Potrebbero piacerti anche
- Haytham Ibrahim's Assignment No.2 PDFDocumento29 pagineHaytham Ibrahim's Assignment No.2 PDFAhmed KhairiNessuna valutazione finora
- Resultant of Coplanar ForcesDocumento18 pagineResultant of Coplanar Forcesapi-24848312486% (7)
- Computer Science For The Masses: Robert Sedgewick Princeton UniversityDocumento50 pagineComputer Science For The Masses: Robert Sedgewick Princeton University김형진Nessuna valutazione finora
- Blended-Learning-Plan-Form (Mathematics 7)Documento2 pagineBlended-Learning-Plan-Form (Mathematics 7)KarlzNessuna valutazione finora
- Static Force AnalysisDocumento39 pagineStatic Force AnalysisShrikant BhoyarNessuna valutazione finora
- LN 10, 11 & 12 - ME 1227 Engineering MechanicsDocumento33 pagineLN 10, 11 & 12 - ME 1227 Engineering MechanicsSakibNessuna valutazione finora
- Chapter - 1 - Static Force Analysis PDFDocumento29 pagineChapter - 1 - Static Force Analysis PDFSourabh JangraNessuna valutazione finora
- 7 Force AnalysisDocumento19 pagine7 Force AnalysisEn Eskay100% (1)
- Equilibrium of A Rigid Body Rigid BodyDocumento41 pagineEquilibrium of A Rigid Body Rigid BodyJean Zyrelle AuronNessuna valutazione finora
- Binder 4Documento30 pagineBinder 4Ryan AntonioNessuna valutazione finora
- MECH 211 - Equilibrium of Force SystemsDocumento26 pagineMECH 211 - Equilibrium of Force SystemsJohn David AbarquezNessuna valutazione finora
- Static Force AnalysisDocumento10 pagineStatic Force Analysisrk545Nessuna valutazione finora
- 5-Static EquilibriumDocumento31 pagine5-Static EquilibriumKnowledgeIsTruePowerNessuna valutazione finora
- Review Chapter 4-5Documento29 pagineReview Chapter 4-5fannyparamitaNessuna valutazione finora
- Static Force Analysis of Planar MechanismsDocumento14 pagineStatic Force Analysis of Planar Mechanismsa c s KumarNessuna valutazione finora
- Forces and EquilibriumDocumento57 pagineForces and EquilibriumUnknown_unknown_unknownNessuna valutazione finora
- Equations Used For Rectangular ComponentsDocumento8 pagineEquations Used For Rectangular ComponentsSri RamNessuna valutazione finora
- Principles of StaticsDocumento10 paginePrinciples of Staticsblue nnnNessuna valutazione finora
- Chapter 5b Force Resultant SystemDocumento38 pagineChapter 5b Force Resultant SystemRyan Philip CatapangNessuna valutazione finora
- LN 5 & 6 - ME 1227 Engineering MechanicsDocumento32 pagineLN 5 & 6 - ME 1227 Engineering MechanicsSakibNessuna valutazione finora
- Equilibrium of Particle (Important Notes)Documento36 pagineEquilibrium of Particle (Important Notes)Farhan AliNessuna valutazione finora
- Md. Musfiqur Rahman Milton: Lecturer, CSE BaiustDocumento15 pagineMd. Musfiqur Rahman Milton: Lecturer, CSE Baiustadiba adibNessuna valutazione finora
- Week 1. Analysis of ForcesDocumento56 pagineWeek 1. Analysis of Forcespauline aerielNessuna valutazione finora
- Turning Effect of ForceDocumento14 pagineTurning Effect of ForceAbdur RahmanNessuna valutazione finora
- Lecture 11Documento42 pagineLecture 11Abraham OmomhenleNessuna valutazione finora
- L3: Equivalent Systems of Forces Moment of A Force: Statics of Rigid BodiesDocumento8 pagineL3: Equivalent Systems of Forces Moment of A Force: Statics of Rigid BodiesJohn Laurence Gonzaga AlcantaraNessuna valutazione finora
- Statics and Dynamics Chapter 3Documento22 pagineStatics and Dynamics Chapter 3Sh ErazNessuna valutazione finora
- Chapter 2 Forces and EquilibriumDocumento53 pagineChapter 2 Forces and EquilibriumvinoNessuna valutazione finora
