Potrebbero piacerti anche
- Fetjul PDFDocumento3 pagineFetjul PDFBen GencarelleNessuna valutazione finora
- Analysis On IGBT DevelopmentsDocumento6 pagineAnalysis On IGBT DevelopmentsGopal Chandra MahatoNessuna valutazione finora
- Gate Drive Hexfet Power MosfetsDocumento22 pagineGate Drive Hexfet Power MosfetsNacer MezghicheNessuna valutazione finora
- Use Gate Charge to Design Drive Circuits for Power TransistorsDocumento6 pagineUse Gate Charge to Design Drive Circuits for Power TransistorsmattiuffNessuna valutazione finora
- 1.a.characteristics of MOSFETDocumento8 pagine1.a.characteristics of MOSFETSamudrala SrikarNessuna valutazione finora
- Driving Transistors and ThyristorsDocumento11 pagineDriving Transistors and ThyristorsEugenio NanniNessuna valutazione finora
- Ministry Of Higher Education Northern Technical University Technical College /Mosul Department Of Computer Engineering MOSFET CharacterizationDocumento11 pagineMinistry Of Higher Education Northern Technical University Technical College /Mosul Department Of Computer Engineering MOSFET Characterizationالزهور لخدمات الانترنيتNessuna valutazione finora
- An 4160Documento8 pagineAn 4160aurumstar2000Nessuna valutazione finora
- Gate Drive Design For MOSFETDocumento5 pagineGate Drive Design For MOSFETgubiliNessuna valutazione finora
- An-978 HV Floating MOS Gate DriversDocumento21 pagineAn-978 HV Floating MOS Gate DriversPeter RueNessuna valutazione finora
- GTO Application Aspects: Principles of Operation, Gate Drive and Switching BehaviorDocumento27 pagineGTO Application Aspects: Principles of Operation, Gate Drive and Switching BehaviorMohammed Raif MelhimNessuna valutazione finora
- HV Floating MOS-Gate Driver ICs Application NoteDocumento24 pagineHV Floating MOS-Gate Driver ICs Application NoteEdy AchalmaNessuna valutazione finora
- Instituto Tecnológico de La Costa GrandeDocumento10 pagineInstituto Tecnológico de La Costa GrandeEver ContrerasNessuna valutazione finora
- Ieee Delangen 1998Documento15 pagineIeee Delangen 1998kurabyqldNessuna valutazione finora
- BEng FETDocumento13 pagineBEng FETJai GaizinNessuna valutazione finora
- Implementation and Simulation of Half Bridge Series Resonant Inverter in Zero Voltage SwitchingDocumento5 pagineImplementation and Simulation of Half Bridge Series Resonant Inverter in Zero Voltage Switchingwhite_lonelinessNessuna valutazione finora
- Application of JFETDocumento13 pagineApplication of JFETtalha2905100% (10)
- 1 To 5 ManualDocumento30 pagine1 To 5 ManualRoshan DodiyaNessuna valutazione finora
- BJT and MosfetDocumento10 pagineBJT and MosfetankitabcNessuna valutazione finora
- DC DC Design GuideDocumento23 pagineDC DC Design Guidehammouche_soufianeNessuna valutazione finora
- Mosfets BasicsDocumento7 pagineMosfets Basicsodl_123Nessuna valutazione finora
- Drive Circuits For Power Mosfets and IgbtsDocumento11 pagineDrive Circuits For Power Mosfets and IgbtsZamanundaIEEENessuna valutazione finora
- Single Phase Multi-Level PWM Inverter Topologies Using Coupled InductorsDocumento7 pagineSingle Phase Multi-Level PWM Inverter Topologies Using Coupled InductorskvhkrishnanNessuna valutazione finora
- Driving Transistors and Thyristors ChapterDocumento11 pagineDriving Transistors and Thyristors Chaptermitros100% (2)
- Simulation and Analysis of Bulk Driven Circuits For Low Power ApplicationsDocumento4 pagineSimulation and Analysis of Bulk Driven Circuits For Low Power ApplicationsAbhishek MatNessuna valutazione finora
- Modern DC To DC Switchmode Power Converter CircuitsDocumento362 pagineModern DC To DC Switchmode Power Converter CircuitsTocean Duong100% (5)
- Design Concept for a Transformerless Solar InverterDocumento3 pagineDesign Concept for a Transformerless Solar InverterdragonjahirshaNessuna valutazione finora
- DfajkoadfjkadfDocumento1 paginaDfajkoadfjkadfMoonlightNessuna valutazione finora
- SW - Buck - 1 Application Report: Topology: Non Synchronous Buck Converter Controller: Texas Instruments TPS40200Documento25 pagineSW - Buck - 1 Application Report: Topology: Non Synchronous Buck Converter Controller: Texas Instruments TPS40200Ion AvramNessuna valutazione finora
