Potrebbero piacerti anche
- Vibrations of Multi-Degree SystemsDocumento51 pagineVibrations of Multi-Degree SystemsKrishna MyakalaNessuna valutazione finora
- Elementary Tutorial: Fundamentals of Linear VibrationsDocumento51 pagineElementary Tutorial: Fundamentals of Linear VibrationsfujinyuanNessuna valutazione finora
- Buckled Beam Nonlinear VibrationDocumento10 pagineBuckled Beam Nonlinear Vibrationhmsedighi459Nessuna valutazione finora
- Unit 3 PDFDocumento17 pagineUnit 3 PDFGURUPRASAD KADAGADNessuna valutazione finora
- 3 SLAjitprasadDocumento17 pagine3 SLAjitprasadJaya JvNessuna valutazione finora
- Calc 2 Lecture Notes Section 7.2 1 of 8: Yx UxvyDocumento8 pagineCalc 2 Lecture Notes Section 7.2 1 of 8: Yx Uxvymasyuki1979Nessuna valutazione finora
- Rigorous Approach to Classifying Damping in Oscillating SystemsDocumento14 pagineRigorous Approach to Classifying Damping in Oscillating SystemsJonNessuna valutazione finora
- Chapter 22 The FEM Applied To Dynamic AnalysesDocumento16 pagineChapter 22 The FEM Applied To Dynamic AnalysesGabrielPaintingsNessuna valutazione finora
- L7 - Engineering Method For Dynamic AeroelasticityDocumento19 pagineL7 - Engineering Method For Dynamic AeroelasticityAbaziz Mousa OutlawZz100% (1)
- Fem Class Notes 1Documento39 pagineFem Class Notes 1VijaykumaranNessuna valutazione finora
- Modal Analysis Lecture NotesDocumento9 pagineModal Analysis Lecture Notesnim1987Nessuna valutazione finora
- Dynamic Model of Robot Manipulators: Claudio MelchiorriDocumento65 pagineDynamic Model of Robot Manipulators: Claudio MelchiorriSaxenaNessuna valutazione finora
- Chapt 07 Lect02Documento4 pagineChapt 07 Lect02Shanmukha SundaramNessuna valutazione finora
- Structural DynamicsDocumento99 pagineStructural DynamicsUtb Bjp100% (10)
- Empirical Models PDFDocumento11 pagineEmpirical Models PDFAhmed HummerNessuna valutazione finora
- Integral RiccatiDocumento22 pagineIntegral RiccatiTrongnghia Nick HuynhNessuna valutazione finora
- SeismicDocumento21 pagineSeismicsoumyasssNessuna valutazione finora
- Solving an inverse problem for the wave equation using a minimization algorithmDocumento22 pagineSolving an inverse problem for the wave equation using a minimization algorithmdeiveegan1Nessuna valutazione finora
- Moment Generating FunctionDocumento11 pagineMoment Generating FunctionDevanand T SanthaNessuna valutazione finora
- 1013 1877 1 SMDocumento7 pagine1013 1877 1 SMAgus Hendri WahyudiNessuna valutazione finora
- Printerversion Modal Analysis OldDocumento8 paginePrinterversion Modal Analysis OldSalvador SilveyraNessuna valutazione finora
- Global Stiffness MatrixDocumento13 pagineGlobal Stiffness Matrixasfsaf0% (1)
- The Control of Linear Time-Periodic Systems Using Floquet-Lyapunov Theory Pierre Montagnier, Raymond J. Spiteri, Jorge AngelesDocumento21 pagineThe Control of Linear Time-Periodic Systems Using Floquet-Lyapunov Theory Pierre Montagnier, Raymond J. Spiteri, Jorge AngelesijazNessuna valutazione finora
- Handout M.4 - Solutions of Ordinary Differential Equations: F T KX T X C T X MDocumento15 pagineHandout M.4 - Solutions of Ordinary Differential Equations: F T KX T X C T X MTushar DeshpandeNessuna valutazione finora
- Lecture 3 System ModelingDocumento16 pagineLecture 3 System Modelinganon_412646200Nessuna valutazione finora
- Interior-Point Methods in Model Predictive Control: Stephen WrightDocumento30 pagineInterior-Point Methods in Model Predictive Control: Stephen WrightIngole DeepakNessuna valutazione finora
- 12 - GanjiDocumento10 pagine12 - GanjiMaziar IraniNessuna valutazione finora
- Survey Matrix Products & ApplicationsDocumento19 pagineSurvey Matrix Products & ApplicationsCrepen LemuriosNessuna valutazione finora
- Dynamic Analysis of Plane Frame Structure Using Response Spectrum MethodDocumento12 pagineDynamic Analysis of Plane Frame Structure Using Response Spectrum Methodarunavaball100% (1)
- Solving The Dual Subproblem of The Method of Moving Asymptotes Using A Trust-Region SchemeDocumento20 pagineSolving The Dual Subproblem of The Method of Moving Asymptotes Using A Trust-Region SchemeTifroute MohamedNessuna valutazione finora
