP PRESENTATION - Dhanya - 2020Sanitha MichailNessuna valutazione finora
- Health Informatics SDocumento4 pagineHealth Informatics SnourhanNessuna valutazione finora
- Aluminium Extrusion Industry in IndiaDocumento3 pagineAluminium Extrusion Industry in Indiakalan45Nessuna valutazione finora
- WHO Partograph Study Lancet 1994Documento6 pagineWHO Partograph Study Lancet 1994Dewi PradnyaNessuna valutazione finora
- BPL-DF 2617aedrDocumento3 pagineBPL-DF 2617aedrBiomedical Incharge SRM TrichyNessuna valutazione finora
- Outage Analysis of Wireless CommunicationDocumento28 pagineOutage Analysis of Wireless CommunicationTarunav SahaNessuna valutazione finora
- La Salle Lipa Integrated School Senior High School Community 1 Quarter Summative Assessment Earth Science AY 2021-2022 Household Conservation PlanDocumento4 pagineLa Salle Lipa Integrated School Senior High School Community 1 Quarter Summative Assessment Earth Science AY 2021-2022 Household Conservation PlanKarlle ObviarNessuna valutazione finora
- Sangeetahealingtemples Com Tarot Card Reading Course in UsaDocumento3 pagineSangeetahealingtemples Com Tarot Card Reading Course in UsaSangeetahealing templesNessuna valutazione finora
- Reference: Digital Image Processing Rafael C. Gonzalez Richard E. WoodsDocumento43 pagineReference: Digital Image Processing Rafael C. Gonzalez Richard E. WoodsNisha JosephNessuna valutazione finora
- Allplan 2006 Engineering Tutorial PDFDocumento374 pagineAllplan 2006 Engineering Tutorial PDFEvelin EsthefaniaNessuna valutazione finora
- Marley Product Catalogue Brochure Grease TrapsDocumento1 paginaMarley Product Catalogue Brochure Grease TrapsKushalKallychurnNessuna valutazione finora
- Risk Analysis and Management - MCQs1Documento7 pagineRisk Analysis and Management - MCQs1Ravi SatyapalNessuna valutazione finora