- Chapter 4Documento35 pagineChapter 4Nur Amira Mardiana ZulkifliNessuna valutazione finora
- Topic 2 Force VectorDocumento56 pagineTopic 2 Force VectorhmzhwryajNessuna valutazione finora
- Chapter 3 Rigid BodyDocumento21 pagineChapter 3 Rigid BodyimfendiNessuna valutazione finora
- Vector Analysis: The Force Table: ObjectDocumento5 pagineVector Analysis: The Force Table: ObjectEdward FerrerNessuna valutazione finora
- Statics of Rigid BodiesDocumento57 pagineStatics of Rigid BodiesAnna Louise WyNessuna valutazione finora
- Coplanar Non Concurrent Force SystemsDocumento23 pagineCoplanar Non Concurrent Force SystemsLester MarquezNessuna valutazione finora
- Engineering Mechanics: Statics: Course OverviewDocumento51 pagineEngineering Mechanics: Statics: Course OverviewNazmus Sakib AlinNessuna valutazione finora
- Lesson 2 Resultant of Force SystemDocumento26 pagineLesson 2 Resultant of Force SystemRainiel MontalbaNessuna valutazione finora
- Coplanar & Non Coplanar Force Systems PDFDocumento23 pagineCoplanar & Non Coplanar Force Systems PDFMohammed Sumer50% (2)
- Dynamics of Machinery: DefinitionsDocumento52 pagineDynamics of Machinery: Definitionsemre ozdemirNessuna valutazione finora
- Statics ch2 - Present - 4 (3D Moment and Couple) PDFDocumento21 pagineStatics ch2 - Present - 4 (3D Moment and Couple) PDFKeith Tanaka MagakaNessuna valutazione finora
- CVE 253 Course OutlineDocumento53 pagineCVE 253 Course OutlineSamuelShinaAyodeleNessuna valutazione finora
- Lecture Notes For Section 3 - 4Documento17 pagineLecture Notes For Section 3 - 4McFinnNessuna valutazione finora
- Statics Chapter 4Documento11 pagineStatics Chapter 4aniceto labianNessuna valutazione finora
- Principles of StaticsDocumento7 paginePrinciples of StaticsJommarVocalTagalogNessuna valutazione finora
- Bedford Fowler Chap 4Documento11 pagineBedford Fowler Chap 4Asheesh KumarNessuna valutazione finora
- Vector AdditionDocumento6 pagineVector AdditionKevin Habaluyas100% (1)
- Equilibrium of Rigid BodiesDocumento4 pagineEquilibrium of Rigid Bodiesjoshua villeranNessuna valutazione finora
- Statics - Chapter 4 Sem 2 1415Documento49 pagineStatics - Chapter 4 Sem 2 1415Nik Muhd AriffNessuna valutazione finora
- Unit 2 Force SystemsDocumento46 pagineUnit 2 Force Systemsputex247Nessuna valutazione finora
- JJ205 Engineering Mechanic Chapter 3 Jj205Documento5 pagineJJ205 Engineering Mechanic Chapter 3 Jj205Ah TiangNessuna valutazione finora
- Chapter 3 Analysis of Pin Jointed FramesDocumento19 pagineChapter 3 Analysis of Pin Jointed Framesghodghod123Nessuna valutazione finora
- Theory 1Documento191 pagineTheory 1Joseph Arben Agus100% (1)
- Chapter 5 - PDFDocumento47 pagineChapter 5 - PDFFiras Abu taleb100% (1)
- 15MEC302 Dynamics of Machines Static Force Analysis Solved ProblemsDocumento21 pagine15MEC302 Dynamics of Machines Static Force Analysis Solved ProblemsAashrith VNessuna valutazione finora
- 5 2020 02 13!12 40 35 AmDocumento10 pagine5 2020 02 13!12 40 35 AmRaafa AliankaNessuna valutazione finora
- ME 121: Engineering MechanicsDocumento28 pagineME 121: Engineering MechanicsMuhammad FahadNessuna valutazione finora
- StaticsC04 05 22102013 PDFDocumento49 pagineStaticsC04 05 22102013 PDFAlex LopezNessuna valutazione finora
- ME111 1.1 The Mechanical Design Process: 9/27/00 ME111 Lecture 1 1 9/27/00 ME111 Lecture 1 2Documento9 pagineME111 1.1 The Mechanical Design Process: 9/27/00 ME111 Lecture 1 1 9/27/00 ME111 Lecture 1 2Adam NortonNessuna valutazione finora
- 03 Equilibrium of A ParticleDocumento60 pagine03 Equilibrium of A ParticleBaran KirazNessuna valutazione finora
