Potrebbero piacerti anche
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Da EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Nessuna valutazione finora
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Da EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Valutazione: 2.5 su 5 stelle2.5/5 (3)
- 110 Semiconductor Projects for the Home ConstructorDa Everand110 Semiconductor Projects for the Home ConstructorValutazione: 4 su 5 stelle4/5 (1)
- Class Prophecy 012Documento11 pagineClass Prophecy 012Mythical Persues100% (2)
- Exercises in Electronics: Operational Amplifier CircuitsDa EverandExercises in Electronics: Operational Amplifier CircuitsValutazione: 3 su 5 stelle3/5 (1)
- Projects With Microcontrollers And PICCDa EverandProjects With Microcontrollers And PICCValutazione: 5 su 5 stelle5/5 (1)
- Facebook Facing Off Againt TencentDocumento6 pagineFacebook Facing Off Againt TencentWai Shan Lee0% (1)
- Presentation For ControllerDocumento42 paginePresentation For ControllerAlakshendra JohariNessuna valutazione finora
- Coriolis - Atlas CompendiumDocumento62 pagineCoriolis - Atlas CompendiumSquamata100% (2)
- Keb Combivis 6 enDocumento232 pagineKeb Combivis 6 enhaithamNessuna valutazione finora
- Power Plant ControlDocumento42 paginePower Plant Controlsourav57% (7)
- Thermodynamics (Prausnitz) Manual SolutionDocumento195 pagineThermodynamics (Prausnitz) Manual SolutionColin Zhang78% (9)
- PACL Lodha Commette Final NOTICE of SALE With Property DetailsDocumento4 paginePACL Lodha Commette Final NOTICE of SALE With Property DetailsVivek Agrawal100% (2)
- Robust and Optimal Control-ZhouDocumento603 pagineRobust and Optimal Control-Zhouraptor0096100% (3)
- Anjan Rakshit and Amitava Chatterjee Electrical Engineering Department Jadavpur University Kolkata, IndiaDocumento40 pagineAnjan Rakshit and Amitava Chatterjee Electrical Engineering Department Jadavpur University Kolkata, IndiasouravNessuna valutazione finora
- Time - Delay - Systems - Anjan RaksitDocumento25 pagineTime - Delay - Systems - Anjan RaksitsouravNessuna valutazione finora
- 2 SystemsDocumento59 pagine2 Systemsihateuseless123Nessuna valutazione finora
- Math 5Documento37 pagineMath 5Anonymous UrzdtCB0INessuna valutazione finora
- DatasheetDocumento16 pagineDatasheetSandu VisanescuNessuna valutazione finora
- 4.voltage Mode Converter PDFDocumento17 pagine4.voltage Mode Converter PDFShufan ChanNessuna valutazione finora
- 4.voltage Mode ConverterDocumento17 pagine4.voltage Mode ConverterShufan ChanNessuna valutazione finora
- Adaptive PID With Sliding Mode Control For The Rotary InvertedDocumento6 pagineAdaptive PID With Sliding Mode Control For The Rotary InvertedImee RistikaNessuna valutazione finora
- Fast Speed IGBT with 600V Breakdown VoltageDocumento8 pagineFast Speed IGBT with 600V Breakdown VoltageLidystonPeronNessuna valutazione finora
- Closed-Loopautomatic Tuning of PID Controller For Nonlinear SystemsDocumento7 pagineClosed-Loopautomatic Tuning of PID Controller For Nonlinear SystemsVictor YuzhaninNessuna valutazione finora
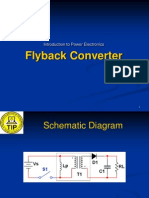
- Lesson 9 - Flyback ConverterDocumento31 pagineLesson 9 - Flyback ConverterJhana Kimberly S. AquinoNessuna valutazione finora
- Automation Exam Formula SheetDocumento10 pagineAutomation Exam Formula SheetRobert LoweNessuna valutazione finora
- Repetitive ControlDocumento22 pagineRepetitive ControlShri KulkarniNessuna valutazione finora
