Documenti di Didattica
Documenti di Professioni
Documenti di Cultura
Arquivo Geral
Caricato da
Cleber ReisTitolo originale
Copyright
Formati disponibili
Condividi questo documento
Condividi o incorpora il documento
Hai trovato utile questo documento?
Questo contenuto è inappropriato?
Segnala questo documentoCopyright:
Formati disponibili
Arquivo Geral
Caricato da
Cleber ReisCopyright:
Formati disponibili
UNIVERSIDADE FEDERAL DE ITAJUB
INSTUTUTO DE ENGENHARIA MECNICA
PROGRAMA DE PS-GRADUAO EM ENGENHARIA MECNICA
DISSERTAO DE MESTRADO
Metodologia para Projeto Inverso Robusto de
Pers Aerodinmicos e Grades de
Turbomquinas
Autor: Cleber Juliano Braga dos Reis
Orientador: Nelson Manzanares Filho
Itajub, Maro de 2010
MG - Brasil
UNIVERSIDADE FEDERAL DE ITAJUB
INSTUTUTO DE ENGENHARIA MECNICA
PROGRAMA DE PS-GRADUAO EM ENGENHARIA MECNICA
DISSERTAO DE MESTRADO
Metodologia para Projeto Inverso Robusto de
Pers Aerodinmicos e Grades de
Turbomquinas
Autor: Cleber Juliano Braga dos Reis
Orientador: Nelson Manzanares Filho
Curso: Mestrado em Engenharia Mecnica
rea de Concentrao: Dinmica dos Fluidos e Mquinas de Fluxo
Dissertao submetida ao Programa de Ps-Graduao em Engenharia Mecnica como parte
dos requisitos para obteno do Ttulo de Mestre em Engenharia Mecnica.
Itajub, Maro de 2010
MG - Brasil
UNIVERSIDADE FEDERAL DE ITAJUB
INSTUTUTO DE ENGENHARIA MECNICA
PROGRAMA DE PS-GRADUAO EM ENGENHARIA MECNICA
DISSERTAO DE MESTRADO
Metodologia para Projeto Inverso Robusto de
Pers Aerodinmicos e Grades de
Turbomquinas
Autor: Cleber Juliano Braga dos Reis
Orientador: Nelson Manzanares Filho
Composio da Banca Examinadora
Prof. Dr. Joo Roberto Barbosa - ITA
Profa. Dra. Ana Lcia F. de Lima e Silva - IEM/UNIFEI
Prof. Dr. Waldir de Oliveira - IEM/UNIFEI
Prof. Dr. Ramiro Gustavo Ramirez Camacho - IEM/UNIFEI
Prof. Dr. Nelson Manzanares Filho (orientador) - IEM/UNIFEI
Dedicatria
A Elaine, que compartilha comigo
essa vida to curta
e cheia de mistrios . . .
Agradecimentos
Ao meu orientador, Prof. Dr. Nelson Manzanares Filho, um prossional exemplar em
seu conhecimento tcnico e losco. Mas agradeo principalmente por sua grande amizade, e
conana em mim.
Aos professores e funcionrios do departamento de engenharia mecnica, agradeo por
transformar nosso local de trabalho em um lugar intenso, onde se compartilham conhecimento
e idias.
Aos alunos Marcos Antnio, Edna, Fernanda Srio e Erik, pelo convvio no LHV, e no
ITA. Nosso tempo juntos ser sempre lembrado com saudades.
Aos meus pais, por acreditarem em mim em tudo o que sempre quis fazer e aos pais de
Elaine, por sua amizade e compreenso, e por tornarem sua famlia tambm minha.
Petrobrs, pelo apoio nanceiro.
Aos amigos de jornada, meus mais sinceros agradecimentos.
E as pessoas nem sonham que quem acaba uma coisa
nunca aquele que a comeou, mesmo que ambos
tenham um nome igual, que isso s que se mantm constante,
nada mais.
Jos Saramago, escritor.
Resumo
No projeto de pers aerodinmicos e grades de turbomquinas, perturbaes nas formas
geometricas oriundas de erros de fabricao, desgaste natural, ou deposio de materiais, podem
afetar negativamente seu desempenho, inviabilizando seu uso normal. O conceito de robustez,
compreendida como pouca sensibilidade variao dos parmetros de projeto, aplicada junto
a tcnicas de projeto aerodinmico, transformam o problema de otimizao em um problema
multiobjetivo, que visa a otimizao de objetivos conitantes (desempenho versus robustez).
O custo da otimizao elevado quando mtodos diretos de clculo so utilizados e a anlise
robusta includa. Por outro lado, os mtodos inversos possuem um custo computacional mais
baixo, pelo fato da anlise ser feita utilizando mtodos integrais para o clculo da camada-limite.
No presente trabalho, proposta uma metodologia para o projeto inverso robusto de aeroflios e
grades lineares. As curvas de coeciente de presso (ou de velocidade) para os lados de suco
e presso dos aerofolios sorepresentados utilizando parametrizaes por B-splines, tomando
os pontos de controle como as variveis de projeto. A aplicao de perturbaes aos pontos de
controle simula as perturbaes nas curvas de velocidade, tornando possvel assim uma anlise
de sensibilidade destas curvas, bem como da anlise do desempenho. Um algoritmo gentico
multiobjetivo (NSGA II) usado como otimizador, visando maximizar ambos desempenho e
robustez (ou minimizar as perdas e a sensibilidade). Aps a optimizao, um grupo de indiv-
duos da frente de Pareto resultante so invertidos (ou seja, obtida sua forma geomtrica) e a
robustez destes individuos, antes e depois da inverso, comparada. Para os exemplos apresen-
tados neste trabalho, verica-se que as distribuies de presso (velocidade) geram aerofolios e
grades lineares robustas aps o processo de inverso.
Palavras-chave: Aerodinmica, Turbomquinas, Mtodos Inversos, Projeto Robusto.
Abstract
In the design of airfoils and turbomachinery cascades, disturbances in the geometry orig-
inated from manufacturing errors, natural wear, or material deposition can negatively affect
their performance, impairing the normal use. The concept of robustness as the insensibility to
the design parameters variation applied with the aerodynamic design techniques, transform the
optimization problem into a multiobjective one, aiming for the optimization of conicting ob-
jectives (performance versus robustness). The optimization cost is high when direct methods are
used, and the robustness analysis is included. On the other hand, inverse methods have a lower
computational cost, since the analysis is made using boundary layer methods. In the present
work, a methodology for the inverse design of robust airfoils and cascades is proposed. The
pressure coefcient curves for the suction and pressure side of airfoils are represented using B-
splines parameterizations, taking the control points as design variables. Applying disturbances
to the control points simulate disturbances in the velocity curves, thus allowing for a sensibil-
ity analysis on the curves themselves, along with the performance analysis. A multiobjective
genetic algorithm (NSGA II) is used as optimization engine, in order to maximize both per-
formance and robustness (or minimize the losses and sensibility). After the optimization, a set
of individuals from the resulting Pareto front are inverted (i. e., have their geometrical shape
found), and the relative robustness of these individuals before and after the inversion is com-
pared. For the examples presented in this work, it is veried that the produced robust pressure
distributions actually generates robust airfoils and cascades after inversion.
Keywords: Aerodynamics, Turbomachinery, Inverse Methods, Robust Design.
Sumrio
Lista de Figuras v
Lista de Tabelas vii
Lista de Smbolos ix
Lista de Abreviaturas xiii
1 Introduo 1
1.1 Projeto e Otimizao - Tendncias Atuais . . . . . . . . . . . . . . . . . . . . 1
1.2 Mtodos Inversos de Projeto Aerodinmico e o Projeto Robusto . . . . . . . . 5
1.3 Objeto do Trabalho e Metodologia . . . . . . . . . . . . . . . . . . . . . . . . 6
2 Projeto Robusto e Otimizao 9
2.1 Projeto e Otimizao na Presena de Incertezas . . . . . . . . . . . . . . . . . 9
2.1.1 Classicao das Incertezas . . . . . . . . . . . . . . . . . . . . . . . 10
2.1.2 Representao das Incertezas . . . . . . . . . . . . . . . . . . . . . . . 12
2.2 Otimizao Aerodinmica e Robustez . . . . . . . . . . . . . . . . . . . . . . 16
2.3 Recapitulao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3 Curvas de Bzier e B-Splines 19
3.1 A representao paramtrica de curvas . . . . . . . . . . . . . . . . . . . . . . 19
3.2 As curvas de Bzier . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
3.3 Parametrizao por B-splines . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
3.4 Uso na Representao de Aeroflios . . . . . . . . . . . . . . . . . . . . . . . 24
3.5 Representao de Curvas de Presso e Velocidade . . . . . . . . . . . . . . . . 26
3.6 Recapitulao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
4 Escoamento em Grades 29
4.1 A Grade Aerodinmica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
4.2 Anlise Integral Bidimensional . . . . . . . . . . . . . . . . . . . . . . . . . . 30
4.2.1 Foras Atuantes nas Ps . . . . . . . . . . . . . . . . . . . . . . . . . 31
4.2.2 Perdas de Energia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
4.2.3 Circulao e o Teorema de Kutta-Joukowsky . . . . . . . . . . . . . . 35
4.2.4 Sustentao e Arrasto . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
4.3 A Camada-Limite . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
4.4 A Ecincia da Grade . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
4.5 Recapitulao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
i
ii Sumrio
5 Algoritmos Genticos de Otimizao 47
5.1 Introduo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
5.2 GAs: Heurstica do Mtodo . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
5.3 Operadores de Populao nos GAs . . . . . . . . . . . . . . . . . . . . . . . . 49
5.4 Critrios de Parada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
5.5 Algoritmos Genticos Multiobjetivo . . . . . . . . . . . . . . . . . . . . . . . 53
5.6 O Algoritmo NSGA II . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
5.7 Recapitulao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
6 Metodologia Proposta 59
6.1 Denio do Problema - A Grade de Base . . . . . . . . . . . . . . . . . . . . 59
6.2 Distribuio de Velocidades sobre a Grade: Gerao da Populao Inicial . . . 60
6.3 Funo Objetivo: Quanticao do Desempenho dos Indivduos . . . . . . . . 65
6.3.1 ngulos do Escoamento . . . . . . . . . . . . . . . . . . . . . . . . . 65
6.3.2 Clculo da Camada-lLimite . . . . . . . . . . . . . . . . . . . . . . . 66
6.3.3 Teste do Procedimento de Clculo . . . . . . . . . . . . . . . . . . . . 68
6.4 Penalizao dos Objetivos . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
6.5 O Problema Inverso da Grade . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
6.6 Fluxograma da Metodologia de Clculo . . . . . . . . . . . . . . . . . . . . . 71
6.7 Implementao Computacional . . . . . . . . . . . . . . . . . . . . . . . . . . 76
6.8 Recapitulao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
7 Exemplos de Aplicao da Metodologia 77
7.1 Aeroflio Isolado - NACA 65
1
412 . . . . . . . . . . . . . . . . . . . . . . . . 77
7.1.1 Denio do Problema . . . . . . . . . . . . . . . . . . . . . . . . . . 79
7.1.2 Otimizao do Aeroflio Isolado . . . . . . . . . . . . . . . . . . . . . 80
7.2 Grade Geradora - Aeroflio NACA 65
1
810 . . . . . . . . . . . . . . . . . . . 83
7.2.1 Denio do Problema . . . . . . . . . . . . . . . . . . . . . . . . . . 86
7.2.2 Otimizao da Grade Difusora . . . . . . . . . . . . . . . . . . . . . . 88
7.3 Grade Motora - Perl Primrio de Turbina . . . . . . . . . . . . . . . . . . . . 93
7.3.1 Denio do Problema . . . . . . . . . . . . . . . . . . . . . . . . . . 94
7.3.2 Otimizao da Grade Motora . . . . . . . . . . . . . . . . . . . . . . . 96
7.4 Recapitulao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
8 Concluses e Sugestes para Trabalhos Futuros 101
8.1 Diversos Aspectos da Metodologia . . . . . . . . . . . . . . . . . . . . . . . . 102
8.1.1 B-splines para Parametrizao de Curvas . . . . . . . . . . . . . . . . 102
8.1.2 Modelos Integrais de Camada-limite . . . . . . . . . . . . . . . . . . . 103
8.1.3 Caracterizao das Incertezas . . . . . . . . . . . . . . . . . . . . . . 103
8.1.4 Aplicao das Perturbaes . . . . . . . . . . . . . . . . . . . . . . . 104
8.1.5 A Caracterizao da Robustez . . . . . . . . . . . . . . . . . . . . . . 104
Sumrio iii
8.1.6 A Inverso da Distribuies de Velocidades em Formas Geomtricas . . 105
8.1.7 Extenso para Clculo Tridimensional . . . . . . . . . . . . . . . . . . 105