- Mosfet DrivesDocumento15 pagineMosfet DrivesJIBIN K JNessuna valutazione finora
- Basic Electronics 6 2006Documento47 pagineBasic Electronics 6 2006umamaheshcoolNessuna valutazione finora
- Precision Constant Current Source For Electrical Impedance TomographyDocumento4 paginePrecision Constant Current Source For Electrical Impedance Tomographyjorgeluis.unknownman667Nessuna valutazione finora
- An-990 Application Characterization of IGBT'sDocumento31 pagineAn-990 Application Characterization of IGBT'sVasco RodriguesNessuna valutazione finora
- AN5004Documento5 pagineAN5004rdc02271Nessuna valutazione finora
- Low Power High Speed I/O Interfaces in 0.18um CmosDocumento4 pagineLow Power High Speed I/O Interfaces in 0.18um Cmosayou_smartNessuna valutazione finora
- Assignment On Different Types of Electronic Switches-1Documento16 pagineAssignment On Different Types of Electronic Switches-1AkibulHassanSazalNessuna valutazione finora
- 84 - Insulated Gate Bipolar Transistors (Igbts)Documento2 pagine84 - Insulated Gate Bipolar Transistors (Igbts)Guillermo DelgadoNessuna valutazione finora
- Application Note AN-6027: Design of Power Factor Correction Circuit Using FAN7530Documento16 pagineApplication Note AN-6027: Design of Power Factor Correction Circuit Using FAN7530Malanie Sriya De SilvaNessuna valutazione finora
- An 6026Documento23 pagineAn 6026Иван АлексиевNessuna valutazione finora
- The Phase Control Circuit The TC787Documento10 pagineThe Phase Control Circuit The TC787nansusanNessuna valutazione finora
- K 203Documento5 pagineK 203Alexandre S. CorrêaNessuna valutazione finora
- ESM740G TiristorDocumento2 pagineESM740G Tiristorjosenicolas12000Nessuna valutazione finora
- Gate Driver NotesDocumento2 pagineGate Driver NotesBeng FoongNessuna valutazione finora
- Basic Principles of Accurate Dynamic Current MirrorsDocumento6 pagineBasic Principles of Accurate Dynamic Current MirrorsKumar RaviNessuna valutazione finora
- Teoria Del MosfetDocumento7 pagineTeoria Del Mosfetdarknosferatus666Nessuna valutazione finora
- Mosfet Gate DriveDocumento6 pagineMosfet Gate DrivegubiliNessuna valutazione finora
- Latest Technology PT Igbts vs. Power Mosfets: Application Note Apt0302 Rev. A April 4, 2003Documento6 pagineLatest Technology PT Igbts vs. Power Mosfets: Application Note Apt0302 Rev. A April 4, 2003Jyothsna VayyalaNessuna valutazione finora
- Experiment No: DateDocumento24 pagineExperiment No: DateChaitanya ShahNessuna valutazione finora
- H BridgeDocumento16 pagineH BridgeSkiron ThrasciusNessuna valutazione finora
- IGBT Module Driver Circuit DesignDocumento3 pagineIGBT Module Driver Circuit DesignNarendra BholeNessuna valutazione finora
- Design Concept For A Transformerless Solar Inverter: Renewable PowerDocumento3 pagineDesign Concept For A Transformerless Solar Inverter: Renewable Powerzeljkoc21Nessuna valutazione finora
- Build a variety of voltage converters from popular ICsDocumento6 pagineBuild a variety of voltage converters from popular ICsSudheesh Puthanpurayil100% (1)
- A Comparator With Reduced Delay Time in 65-nm CMOS For Supply Voltages Down To 0.65 VDocumento5 pagineA Comparator With Reduced Delay Time in 65-nm CMOS For Supply Voltages Down To 0.65 VSrinivasAnchalaNessuna valutazione finora
- Igbt BasicsDocumento16 pagineIgbt BasicsRahul SoniNessuna valutazione finora
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Da EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Nessuna valutazione finora
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Da EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Valutazione: 2.5 su 5 stelle2.5/5 (3)
- Power System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)Da EverandPower System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)Nessuna valutazione finora
- Service Manual: NSX-AJ310 NSX-SZ310 NSX-SZ315 NSX-SZ510Documento42 pagineService Manual: NSX-AJ310 NSX-SZ310 NSX-SZ315 NSX-SZ510Luis HernandezNessuna valutazione finora
- LP2951Documento42 pagineLP2951Eduard KeynesNessuna valutazione finora