- DesignDocumento17 pagineDesignTushar GuptaNessuna valutazione finora
- Frequency ResponseDocumento30 pagineFrequency ResponseGovind KumarNessuna valutazione finora
- Irf 4905Documento9 pagineIrf 4905Andre Vitor DobrychtopNessuna valutazione finora
- Process ControlDocumento30 pagineProcess Controlzy_yfNessuna valutazione finora
- Aula Conversores CC-CC BásicosDocumento44 pagineAula Conversores CC-CC BásicosVirgílio TávoraNessuna valutazione finora
- Formula Sheet Final 2013 Power ElectronicsDocumento4 pagineFormula Sheet Final 2013 Power Electronicstlp56130% (1)
- Digital PID Controllers: Different Forms of PIDDocumento11 pagineDigital PID Controllers: Different Forms of PIDสหายดิว ลูกพระอาทิตย์Nessuna valutazione finora
- Submitted by Vikrant Rana CH-6276Documento30 pagineSubmitted by Vikrant Rana CH-6276vcoolkrazyNessuna valutazione finora
- Formula Overview (Aeronautics)Documento8 pagineFormula Overview (Aeronautics)Aishwarya RaviNessuna valutazione finora
- PID ControllerDocumento27 paginePID Controllerprof.hovNessuna valutazione finora
- Modeling and Control of a Buck Converter in Ansoft SimplorerDocumento25 pagineModeling and Control of a Buck Converter in Ansoft Simplorerc_u_r_s_e_dNessuna valutazione finora
- Introduction To PID Control: Lab-808: Power Electronic Systems & Chips Lab., NCTU, TaiwanDocumento32 pagineIntroduction To PID Control: Lab-808: Power Electronic Systems & Chips Lab., NCTU, TaiwandaswkNessuna valutazione finora
- Unit Iii DC ChoppersDocumento119 pagineUnit Iii DC Choppersneelam sanjeev kumarNessuna valutazione finora
- Time Delay SystemsDocumento25 pagineTime Delay SystemssumanroyalNessuna valutazione finora
- InTech-Pid Control TheoryDocumento17 pagineInTech-Pid Control TheoryAbner BezerraNessuna valutazione finora
- Project Based Learning IcsDocumento14 pagineProject Based Learning IcsAvinash YadavNessuna valutazione finora
- Chap 08 Marlin 2002Documento37 pagineChap 08 Marlin 2002Audrey Patrick KallaNessuna valutazione finora
- RL RC CircuitsDocumento29 pagineRL RC CircuitsKrishnaveni Subramani SNessuna valutazione finora
- G4BC30KD-International Rectifier PDFDocumento10 pagineG4BC30KD-International Rectifier PDFPablo AllosiaNessuna valutazione finora
- PID and Feedback Compensation Design for Control SystemsDocumento32 paginePID and Feedback Compensation Design for Control SystemsNikhil PanikkarNessuna valutazione finora
- Barometric Flow and Momentum Energy EquationsDocumento49 pagineBarometric Flow and Momentum Energy Equationsdass143143Nessuna valutazione finora
- Physics Formula UtpDocumento4 paginePhysics Formula UtpRubin TasnimNessuna valutazione finora
- Thermodynamic Relations and EquationsDocumento2 pagineThermodynamic Relations and EquationsFadi W MoussaNessuna valutazione finora
- Super Buffer Design Driving Large Capacitive Loads: Prepared byDocumento14 pagineSuper Buffer Design Driving Large Capacitive Loads: Prepared byTamil SelvanNessuna valutazione finora
- Lecture 070 - Single-Stage Frequency Response - I: (READING: GHLM - 488-504) ObjectiveDocumento6 pagineLecture 070 - Single-Stage Frequency Response - I: (READING: GHLM - 488-504) ObjectiveVan Nguyen Huu VanNessuna valutazione finora
- (UC Berkeley) Saturation and Anti-Windup StrategiesDocumento10 pagine(UC Berkeley) Saturation and Anti-Windup Strategiesdsshin_psNessuna valutazione finora
- Supplemental Data: Aero 315Documento46 pagineSupplemental Data: Aero 315joelmcramerNessuna valutazione finora
