Potrebbero piacerti anche
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- Catia Prismatic Machining User GuideDocumento345 pagineCatia Prismatic Machining User GuideiagomouNessuna valutazione finora
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Defects in Stainless SteelDocumento31 pagineDefects in Stainless SteelPrabhakar Kattula80% (5)
- Solid Works, Piping, Training ManualDocumento90 pagineSolid Works, Piping, Training ManualPio Rodolfo Pinto ReinosoNessuna valutazione finora
- NC Manufacturing VerificationDocumento67 pagineNC Manufacturing VerificationiagomouNessuna valutazione finora
- 3 Axis Surface MachiningDocumento512 pagine3 Axis Surface MachiningagrbovicNessuna valutazione finora
- MpgugDocumento96 pagineMpgugiagomouNessuna valutazione finora
- Tool Catalog Definition TutorialDocumento10 pagineTool Catalog Definition TutorialiagomouNessuna valutazione finora
- MfgugDocumento591 pagineMfgugpetroviccaaNessuna valutazione finora
- Prismatic Machining Preparation Assistant: What's New Getting StartedDocumento75 paginePrismatic Machining Preparation Assistant: What's New Getting StartediagomouNessuna valutazione finora
- ManualDocumento1.014 pagineManualhomesaru77Nessuna valutazione finora
- PLM Industry SolutionsDocumento21 paginePLM Industry SolutionsiagomouNessuna valutazione finora
- Interactive Drafting Por DiegoDocumento493 pagineInteractive Drafting Por DiegoiagomouNessuna valutazione finora
- PLM Industry SolutionsDocumento21 paginePLM Industry SolutionsiagomouNessuna valutazione finora
- DMU Navigator Por DiegoDocumento549 pagineDMU Navigator Por DiegoiagomouNessuna valutazione finora
- FloWorks TutorialDocumento244 pagineFloWorks TutorialRandolf RodriguezNessuna valutazione finora
- Cam WorksDocumento288 pagineCam WorksrodolfogcNessuna valutazione finora
- Firetroll User Interface Manual Ns550f-01-Instruction-manualDocumento16 pagineFiretroll User Interface Manual Ns550f-01-Instruction-manualMike CerreroNessuna valutazione finora
- Satellite Communication Module 4Documento34 pagineSatellite Communication Module 4JKNessuna valutazione finora
- Binomial Poisson Normal DistributionDocumento9 pagineBinomial Poisson Normal DistributionFahim MahmudNessuna valutazione finora
- Hana Table PartitioningDocumento12 pagineHana Table PartitioningGowri Prasanth Chaduvula0% (1)
- Excretion in Humans: Test Yourself 11.1 (Page 223)Documento2 pagineExcretion in Humans: Test Yourself 11.1 (Page 223)leeNessuna valutazione finora
- 39 - Profil Uang Elektronik - Spesifikasi TeknisDocumento9 pagine39 - Profil Uang Elektronik - Spesifikasi TeknisM DedeNessuna valutazione finora
- FAR21x7 28x7 Operator's Manual P 4-8-11Documento312 pagineFAR21x7 28x7 Operator's Manual P 4-8-11Miguel PerezNessuna valutazione finora
- 3.032 Problem Set 2 Solutions: Due: Start of Lecture, 09.21.07Documento16 pagine3.032 Problem Set 2 Solutions: Due: Start of Lecture, 09.21.07Pkay TandohNessuna valutazione finora
- Sample Questions Paper 2 - TNQT Digital-4July19Documento6 pagineSample Questions Paper 2 - TNQT Digital-4July19Gudimetla KowshikNessuna valutazione finora
- Game TheoryDocumento13 pagineGame TheoryPriyanka ChaurasiyaNessuna valutazione finora
- Ball BearingsDocumento31 pagineBall Bearingsnike_y2kNessuna valutazione finora
- BQ 76 PL 102Documento23 pagineBQ 76 PL 102AlexNessuna valutazione finora
- Komposisi Jenis Dan Struktur Vegetasi Hutan GambutDocumento13 pagineKomposisi Jenis Dan Struktur Vegetasi Hutan GambutI2O42OO54 IRFAN FAUZINessuna valutazione finora
- 435W 450W Astrotwins: Enjoy The Energy of The UniverseDocumento2 pagine435W 450W Astrotwins: Enjoy The Energy of The UniverseMiro MiroNessuna valutazione finora
- Bread and Pastry ProductionDocumento9 pagineBread and Pastry Productionwhite newgatesNessuna valutazione finora
- SAE-J1850 Communication Protocol Conformity Transmission Controller For Automotive LANDocumento59 pagineSAE-J1850 Communication Protocol Conformity Transmission Controller For Automotive LANMa Ngoc TrungNessuna valutazione finora
- Unit 7 Motion Review Sheet AnswersDocumento3 pagineUnit 7 Motion Review Sheet AnswersFlorie Fe Rosario Ortega100% (1)
- Completation Inteligent RevistaDocumento9 pagineCompletation Inteligent RevistaGabriel Castellon HinojosaNessuna valutazione finora
- Long Quiz Direct VariationDocumento2 pagineLong Quiz Direct VariationHermann Dejero LozanoNessuna valutazione finora
- Sony SDM-N50R PDFDocumento76 pagineSony SDM-N50R PDFFöldi BélaNessuna valutazione finora
- Ns 3 TutorialDocumento105 pagineNs 3 TutorialparabavireoNessuna valutazione finora
- SB 234Documento9 pagineSB 234JolettitoNessuna valutazione finora
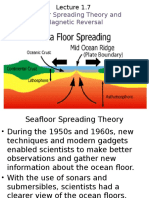
- Seafloor Spreading TheoryDocumento16 pagineSeafloor Spreading TheoryMark Anthony Evangelista Cabrieto100% (1)
- TractionDocumento26 pagineTractionYogesh GurjarNessuna valutazione finora
- 6-OpProfiles PrintableDocumento32 pagine6-OpProfiles PrintableGon_1313Nessuna valutazione finora
- Mathematics (0580/13) October/November 2019Documento12 pagineMathematics (0580/13) October/November 2019kdebipershadNessuna valutazione finora
- Reversible and Irreversible ChangesDocumento10 pagineReversible and Irreversible ChangesXerish DewanNessuna valutazione finora
- FluidsDocumento10 pagineFluidslara alghamdiNessuna valutazione finora
- Maquinaria Forestal..Documento14 pagineMaquinaria Forestal..Juan G ContrerasNessuna valutazione finora