Potrebbero piacerti anche
- Layer Name Colour Line TypeDocumento32 pagineLayer Name Colour Line TypeNitish TakalkarNessuna valutazione finora
- Tata Consulting Engineers LimitedDocumento24 pagineTata Consulting Engineers LimitedNitish TakalkarNessuna valutazione finora
- EP For Monorail For Ammonium Nitrate Management Area 1Documento4 pagineEP For Monorail For Ammonium Nitrate Management Area 1Nitish TakalkarNessuna valutazione finora
- Derivation of Dead Loads PDFDocumento3 pagineDerivation of Dead Loads PDFNitish TakalkarNessuna valutazione finora
- Visualizing Structural Designs in 3DDocumento3 pagineVisualizing Structural Designs in 3DNitish TakalkarNessuna valutazione finora
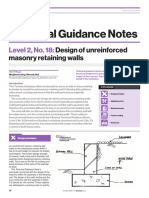
- Technical Guidance Notes: Level 2, No. 18Documento4 pagineTechnical Guidance Notes: Level 2, No. 18Nitish TakalkarNessuna valutazione finora
- Geotechnical Design of Mooring Anchor Block (Circular) : Check For SlidingDocumento5 pagineGeotechnical Design of Mooring Anchor Block (Circular) : Check For SlidingNitish TakalkarNessuna valutazione finora
- Technical Guidance Note (Level 1 No. 6) - Notional Loading (Equivalent Horizontal Forces)Documento3 pagineTechnical Guidance Note (Level 1 No. 6) - Notional Loading (Equivalent Horizontal Forces)MohanNessuna valutazione finora
- A Comparison of Canadian, Mexican, and United States Steel Design StandardsDocumento15 pagineA Comparison of Canadian, Mexican, and United States Steel Design Standardsfred flintstoneNessuna valutazione finora
- Baseplate - Prama InstrumentsDocumento4 pagineBaseplate - Prama InstrumentsNitish TakalkarNessuna valutazione finora
- Designing A Concrete Beam: Icon LegendDocumento5 pagineDesigning A Concrete Beam: Icon LegendNitish TakalkarNessuna valutazione finora
- Forces From Junction - Concrete and Channel Column C1A: Design PhilosopyDocumento1 paginaForces From Junction - Concrete and Channel Column C1A: Design PhilosopyNitish TakalkarNessuna valutazione finora
- Emp News 8 To14 AugDocumento32 pagineEmp News 8 To14 AugbeckNessuna valutazione finora
- Glass as a structural material: An introductionDocumento5 pagineGlass as a structural material: An introductionNitish TakalkarNessuna valutazione finora
- Sample DBR With MonoslopeDocumento27 pagineSample DBR With MonoslopeNitish TakalkarNessuna valutazione finora
- Sample DBR With MonoslopeDocumento27 pagineSample DBR With MonoslopeNitish TakalkarNessuna valutazione finora
- Canam Purlins and Girts Catalogue CanadaDocumento0 pagineCanam Purlins and Girts Catalogue CanadasaivanvalendezNessuna valutazione finora
- Frame Design Using RISA3DDocumento9 pagineFrame Design Using RISA3DNitish TakalkarNessuna valutazione finora
- Job#: 2015-016 Deck Calculator: Lateral Loads: Q .00256K K K VDocumento2 pagineJob#: 2015-016 Deck Calculator: Lateral Loads: Q .00256K K K VNitish TakalkarNessuna valutazione finora
- ASCE Member Advancement FormDocumento2 pagineASCE Member Advancement FormNitish TakalkarNessuna valutazione finora
- 23-WAVELETS - Theory and Applications An Introduction PDFDocumento75 pagine23-WAVELETS - Theory and Applications An Introduction PDFsenersinNessuna valutazione finora
- Worshop 77 Epicons Building AnalysisDocumento1 paginaWorshop 77 Epicons Building AnalysisNitish TakalkarNessuna valutazione finora
- Ohio GratingDocumento112 pagineOhio GratingNitish TakalkarNessuna valutazione finora
- Rafter DesignDocumento7 pagineRafter DesignNitish TakalkarNessuna valutazione finora
- The Institution of Engineers (India) : IntpeDocumento8 pagineThe Institution of Engineers (India) : IntpekanchanabalajiNessuna valutazione finora
- Canam Purlins and Girts Catalogue Canada1Documento4 pagineCanam Purlins and Girts Catalogue Canada1Nitish TakalkarNessuna valutazione finora
- Chap 4Documento5 pagineChap 4Nitish TakalkarNessuna valutazione finora
- Blighs TheoryDocumento5 pagineBlighs TheoryAnde Bhanu100% (1)
- 10 Things You Must Check Before Buying PropertyDocumento2 pagine10 Things You Must Check Before Buying PropertyNitish TakalkarNessuna valutazione finora
- Common Wind Design Errors and How to Avoid ThemDocumento102 pagineCommon Wind Design Errors and How to Avoid ThemFernando RiveraNessuna valutazione finora