- Control Systems Engineering D227 S.A.E. Solutions Tutorial 6 - Sinusoidal Responses Self Assessment Exercise No.1Documento1 paginaControl Systems Engineering D227 S.A.E. Solutions Tutorial 6 - Sinusoidal Responses Self Assessment Exercise No.1cataiceNessuna valutazione finora
- El T I III Electronics III: - Power Dissipation in CMOS Digital Circuits - Optimization of Chain of InvertersDocumento23 pagineEl T I III Electronics III: - Power Dissipation in CMOS Digital Circuits - Optimization of Chain of InvertersSaied Aly SalamahNessuna valutazione finora
- Chapter 13Documento27 pagineChapter 13vishiwizardNessuna valutazione finora
- 365 Signal ConditioningDocumento29 pagine365 Signal ConditioningSunilkumar ReddyNessuna valutazione finora
- Parasitic Components Effect ResonantDocumento39 pagineParasitic Components Effect ResonantAhmed58seribegawanNessuna valutazione finora
- Solve Problem SlideDocumento11 pagineSolve Problem SlideBharavi K SNessuna valutazione finora
- PLCDocumento112 paginePLCsourav100% (1)
- Charting A Course For A Successful Research CareerDocumento123 pagineCharting A Course For A Successful Research CareerOmicsScienceNessuna valutazione finora
- Energy AuditDocumento145 pagineEnergy Auditparthasarothi_sikder79Nessuna valutazione finora
- Linear Variable Differential TransformerDocumento24 pagineLinear Variable Differential TransformersouravNessuna valutazione finora
- Piezoelectric Transducers - LectDocumento43 paginePiezoelectric Transducers - LectsouravNessuna valutazione finora
- Thermal AnemometryDocumento17 pagineThermal AnemometrysouravNessuna valutazione finora
- Sensor LinearizationDocumento27 pagineSensor LinearizationsouravNessuna valutazione finora
- Programmable Logic IntroductionDocumento10 pagineProgrammable Logic IntroductionJuan Carlos GonzálezNessuna valutazione finora
- Linear Variable Differential TransformerDocumento24 pagineLinear Variable Differential TransformersouravNessuna valutazione finora
- Linearization Arrangements For RTDsDocumento25 pagineLinearization Arrangements For RTDssouravNessuna valutazione finora
- Relative HumidityDocumento10 pagineRelative HumiditysouravNessuna valutazione finora
- General Measurement SystemDocumento3 pagineGeneral Measurement SystemsouravNessuna valutazione finora
- Magnetostrictive TransducersDocumento6 pagineMagnetostrictive TransducerssouravNessuna valutazione finora
- Displacement TransducersDocumento41 pagineDisplacement TransducerssouravNessuna valutazione finora
- Piezoelectric TransducersDocumento24 paginePiezoelectric TransducerssouravNessuna valutazione finora
- Network SecurityDocumento22 pagineNetwork SecuritysouravNessuna valutazione finora
- Transport Control ProtocolDocumento25 pagineTransport Control ProtocolsouravNessuna valutazione finora
- Surge Current Protection Using Super Conductors Report - NewDocumento22 pagineSurge Current Protection Using Super Conductors Report - Newsourav83% (6)
- PIC Part-B Student VersionDocumento72 paginePIC Part-B Student VersionsouravNessuna valutazione finora
- PIC Part-A Student VersionDocumento62 paginePIC Part-A Student VersionsouravNessuna valutazione finora
- Routing ProtocolsDocumento52 pagineRouting ProtocolssouravNessuna valutazione finora
- Flow ControlDocumento14 pagineFlow ControlsouravNessuna valutazione finora
- Digital Controllers - Anjan RaksitDocumento49 pagineDigital Controllers - Anjan RaksitsouravNessuna valutazione finora
- Congestion ControlDocumento20 pagineCongestion ControlsouravNessuna valutazione finora