8.2 Resumo das Concluses e Propostas Futuras . . . . . . . . . . . . . . . . . . . 106
8.3 Consideraes Finais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
Referncias Bibliogrcas 109
iv Sumrio
Lista de Figuras
1.1 Desgaste natural de uma p de turbina. Retirado de Keane e Nair (2005). . . . . 3
1.2 Otimizao de sistemas na presena de incertezas nas entradas. . . . . . . . . . 4
3.1 Polinmios de Bernstein para n = 4. . . . . . . . . . . . . . . . . . . . . . . . 21
3.2 Curva de Bzier e pontos de controle. . . . . . . . . . . . . . . . . . . . . . . 21
3.3 B-splines formadas alterando 1 ponto de controle. . . . . . . . . . . . . . . . . 23
3.4 Comparao entre a curva Bzier e a B-spline de ordem k = 3. . . . . . . . . . 24
3.5 Curvas Bzier representando o aeroflio NACA 2412. . . . . . . . . . . . . . . 25
3.6 Representao de um aeroflio por meio das linhas de arqueamento e espessura. 26
3.7 Velocidade em torno do perl NACA 2412, representada por B-splines ( =
6
). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
4.1 Rotor de turbomquina geradora, e uma grade de ps associada. . . . . . . . . 30
4.2 Foras e velocidades na grade (Schlichting e Scholz, 1951). . . . . . . . . . . . 32
4.3 Velocidades e foras de reao para grades. De Schlichting e Scholz (1951). . . 38
4.4 Esquema da camada-limite . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
4.5 Escoamento na sada da grade, e desenvolvimento da camada-limite. . . . . . . 40
5.1 Fluxograma bsico de um algoritmo gentico (Sivanandam e Deepa, 2008). . . 48
5.2 Representao do gentipo e fentipo do vetor de parmetros de projeto x. . . . 50
5.3 Cruzamento e mutao na gerao dos descendentes no GA. . . . . . . . . . . 51
5.4 Tcnicas otimizao multiobjetivo, por pesos (a) e restries (b). . . . . . . . . 54
5.5 Frentes de Pareto para combinaes de dois objetivos. De Deb (2001). . . . . . 55
5.6 Classicao pelo NSGA II. De Deb (2001). . . . . . . . . . . . . . . . . . . . 56
5.7 Medida da distncia de povamento de um indivduo. De Deb et al. (2002). . . . 56
6.1 Distribuio de presso em uma grade de turbina. . . . . . . . . . . . . . . . . 61
6.2 Faixa de variao de velocidade permitida para o otimizador. . . . . . . . . . . 62
6.3 Aeroflio NACA 65
1
412 com perturbaes de forma e incidncia. . . . . . . . 63
6.4 Distribuio de velocidades em torno do perl NACA 65
1
412 (para = 2). . . 64
6.5 Procedimento de clculo aplicado em uma grade geradora. . . . . . . . . . . . 68
6.6 Procedimento aplicado em uma grade motora. . . . . . . . . . . . . . . . . . . 69
6.7 Fluxograma do procedimento de otimizao. . . . . . . . . . . . . . . . . . . . 74
v
vi Lista de Figuras
6.8 Fluxograma do procedimento de clculo dos objetivos. . . . . . . . . . . . . . 75
7.1 Comparao entre os resultados do modelo e dados experimentais. . . . . . . . 78
7.2 Velocidades em torno do perl de base, e faixas permitidas ao otimizador. . . . 79
7.3 Frente de Pareto para a otimizao de um aeroflio isolado. . . . . . . . . . . . 81
7.4 Curvas de velocidade e geometria para os aeroflios A1, B1, C1 e D1. . . . . . 83
7.5 Comparao da geometria (escala aumentada). Aeroflios de base, A1 e C1. . . 84
7.6 Robustez perturbao da forma dos aeroflios otimizados e de base. . . . . . 85
7.7 Robustez perturbao da incidncia para os aeroflios otimizados e o de base. 85
7.8 Comparao entre NACA 65
1
412 e aeroflio otimizado C1. . . . . . . . . . . . 86
7.9 Frente de Pareto obtida aps a otimizao para grades geradoras. . . . . . . . . 88
7.10 Pers de velocidade para as grades selecionadas da frente de Pareto. . . . . . . 89
7.11 Comparao dos pers de velocidade entre a grade de base e a grade A. . . . . 90
7.12 Pers gerados com a otimizao de grades geradoras. . . . . . . . . . . . . . . 91
7.13 Comparao dos pers de grade gerados e de base, escala ampliada. . . . . . . 92
7.14 Comparao da robustez relativa entre as grades de base e otimizadas. . . . . . 93
7.15 Caractersticas operacionais das grades de base e otimizadas. . . . . . . . . . . 93
7.16 Perl Primrio NACA, arqueamento
c
=65
, espessura mxima 0,1c. . . . . . 94
7.17 Velocidade e faixas de variao para grade de turbina selecionada. . . . . . . . 95
7.18 Frente de Pareto para a otimizao da grade motora. . . . . . . . . . . . . . . . 96
7.19 Pers otimizados para grade motora. . . . . . . . . . . . . . . . . . . . . . . . 97
7.20 Pers expandidos, grades motoras. . . . . . . . . . . . . . . . . . . . . . . . . 98
7.21 Comparao da robustez entre as grades otimizadas, e de base. . . . . . . . . . 99
7.22 Geometrias perturbadas para o aeroflio C. . . . . . . . . . . . . . . . . . . . 99
Lista de Tabelas
7.1 Faixas de variao dos pers de velocidade, aeroflio isolado. . . . . . . . . . 81
7.2 Aeroflio de Base, e aeroflios otimizados. . . . . . . . . . . . . . . . . . . . 82
7.3 Faixas de variao dos pers de velocidade para a grade geradora. . . . . . . . 87
7.4 Caractersticas da grade de base e das grades geradoras selecionadas. . . . . . . 89
7.5 Faixas de variao dos pers de velocidade para a grade motora . . . . . . . . 96
7.6 Caractersticas da grade de base, e das grades selecionadas, grades motoras . . 97
vii
viii Lista de Tabelas
Lista de Smbolos
Smbolos Latinos
A,B,C e D - Tipos de incertezas
a - Coecientes da curva de arqueamento
b - Coecientes da curva de espessura
B - Polinmios de Bernstein
c - Corda do aeroflio
C - Curva no plano, do tipo C(x, y)
C - Coeciente aerodinmico
D - Fora de arrasto
e - Comprimento da grade na direo axial
E - Expectncia (operador) f - Funo, do tipo f = f(a, b, . . .)
F - Fora (vetor), de componentes F
x
, F
y
F - Momentos estatsticos de f
g - Funo, do tipo g = g(a, b, . . .); acelerao gravitacional
g - Aceleraes de corpo
h - Altura geodsica, em relao a um referencial xo
k - Ordem da B-spline; nmero de sub-indivduos
L - Fora de sustentao
n - Nmero de pontos de controle
n - Vetor unitrio normal superfcie de controle
N - Polinmios de base da B-spline; Nmero de indivduos de uma sub-populao
p - Presso esttica no uido; peso das funes objetivo
q - Presso dinmica do uido
p - Funo de densidade de probabilidade
P - Populao em uma iterao do algoritmo gentico
P - Vetor de pontos de controle
Q - Indivduos gerados em uma iterao do algoritmo gentico
r - Peso aleatrio
s - Espaamento entre ps na grade; comprimento molhado sobre os pers
ix
x Lista de Smbolos
S - Espao de solues
t - Espessura do aeroflio; parmetro das curvas Bzier e B-spline
Var - Varincia (operador)
w - Velocidade em relao grade ou perl isolado (de componentes w
a
, w
y
...)
x - Parmetros de projeto; curva paramtrica x(t)
x - Vetor de parmetros de projeto
y - Curva paramtrica y(t)
y - Funo de desempenho
Y - Trabalho especco
Z - Perda especca
Smbolos Gregos
- ngulo de incidncia
- ngulos do escoamento a montante e a jusante da grade (indexado); ngulo de montagem da
grade. Estes ngulos so medidos em relao direo axial.
- Circulao em uma p
- Perturbao dos parmetros de projeto; coeciente de deexo
- Parcelas da espessura de deslocamento
- Diferena entre parmetros
- Espessura de deslocamento
- Razo de planeio; perturbao aplicada; erro de diferenciao numrica
- Coeciente de perda de presso em relao velocidade na direo axial
- Ecincia da grade
- ngulo de arqueamento da p
- Espessura de quantidade de movimento
- Parcelas da espessura de quantidade de movimento
- Perturbaes do sistema
- Densidade
- Razo de solidez; desvio padro
- Coeciente de vazo
- relao entre os ngulos do escoamento ideal e real, a jusante da grade
- Coeciente de presso
- Coeciente de perda de presso em relao velocidade entrada da grade
xi
ndices
1, 2 - Referentes a montante e a jusante da grade, respectivamente
a - Direo axial
B - Bomba
c - Linha de arqueamento
D - Arrasto
i, j - Indexadores numricos
id - Escoamento ideal
L - Sustentao
p - Referente ao lado de presso do perl; presso
s - Referente ao lado de suco do perl
Sep - Ponto de separao sobre os dorsos do aeroflio
t - No. da iterao do algoritmo gentico
T - Turbina
te - Pertinente ao bordo de fuga de um perl aerodinmico
u - Referente grade normalizada (unitrio)
v - Referente a perdas (presso, trabalho especco)
x, y - Direes do referencial plano
- Direo mdia do escoamento entre montante e jusante grade
xii Lista de Smbolos
Lista de Abreviaturas
CDA Controlled Difusion Airfoil
CFD Computational Fluid Dynamics
CRS Controlled Random Search
DLL Dynamic Library Linking
MEX Matlab Executable
NACA National Advisory Committee for Aeronautics
NURBS Non-Uniform Rational B-Splines
NLF Natural Laminar Flow
NSGA Non-Dominated Sorting Genetic Algorithm
PCA Principal Component Analysis
RANS Reynolds Averaged Navier Stokes
xiii
xiv Lista de Abreviaturas
Captulo 1
Introduo
1.1 Projeto e Otimizao - Tendncias Atuais
O advento dos computadores digitais causou uma grande mudana na maneira de enfo-
car os problemas de engenharia, de modo que estes passaram a ser vistos pela tica da nova
ferramenta. Esta mudana de enfoque trouxe consigo grandes desenvolvimentos em todas as
reas do projeto de um produto, desde sua fase inicial (estudos nanceiros, e ante-projeto), at o
comissionamento, ou insero na sociedade. Mtodos de clculo e anlises, anteriormente im-
pensveis por seu elevado custo, tanto computacional quanto experimental, puderam ser imple-
mentados na forma de procedimentos numricos de simulao, tornando mais acessveis ao pro-
jetista as estimativas do comportamento real de um produto ou equipamento. Um exemplo disso
a anlise de escoamentos utilizando as ferramentas da mecnica de uidos computacional,
ou CFD
1
. Os aeroflios modernos, com altos valores de sustentao, para baixos nmeros de
Reynolds, ou os de escoamento laminar natural
2
, e, para turbomquinas, os aeroflios com di-
fuso controlada CDA
3
, foram todos obtidos com o uso intensivo dos computadores digitais
(Cebeci et al., 2005).
Os progressos na rea de simulao so inegveis. Isto tambm verdade para as tc-
nicas de otimizao. Apesar de as idias fundamentais terem se originado dos trabalhos de
Bernoulli, Euler, Lagrange, Cauchy, entre outros, apenas aps a metade do sculo XX as tc-
nicas de otimizao puderam ser desenvolvidas mais a fundo, at se tornarem populares como
ferramentas de engenharia (Rao, 1996).
Este aumento da capacidade de processamento de informaes se reetiu no nvel de
complexidade dos problemas tratados. Segundo Venkataraman e Hafka (Keane e Nair, 2005),
esta complexidade pode ser analisada na forma de trs eixos distintos: complexidade de mod-
1
Sigla do ingls Computational Fluid Dynamics.
2
Os modernos NLF, ou Natural Laminar Flow.
3
Do ingls Controlled Difusion Airfoil.
1
2 Captulo 1. Introduo
elamento, de anlise e de otimizao. A complexidade de modelamento se relaciona ao grau
de realismo do modelo adotado. Por exemplo, a escolha de modelos uni, bi ou tridimensionais
depende da riqueza de detalhes necessria. As ferramentas de anlise so a segunda forma de
complexidade. A anlise utilizando um modelo de escoamento potencial ou utilizando um re-
solvedor
4
para RANS
5
um exemplo de escolha de nvel de complexidade de anlise. A com-
plexidade de otimizao se refere s tcnicas e procedimentos adotados na busca de solues
timas: escolha de procedimentos do tipo mono-objetivo, multi-objetivo, multidisciplinares ou
no, ou da escolha das variveis de interesse, a incluso ou no da anlise de sensibilidade
do modelo, entre outros. O fato que a complexidade utilizada na abordagem dos problemas
avanou no mesmo passo da capacidade de processamento.
Uma maior complexidade, quando vista sob a tica dos processos de otimizao, muitas
vezes essencial para a obteno de resultados conveis. A otimizao de equipamentos e/ou
processos para pontos de operao especcos ou formas timas, sem levar em considerao a
variabilidade natural dos parmetros de projeto, condies ambientais, faixa de aplicao, pode
levar a resultados no utilizveis na prtica. Foi visto por Huyse e Lewis (2001) e Li et al.
