Potrebbero piacerti anche
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Partial Stroke Testing With Positioners and or Logic SolversDocumento6 paginePartial Stroke Testing With Positioners and or Logic Solversusman379Nessuna valutazione finora
- All Articles - Resources - ACM Facility Safety CanadaDocumento5 pagineAll Articles - Resources - ACM Facility Safety Canadausman379Nessuna valutazione finora
- F.S. ENG. SIS TÜV (Rheinland) Certification - IofHPDocumento8 pagineF.S. ENG. SIS TÜV (Rheinland) Certification - IofHPusman379Nessuna valutazione finora
- All Articles - Resources - ACM Facility Safety CanadaDocumento5 pagineAll Articles - Resources - ACM Facility Safety Canadausman379Nessuna valutazione finora
- Courses - IofHP Training Courses and PricesDocumento4 pagineCourses - IofHP Training Courses and Pricesusman379Nessuna valutazione finora
- Macro That Extract Video Filename, Size and Duration and List To Excel - Excel General - OzGrid Free Excel - VBA Help ForumDocumento12 pagineMacro That Extract Video Filename, Size and Duration and List To Excel - Excel General - OzGrid Free Excel - VBA Help Forumusman379Nessuna valutazione finora
- Courses - IofHP Training Courses and PricesDocumento4 pagineCourses - IofHP Training Courses and Pricesusman379Nessuna valutazione finora
- HarshaDocumento3 pagineHarshausman379Nessuna valutazione finora
- Make A List of File Names From Folder To Excel - Google SearchDocumento3 pagineMake A List of File Names From Folder To Excel - Google Searchusman379Nessuna valutazione finora
- Safeguard Maintenance Prioritization and PHA Data - Ron MukherjeeDocumento27 pagineSafeguard Maintenance Prioritization and PHA Data - Ron Mukherjeeusman379Nessuna valutazione finora
- Top 11 YouTube Playlist Downloader For 2021 (Online & Free)Documento45 pagineTop 11 YouTube Playlist Downloader For 2021 (Online & Free)usman379Nessuna valutazione finora
- Be Careful Parts of Your Document May Contain Personal Information That Con't Be Removed by Document Inspector - Google SearchDocumento3 pagineBe Careful Parts of Your Document May Contain Personal Information That Con't Be Removed by Document Inspector - Google Searchusman379Nessuna valutazione finora
- Work Shop PDFDocumento78 pagineWork Shop PDFusman379Nessuna valutazione finora
- Pai Abb White Paper tcm31-15125 PDFDocumento15 paginePai Abb White Paper tcm31-15125 PDFusman379Nessuna valutazione finora
- ABB 800XA PresentationDocumento5 pagineABB 800XA Presentationusman379Nessuna valutazione finora
- ABB 800XA PresentationDocumento5 pagineABB 800XA Presentationusman379Nessuna valutazione finora
- 800xa Structure & Pricing 031208Documento42 pagine800xa Structure & Pricing 031208usman379Nessuna valutazione finora
- ABB 800XA PresentationDocumento5 pagineABB 800XA Presentationusman379Nessuna valutazione finora
- Installation Procedure SV41 For PackageDocumento11 pagineInstallation Procedure SV41 For Packageusman379Nessuna valutazione finora
- Work Shop PDFDocumento78 pagineWork Shop PDFusman379Nessuna valutazione finora
- S800 IO System PDFDocumento2 pagineS800 IO System PDFusman379Nessuna valutazione finora
- Memo Information About The Use of S800 I/O Definition Files in SPIDocumento4 pagineMemo Information About The Use of S800 I/O Definition Files in SPIusman379Nessuna valutazione finora
- ABB IO Over View PDFDocumento6 pagineABB IO Over View PDFusman379Nessuna valutazione finora
- Entrepreneurship - Launching An Innovative Business - CourseraDocumento9 pagineEntrepreneurship - Launching An Innovative Business - Courserausman379Nessuna valutazione finora
- BYOE: Affordable and Portable Laboratory Kit For Controls CoursesDocumento9 pagineBYOE: Affordable and Portable Laboratory Kit For Controls Coursesusman379Nessuna valutazione finora
- SSPL Catalog Regular - Resize PDFDocumento25 pagineSSPL Catalog Regular - Resize PDFusman379Nessuna valutazione finora