- Final - Control - Element - Anjan RaksitDocumento61 pagineFinal - Control - Element - Anjan RaksitsouravNessuna valutazione finora
- Chapter 27 Protists I. Evolution of EukaryotesDocumento7 pagineChapter 27 Protists I. Evolution of EukaryotesNadeem IqbalNessuna valutazione finora
- REVISION OF INTEREST RATES ON DEPOSITS IN SANGAREDDYDocumento3 pagineREVISION OF INTEREST RATES ON DEPOSITS IN SANGAREDDYSRINIVASARAO JONNALANessuna valutazione finora
- Uvas CaractDocumento10 pagineUvas CaractgondeluNessuna valutazione finora
- Counter Circuit Types, Components and ApplicationsDocumento22 pagineCounter Circuit Types, Components and Applicationsnavin_barnwalNessuna valutazione finora
- Weakness and Hypotonia: Prepared by DR Hodan Jama MDDocumento38 pagineWeakness and Hypotonia: Prepared by DR Hodan Jama MDabdisalaan hassanNessuna valutazione finora
- New Microsoft Word DocumentDocumento1 paginaNew Microsoft Word Documentshubhangiw17Nessuna valutazione finora
- New Pacific Timber v. Señeris, 101 SCRA 686Documento5 pagineNew Pacific Timber v. Señeris, 101 SCRA 686Ishmael AbrahamNessuna valutazione finora
- ListDocumento4 pagineListgeralda pierrelusNessuna valutazione finora
- Blackmagic RAW Speed TestDocumento67 pagineBlackmagic RAW Speed TestLeonardo Terra CravoNessuna valutazione finora
- Teaching and Learning in the Multigrade ClassroomDocumento18 pagineTeaching and Learning in the Multigrade ClassroomMasitah Binti TaibNessuna valutazione finora
- Securifire 1000-ExtractedDocumento2 pagineSecurifire 1000-ExtractedWilkeey EstrellanesNessuna valutazione finora
- Pathophysiology of Uremic EncephalopathyDocumento5 paginePathophysiology of Uremic EncephalopathyKristen Leigh Mariano100% (1)
- Schedule For Semester III, Class of 2021Documento7 pagineSchedule For Semester III, Class of 2021Jay PatelNessuna valutazione finora
- Reasons for Conducting Qualitative ResearchDocumento12 pagineReasons for Conducting Qualitative ResearchMa. Rhona Faye MedesNessuna valutazione finora
- Candida by Shaw, George Bernard, 1856-1950Documento61 pagineCandida by Shaw, George Bernard, 1856-1950Gutenberg.orgNessuna valutazione finora
- Cross-Sectional Tomography: Oral and Maxillofacial RadiologyDocumento7 pagineCross-Sectional Tomography: Oral and Maxillofacial RadiologyPhanQuangHuyNessuna valutazione finora
- List of OperationsDocumento3 pagineList of OperationsGibs_9122100% (3)
- Youtube SrsDocumento23 pagineYoutube Srsabhinandan PandeyNessuna valutazione finora
- Chapter 63 Standard Integration: EXERCISE 256 Page 707Documento9 pagineChapter 63 Standard Integration: EXERCISE 256 Page 707Khaerul UmamNessuna valutazione finora
- Pakage PAU (Fruits)Documento70 paginePakage PAU (Fruits)Gary Bhullar57% (7)
- BSHM 23 ReviewerDocumento8 pagineBSHM 23 ReviewerTrixie Mae MuncadaNessuna valutazione finora
- Neuroimaging - Methods PDFDocumento372 pagineNeuroimaging - Methods PDFliliana lilianaNessuna valutazione finora
- BA50BCODocumento6 pagineBA50BCOpedroarlindo-1Nessuna valutazione finora
- Viviana Rodriguez: Education The University of Texas at El Paso (UTEP)Documento1 paginaViviana Rodriguez: Education The University of Texas at El Paso (UTEP)api-340240168Nessuna valutazione finora
- Berserker - Lifting Wood and Stone Like A Viking Strongman Bodybuilding Functional StrengthDocumento10 pagineBerserker - Lifting Wood and Stone Like A Viking Strongman Bodybuilding Functional Strengthluciferr71Nessuna valutazione finora