(2002) que o resultado de otimizaes de aeroflios, tendo por base a liberdade total das for-
mas geomtricas, para pontos operacionais isolados (naqueles trabalhos, apenas um valor para
o nmero de Mach de operao), leva obteno de aeroflios com oscilaes de formato in-
aceitveis. Estas oscilaes so causadas pela tentativa do otimizador de explorar os efeitos
fsicos da transio e choque apenas no ponto operacional indicado, resultando em caractersti-
cas operacionais sofrveis fora de sua condio de projeto. Um outro exemplo da necessidade
de se considerar outros fatores na escolha da forma tima a questo do desgaste natural do
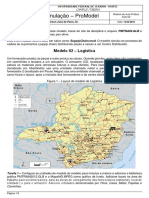
equipamento. Como pode ser visto na Figura 1.1, o desgaste natural por uso do equipamento
pode levar a alteraes geomtricas que, por sua vez, tendem a causar perdas acentuadas e in-
aceitveis de ecincia ou resistncia. No caso das turbomquinas, estes efeitos poderiam ser
minorados pela adoo de uma forma geomtrica para o perl que, desde seu projeto, leve em
considerao os efeitos do desgaste natural, ou incrustao de material, durante a vida til do
equipamento.
A considerao destes efeitos de variao de condies a que est sujeito o equipamento
leva ao conceito de projeto robusto. Ainda citando os trabalhos de Huyse e Lewis (2001) e Li
et al. (2002), este conceito foi aplicado otimizao de pers aerodinmicos para a obteno
de formas de mnimo arrasto e mximo valor para o nmero de Mach de divergncia
6
. Os
aeroflios produzidos por esta tcnica de otimizao foram considerados robustos no sentido
de possurem pouca sensibilidade s variaes das condies operacionais a que porventura
estivessem sujeitos.
4
Traduo literal de solver, comum no jargo de mecnica computacional.
5
Sigla em ingls para Reynolds Averaged Navier Stokes.
6
Mach para o qual o arrasto de onda passa a aumentar com caractersticas exponenciais.
1.1. Projeto e Otimizao - Tendncias Atuais 3
Figura 1.1: Desgaste natural de uma p de turbina. Retirado de Keane e Nair (2005).
O conceito de robustez pode ser, ainda segundo Huyse e Lewis (2001), enunciado de
diversas maneiras: como a minimizao da variabilidade do desempenho ante a incerteza das
variveis de projeto, a minimizao dos efeitos negativos do pior desempenho para a faixa de
variao, ou maximizao do desempenho geral para os vrios pontos operacionais do sistema
otimizado. Cada um desses enfoques dado robustez de um equipamento ou processo conduz
a diferentes mtricas de desempenho, mas todas com uma caracterstica comum: a diminuio
dos efeitos da variabilidade nos parmetros de projeto sobre o desempenho do sistema.
As idias acerca desta nuance do projeto partiram de anlises inicialmente feitas por
Genichi Taguchi, variabilidade dos parmetros de projeto (Yang e El-Haik, 2009). Essa vari-
abilidade pode ser encarada como um rudo que adicionado ao sistema de diversas formas:
como tolerncias de fabricao incapazes de serem reduzidas por questes de custo, condies
ambientais de temperatura e umidade inuindo nas condies de operao, eroso ou des-
gaste pelo uso normal alterando o comportamento do sistema projetado. Segundo Taguchi,
. . . Robustez indica que caractersticas funcionais do produto no so sensveis s variaes
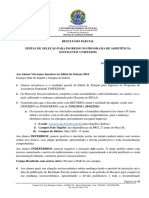
causadas por esses mesmos fatores (Taguchi et al., 1990). Na Figura 1.2, os fatores de in-
uncia sobre o desempenho de um sistma sofrem sistematicamente os efeitos de variabilidade
em seus valores, e, seguindo a lgica anteriormente expressa, o sistema considerado to mais
robusto quanto maior for sua insensibilidade essa variabilidade.
Segundo Yang e El-Haik (2009), o tratamento das incertezas sobre as variveis de projeto
4 Captulo 1. Introduo
Figura 1.2: Otimizao de sistemas na presena de incertezas nas entradas.
pode ser feito de 4 maneiras:
1. Ignorar os efeitos das incertezas: a soluo trivial, que no auxilia na resoluo dos
problemas.
2. Controlar ou eliminar as incertezas: Corresponde a estreitar a faixa de tolerncias permis-
sveis fabricao, ou aumentar o controle sobre as condies ambientais de operao.
uma alternativa de alto custo: por exemplo, o uso de aquecedores no bordo de ataque
de asas de aeronaves a m de eliminar a crosta de gelo acumulada. Tambm pode ser
impraticvel.
3. Compensar o efeito das incertezas: A utilizao de controle realimentado, ou adaptativo
sobre o sistema.
4. Minimizar o efeito das incertezas: Equivale a escolher o conjunto de parmetros de pro-
jeto que resultem no desempenho menos sensvel ao rudo dos parmetros e condies
ambientais.
Claramente, a quarta alternativa oferece a melhor relao custo/benefcio e a alternativa de
opo na maior parte dos projetos. Porm, a ligao entre as modernas tcnicas de projeto
timo e o projeto robusto leva a custos computacionais extremamente elevados. Apesar da
queda vertiginosa dos custos de simulao numrica, a anlise de robustez ainda computa-
cionalmente proibitiva em muitos problemas prticos. A investigao do comportamento de
1.2. Mtodos Inversos de Projeto Aerodinmico e o Projeto Robusto 5
um sistema ou equipamento com a presena de incertezas requer um mapeamento da faixa de
operao desejada, seja por meio de tcnicas de projeto de experimentos, como utilizado por
Taguchi (op. cit.), seja por meio de anlises probabilsticas da variabilidade dos parmetros de
inuncia sobre o sistema, ou tcnicas de Monte Carlo. Todas necessitam de um maior nmero
de avaliaes do modelo computacional do sistema, que , no raras vezes, extremamente caro.
H indcios de que a otimizao por meio de algoritmos genticos por si s j produza
resultados naturalmente robustos. Heuristicamente, o agente de mutao pode ser encarado
como um teste de robustez, ou seja, um rudo adicionado ao fentipo (as variveis de projeto)
de um indivduo aps o cruzamento. Porm, a investigao dessa armao ainda no foi
bem estabelecida (Beyer e Sendhoff, 2007), no podendo assim ser considerada vlida neste
momento.
1.2 Mtodos Inversos de Projeto Aerodinmico e o Pro-
jeto Robusto
O projeto aerodinmico de pers de asa, ou de grades de ps para turbomquinas, pode
ser feito de dois modos distintos: utilizando mtodos diretos, nos quais a geometria especi-
cada a priori e ento as caractersticas da forma aerodinmica so calculadas, ou utilizando
mtodos inversos, onde as propriedades aerodinmicas desejadas pelo projetista so especi-
cadas e a geometria que produz estas propriedades encontrada por meio de um procedimento
de otimizao. Neste segundo mtodo, as caractersticas de sustentao e arrasto so estimadas
por meio da distribuio de velocidades especicada, utilizando a teoria dos pers delgados e
mtodos integrais para o estudo do desenvolvimento da camada-limite ao redor do aeroflio.
Sua vantagem, quando utilizado em processos de otimizao, que o custo computacional
de avaliao do desempenho de uma distribuio de velocidades extremamente baixo se com-
parada ao de ummtodo direto de clculo. Por sua vez, isso permite a sua utilizao emmtodos
de otimizao populacional sem maiores restries. Alm disso, devido a seu baixo custo, estes
mtodos permitem que mais avaliaes do desempenho possam ser feitas em torno do ponto
central dos parmetros de projeto, possibilitando dessa forma a anlise de sua robustez. H
tambm desvantagens associadas aos mtodos inversos. O desconhecimento do comprimento
exato da superfcie molhada do aeroflio pode causar erro no clculo da espessura da camada-
limite; e a sustentao do aeroflio, ou desvio da grade, tambm dependente da integrao da
distribuio de presses no contorno ainda desconhecido da superfcie do perl. Estas fontes
de erro podem ser minimizadas iniciando o processo de otimizao de um ponto determinado,
ou seja, uma forma aerodinmica de base, normalmente prxima da forma que se deseja obter.
Tambm pode ser usada a teoria dos pers delgados a m de se obterem frmulas mais simples
para estimar a espessura mxima do perl, somente sendo conhecida a distribuio de presses
6 Captulo 1. Introduo
em seu contorno, como visto no trabalho de Obayashi e Takanashi (1996), ou para estimar o raio
de curvatura do bordo de ataque
7
. No sero vistos aqui, porm, detalhes do desenvolvimento
deste formulrio.
Heuristicamente, a idia de que distribuies robustas de presso (velocidade) pro-
duzam, ou sejam oriundas, de geometrias tambm robustas, muito atraente. Entretanto, a
totalidade dos trabalhos encontrados sobre o assunto utiliza mtodos diretos para a avaliao da
sensibilidade das geometrias de aeroflios. Devido aos elevados custos computacionais, muitas
vezes recorre-se ao uso de metamodelos para avaliar o desempenho fora do ponto de projeto.
No foram encontradas informaes a respeito do uso de mtodos inversos para o projeto ro-
busto de formas aerodinmicas, apesar de serem uma alternativa aos mtodos diretos.
Visto que h uma decincia de informaes sobre o uso de mtodos inversos no pro-
jeto robusto aerodinmico, o presente trabalho objetiva auxiliar no preenchimento desta lacuna
nas metodologias de otimizao aerodinmica. Ou seja, a vericao da possibilidade de que
distribuies robustas de presso (velocidade) originem formas geomtricas tambm robustas
e vice-versa. Especicamente, este trabalho visa a aplicao das tcnicas de projeto robusto
otimizao de grades aerodinmicas utilizando mtodos inversos.
1.3 Objeto do Trabalho e Metodologia
O princpio que norteia este trabalho o de que geometrias robustas produzem dis-
tribuies robustas de velocidade em seu contorno. Cabe dizer aqui que, neste trabalho, ro-
bustez se refere pouca sensibilidade do desempenho da grade, ou asa isolada, a perturbaes
de sua geometria. Assim, com a otimizao de distribuies de velocidade tendo por objetivos o
mximo desempenho e a sua menor variabilidade, espera-se obter tambm formas geomtricas
de alto desempenho e, ao mesmo tempo, mais robustas. O conceito de robustez aplicado ao
projeto ser mais detalhado no Captulo 2.
Para otimizao aerodinmica em si, vrios mtodos esto disposio do projetista.
Tcnicas de gradiente so relativamente comuns e tm sido bastante utilizadas em problemas
de aerodinmica. Entretanto, o timo obtido somente garantido como sendo o timo global
se o domnio convexo e as restries so diferenciveis prtica, estes requisitos so difceis de
se garantir. Por outro lado, algoritmos de otimizao populacionais podem propiciar uma busca
mais ampla pelo espao de solues, aumentando assim a chance de convergncia em torno do
timo global. Neste aspecto, os algoritmos genticos tm recebido bastante ateno no campo
de otimizao em engenharia.
7
A teoria bsica que possibilita o desenvolvimento deste formulrio para aeroflios isoladas pode ser encon-
trada no trabalho de Katz e Plotkin (1991), e para grades de turbomquinas (com maior complexidade), em Fer-
nandes (1978)
1.3. Objeto do Trabalho e Metodologia 7
Os algoritmos genticos imitam os processos de seleo natural dos indivduos mais ap-
tos, e uma populao inicial evolui na direo de uma soluo tima do problema, por meio
do cruzamento, mutao e seleo dos melhores indivduos em detrimento dos de pior desem-
penho. A simplicidade desta idia um dos fatores que ajudaram a popularizar os algoritmos
genticos, porm os principais motivos so a ecincia na busca de solues em espaos de-
scontnuos, a capacidade de escapar de timos locais, a facilidade de paralelizao das rotinas
computacionais, entre outros. Porm, h tambm desvantagens. A existncia de uma populao
e a avaliao de cada indivduo desta populao a cada gerao torna os algoritmos genticos ex-
tremamente caros computacionalmente, ainda mais se for adicionada a anlise de robustez dos
indivduos. Neste caso, a vantagem associada aos mtodos inversos de projeto aerodinmico,
quanto a seu baixo custo computacional, possibilita utilizar os algoritmos genticos na otimiza-
o de pers aerodinmicos e grades robustas. Por isso neste trabalho optou-se por adot-los.
Detalhes da teoria e utilizao dos algoritmos genticos, com nfase ao algoritmo multiobjetivo
NSGA II, sero vistos no Captulo 5.
As variveis de projeto, que diferenciam os indivduos da populao entre si, so as curvas
de distribuio de velocidade sobre sua superfcie molhada, alm de, para grades, sua Solidez
8
.
Para a representao da distribuio de velocidades desejvel que, de maneira similar da ge-
ometria de aeroflios, umpequeno nmero de variveis seja capaz de representar comdelidade
o maior nmero possvel de curvas dentro da faixa de variao que lhes permitida. De maneira
similar a Obayashi e Takanashi (1996), so utilizadas as curvas B-splines na parametrizao das
distribuies de velocidade. Sua exibilidade, caractersticas de continuidade e suavidade, fa-
cilidade de clculo e disponibilidade, ditaram a opo por este modo de representao. As
caractersticas das curvas de Bzier e B-splines sero discutidas no Captulo 3.
Comas curvas de velocidade dos lados de suco e presso do aeroflio, podemser aprox-
imados os valores de sustentao e deexo do escoamento, pelo Teorema de Kutta-Joukowsky.