- Real Modes ExtractionDocumento10 pagineReal Modes ExtractionrenatobellarosaNessuna valutazione finora
- Modal Analysis of MDOF Forced Undamped SystemsDocumento11 pagineModal Analysis of MDOF Forced Undamped Systems王轩Nessuna valutazione finora
- 1 s2.0 0022247X72901278 MainDocumento12 pagine1 s2.0 0022247X72901278 MainMichael ZhaoNessuna valutazione finora
- Mujeeb Ur Rehman and Umer Saeed: C 2015 Korean Mathematical SocietyDocumento28 pagineMujeeb Ur Rehman and Umer Saeed: C 2015 Korean Mathematical SocietyVe LopiNessuna valutazione finora
- Section 1.8 Stability: Stability Is Defined For The Solution of Free Response CaseDocumento24 pagineSection 1.8 Stability: Stability Is Defined For The Solution of Free Response CaserajasekharjvNessuna valutazione finora
- Sliding Mode Control For Linear Uncertain Switched Systems: N M×N N TDocumento5 pagineSliding Mode Control For Linear Uncertain Switched Systems: N M×N N TWaj DINessuna valutazione finora
- Chapter-6: Energy Method (Lagrange's Method)Documento35 pagineChapter-6: Energy Method (Lagrange's Method)ideepujNessuna valutazione finora
- Lagranzian MechanicsDocumento24 pagineLagranzian MechanicsFanis VlazakisNessuna valutazione finora
- Aa242B: Mechanical Vibrations: Analytical Dynamics of Discrete SystemsDocumento40 pagineAa242B: Mechanical Vibrations: Analytical Dynamics of Discrete SystemsdozioNessuna valutazione finora
- Chapt 01 Lect02Documento6 pagineChapt 01 Lect02Shanmukha SundaramNessuna valutazione finora
- Nonlinear Dynamics of Two Degree of Freedom Systems With Linear and Nonlinear Stiffnesses (Bayat, Et Al. 2013)Documento10 pagineNonlinear Dynamics of Two Degree of Freedom Systems With Linear and Nonlinear Stiffnesses (Bayat, Et Al. 2013)Jose ManuelNessuna valutazione finora
- Modal AnalysisDocumento40 pagineModal AnalysisSumit Thakur100% (1)
- A Semi-Analytical Model For Deflection Analysis of Laminated Plates With The Newton-Kantorovich-Quadrature MethodDocumento10 pagineA Semi-Analytical Model For Deflection Analysis of Laminated Plates With The Newton-Kantorovich-Quadrature MethodJefferson MantuanoNessuna valutazione finora
- Mechanical - Engineering - Mechanical Vibrations - Single Degree of Freedom Systems - NotesDocumento17 pagineMechanical - Engineering - Mechanical Vibrations - Single Degree of Freedom Systems - NotesJaffar AliNessuna valutazione finora
- Mdof Solution ReviewDocumento29 pagineMdof Solution ReviewengrasheedNessuna valutazione finora
- Mechanics of Solids 2: The University of SydneyDocumento5 pagineMechanics of Solids 2: The University of SydneyJim LettermanNessuna valutazione finora
- A New Efficient Fuzzy StructureDocumento7 pagineA New Efficient Fuzzy Structuremathdeba1983faceNessuna valutazione finora
- Topic 3 Forced Vibration of Multi-Degree-of-Freedom Systems - IDocumento4 pagineTopic 3 Forced Vibration of Multi-Degree-of-Freedom Systems - IstefanNessuna valutazione finora
- KAM Theory and Celestial MechanicsDocumento24 pagineKAM Theory and Celestial MechanicsLorena Monterrosas PérezNessuna valutazione finora
- NUMERICAL METHODS FOR SOLVING EQUATIONS AND EIGENVALUE PROBLEMSDocumento27 pagineNUMERICAL METHODS FOR SOLVING EQUATIONS AND EIGENVALUE PROBLEMSmsurfudeen6681Nessuna valutazione finora
- HW 07Documento7 pagineHW 07BirsenŞanlıAkınNessuna valutazione finora
- A New Method of Multisegment Integration For The Nonlinear Analysis of Shells of RevolutionDocumento17 pagineA New Method of Multisegment Integration For The Nonlinear Analysis of Shells of RevolutionSharmin SumiNessuna valutazione finora
- Sdof DynDocumento29 pagineSdof DynAnkur KurmiNessuna valutazione finora
- Identification and Estimation (Empirical Models) : D T U G T yDocumento11 pagineIdentification and Estimation (Empirical Models) : D T U G T yAnonymous JDXbBDBNessuna valutazione finora