- Quality Control and Analysis: Ujvnl Ae 2016Documento7 pagineQuality Control and Analysis: Ujvnl Ae 2016Sagar ThengilNessuna valutazione finora
- Handover Parameter 2GDocumento17 pagineHandover Parameter 2GSon EricNessuna valutazione finora
- Eqps + Notes (TCS)Documento92 pagineEqps + Notes (TCS)vinayak pawarNessuna valutazione finora
- Javaunit1 130907015927Documento29 pagineJavaunit1 130907015927UjjWal MahAjanNessuna valutazione finora
- 1 MergedDocumento182 pagine1 MergedYash kumarNessuna valutazione finora
- Intro To Machine Learning: Pembelajaran Mesin D4 Ti IFY IT Del 2019Documento17 pagineIntro To Machine Learning: Pembelajaran Mesin D4 Ti IFY IT Del 2019Hanzel ArdeoNessuna valutazione finora
- Phase Difference & Phase RelationshipsDocumento24 paginePhase Difference & Phase RelationshipsGabriel Carl AlpuertoNessuna valutazione finora
- Fundamentals of Neural NetworksDocumento62 pagineFundamentals of Neural NetworksDivya Aseeja100% (2)
- Comparative Study of RP-HPLC and UV Spectrophotometric Techniques For The Simultaneous Determination of Amoxicillin and Cloxacillin in CapsulesDocumento6 pagineComparative Study of RP-HPLC and UV Spectrophotometric Techniques For The Simultaneous Determination of Amoxicillin and Cloxacillin in Capsulesiabureid7460Nessuna valutazione finora
- Quay Walls DesignDocumento12 pagineQuay Walls DesignAdrian Frantescu100% (1)
- JEXPO MathsDocumento6 pagineJEXPO MathsAvijit Das.Nessuna valutazione finora
- AEPSHEP2012Documento300 pagineAEPSHEP2012Vitaly VorobyevNessuna valutazione finora
- Grade 3 MTAP Sample Problem Set 1Documento14 pagineGrade 3 MTAP Sample Problem Set 1Jianmagz Gaming100% (1)
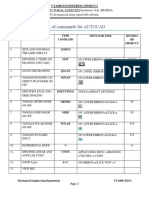
- List of Commands For Autocad: Cad Lab Tutorial Exercises Instructor: S.K. Sharma To Be Practiced Using Autocad SoftwareDocumento15 pagineList of Commands For Autocad: Cad Lab Tutorial Exercises Instructor: S.K. Sharma To Be Practiced Using Autocad SoftwareShakeelNessuna valutazione finora
- Speed and Position Control of A DC Motor Using ATmega328Documento5 pagineSpeed and Position Control of A DC Motor Using ATmega328GRD JournalsNessuna valutazione finora
- Solved Multiple Choice Questions of DataDocumento40 pagineSolved Multiple Choice Questions of Datamini projectNessuna valutazione finora
- Notes On Absolutely Continuous Functions of Several VariablesDocumento16 pagineNotes On Absolutely Continuous Functions of Several VariablesSufyanNessuna valutazione finora
- Newsletter April 3-7Documento1 paginaNewsletter April 3-7api-245696657Nessuna valutazione finora
- 01otr 02ourDocumento53 pagine01otr 02ourKeerthana KNessuna valutazione finora
- Representation of Numeric Data in Computer-1Documento3 pagineRepresentation of Numeric Data in Computer-1Anthony LoñezNessuna valutazione finora
- Gate Best QuestionsDocumento17 pagineGate Best QuestionsAnmolKumarNessuna valutazione finora
- 3 - ANN Part One PDFDocumento30 pagine3 - ANN Part One PDFIsmael EspinozaNessuna valutazione finora
- Study of OscillationDocumento4 pagineStudy of OscillationPHƯỚC DƯƠNG THANHNessuna valutazione finora
- DWDM R19 Unit 1Documento27 pagineDWDM R19 Unit 1GAYATHRI KAMMARA 19MIS7006Nessuna valutazione finora
- Deflection Considerations in Two-Way Reinforced CoDocumento13 pagineDeflection Considerations in Two-Way Reinforced CoHamid HassanzadaNessuna valutazione finora
- Quant Checklist 132 PDF 2022 by Aashish AroraDocumento70 pagineQuant Checklist 132 PDF 2022 by Aashish AroraRajnish SharmaNessuna valutazione finora