Para o clculo do arrasto e demais caractersticas da camada-limite, foi utilizado um mtodo
integral de clculo da camada laminar e turbulenta, com transio estimada por correlaes
empricas. A anlise da grade utilizando as equaes integrais da quantidade de movimento
e da continuidade atravs de um volume de controle so o elo de ligao entre o desenvolvi-
mento da camada viscosa sobre a superfcie do aeroflio e as foras exercidas pela p sobre o
uido em escoamento. O desenvolvimento da base terica para anlise das grades mostrado
no Captulo 4. A metodologia de clculo do desempenho de uma grade robusta , nalmente,
desenvolvida em detalhes no Captulo 6. Os resultados obtidos e a vericao da robustez das
grades selecionadas aps a otimizao sero vistos no Captulo 7.
Finalmente, no Captulo 8, as concluses do trabalho sero abordadas, bem como as sug-
estes para trabalhos futuros e possveis direes para pesquisa.
8
A ser denida no Captulo 4.
8 Captulo 1. Introduo
Captulo 2
Projeto Robusto e Otimizao
As tcnicas de projeto robusto tiveram seu desenvolvimento inicial com Genichi Taguchi,
e so hoje largamente utilizadas no campo da otimizao (Yang e El-Haik, 2009). Neste cap-
tulo sero abordados os conceitos de robustez e de projeto robusto. Sero discutidas tambm
maneiras de quanticar a robustez de modo a tornar este conceito aplicvel, em termos prticos,
aos problemas de otimizao aerodinmica.
2.1 Projeto e Otimizao na Presena de Incertezas
Variaes de condies so inerentes ao nosso quotidiano. Temperaturas e umidade se
alteram ao longo do dia. Aeroflios de mesmas dimenses nominais e fabricados pelo mesmo
processo possuem diferentes tamanhos e medidas quando vericados um a um, alm de tambm
apresentarem alteraes na homogeneidade do material de que so constitudos. A composio
e propriedades de leos lubricantes se modicam durante sua vida til. Produtos e processos
sofrem os efeitos dessas variaes. Estes so exemplos de alguns dos muitos fatores que inuem
no comportamento de equipamentos ou processos e cujo controle no possvel, ou apresenta
custos demasiadamente elevados.
Pode-se dividir os fatores que inuenciam um sistema em dois grupos: fatores de cont-
role
1
, que o projetista do sistema controla livremente, e o rudo, cujo controle de alto custo
ou impossvel. Seja x = [x
1
, x
2
, . . . , x
p
] o vetor de fatores de controle que produzem valores
desejados de desempenho y = [y
1
, y
2
, . . . , y
q
]. Variaes nos valores de x, ou nas condies am-
bientais = [
1
,
2
, . . . ,
l
] tambm iro inuir em y. Ser denominado = [
1
,
2
, . . . ,
n
]
o vetor de perturbaes (rudo) que agem sobre sistema, alterando os valores de y. A funo
de transferncia f capaz de representar os valores de y em funo dos parmetros e das pertur-
1
Tambm so encontradas as denominaes parmetros de projeto ou variveis de processo
9
10 Captulo 2. Projeto Robusto e Otimizao
baes, pode ser escrita como:
y = f(x, , ) (2.1)
Durante as fases do projeto convencional, o mais comum que sejam utilizados apenas
os valores nominais de x e para se estimar y, ou seja, y = f(x, ). A parecela tratada
por meio de coecientes de segurana C
s
, cujos valores dependem do quanto se conhece sobre
o comportamento do sistema analizado e de sua sensibilidade s variaes , do conhecimento
dos valores mais provveis assumidos por , de fatores econmicos, fatores psicolgicos, da
legislao, entre outros. Seu uso , normalmente, baseado na experincia prtica, ou seja, no
aumento do conhecimento sobre o comportamento do sistema e sobre . Porm, em sistemas
para os quais ainda no se possui uma quantidade suciente de informaes sobre seu com-
portamento diante de incertezas, o uso de valores arbitrariamente elevados de C
s
pode tornar o
projeto invivel. Toma-se como exemplo o aumento de peso em aeronaves devido incertezas
no carregamento estrutural e ao consequente superdimensionamento das estruturas. Ainda, em
projetos altamente otimizados, normalmente os valores de x podem estar prximos de uma
fronteira, ou seja, de uma restrio. Variaes nos fatores de controle denidos na fase de
otimizao, causadas pelos rudos, podem afetar a performance ou violar as restries impostas
a priori. Desse modo, necessria uma adequao das tcnicas de projeto e otimizao para o
caso em que as incertezas ou rudos que agem sobre o sistema tm inuncia determinante em
seu desempenho.
Keane e Nair (2005) delinearam o procedimento a ser seguido no caso de otimizao na
presena de incertezas:
1. Identicao, modelamento e representao de incertezas nummodelo matemtico (prob-
abilstico ou no);
2. Propagao de incertezas do modelo ou dos processos computacionais, e quanticao
de seu impacto nas sadas;
3. Formulao e soluo do problema.
Este procedimento ser visto em mais detalhes no que segue.
2.1.1 Classicao das Incertezas
Pode-se classicar as incertezas de vrias maneiras. A primeira delas pode ser quanto
sua origem: podemos dizer que as incertezas so aleatrias ou epistmicas. Aleatrias so
as variaes inerentes ao sistema fsico e s condies de operao. Epistmicas so aquelas
oriundas do desconhecimento de alguma fase ou processo para o modelamento do sistema.
2.1. Projeto e Otimizao na Presena de Incertezas 11
Enquanto estas podem ser resolvidas com melhoria dos modelos, ou com o uso de uma base de
dados mais representativa, as aleatrias no.
Beyer e Sendhoff (2007) expande essa classicao das incertezas para quatro tipos:
A Mudanas ambientais. Estas podem ser descritas como do tipo
i
=
i
, ou seja, os rudos
so oriundos de variaes nas condies ambientais. Exemplos so: rajadas de vento
alterando o ngulo de ataque em aeroflios, temperatura, presso, umidade.
B Tolerncias de produo, e impreciso de atuador. Originam-se do fato que os fatores de
controle x podem ser somente aproximados dos valores nominais, com um determinado
grau de preciso. Podem ser descritas como uma parcela dos fatores de controle, do tipo
x+ = [x
1
+
1
, x
2
+
2
, . . . , x
p
+
p
], onde pode depender do valor de x. Para tolerncias
de fabricao relativas, isto , em funo da dimenso a que se referem,
i
=
i
x
i
.
C Incertezas de sada do sistema. Neste grupo esto includos os erros na avaliao do desem-
penho do sistema. Erros de medio de todos os tipos e erros de aproximao das sadas
pelo uso de modelos ao invs das variveis fsicas reais (erros de modelo).
D Incertezas de viabilidade. Incertezas nas restries a que o sistema est sujeito. Estas in-
certezas se relacionam s fronteiras do espao de projeto.
Segundo esta classicao, as incertezas podem ser escritas como = [, ], onde
so somente incertezas do tipo (A) e so as incertezas do tipo (B). Incertezas C e D esto
ligadas aos modelos utilizados e ao espao de projeto. As incertezas do tipo (A) a (D) podem
ser tratadas matematicamente de diversas formas. Basicamente, podem ser modeladas de modo
probabilstico, determinstico ou possibilstico.
1. Probabilstico: Dene medidas de probabilidade (funo densidade de probabilidade,
mdia e desvio) descrevendo a possibilidade da ocorrncia de eventos.
2. Determinstico: Dene intervalos de pertinncia nos quais valores de podem variar, ou
seja, [
inf,i
i
sup,i
].
3. Possibilstico: Dene nveis de possibilidade de um evento ocorrer ou do valor da pertur-
bao pertencer a um determinado conjunto de valores, utilizando os conceitos da lgica
difusa.
Tem-se assim doze possibilidades de classicao e tratamento das incertezas, com suas
correspondentes denies de robustez. Neste trabalho, as incertezas nas quais se est interes-
sado so as dos tipos A e B. Para estas, os modelos de tratamento mais utilizados tm sido os
modelos probabilstico e determinstico (Beyer e Sendhoff, 2007). Inicialmente, sero vistos os
modelos probabilstico e determinstico acerca do tratamento de incertezas e as correspondentes
12 Captulo 2. Projeto Robusto e Otimizao
denies de robustez. Os mtodos possibilsticos lidam com incertezas de modelo e de seus
parmetros de entrada. Neles, a classicao do sistema sendo avaliado depende de funes
baseadas na lgica difusa, cujo estudo mais detalhado foge ao escopo deste trabalho e por isso
no sero abordados.
2.1.2 Representao das Incertezas
Modelos Probabilsticos
Quando se conhece de que maneira se comportam as incertezas , ou seja, quando ex-
iste uma base de dados grande o suciente, pode-se ajustar a probabilidade dos valores das
incertezas a um modelo conhecido (distribuio gaussiana, log-normal, beta), ou a um outro
modelo particular a essas incertezas. Obtm-se assim uma funo de densidade de probabil-
idade do tipo p(, ). Vrias medidas de robustez so, a partir da, propostas na literatura,
baseadas em medidas de expectncia
2
do valor de f, que denominado equivalente robusto de
f ou F
e
:
F
e
(x) = E[f(x)] (2.2)
onde E a expectncia do valor de f. necessrio aqui denir a expectncia de uma varivel
ou funo. A expectncia formalmente denida como a soma innita dos produtos entre os
valores de uma funo de varivel com incerteza, vezes a probabilidade desta varivel assumir
determinado valor, ou seja:
E[x] =
i
x
i
p(x
i
), i = 1, . . . , (2.3)
para x assumindo valores discretos ou para x contnuo:
E[x] =
_
xp(x)dx (2.4)
Tanto a soma quanto a integral devem, necessariamente, convergir a um valor nito de E.
Para funes, usa-se a forma anloga expectncia de uma varivel incerta. Ovalor experado da
funo dado por uma mdia ponderada do valor dessa funo, tendo por pesos a probabilidade
da varivel. Ou, para funes no-discretas:
E[g(x)] =
_
g(x)p(x)dx (2.5)
Mais detalhes podem ser encontrados na literatura voltada estatstica, como por exemplo, em
2
A expectncia tem por sinnimos mdia e valor mdio (Soong, 2004).
2.1. Projeto e Otimizao na Presena de Incertezas 13
Soong (2004).
Assim, da denio de expectncia pela Equao 2.2 e pela Equao 2.5 vem:
F
e
(x) =
_
f(x + , )p(, )dd (2.6)
Na Equao 2.6, F
e
tem sido chamada adaptao efetiva
3
. Para os objetivos deste tra-
balho, F
e
pode ser considerado como o valor robusto da funo de desempenho, considerando
a variabilidade dos parmetros de projeto. Porm, outras formas de se expressar a robustez so
utilizadas. Uma maneira complementar de se denir a robustez em termos probabilsticos a de
vericar se, nas regies do domnio de f, a funo tenha uma forma aproximada do plat, ou
seja, uma vericao de sua sensibilidade. Isto sugere a utilizao de medidas de disperso
de f:
F
d
(x) =
_
[f(x + , ) f(x)]
2
p(, )dd (2.7)
Mostra-se que a disperso de f (varincia) F
d
dada pela Equao 2.7 pode ser escrita
como:
F
d
(x) = Var[f(x)] = E[f
2
(x)] [F
e
(x)]
2
, (2.8)
onde
E[f
2
(x)] =
_
(f(x + , ))
2
p(, )dd (2.9)
ou seja, uma forma alternativa Equao 2.7.
Desta maneira, a robustez pode ser expressa como a disperso do valor de f, dada pela
Equao 2.7. Em problemas de otimizao, as Equaes 2.6 e 2.7 (ou 2.8) podem produzir
valores conitantes, ou seja, minimizando F
e
, podemos obter grandes disperses F
d
(grandes
varincias de f), ou vice-versa. H umcompromisso ao se escolher o vetor x a ser adotado como
parmetros de projeto nais, o que resulta num desempenho e varincia desse desempenho
[F
e
, F
d
], caracterstico dos problemas de otimizao multiobjetivo.
Deve-se notar, porm, que o clculo das equaes acima de forma analtica no pos-
svel, a menos de alguns exemplos simples. Para sua avaliao, so utilizados mtodos de
aproximao numrica das integrais. Uma das tcnicas mais utilizadas a baseada em mtodos
de Monte Carlo, mas com relativamente alto custo computacional. Isto devido ao fato da
qualidade da aproximao numrica da varincia de f ser diretamente proporcional nmero de
avaliaes da prpria f, o que vem a tornar o mtodo mais caro computacionalmente.
3
Do ingls effective tness.
14 Captulo 2. Projeto Robusto e Otimizao
Modelos Determinsticos
Na ausncia de uma quantidade de dados suciente para caracterizar a funo densidade
de probabilidade p(, ), so necessrias outras maneiras de denir o desempenho e a medida
de robustez. A mais simples delas se baseia em considerar que os valores da perturbao
i
pertencem a um intervalo nito [
i
,
+
i
]. O efeito destes limites
ou
+
se propaga atravs do
modelo, inuindo na performance do sistema de um modo relativamente elevado, considerando
que o uso dos valores de fronteira implica em se considerar a situao mais desfavorvel
4
.
Neste modelo, no se utiliza a probabilidade dos valores no intervalo (apenas nos extremos),
contrastando aos modelos probabilsticos, onde a funo de densidade de probabilidade p(, )
se extende de [, ].