- C. Zalian: Nonlinear Coupled Oscillators, Blazhko Effect and SynchronisationDocumento4 pagineC. Zalian: Nonlinear Coupled Oscillators, Blazhko Effect and SynchronisationLucas1283Nessuna valutazione finora
- S1/2 Regularization Methods and Fixed Point Algorithms for Affine Rank MinimizationDocumento28 pagineS1/2 Regularization Methods and Fixed Point Algorithms for Affine Rank MinimizationVanidevi ManiNessuna valutazione finora
- Constructed Layered Systems: Measurements and AnalysisDa EverandConstructed Layered Systems: Measurements and AnalysisNessuna valutazione finora
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Da EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Nessuna valutazione finora
- Power Geometry in Algebraic and Differential EquationsDa EverandPower Geometry in Algebraic and Differential EquationsNessuna valutazione finora
- Chapter-I Circulation and VorticityDocumento23 pagineChapter-I Circulation and VorticitydrsomenathduttaNessuna valutazione finora
- Chapt 07 Lect02Documento4 pagineChapt 07 Lect02Shanmukha SundaramNessuna valutazione finora
- Chapter-I Circulation and VorticityDocumento23 pagineChapter-I Circulation and VorticitydrsomenathduttaNessuna valutazione finora
- IV. Nature of Finite Element Solutions: Stiffening EffectDocumento7 pagineIV. Nature of Finite Element Solutions: Stiffening EffectShanmukha SundaramNessuna valutazione finora
- Chapter-I Circulation and VorticityDocumento23 pagineChapter-I Circulation and VorticitydrsomenathduttaNessuna valutazione finora
- Chapt 06 Lect03Documento6 pagineChapt 06 Lect03Shanmukha SundaramNessuna valutazione finora
- Chapter-I Circulation and VorticityDocumento23 pagineChapter-I Circulation and VorticitydrsomenathduttaNessuna valutazione finora
- Mindlin Plate TheoryDocumento10 pagineMindlin Plate TheoryKunal RanjaneNessuna valutazione finora
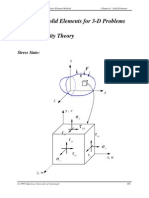
- Chapter 6. Solid Elements For 3-D Problems I. 3-D Elasticity TheoryDocumento6 pagineChapter 6. Solid Elements For 3-D Problems I. 3-D Elasticity TheoryShanmukha SundaramNessuna valutazione finora
- Chapt 05 Lect02Documento9 pagineChapt 05 Lect02Shanmukha SundaramNessuna valutazione finora
- Chapter 4. Finite Element Modeling and Solution TechniquesDocumento2 pagineChapter 4. Finite Element Modeling and Solution TechniquesShanmukha SundaramNessuna valutazione finora
- Chapter-I Circulation and VorticityDocumento23 pagineChapter-I Circulation and VorticitydrsomenathduttaNessuna valutazione finora
- Chapt 02 Lect05Documento5 pagineChapt 02 Lect05Shanmukha SundaramNessuna valutazione finora
- Chapter-I Circulation and VorticityDocumento23 pagineChapter-I Circulation and VorticitydrsomenathduttaNessuna valutazione finora
- Chapter-I Circulation and VorticityDocumento23 pagineChapter-I Circulation and VorticitydrsomenathduttaNessuna valutazione finora
- Chapter-I Circulation and VorticityDocumento23 pagineChapter-I Circulation and VorticitydrsomenathduttaNessuna valutazione finora
- Chapter-I Circulation and VorticityDocumento23 pagineChapter-I Circulation and VorticitydrsomenathduttaNessuna valutazione finora
- Chapter-I Circulation and VorticityDocumento23 pagineChapter-I Circulation and VorticitydrsomenathduttaNessuna valutazione finora
- Chapt 02 Lect01Documento7 pagineChapt 02 Lect01Shanmukha SundaramNessuna valutazione finora
- Chapt 02 Lect06Documento7 pagineChapt 02 Lect06Shanmukha SundaramNessuna valutazione finora
- Introduction To Finite Element Method - Chapt - 02 - Lect04Documento9 pagineIntroduction To Finite Element Method - Chapt - 02 - Lect04Eng_2014Nessuna valutazione finora
- Chapt 02 Lect07Documento3 pagineChapt 02 Lect07Shanmukha SundaramNessuna valutazione finora
- Chapt 02 Lect03Documento6 pagineChapt 02 Lect03Shanmukha SundaramNessuna valutazione finora
- Chapt 01 Lect04Documento5 pagineChapt 01 Lect04Shanmukha SundaramNessuna valutazione finora
- Chapt 02 Lect02Documento6 pagineChapt 02 Lect02Shanmukha SundaramNessuna valutazione finora
- Heat ExchangerDocumento155 pagineHeat ExchangerSajilal JosephNessuna valutazione finora