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5784)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (890)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (587)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (72)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (119)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Peabody y Movent ABCDocumento11 paginePeabody y Movent ABCIngrid BarkoNessuna valutazione finora
- Chapter 5: Work, Energy and PowerDocumento4 pagineChapter 5: Work, Energy and PowerPriyaa JayasankarNessuna valutazione finora
- Endothermic Reactions Absorb HeatDocumento2 pagineEndothermic Reactions Absorb HeatRista WaniNessuna valutazione finora
- EC424 Monetary Economics (Michaelmas Term) Additional QuestionsDocumento5 pagineEC424 Monetary Economics (Michaelmas Term) Additional QuestionsSteamPunkNessuna valutazione finora
- 7-3 IP Board Part (SMPS Part) : 7 Block DiagramsDocumento8 pagine7-3 IP Board Part (SMPS Part) : 7 Block DiagramsSonu KumarNessuna valutazione finora
- CBCS StatisticsDocumento79 pagineCBCS StatisticsXING XINGNessuna valutazione finora
- Priority Academic Student Skills Mathematics Grades 1-5Documento44 paginePriority Academic Student Skills Mathematics Grades 1-5faithinhim7515Nessuna valutazione finora
- Elec4602 NotesDocumento34 pagineElec4602 NotesDavid VangNessuna valutazione finora
- Matematika BookDocumento335 pagineMatematika BookDidit Gencar Laksana100% (1)
- Mark SchemeDocumento12 pagineMark SchemeNdanji SiameNessuna valutazione finora
- Astrology, Believe It or Not - OCRDocumento155 pagineAstrology, Believe It or Not - OCRShashwat Singh Pokharel100% (2)
- Puppo, F. (2012) - Dalla Vaghezza Del Linguaggio Alla Retorica Forense. Saggio Di Logica GiuridicaDocumento3 paginePuppo, F. (2012) - Dalla Vaghezza Del Linguaggio Alla Retorica Forense. Saggio Di Logica GiuridicaAldunIdhunNessuna valutazione finora
- Vorplex - MST - Airblowing and Water FlushingDocumento14 pagineVorplex - MST - Airblowing and Water FlushingAmirHakimRusliNessuna valutazione finora
- As Statistics Mechanics 1Documento240 pagineAs Statistics Mechanics 1claire zhouNessuna valutazione finora
- CN Lab ManualDocumento49 pagineCN Lab ManualKN DEEPSHI100% (1)
- Chemistry Investigatory File Handmade NewDocumento17 pagineChemistry Investigatory File Handmade NewMadhusudan PeriwalNessuna valutazione finora
- Manual 2012-08 EDocumento59 pagineManual 2012-08 EfiorelaNessuna valutazione finora
- Petroleum GeomechanicsDocumento35 paginePetroleum GeomechanicsAnonymous y6UMzakPW100% (1)
- GGGDocumento23 pagineGGGWarNaWarNiNessuna valutazione finora
- Introducing Congestion Avoidance: Implement The Diffserv Qos ModelDocumento39 pagineIntroducing Congestion Avoidance: Implement The Diffserv Qos ModelrajkumarlodhNessuna valutazione finora
- Module 11A-09 Turbine Aeroplane Aerodynamics, Structures and SystemsDocumento133 pagineModule 11A-09 Turbine Aeroplane Aerodynamics, Structures and SystemsИлларион ПанасенкоNessuna valutazione finora
- Reed - Camion - XT39R4 - 1003 - Technical Manual - Panel de Control PDFDocumento293 pagineReed - Camion - XT39R4 - 1003 - Technical Manual - Panel de Control PDFLuisEduardoHerreraCamargo100% (1)
- Staad FoundationDocumento25 pagineStaad FoundationAnonymous nwByj9L100% (2)
- CREATE A CORRECTLY SCALED NETWORK FROM SCRATCHDocumento5 pagineCREATE A CORRECTLY SCALED NETWORK FROM SCRATCHMauricio Senior RamírezNessuna valutazione finora
- Experiment List (FEE)Documento5 pagineExperiment List (FEE)bpkeleNessuna valutazione finora
- Justifying The CMM: (Coordinate Measuring Machine)Documento6 pagineJustifying The CMM: (Coordinate Measuring Machine)pm089Nessuna valutazione finora
- Data Communication & Computer NetworksDocumento32 pagineData Communication & Computer NetworksMuhammad NadeemNessuna valutazione finora
- Service Repair Manual - (Cat) Caterpillar 3126 Machine Engine SN 1bw, 55kDocumento1.094 pagineService Repair Manual - (Cat) Caterpillar 3126 Machine Engine SN 1bw, 55kLen Wal100% (2)
- Assignment 2Documento6 pagineAssignment 2Umar ZahidNessuna valutazione finora
- PHY 107 Force and Motion 1 NotesDocumento14 paginePHY 107 Force and Motion 1 Notessojib yeasinNessuna valutazione finora