Sem perda de generalidade, o desenvolvimento abaixo ser feito para as incertezas associ-
adas aos parmetros de projeto (tipo B) inicialmente. A princpio, faz-se a expanso de f(x+)
em srie de Taylor, truncando os termos de ordem da derivada superior a 1:
f(x + ) = f(x) +
p
i=1
f
x
i
i
Por hiptese, E[] = 0, o que se justica, pois se E[] =
c
,= 0, o valor
c
pode ser acrescido
ao valor dos parmetros de controle. Assim, em primeira aproximao, o valor da expectncia
de f em relao a a prpria f, ou seja:
E[f(x)] = f(x) (2.10)
e a varincia:
Var[f(x)] = E
_
_
_
f(x) +
p
i=1
f
x
i
i
E[f(x)]
_
2
_
_
(2.11)
Substituindo a Equao 2.10 em 2.11, tem-se:
Var[f(x)] = E
_
_
_
p
i=1
f
x
i
i
_
2
_
_
(2.12)
= E
_
p
i=1
p
j=1
f
x
i
f
x
j
j
_
Var[f(x)] =
p
i=1
p
j=1
f
x
i
f
x
j
E[
i
j
] (2.13)
4
Em ingls, worst case scenario.
2.1. Projeto e Otimizao na Presena de Incertezas 15
Introduzindo a matriz de covarincia C[(C)
ij
= E[
i
j
] e o vetor gradiente de f, f, a
Equao 2.13 se torna:
Var[f(x)]
1
=
T
fCf (2.14)
Se as incertezas no esto correlacionadas, C uma matriz diagonal, contendo os termos
2
i
=
Var[
i
] = E[
2
i
]. Em tais casos, a Equao 2.14 reduzida a:
Var[f(x)]
1
=
p
i=1
_
f
x
i
_
2
2
i
(2.15)
Ou seja, desde que seja possvel calcular a derivada de f no ponto x e se conhea o desvio padro
da incerteza associada a cada varivel de projeto, pode-se estimar a varincia da funo neste
ponto. Esta medida de robustez denominada robustez de sensibilidade. Deve ser lembrado o
fato de que a aproximao para o valor da expectncia de f(x) linear, ou seja, o valor mdio
de f igual a f(x). Este valor da funo um dos objetivos a serem otimizados. O segundo
objetivo, a robustez, otimizada minimizando a Equao 2.15.
A Equao 2.15 possui uma limitao central: em um ponto de mximo ou mnimo, as
derivadas parciais so iguais a zero. Isto faz com que esta denio de varincia no seja vlida
quando o ponto de mximo ou mnimo, local ou global
5
. Por outro lado, na prtica muitas
vezes a funo f no possui uma forma analtica simples e o clculo do gradiente efetuado
numericamente. Isto feito avaliando a funo em intervalos x e efetuando a diferenciao.
Dessa maneira, escreve-se a Equao 2.15 utilizando o intervalo x = :
Var[f(x)]
1
=
p
i=1
_
f(x
i
+
i
) f(x
i
)
i
_
2
2
i
+
i
=
p
i=1
(f(x
i
+
i
) f(x
i
))
2
_
i
_
2
+
i
=
p
i=1
(f(x
i
+
i
) f(x
i
))
2
E[
2
i
]
2
i
+
i
(2.16)
onde
i
o erro de aproximao da derivada parcial em cada direo. Na condio mais des-
favorvel, a probabilidade de que a varivel
i
assuma seu valor mximo, ou seja, [
i
,
i
],
de p= 1/2 (ou seja, os nicos valores possveis esto nos extremos do intervalo). Da Equao
2.3, vem que E[
2
i
] = (
2
i
1/2 + (
i
)
2
1/2) =
2
i
. Substituindo na Equao 2.16, tem-se
nalmente:
Var[f(x)]
1
=
p
i=1
(f(x
i
+
i
) f(x
i
))
2
+
i
(2.17)
5
Excetua-se os casos localizados nas fronteiras do domnio de solues.
16 Captulo 2. Projeto Robusto e Otimizao
Considerando que o erro
i
pequeno, pode-se escrever a Equao 2.17 como:
Var[f(x)]
1
=
p
i=1
(f(x
i
+
i
) f(x
i
))
2
(2.18)
Esta frmula similar forma sugerida por Taguchi (Yang e El-Haik, 2009), onde se
prope o uso do desvio quadrtico mdio MSD
6
para o clculo da sensibilidade do sistema
amostrado:
MSD =
1
n
n
i=1
(f
i
f)
2
(2.19)
onde f
i
o valor de f perturbada da quantidade
i
e n o nmero de ensaios onde a perturbao
aplicada, escolhidos segundo o projeto dos experimentos. Taguchi utiliza um nmero de
experimentos baseado no nmero de variveis de projeto N
1
ou o vetor interno, e no nmero de
fatores de perturbao (rudo) N
2
, o vetor externo. O nmero de experimentos N
1
N
2
, para
rudos no-correlacionados (Yang e El-Haik, 2009). O procedimento o de, para cada conjunto
de combinaes de rudo, calcular o valor do MSD da resposta da funo f, avaliando assim
a relao sinal/rudo e consequentemente a sensibilidade do sistema. Para efeitos prticos, a
diviso ou no por n nas Equaes 2.18 e 2.19 tem o efeito de normalizar a medida resultante
da sensibilidade do sistema, quanto ao nmero de experimentos realizados.
A aproximao da varincia de f(x) ou do MSD obtida pode ser, ento, usada para
quanticar a robustez do sistema representado. No foi mostrado acima, mas os rudos do tipo
(A) podem tambm ser includos na Equao 2.18 sem maiores problemas, desde que o modelo
inclua essas entradas no clculo do desempenho do sistema.
2.2 Otimizao Aerodinmica e Robustez
Foi visto que, conhecida a distribuio de probabilidades das perturbaes na entrada,
pode-se, por meio de tcnicas de Monte Carlo, aproximar as Equaes 2.6 e 2.8 a m de estimar
o desempenho e robustez de um sistema nas entradas. Quando desconhecida, uma aproximao
mais simplicada, por meio das Equaes 2.10 e 2.18 pode ser usada. Este o caso neste
trabalho. Uma quanticao dos erros de fabricao de ps de turbomquinas ou aeroflios iso-
lados, ou degradao de sua geometria por desgaste, por si j demandam trabalhos de pesquisa.
Estudos a respeito da variabilidade geomtrica de ps de compressores foram feitos recente-
mente por Lamb (2005) e Thakur et al. (2008), ambos utilizando o mtodo das componentes
principais (PCA
7
) para a avaliao dos erros envolvidos na fabricao de ps de turbomquinas.
6
Sigla do ingls Mean Square Deviation.
7
Em ingls, Principal Component Analysis.
2.3. Recapitulao 17
Kontoleontos et al. (2005), por sua vez, aplicam as perturbaes de maneira determins-
tica, utilizando valores de
i
= e avaliando a robustez por meio da Equao 2.18. Ainda
neste trabalho,uma anlise de sensibilidade foi efetuada aps o procedimento de otimizao.
Nele, perturbaes do tipo
i
= 0, 001jc, onde c a corda do aeroflio, e j = [5, 4, . . . , 4, 5],
foram aplicadas geometria do aeroflio em pontos diversos da superfcie de suco, descrita
por meio de curvas de Bzier. Seu resultado mostra que, do lado de suco dos aeroflios,
podem-se notar maiores perturbaes da performance em posies mais prximas do bordo de
ataque dos aeroflios menos robustos.
Utilizando mtodos inversos, porm, a geometria desconhecida. As perturbaes devem
ser feitas, ento, sobre as distribuies de velocidade. Isto torna ainda mais difcil quanticar
os valores de
i
a serem utilizados no procedimento e sua distribuio de probabilidades. Isto
justica ainda mais o uso da aproximao dada pelas Equaes 2.10, e 2.18 como mtricas do
desempenho e sua varincia, no projeto inverso de grades ou aeroflios isolados.
2.3 Recapitulao
Neste captulo foram vistos os conceitos bsicos de projeto robusto e a quanticao da
robustez utilizando a varincia da funo de desempenho do sistema. Foram desenvolvidas
equaes para esta varincia por mtodos probabilsticos e determinsticos, e discorreu-se sobre
a escolha de procedimentos determinsticos neste trabalho. Nos prximos captulos, ser visto
o arcabouo terico para o clculo do desempenho das grades aerodinmicas, tendo por base
a sua representao por meio de curvas paramtricas e o clculo das perdas em funo do
desenvolvimento da camada-limite por sobre os pers.
18 Captulo 2. Projeto Robusto e Otimizao
Captulo 3
Curvas de Bzier e B-Splines
Neste captulo sero vistas algumas das propriedades das curvas de Bzier e das B-splines.
Sua importncia neste trabalho grande, tendo em vista que as representaes das distribuies
de velocidade e das perturbaes aplicadas a essas distribuies foram feitas utilizando B-
splines, enquanto os aeroflios foram representados utilizando curvas de Bzier. A simplici-
dade de programao mais um atrativo para a sua utilizao como forma de parametrizao
de curvas.
Assim, ser visto no que segue a formulao bsica tanto das curvas de Bzier quanto
da B-spline. Neste texto, ser usada a forma C = C(x, y) para a gerao de curvas planas
apenas. Isto de modo algum diminui a generalidade do desenvolvimento, visto que o acrscimo
de mais uma dimenso z feito comalteraes mnimas dos algoritmos computacionais, e ainda
menores formulao desenvolvida neste captulo. Recomendam-se pormao leitor interessado
em se aprofundar no assunto os trabalhos de Rogers (2001) e Piegl e Tiller (1996).
3.1 A representao paramtrica de curvas
As curvas no espao podem ser representadas algebricamente de duas formas bsicas: a
forma implcita e a forma explcita ou paramtrica. A forma implcita , geralmente, da forma
f(x, y) = 0, como por exemplo, x
2
+ y
2
= 1, que representa um crculo de raio 1. J a forma
explcita do tipo x = f(t) e y = g(t), onde t o parmetro no intervalo c
1
< t < c
2
.
A curva formada C(t) = (x(t), y(t)), pode ser pensada, por exemplo, como a trajetria de
uma partcula ao longo do tempo. Uma das caractersticas destas curvas a de possurem
uma direo natural, ou seja, de C(c
1
) a C(c
2
). Outra caracterstica das curvas paramtricas
a facilidade de calcular os pontos da curva se comparado representao implcita. J a
vericao se um ponto pertence curva mais complexa. Normalmente, o parmetro abrange
o intervalo 0 t 1. Esta conveno visa apenas a simplicar os clculos e universalizar os
resultados.
19
20 Captulo 3. Curvas de Bzier e B-Splines
A forma paramtrica normalmente escolhida como representao geomtrica principal-
mente pela vantagem de clculo dos pontos formadores da curva (bem como de suas derivadas).
Para a representao paramtrica, a forma polinomial indicada. Polinmios so relativamente
bem estudados, so capazes de representar com preciso vrias das curvas de interesse, pos-
suem processamento eciente e requerem pequeno espao de memria para clculo. Duas
formas principais de polinmios podem ser utilizadas: base de potncias e Bzier (e B-splines).
Na representao utilizando base de potncias, as funes C(t) so representadas da
forma:
C(t) = (x(t), y(t)) 0 t 1 (3.1)
x(t) =
n
i=0
x
i
t
i
y(t) =
n
i=0
y
i
t
i
(3.2)
Um dos problemas que esta forma possui pouca relao geomtrica com a curva pro-
duzida, sendo assim menos intuitiva. Como exemplo, a representao PARSEC, descrita por
Sobieczky (de Souza, 2008), requer a soluo de um sistema de equaes no-lineares a m de
obter os coecientes x
i
e y
i
dos polinmios, traduzindo caractersticas geomtricas como o raio
de curvatura no bordo de ataque, espessura mxima, entre outras, nestes coecientes. Assim,
para x = t, (0 t 1):
y
c
= a
1
x + a
2
x + a
3
x
2
+ a
4
x
3
+ a
5
x
4
(linha de cambagem)
y
t
= b
1
x + b
2
x
2
+ b
3
x
3
+ b
4
x
4
+ b
5
x
5
+ b
6
x
6
(distribuio de espessura)
Apesar de os coecientes a
i
e b
i
terem sido obtidos a partir de valores geomtricos, eles
no possuem nenhum signicado fsico, no sendo assim de simples manipulao.
3.2 As curvas de Bzier
A formulao das curvas de Bzier uma forma equivalente de bases de potncias,
porm do tipo:
C(t) =
n
i=0
B
i,n
P
i
, 0 t 1 (3.3)
B
i,n
=
n!
i!(n i)!
t
i
(1 t)
ni
(3.4)
P
i
o vetor de coordenadas P
i
= [x
i
, y
i
] dos chamados pontos de controle que denem o
contorno geral da curva. B
i,n
so os chamados Polinmios de Bernstein.
3.2. As curvas de Bzier 21
Verica-se que os polinmios B
i,n
tm grau mximo n, para um nmero de pontos de
controle igual a (n + 1) e a forma das curva dada pela combinao destes polinmios B
i,n
tendo como pesos os pontos P
i
. Pode-se ver na Figura 3.1 a forma dos 5 polinmios gerados
para n = 4. Uma demonstrao da maneira como a curva formada segue os pontos vista na
Figura 3.2. Algumas das propriedades de interesse das curvas de Bzier so (Rogers, 2001) :
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
B(0,4)
B(1,4)
B(2,4)
B(3,4)
B(4,4)
Figura 3.1: Polinmios de Bernstein para n = 4.