- Chapt 01 Lect02Documento6 pagineChapt 01 Lect02Shanmukha SundaramNessuna valutazione finora
- Chapter-I Circulation and VorticityDocumento23 pagineChapter-I Circulation and VorticitydrsomenathduttaNessuna valutazione finora
- How To Implement Birth and Death Tecnique in Ansys Workbench - ResearchGateDocumento13 pagineHow To Implement Birth and Death Tecnique in Ansys Workbench - ResearchGatechethanNessuna valutazione finora
- Bbek4203 - Principles of MacroeconomicsDocumento9 pagineBbek4203 - Principles of MacroeconomicsSimon RajNessuna valutazione finora
- Unit 2: Understanding Local NetworksDocumento12 pagineUnit 2: Understanding Local Networksglenn.tabucanonNessuna valutazione finora
- ReviewerDocumento7 pagineReviewerDiana Marie Vargas CariñoNessuna valutazione finora
- FogoDocumento3 pagineFogoخالد المصرىNessuna valutazione finora
- How To Create A Website in 3 Steps - Beginners GuideDocumento21 pagineHow To Create A Website in 3 Steps - Beginners GuideBrand IT AgencyNessuna valutazione finora
- Students' Positive Perceptions of Gamification with KahootDocumento22 pagineStudents' Positive Perceptions of Gamification with KahootAna Carolina da FonteNessuna valutazione finora
- SIMATIC S7 Connector Configurator enUS en-USDocumento104 pagineSIMATIC S7 Connector Configurator enUS en-USnemarc08Nessuna valutazione finora
- Survival Part 5Documento36 pagineSurvival Part 5bmartindoyle6396Nessuna valutazione finora
- Practical Work 1: Use of Word Processor Practical Work DescriptionDocumento1 paginaPractical Work 1: Use of Word Processor Practical Work DescriptionWanAminudinNessuna valutazione finora
- User ExperienceDocumento5 pagineUser ExperienceSidharthNessuna valutazione finora
- Xilinx DCMDocumento23 pagineXilinx DCMFitohdezNessuna valutazione finora
- RCS LITE Product Launch - Customer PresentationDocumento24 pagineRCS LITE Product Launch - Customer PresentationPedro Miguel Moreira Pereira100% (2)
- Current-Controlled Sawtooth Generator: Active and Passive Electronic Components September 2004Documento6 pagineCurrent-Controlled Sawtooth Generator: Active and Passive Electronic Components September 2004AquariusNessuna valutazione finora
- StressFree Sketching Week 1 Assignment LTDocumento2 pagineStressFree Sketching Week 1 Assignment LTMariana BelhamNessuna valutazione finora
- Quick start rules for honor-based RPGDocumento3 pagineQuick start rules for honor-based RPGBraulio MenezesNessuna valutazione finora
- Tomas Del Rosario College: City of BalangaDocumento2 pagineTomas Del Rosario College: City of BalangavaneknekNessuna valutazione finora
- 1.1 Introduction To Developer/2000 For The WebDocumento20 pagine1.1 Introduction To Developer/2000 For The WebsadicosadicoNessuna valutazione finora
- EEE 3342 Syllabus 2017 Fall PDFDocumento4 pagineEEE 3342 Syllabus 2017 Fall PDFAnonymous HPc8YL9Nessuna valutazione finora
- ANN-Based Pressure Transducer with Improved Inductive Signal ConditioningDocumento8 pagineANN-Based Pressure Transducer with Improved Inductive Signal ConditioningSAMENessuna valutazione finora
- Models - Acdc.heating CircuitDocumento24 pagineModels - Acdc.heating Circuitvenalum90Nessuna valutazione finora
- Teldat SD Wan Features Description April 2018 180413Documento35 pagineTeldat SD Wan Features Description April 2018 180413casinaroNessuna valutazione finora
- PathfinderDocumento91 paginePathfinderShashi SagarNessuna valutazione finora
- Gis DatabasesDocumento27 pagineGis Databasessenwelo gulubaneNessuna valutazione finora
- Azur 340A - Service ManualDocumento21 pagineAzur 340A - Service ManualfabrizioNessuna valutazione finora
- Advanced Java Interview QuestionsDocumento9 pagineAdvanced Java Interview QuestionsparagNessuna valutazione finora
- Panasonic KX td1232 - CompressDocumento6 paginePanasonic KX td1232 - CompressasfdsadfNessuna valutazione finora
- U1 - T3 - B. Business Model Innovation PDFDocumento43 pagineU1 - T3 - B. Business Model Innovation PDFAdriana juarezNessuna valutazione finora
- PPTDocumento16 paginePPTmaheshrubiksNessuna valutazione finora