- LM78l05 SOT-89Documento7 pagineLM78l05 SOT-89Eduard KeynesNessuna valutazione finora
- DPU 2000R UCA Technical GuideDocumento166 pagineDPU 2000R UCA Technical GuideEduard KeynesNessuna valutazione finora
- User Manual - ICircuit - The Realtime Circuit Simulator and EditorDocumento28 pagineUser Manual - ICircuit - The Realtime Circuit Simulator and EditorjancliNessuna valutazione finora
- CBSE Grade 12 Revision Paper (Physics) Semester 1 ExamDocumento10 pagineCBSE Grade 12 Revision Paper (Physics) Semester 1 ExamaditiNessuna valutazione finora
- Service ManualDocumento54 pagineService ManualGiancarloRichardRivadeneyraMiranda50% (2)
- Dual Output Power Supply PDFDocumento3 pagineDual Output Power Supply PDFjozoceNessuna valutazione finora
- Pdvsa N-252Documento34 paginePdvsa N-252Yuliana SantiagoNessuna valutazione finora
- Remote Digital ClockDocumento79 pagineRemote Digital ClockArdhika Dhennis Putra AnandaNessuna valutazione finora
- Reduce Power Losses Distribution MethodsDocumento27 pagineReduce Power Losses Distribution MethodssayedmhNessuna valutazione finora
- Multistage Coil GunDocumento29 pagineMultistage Coil GunlykaonasNessuna valutazione finora
- LB 100 Operations Manual NewDocumento23 pagineLB 100 Operations Manual NewUdoNessuna valutazione finora
- Gate 2007 Questions 1-20Documento30 pagineGate 2007 Questions 1-20prabhjot singh1Nessuna valutazione finora
- Uttarakhand TTA 2013 NotificationDocumento13 pagineUttarakhand TTA 2013 NotificationReviewKeys.comNessuna valutazione finora
- Defibrillator TesterDocumento4 pagineDefibrillator Testerdenivaldo2009Nessuna valutazione finora
- Hyundai Excel X2 1989-1998 Air ConditioningDocumento53 pagineHyundai Excel X2 1989-1998 Air ConditioningaurbinaeNessuna valutazione finora
- Sensors: A Digital-Analog Hybrid System-on-Chip For Capacitive Sensor Measurement and ControlDocumento14 pagineSensors: A Digital-Analog Hybrid System-on-Chip For Capacitive Sensor Measurement and ControlChao-Shiun WangNessuna valutazione finora
- Am Loop Antennas 2004Documento355 pagineAm Loop Antennas 2004ggibney0856100% (3)
- Technology and Livelihood EducationDocumento16 pagineTechnology and Livelihood EducationBlue Marlin Rodilla GakoNessuna valutazione finora
- Vedantu Chapter 1 Physics Class 12 PDFDocumento48 pagineVedantu Chapter 1 Physics Class 12 PDFJISHNU DUHANNessuna valutazione finora
- AND8346/D A519Hrt Hart Modem: Application NoteDocumento19 pagineAND8346/D A519Hrt Hart Modem: Application NoteNowan HatsenNessuna valutazione finora
- The Journal of Engineering - 2020 - Meah - Design Build and Test Drive A FSAE Electric Vehicle PDFDocumento7 pagineThe Journal of Engineering - 2020 - Meah - Design Build and Test Drive A FSAE Electric Vehicle PDFZahid AhmadNessuna valutazione finora
- Oscilator KeramičkiDocumento7 pagineOscilator Keramičkiacodr83Nessuna valutazione finora
- MX-D2T Schematic DiagramsDocumento14 pagineMX-D2T Schematic Diagramsjota_60254Nessuna valutazione finora
- Fire Safety Assessment of Electrical Devices Under Regard of Airworthiness Authorities RequirementsDocumento20 pagineFire Safety Assessment of Electrical Devices Under Regard of Airworthiness Authorities RequirementsCORAL ALONSONessuna valutazione finora
- A Series Tuned Harmonic FilterDocumento59 pagineA Series Tuned Harmonic Filterajitkalel1986Nessuna valutazione finora
- Physics Grade 10Documento228 paginePhysics Grade 10Jan92% (26)
- YasKawa Documentation Sigma VDocumento114 pagineYasKawa Documentation Sigma VRobert DăboiNessuna valutazione finora
- اختبار حاسبات فيز2 ترم صيفي 2020-2021Documento12 pagineاختبار حاسبات فيز2 ترم صيفي 2020-2021Nabel MohamedNessuna valutazione finora
- Copeland Hermetic 2003Documento20 pagineCopeland Hermetic 2003quetecojaunburroNessuna valutazione finora
- TCSCDocumento21 pagineTCSCAniruddha RayNessuna valutazione finora
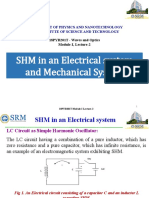
- SHM in An Electrical System and Mechanical SystemDocumento12 pagineSHM in An Electrical System and Mechanical Systemvenkateswaran k.sNessuna valutazione finora
- DC-AC Inverter 10KWDocumento125 pagineDC-AC Inverter 10KWnishan80% (5)