Figura 3.2: Curva de Bzier e pontos de controle.
As funes de base so reais;
O grau do polinmio que dene a curva (n 1), onde n o nmero de pontos de
controle;
A curva gerada possui derivadas contnuas at o grau dos polinmios de Bernstein;
22 Captulo 3. Curvas de Bzier e B-Splines
A curva est contida no polgono de controle (linha poligonal formada pelos pontos de
controle), seguindo (em geral), a sua forma;
O primeiro e ltimo pontos da curva coincidem com o primeiro e ltimo pontos de cont-
role;
As tangentes no incio e nal da curva formada so idnticas s do primeiro e ltimo
segmentos da linha poligonal;
As curvas so invariantes rotao, mudanas de escala e translaes. Para mudar a curva
necessrio apenas mudar o polgono de controle.
Uma das limitaes das curvas de Bzier o fato de todos os pontos de controle possurem
inuncia sobre a curva, isto , a mudana de um dos pontos de controle sentida em toda sua
extenso. Isto pode ser compreendido observando novamente a Figura 3.1, onde pode ser notado
que o valor dos polinmios de base no zero ao longo de toda a faixa de parmetros (excluindo
os extremos). Alm do mais, esta representao exige polinmios de grau mais elevado quanto
maior o nmero de pontos de controle, o que a torna mais instvel numericamente. Essas
limitaes das curvas Bzier podem ser elimitadas utilizando, ao invs, as B-splines.
3.3 Parametrizao por B-splines
As B-splines (ou splines de base) so curvas que, da mesma maneira que as Bzier, uti-
lizam formas recursivas de construo dos polinmios de base, ponderados pelos pontos de
controle. A forma geral de uma curva C(t) dada por:
C(t) =
n
i=0
N
i,k
(t)P
i
, a t b, 1 k n (3.5)
onde (n + 1) o nmero de pontos de controle P
i
, k a ordem da B-spline (ou seja, a B-spline
formada por polinmios de grau k1) e cujos polinmio de base N
i,k
(t) so denidos conforme
abaixo:
N
i,0
(t) =
_
_
_
1 se u
i
t < u
i+1
,
0 para os demais valores.
(3.6)
N
i,k
(t) =
t u
i
u
i+k
u
i
N
i,k1
(t) +
u
i+k+1
t
u
i+k+1
u
i+1
N
i+1,k1
(t) (3.7)
Introduz-se aqui um elemento que no existe nas curvas de Bzier: o vetor de ns. Este vetor
age como um divisor do parmetro t em segmentos e que faz com que a curva C(t) seja formada
por vrias partes, com as seguintes propriedades:
3.3. Parametrizao por B-splines 23
C(t) um polinmio de grau k 1 em cada intervalo u
i
t < u
i+1
;
C(t) e suas derivadas at a ordem 1,2,. . . ,k2 so contnuas ao longo de toda a curva.
O vetor de ns , de maneira geral, dado por U = [a, . . . , u
i
, u
i+1
, b], mas na prtica, a =0 e
b =1, o que faz com que coincidam com o intervalo onde se dene o parmetro da curva t.
Vrias distribuies de ns so possveis, porm, obrigatoriamente, o n subsequente deve ser
maior ou igual ao n anterior (u
i+1
u
i
). Neste trabalho, ser utilizado o tipo denominado
aberto, uniforme. Isto signica que o nmero de ns de n + k, ou seja, o nmero de pontos
de controle mais a ordem da B-spline. No caso das B-splines, para que haja concordncia
entre os pontos de controle inicial e nal e os pontos inicial e nal da curva e as derivadas
tambm coincidentes nestes pontos, deve haver a chamada multiplicidade dos ns nos extremos
do vetor. Ou seja, U = [0, . . . , 0, u
i
, . . . , 1, . . . , 1], onde o nmero de 0 e 1 igual ordem da
B-spline desejada
1
. O termo uniforme se refere ao fato dos demais ns estarem igualmente
espaados. No se aprofundar mais neste texto a respeito do efeito das vrias possibilidades de
distribuio dos ns, como a utilizao de outras formas de espaamentos dos ns (ou seja, de
maneira no-uniformes) e multiplicidade no interior do vetor de ns. Apesar destas possurem
algumas propriedades de interesse para o controle das curvas produzidas, sua utilizao no foi
considerada necessria neste trabalho.
O controle sobre a curva feito ento sobre a posio dos pontos de controle (visto na
Figura 3.3) e a ordem da B-spline. Para esta ltima, a Figura 3.4 mostra a comparao entre uma
curva Bzier e uma B-spline de ordem k = 3, para 10 pontos de controle. A curva de Bzier,
neste caso, produz uma curva que no se aproxima dos pontos com a mesma exibilidade da
B-spline. As propriedades das B-splines so similares s das curvas Bzier, porm devem
Pontos de Controle
Curva Gerada
Figura 3.3: B-splines formadas alterando 1 ponto de controle.
ser acrescentadas a do mximo valor para a ordem da B-spline, igual ao nmero de pontos de
controle. O grau da B-spline de n 1, ou seja, uma B-spline de ordem 3 possui polinmios
1
No caso limite onde k = n, para vetores de ns abertos e uniformes, a B-spline recai na curva de Bzier
(Rogers, 2001).
24 Captulo 3. Curvas de Bzier e B-Splines
Curva Bezier
B-spline, k=3
Figura 3.4: Comparao entre a curva Bzier e a B-spline de ordem k = 3.
de grau 2. Assim, a segunda derivada de uma B-spline de ordem 3 pode ser descontnua na
interface de dois polinmios. Para aplicaes que necessitem de uma curvatura contnua, torna-
se ento necessrio utilizar B-splines de ordem mnima k = 4. Isto uma preocupao em
vrios campos da engenharia mecnica, como no projeto de cames, ou das curvas da carroceria
de um veculo
2
e, em especial, tambm em aerodinmica.
Uma limitao de ambas, Bzier e B-spline, a incapacidade de representarem exata-
mente sees de cnicas, o que resolvido utilizando as chamadas NURBS
3
, ou B-splines
racionais no-uniformes. No presente trabalho, no foram utilizadas as NURBS, pelo fato de
no ter sido necessria a parametrizao de cnicas. Limitou-se o uso s curvas de Bzier para
a representao de aeroflios e B-splines para as distribuies de velocidade ou presso, como
ser visto no que segue.
3.4 Uso na Representao de Aeroflios
O uso de curvas de Bzier e B-splines na representao de aeroflios difere um pouco da
desenvolvida pela NACA
4
de especicar coecientes com signicado geomtrico associados
a polinmios, para gerar corretamente a geometria nal dos aeroflios. Aeroflios de 4 e 5
dgitos especicam espessura, posio e valor da cambagem mxima do aeroflio, bem como
seu coeciente de sustentao para incidncia 0(aeroflios de 5 dgitos). J o uso de pontos de
controle facilita a visualizao geomtrica da forma bsica do aeroflio antes de seu traado,
atravs da linha poligonal, porm no d indicao precisa da espessura mxima, arqueamento,
ou raios de curvatura. Apesar disso, a representao de aeroflios por meio destas curvas foi
objeto de diversos trabalhos na literatura, como por Song e Keane (2004) e sua aplicao em
2
Uma continuidade de no mnimo C
2
necessria neste caso (Rogers, 2001).
3
Do Ingls Non-Uniform Rational B-splines.
4
Do ingls National Advisory Committee for Aeronautics.
3.4. Uso na Representao de Aeroflios 25
procedimentos de otimizao foi mostrada por Moino (2006) e de Souza (2008). No presente
trabalho, duas maneiras bsicas foram utilizadas para traar os aeroflios: a disposio de pon-
tos de controle para o extradorso e para o intradorso dos aeroflios; a disposio de pontos de
controle formando as curvas de arqueamento e de espessura dos aeroflios.
Na Figura 3.5 pode-se ver uma distribuio de pontos de controle para o extradorso e
intradorso e a respectiva curva de Bzier, utilizados para representar o aeroflio NACA 2412
(tabela de coordenadas obtida de Abbott e von Doenhoff (1959)). O primeiro e ltimo pontos
de controle permanecem posicionados no eixo das abcissas (bordo de ataque em (0, 0) e bordo
de fuga em (1, 0))) e o segundo ponto de controle est situado no eixo das ordenadas, a m de
forar a suavizao da curvatura no bordo de ataque. Para esta representao, a aproximao por
Bzier foi capaz de reduzir a soma dos erros a 0,2% da corda, para uma discretizao com 100
pontos para cada dorso do aeroflio (medido somando-se as distncias de todos os 32 pontos
originais curva de Bzier obtida).
A obteno dos pontos de controle de uma curva de Bzier (ou uma B-spline) para repre-
sentar um aeroflio pode ser tratada como um problema de otimizao, onde se minimiza o erro
de aproximao da posio das coordenadas do aeroflio (normalmente obtido de tabelas) da
curva paramtrica obtida. Neste trabalho, um procedimento de ajuste por mnimos quadrados
foi utilizado com sucesso para a obteno dos pontos de controle.
Uma das propriedades das curvas de Bzier a de possuir derivadas contnuas at a or-
dem igual ao nmero de pontos de controle (as derivadas de ordem superior tm valor 0 no
intervalo do parmetro t). Isto garante a suavidade da forma do aeroflio, minimizando os-
cilaes indesejadas. Curvas B-spline podem tambm ser utilizadas e so mais exveis. Foi
vericado durante o trabalho, porm, que o uso de B-splines no produz resultados signica-
tivamente melhores. Pelo contrrio, durante a inverso das distribuies de velocidade para a
obteno de aeroflios e grades, o uso das B-splines pode conduzir a aeroflios com oscilaes
na distribuio de velocidades obtidas em torno da distribuio desejada. Por este motivo, para
a representao da geometria dos aeroflios, foi preferido o uso de curvas de Bzier.
NACA 2412
Pontos de controle
Curvas de Bezier
Figura 3.5: Curvas Bzier representando o aeroflio NACA 2412.
Neste trabalho, um outro mtodo foi tambm utilizado na representao de aeroflios
com grande arqueamento. Este mtodo mostrado na Figura 3.6c e utilizado por Dunavant e
Erwin (1956) para a representao de pers para grades de turbinas usadas em turbomquinas
trmicas. Neste mtodo, as linhas de arqueamento (Figura 3.6a) e de espessura do aeroflio
26 Captulo 3. Curvas de Bzier e B-Splines
(Figura 3.6b) so especicadas. A inclinao da linha de arqueamento nos bordos de ataque e
de fuga uma condio imposta, e a espessura pode ser variada multiplicando-se a ordenada da
linha de espessura por uma constante de escala. Ambas as linhas podem ser representadas por
curvas de Bzier.
Figura 3.6: Representao de um aeroflio por meio das linhas de arqueamento e espessura.
Ambos os mtodos podem ser extendidos para gerao de ps tridimensionais, utilizando
os polinmios de base em duas direes ortogonais u e w. Este assunto encontra-se alm do
escopo deste trabalho, mas seu desenvolvimento pode ser encontrado nas referncias listadas
no prembulo deste captulo.
3.5 Representao de Curvas de Presso e Velocidade
De maneira similar representao da forma geomtrica de aeroflios, tambm as curvas
de coeciente de presso e de velocidade do uido sobre o contorno do aeroflio podem ser
aproximadas utilizando curvas paramtricas. Neste caso, porm, as B-splines so preferidas s
Bzier, pela maior exibilidade das curvas obtidas (novamente observando a Figura 3.4). Esta
maior exibilidade necessria pelo fato de, com o aumento do ngulo de ataque dos aeroflios
em relao ao escoamento, ocorrerem picos de velocidade associados ao contorno do bordo de
ataque feito pelas linhas de corrente. Pode-se ver esse efeito utilizando o aeroflio NACA
2412, ilustrado na Figura 3.7. Neste exemplo, apenas 8 pontos so utilizados de cada lado do
aeroflio, e verica-se tambm uma boa representao do pico de velocidade.
Este tipo de parametrizao foi utilizado por Obayashi e Takanashi (1996) para repre-
sentao de aeroflios transnicos em asas isoladas. O motivo para a utilizao das B-splines
a diminuio do nmero de parmetros associados representao das distribuies de ve-
locidade e a consequente diminuio das variveis de otimizao. Esta representao um dos
aspectos principais do trabalho e ser vista em mais detalhes no captulo 6.
3.6. Recapitulao 27
0
0.25
0.5
0.75
1
1.25
1.5
1.75
2
0 0.25 0.5 0.75 1
V
e
l
o
c
i
d
a
d
e
,
V
/
V
i
n
f
Comprimento molhado, p.u.
Pontos de controle
B-spline
Metodo de paineis
Figura 3.7: Velocidade em torno do perl NACA 2412, representada por B-splines ( = 6
).