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- AC 25.899-1 Electrical Bonding and Protection Against Static ElectricityDocumento11 pagineAC 25.899-1 Electrical Bonding and Protection Against Static ElectricitysheyunfengNessuna valutazione finora
- GeofencingDocumento3 pagineGeofencinggirishtiwaskarNessuna valutazione finora
- Parallel Port InterfacingDocumento34 pagineParallel Port InterfacingKingsprincessNessuna valutazione finora
- 002 Gaming PC Office PC Server PC AI Data Mining Research PC SystemsDocumento4 pagine002 Gaming PC Office PC Server PC AI Data Mining Research PC SystemsBizgram AsiaNessuna valutazione finora
- Netscreen Concepts and ExamplesDocumento476 pagineNetscreen Concepts and ExamplesKeshri SekhonNessuna valutazione finora
- E2E - QoS - Design - Main Ver 0.97Documento104 pagineE2E - QoS - Design - Main Ver 0.97Tshego MasegoNessuna valutazione finora
- T21 FSAE PowertrainOptimization BS ThesisDocumento171 pagineT21 FSAE PowertrainOptimization BS ThesisSayanSanyalNessuna valutazione finora
- Soc Fpga Main Memory Performance: Architecture BriefDocumento4 pagineSoc Fpga Main Memory Performance: Architecture BriefGiderosNessuna valutazione finora
- InfoSys Interview Questions For APIDocumento3 pagineInfoSys Interview Questions For APIVijjuNessuna valutazione finora
- Grounding Considerations For Large kVA Pad-Mount TransformersDocumento4 pagineGrounding Considerations For Large kVA Pad-Mount TransformersRuwan DeegayuNessuna valutazione finora
- Batangas State University College of Engineering, Architecture & Fine ArtsDocumento20 pagineBatangas State University College of Engineering, Architecture & Fine ArtsJezreel GamboaNessuna valutazione finora
- A Guide For Using PTM and The CIBANO 500 To Test Circuit Breakers in North AmericaDocumento36 pagineA Guide For Using PTM and The CIBANO 500 To Test Circuit Breakers in North AmericaargaNessuna valutazione finora
- Premier League Season Review 2020 - 21Documento9 paginePremier League Season Review 2020 - 21Iftar KhanNessuna valutazione finora
- Sam Carlton CVDocumento1 paginaSam Carlton CVsam_carlton_4Nessuna valutazione finora
- MAN4200075 Rel. 00 Luce x2 GV - GBDocumento73 pagineMAN4200075 Rel. 00 Luce x2 GV - GBGabriel Montoya CorreaNessuna valutazione finora
- OFBS Enrollment Form v.2Documento2 pagineOFBS Enrollment Form v.2Abrera ReubenNessuna valutazione finora
- 2 PagesDocumento3 pagine2 PagesJohn Manuel BautistaNessuna valutazione finora
- LC320W01 Sla1Documento33 pagineLC320W01 Sla1Robert TocaNessuna valutazione finora
- Journal of Industrial Information IntegrationDocumento18 pagineJournal of Industrial Information IntegrationGiovanni TurriNessuna valutazione finora
- 50-Article Text-90-1-10-20201130Documento10 pagine50-Article Text-90-1-10-20201130Ashih GuptaNessuna valutazione finora
- From The President's Desk: in This IssueDocumento6 pagineFrom The President's Desk: in This IssueJayant ShaligramNessuna valutazione finora
- 3161 Governor: For Control of Engines and Steam TurbinesDocumento4 pagine3161 Governor: For Control of Engines and Steam TurbinesWilliam's SalgadoNessuna valutazione finora
- Module 5Documento80 pagineModule 5Big Brown BeastNessuna valutazione finora
- Q Cells Data Sheet Q.peak Duo-G8 345-360 Global 2019-05 Rev02 enDocumento2 pagineQ Cells Data Sheet Q.peak Duo-G8 345-360 Global 2019-05 Rev02 envijayNessuna valutazione finora
- Mobile CommerceDocumento47 pagineMobile CommerceMichael DawkinsNessuna valutazione finora
- Lecture 2 - Hello World in MLDocumento49 pagineLecture 2 - Hello World in MLYi HengNessuna valutazione finora
- CTSA Technical Proposal Template 10-001Documento9 pagineCTSA Technical Proposal Template 10-001yasirtanvirNessuna valutazione finora
- 204.4118.01 DmSwitch EDD Command ReferenceDocumento247 pagine204.4118.01 DmSwitch EDD Command ReferencemoxdyNessuna valutazione finora
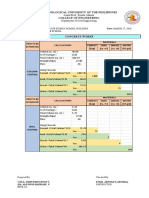
- 2 Concrete Works CompuDocumento14 pagine2 Concrete Works CompuALFONSO RAPHAEL SIANessuna valutazione finora
- Farman Ullah: PersonalDocumento3 pagineFarman Ullah: PersonalArslan ShafiNessuna valutazione finora