3.6 Recapitulao
Neste captulo foram vistos os princpios bsicos da parametrizao de curvas planas na
forma de curvas de Bzier e B-splines. Foram mostradas os polinmios de base que geram estas
curvas e suas propriedades. Tambm foram vistas as representaes de pers aerodinmicos em
curvas de Bzier e B-splines e o erro associado em um exemplo de parametrizao. Foi tambm
mostrada a utilizao de B-splines para representar a distribuio de velocidades em torno de
aeroflios. Esta representao de grande importncia para este trabalho, como ser visto no
Captulo 6.
28 Captulo 3. Curvas de Bzier e B-Splines
Captulo 4
Escoamento em Grades
A anlise do escoamento em torno dos corpos foi sistematizada no incio do sculo XX,
acompanhando o desenvolvimento da aeronutica. Ao mesmo tempo, iniciou-se o estudo do
escoamento ao redor das chamadas "grades", de grande importncia para o modelamento das
turbomquinas. Ser aqui analizado o escoamento em torno das grades aerodinmicas, uti-
lizando a forma integral das equaes da mecnica dos uidos, i.e., as equaes da quantidade
de movimento e de conservao da massa e energia aplicadas a um volume de controle nito.
4.1 A Grade Aerodinmica
A Figura 4.1 mostra um rotor axial de turbomquina. Se for efetuado um corte cilndrico,
de raio r neste rotor, o desenvolvimento da seco num plano uma srie innita e peridica
de elementos com o formato da p da turbomquina no raio da seco. A esse desenvolvimento
denominamos grade linear.
A grade linear modelada como sendo composta por um nmero innito de ps igual-
mente espaadas por uma medida s, de envergadura tambm innita e corda c, como visto na
Figura 4.1. As ps so montadas em um ngulo , denido entre a linha da corda do perl e
a perpendicular linha frontal da grade, i.e., a linha horizontal. Os pers aerodinmicos so
construdos da maneira usual s ps isoladas, seja por meio de coordenadas (x, y) para os lados
superior e inferior ou por meio das coordenadas de sua linha de arqueamento e da espessura.
A relao entre a corda das ps e seu espaamento um parmetro importante, denomi-
nado razo de solidez, denida por:
=
c
s
(4.1)
No somente rotores podem ser modelados utilizando o conceito de grade, mas tambm esta-
tores (ainda para o caso de turbomquinas). De modo semelhante ao estudo das ps isoladas,
29
30 Captulo 4. Escoamento em Grades
Figura 4.1: Rotor de turbomquina geradora, e uma grade de ps associada.
tambm so denidas para os elementos da grade as foras de sustentao e arrasto, comuns
anlise de escoamentos externos. Porm, uma caracterstica principal da grade a de ser um
divisor do domnio onde ocorre o escoamento. Neste ponto a grade difere do corpo isolado.
Pelo fato de se estender como uma srie innita sobre o domnio, a grade causa uma deexo
da direo de todo o escoamento, enquanto a p isolada afeta o escoamento apenas em nvel
local.
Assim, a grade innita de ps permite uma anlise simplicada do escoamento. Ao mode-
lar a deexo do uido em um escoamento plano, tem-se uma melhor percepo do escoamento
tridimensional presente nas turbomquinas.
4.2 Anlise Integral Bidimensional
A anlise de resultados obtidos em tneis de vento para grades ainda hoje fundamenta
o desenvolvimento de novos equipamentos e as anlises empregando a dinmica dos uidos
computacional (CFD) ainda so comparadas a estes resultados, tomados como benchmark. O
estudo das foras atuando nas ps por mtodos integrais ainda utilizado para o clculo do
arrasto e sustentao, e ecincia das grades aerodinmicas.
Considera-se que o escoamento se aproxima da p com velocidade relativa w
1
, e ngulo
1
, e se afasta com velocidade w
2
e ngulo
2
como visto naFigura 4.2. Ainda nesta gura
v-se que a velocidade w
2
maior que w
1
(b), o que caracteriza esta grade como uma grade de
acelerao, tambm chamadas de motoras ou injetoras, tpica de rotores de turbinas. Se, ao
contrrio, w
1
> w
2
(a), tem-se uma grade difusora, tambm chamada de geradora ou de retar-
damento, tpica de rotores de bombas. Apesar dessa nomenclatura ser clssica e encontrada em
4.2. Anlise Integral Bidimensional 31
diversos textos, podem-se ter grades aceleradoras em bombas (a montante do primeiro estgio,
gerando uma pr-rotao ao escoamento). Neste texto sero usados, de modo a manter a maior
generalidade possvel aos desenvolvimentos, os termos motora ou geradora em referncia s
grades lineares. O caso limite w
1
= w
2
aplicado em turbinas (Curtis) e tambm em grades
escionrias de desvio ou regularizao do escoamento. Estas grades sero chamadas neste texto
de grades de desvio.
Um detalhe importante: na nomenclatura alem, os ngulos so medidos em relao
linha frontal da grade (direo circunferencial), enquanto que na nomenclatura inglesa, e neste
texto usada a direo axial. Isto acarreta, para um tratamento uniforme de todos os tipos de
grade, ngulos positivos para grades motoras, e negativos para grades geradoras.
4.2.1 Foras Atuantes nas Ps
Na Figura 4.2, isolada uma p da grade para anlise, por meio de uma superfcie de
controle peridica e de velocidade igual da grade, cujos limites laterais seguem linhas de
corrente mdias. Esta grade pode ser tanto uma grade motora quanto geradora, porm o sistema
de coordenadas adotado necessariamente o mesmo para ambas, de modo a ampliar assim
a validade do desenvolvimento que segue. Consideram-se as simplicaes de escoamento
permanente e incompressvel. Esta ltima hiptese justicvel em uma anlise inicial, visto
que boa parte dos ensaios em tnel de vento so executados a nmeros de Mach relativamente
baixos (M <0,3), quando os efeitos da compressibilidade podem ainda ser desconsiderados.
Deste modo, pelo princpio da continuidade, vem a igualdade do componente de velocidade
axial w
a
a montante e a jusante:
w
1
cos
1
= w
2
cos
2
= w
a
(4.2)
Sejam p
1
e p
2
as presses a montante e a jusante da superfcie de controle, respectiva-
mente. Calculando as foras F = F
x
i+F
y
j exercidas sobre o uido por unidade de comprimento
das ps, tem-se:
F +
_
SC
p(n)ds =
_
V C
g
dA +
_
SC
w(w
r
n)ds (4.3)
Os efeitos da acelerao gravitacional podem ser includos nas foras de presso, do tipo
p = p
+ gh (g = [g[, h altura) e desconsideram-se os efeitos das demais aceleraes
de corpo contidos em g
. Em seguida, observa-se que as fronteiras laterais da superfcie de
controle so anti-simtricas, portanto o uxo de massa que cruza essas fronteiras cancelado,
assim como as foras de presso sobre estas reas. Tem-se, desta maneira, para o componente
32 Captulo 4. Escoamento em Grades
Figura 4.2: Foras e velocidades na grade (Schlichting e Scholz, 1951).
x:
F
x
= [p
1
(s) + p
2
(s)] = (p
2
p
1
)s (4.4)
Para o escoamento invscido, (p
2
p
1
) =
1
2
(w
2
1
w
2
2
). Considerando que w
2
i
= w
2
iy
+ w
2
a
,
4.2. Anlise Integral Bidimensional 33
i = (1, 2), a Equao 4.4 torna-se:
F
x
= s
(w
2
1y
w
2
2y
)
2
= s
(w
1y
+ w
2y
)
2
(w
1y
w
2y
) (4.5)
Para o componente y, tem-se:
F
y
= [w
1y
(w
a
s) + w
2y
(w
a
s)] = w
a
s(w
1y
w
2y
) (4.6)
F
y
= sw
2
a
( tg
1
tg
2
) (4.7)
Por ser fundamental em uma grade a deexo do escoamento por ela causada, torna-se
oportuno denir o coeciente de deexo
y
. Este coeciente relaciona a variao da velocidade
na direo perpendicular direo axial, da forma:
y
=
w
y
w
a
=
w
1y
w
2y
w
a
(4.8)
y
= tg
1
tg
2
(4.9)
Substituindo a Equao 4.8 na Equao 4.6 (ou 4.9) na 4.7, obtm-se:
F
y
= s
y
w
2
a
(4.10)
Para grades de rotores com velocidade circunferencial u, dene-se o coeciente de vazo
como:
=
w
a
u
(4.11)
que se transforma, para o caso sem pr-rotao no lado de suco, em:
=
1
tg
1
(4.12)
Apesar de sua simplicidade, o desenvolvimento acima extremamente importante, visto
que as Equaes 4.4 e 4.6 ou 4.7 permanecem vlidas apesar das perdas de presso causadas
pelos efeitos viscosos no escoamento. No caso das grades de retardamento, aplicadas em com-
pressores, onde p
2
> p
1
, a reao axial sobre as ps d origem ao empuxo axial, que deve ser
compensado, ou suportado pelos mancais (ou carcaa da mquina, no caso de um estator). O
mesmo ocorre para as grades de acelerao, neste caso com p
1
> p
2
. As foras de arrasto,
porm, tem a mesma direo e sentido em ambos os tipos de grade, se somando ou subtraindo
ao efeito da diferena de presses. Isto ser visto em mais detalhes no tem 4.2.4.
34 Captulo 4. Escoamento em Grades
4.2.2 Perdas de Energia
O atrito do uido com a superfcie molhada dos pers da grade gera uma degradao
de parte da energia total do escoamento, com uma parcela da entalpia sendo transformada em
energia interna do uido que passa pela grade. Esta parcela de energia degradada vista, para
uidos incompressveis, como uma diminuio da presso total do uido p
v
no escoamento.
Estas perdas podem ser quanticadas utilizando a equao da energia para sistemas adiabticos
e incompressveis:
p
1
+
1
2
w
2
1
=
p
2
+
1
2
w
2
2
+
p
v
(4.13)
onde:
p
v
= (p
1
p
2
) +
1
2
(w
2
1
w
2
2
) (4.14)
Visto que w
2
1
w
2
2
= (w
2
1y
+ w
2
a
) (w
2
2y
+ w
2
a
) = (w
1y
+ w
2y
)(w
1y
w
2y
) e substituindo as
Equaes 4.4 e 4.6 na Equao 4.14, obtem-se:
p
v
=
1
s
_
F
x
+
1
2
(w
2
1
w
2
2
)
_
=
1
s
_
F
x
+
1
2
w
2
a
(w
1y
w
2y
)
w
a
(w
1y
+ w
2y
)
w
a
_
=
1
s
(F
x
+ F
y
tg
) (4.15)
onde tg
=
1
2
( tg
1
+ tg
2
).
Ensaios em tnel de vento fornecem os valores da perda de presso total que so medidos
de uma maneira direta. Porm, para aumentar a generalidade dos resultados, estes so apre-
sentados em uma forma adimensional. Nesses ensaios, as velocidades na entrada w
1
ou w
a
so
imediatamente disponveis, por isto estas velocidades so as escolhas naturais para o clculo de
uma presso dinmica de referncia. A forma adimensional da perda de presso total assim
obtida denindo-se os coecientes de perda de presso, que so expressos como a razo entre
as perdas de presso total e a presso dinmica caracterstica ao escoamento. Os coecientes
mais comumente encontrados na literatura so:
v
=
p
v
1
2
w
2
a
(4.16)
e:
v
=
p
v
1
2
w
2
1
(4.17)
4.2. Anlise Integral Bidimensional 35
Nestes coecientes, no existem ainda parmetros geomtricos que os liguem grade.
Esta ligao aparecer apenas quando forem denidos os coecientes de arrasto e sustentao,
anlogos aos coecientes para asas isoladas.
4.2.3 Circulao e o Teorema de Kutta-Joukowsky
A circulao em torno da p , calculada sobre a superfcie de contorno, por unidade de
comprimento, dada por:
=
_
SC
w nds (4.18)
Novamente, as fronteiras peridicas da superfcie de controle se cancelam durante a inte-
grao. Desta maneira, a circulao ao redor de um elemento de p dada por:
= s(w
1y
w
2y
) (4.19)
Reescrevendo as Equaes 4.6 e 4.5 utilizando a Equao 4.19, obtm-se:
F
x
=
(w
1y
+ w
2y
)
2
(4.20)
e:
F
y
= w
a
(4.21)
A fora resultante na p F =
_
F
2
x
+ F
2
y
. Denominando w
a mdia vetorial de w
1
e
w
2
, cujos componentes so w
a
e
1
2
(w
1y
+ w
2y
), Figura 4.2, a fora sobre a p torna-se:
F = w
(4.22)
A Equao 4.22 o Teorema de Kutta-Joukowsky, neste contexto aplicado a uma grade de
ps. importante notar que, com o aumento do espaamento entre as ps de modo a s ,
w
1
e w
2
passam a ter a mesma magnitude e direo, donde w
1
= w
2
= w
. Assim, a Equao
4.22 vlida tanto para o caso de aeroflio isolado quanto para o caso de aeroflios dispostos
em grade.
Voltando agora Equao 4.8, percebe-se sua similaridade Equao 4.19. Combinando
estas duas, obtm-se:
y
=
1
w
a
s
(4.23)
36 Captulo 4. Escoamento em Grades
Considerando que a circulao pode ser expressa na forma do produto da corda c do perl pela
velocidade w
e a circulao sobre um perl similar de corda unitria e velocidade incidente
tambm unitria, a circulao unitria
u
dada por:
u
=
c w
(4.24)
Substituindo-se a Equao 4.24 na Equao 4.23, obtm-se:
y
=
w
w
a
c
s
u
=
u
cos
(4.25)
Esta relao entre a circulao e o coeciente de deexo da grade importante visto que
o conhecimento da distribuio de velocidades e do comprimento molhado aproximado so o
que se dispe nos mtodos inversos para o clculo do desempenho da grade. No Captulo 6,
a metodologia de clculo ser desenvolvida e sua base dependente da Equao 4.25 para o
clculo do desempenho das grades.
4.2.4 Sustentao e Arrasto
Da mesma maneira que foram denidos os coecientes de perdas para expressar resul-
tados de ensaios em tneis de vento, as foras efetuadas pelas ps da grade sobre o uido so
tabuladas na forma de coecientes de sustentao e de arrasto. Estes coecientes so expressos
em funo da velocidade w
, de modo que, com o aumento do espaamento entre os elementos
da grade ao limite s , os coecientes de sustentao e arrasto tendem para os valores do
aeroflio isolado. Assim, os coecientes de sustentao (C
L
) e de arrasto (C
D
) so dados por:
C
L
=
L
1
2
w
2
c
(4.26)
C
D
=
D
1
2
w
2
c
(4.27)
Como visto na Figura 4.2, a direo da fora de sustentao normal velocidade w
, e no
caso invscido, possui intensidade L = F. Porm, no caso viscoso, a fora de arrasto, paralela
direo de w
, possui sempre direo contrria ao escoamento, ou seja, a reao sobre as ps
tem a mesma direo e sentido de w
. Isto faz com que, tanto para grades de turbina ou bomba,
exista uma componente
L = F
x
sen
+ F
y
cos
(4.28)
4.2. Anlise Integral Bidimensional 37
A fora de arrasto paralela velocidade w
e seu valor dado por:
D = F
x
cos
+ F
y
sen
(4.29)
Substituindo a Equao 4.15 na Equao 4.29, obtm-se:
D = cos
(F
x
+ F
y
tg
) = sp
v
cos
(4.30)
Pela denio do coeciente de arrasto
v
dado pela Equao 4.16, vem que:
D =
1
2
v
w
2
a
s cos
(4.31)
Substituindo a Equao 4.27 em 4.31, obtm-se:
C
D
=
1
2
v
w
2
a
s cos
1
2
w
2
c
C
D
=
v
cos
_
w
a
w
_
2
s
c
C
D
=
v
cos
3
(4.32)
onde = c/s. Substituindo agora a Equao 4.30 na Equao 4.28 a m de eliminar F
x
:
L = (F
y
tg
) sp
v
) sen
+ F
y
cos
L =
F
y
cos
( sen
2
+ cos
2
) sp
v
sen
(4.33)
As Equaes 4.7 e 4.33 so substitudas na Equao 4.26, obtendo-se:
C
L
=
sw
2
a
( tg
1
tg
2
)
1
2
w
2
cos
c
sp
v
sen
1
2
w
2
c
Utilizando a denio de
v
dada pela Equao 4.16 e de
y
dada pela Equao 4.9:
C
L
=
w
2
a
w
2
_
2( tg
1
tg
2
)
cos
v
sen
_
C
L
= 2
y
cos
v
cos
2
sen
(4.34)
Em ensaios de grade em tnel de vento, os valores da sustentao so muitas vezes ex-
pressos tambm pela razo entre a sustentao e o arrasto,
L
D
, de maneira anloga das asas
isoladas. Para as grades, esta razo um importante parmetro de desempenho, denominado
em aerodinmica razo de planeio. Este parmetro est diretamente ligado ao alcance de vo,
38 Captulo 4. Escoamento em Grades
ou seja, maior distncia percorrida em vo planado (sem motor). Ele uma medida da qual-
idade aerodinmica da asa. Analogamente, a razo entre o arrasto e a sustentao est tambm
relacionada ao desempenho da grade, como ser visto adiante. Calcula-se ento:
L
D
=
C
L
C
D
=
2 cos
v
cos
2
sen
v
cos
3
C
L
C
D
= 2
v
sec
2
tg
(4.35)
Figura 4.3: Velocidades e foras de reao para grades. De Schlichting e Scholz (1951).
Na Figura 4.3, dene-se o ngulo entre a fora resultante e a fora de sustentao como:
= arc tg
_
C
D
C
L
_
Para grades operando em regies de bom desempenho, o valor de C
D
muito menor que o valor
de C
L
. Assim:
C
D
C
L
(4.36)
O parmetro denominado na literatura como coeciente de escorregamento, que , em
4.3. A Camada-Limite 39
aproximao, equivalente razo de planeio de um aeroflio grade. Ser visto mais tarde que
este coeciente de grande importncia para o projeto de grades de turbomquinas.
O efeito causado pelo arrasto se manifesta, para todos os tipos de grade, na forma de uma
diminuio do valor da presso p
2
em relao presso para o escoamento sem arrasto viscoso.
Seja p
2id
a presso deste escoamento invscido. Tem-se, assim, para grades de acelerao p
1
p
2
> p
1
p
2id
e para grades de retardamento p
2
p
1
< p
2id
p
1
, de modo que, em todos os
casos p
2
< p
2id
. Assim, a perda de presso total dada por p
v
= p
2
p
2id
. Na Figura 4.3
visto o diagrama de foras para diferentes tipos de grade. Pelo fato da direo do arrasto ser a
mesma da velocidade w
, seu efeito o de se adicionar fora de empuxo axial F
x
para o caso
de turbinas e diminu-lo para o caso de bombas. A reao resultante sobre as ps F assim
tambm maior em turbinas que em bombas, se comparadas ao escoamento ideal (Schlichting e
Scholz, 1951).
4.3 A Camada-Limite
A perda de presso total, p
v
, causada pela viscosidade do uido, pode ser tratada uti-
lizando a teoria da camada-limite. O desenvolvimento da camada se d a partir do ponto de
estagnao em cada um dos pers aerodinmicos presentes na grade, at o bordo de fuga deste
perl, em seus lados superior e inferior. A Figura 4.4 mostra em esquema o desenvolvimento da
camada-limite. Nesta gura, podem-se ver as espessuras
s
e
p
, localizados respectivamente
Figura 4.4: Esquema mostrando o desenvolvimento da camada-limite ao redor de um dos pers da
grade.
nos lados de suco e presso do perl aerodinmico mostrado. Estas espessuras se referem ao
40 Captulo 4. Escoamento em Grades
chamado
99
, ou seja, a distncia entre a parede e o ponto onde a velocidade do uido 99% da
velocidade da corrente no-perturbada. A chamada espessura de deslocamento
distncia
que deve ser diminuda da seco por onde passa o escoamento para que seja satisfeita a con-
tinuidade, no caso de escoamento invscido de velocidade igual velocidade no-perturbada.
No detalhe C da Figura 4.4, pode ser vista a espessura de deslocamento
s
, equivalente ao lado
de suco do perl. Ainda nessa gura, pode-se notar imediatamente jusante do perl um
aumento da velocidade da corrente livre, devido ao efeito de bloqueio causado pelo desenvolvi-
mento da camada-limite. A espessura de deslocamento a que faz com que a rea A seja igual
rea A
. A expresso equivalente , assim:
=
_
0
_
1
v(n)
w
ext
_
dn (4.37)
onde w
ext
a velocidade externa camada no-perturbada pela interao viscosa com a p.
Figura 4.5: Escoamento na sada da grade, e desenvolvimento da camada-limite.
Para o caso da grade, somente faz sentido a integrao de 0 at o espaamento entre as ps
(s s
p a
), para a espessura da p s
p a
. No bordo de fuga das ps, s
p a
= t
te
, e a Equao 4.37
torna-se:
=
_
s
0
_
1
v(n)
w
2
_
dn =
s
+ t
te
+
p
(4.38)
notando que w
2
= w
ext
.
4.3. A Camada-Limite 41
O comprimento
resultado da integrao na direo n. Na sada da grade, efetuada
uma mudana de coordenadas de n (coordenada da p) para y, a coordenada da grade. O
ngulo entre o escoamento do uido ideal (invscido) de velocidade w
2id
e a direo x dado
por
2id
, como visto na Figura 4.5. Desse modo, n = y cos
2id
, e dn = dy cos
2id
sada da
p. Adimensionalizando a espessura de deslocamento em relao ao espaamento entre as ps,
tm-se:
s
+ t
te
+
p
s cos
2id
=
_
1
0
_
1
v(y)
w
2
_
d
_
y
s
_
(4.39)
A espessura de quantidade de movimento , de modo anlogo espessura de deslocamento,
integrada imediatamente a jusante da grade, produz:
=
s
+
p
s cos
2id
=
_
1
0
_
v(y)
w
2
__
1
v(y)
w
2
_
d
_
y
s
_
(4.40)
Nestas equaes h a velocidade para o escoamento potencial w
2id
e a velocidade w
2
considerando os efeitos da camada-limite. Considerando a continuidade do meio uido, estas
velocidades se relacionam por:
w
2
=
w
2id
1
(4.41)
Da mesma maneira, a presso imediatamente a jusante da grade se relaciona presso pura-
mente potencial pela equao de Bernoulli:
p
2
= p
2id
2
w
2
2id
_
1
(1
)
2
1
_
(4.42)
Apesar da inuncia dos efeitos da camada-limite serem sentidos por toda a corrente u-
ida, toma-se, por aproximao, o ngulo do escoamento sada da grade como sendo igual (em
mdia) tanto para o escoamento potencial como para o corrigido pela espessura de desloca-
mento, ou seja,
2
=
2id
.
Ser equacionado agora o escoamento a jusante da grade. Inicialmente, pela equao da
continuidade; a componente x da velocidade dada por:
w
1x
= w
a
= w
2id,x
= w
2x
= w
2id
cos
2id
= w
2
cos
2
(4.43)
Resultando:
w
2
w
2id
=
cos
2id
cos
2
(4.44)
42 Captulo 4. Escoamento em Grades
Equao da quantidade de movimento na direo y:
_
1
0
w
2y
(w
2
.n)d
_
y
s
_
= sen
2id
cos
2id
_
1
0
w
2
(y)d
_
y
s
_
= sen
2
cos
2
w
2
2
(4.45)
Dividindo ambos os lados da Equao 4.45 por w
2
e somando e subtraindo w(y)/w
2
, obtm-
se:
sen
2id
cos
2id
_
1
_
1
0
v(y)
w
2
_
1
v(y)
w
2
_
d
y
s
_
1
0
_
1
v(y)
w
2
_
d
y
s
_
=
sen
2
cos
2
w
2
2
w
2
2
(4.46)
Substituindo as Equaes 4.39 e 4.40, obtm-se:
sen
2id
cos
2id
(1
) = sen
2
cos
2
w
2
2
w
2
2
(4.47)
Empregando agora as Equaes 4.41 e 4.44, tem-se:
sen
2id
cos
2id
(1
) = sen
2
cos
2
cos
2
2id
(1
)
2
cos
2
2
(4.48)
Assim:
tg
2
tg
2id
=
1
(1
)
2
= (4.49)
Desta forma, o ngulo de sada do escoamento
2
pode ser expresso como uma funo do
ngulo de escoamento ideal, e de parmetros da camada-limite. Vale lembrar que a espessura
de deslocamento
inclui a espessura da p no bordo de fuga, t
te
(Figura 4.4).
Agora, a equao da quantidade de movimento na direo x:
cos
2
2id
_
1
0
w
2
(y)d
y
s
+ p
2
= w
2
2
cos
2
2
+ p
2
(4.50)
Como anteriormente, dividindo por 1/2w
2
2
e somando e subtraindo w(y)/w
2
, esta equao
torna-se:
p
2
p
2
w
2
2id
= 2 cos
2
2id
_
1
(1
)
2
1
_
= 2( 1) cos
2
2id
(4.51)
Substituindo agora a Equao 4.42 em 4.51 e desenvolvendo, chega-se a:
p
2id
p
2
2
w
2
2id
=
_
1
(1
)
2
1
_
2( 1) cos
2
2id
(4.52)
4.4. A Ecincia da Grade 43
A perda de energia atravs da grade, p
v
, pode ser expressa como a perda da presso total entre
o escoamento ideal e real a jusante da grade:
p
v
= p
2id
+
2
w
2
2id
_
p
2
+
2
w
2
2
_
(4.53)
Substituindo 4.53 em 4.52:
p
v
2
w
2
2id
=
_
1
(1
)
2
1
_
2( 1) cos
2
2id
+ 1
w
2
2
w
2
2id
(4.54)
Combinando as Equaes 4.49 e 4.44, mostra-se que:
w
2
w
2id
=
_
2
sen
2
2id
+ cos
2
2id
(4.55)
Substituindo em 4.54, chega-se a:
p
v
2
w
2
2id
=
_
1
(1
)
2
1
_
2( 1) cos
2
2id
(
2
1) sen
2
2id
(4.56)
Finalmente, substituindo a Equao 4.16 em 4.56, obtm-se a forma para o coeciente de perda
v
:
v
=
p
v
1
2
w
2
a
=
1
cos
2
2id
__
1
(1
)
2
1
_
2( 1) cos
2
2id
(
2
1) sen
2
2id
_
(4.57)
4.4 A Ecincia da Grade
Foram vistos anteriormente os 3 tipos principais de grade: geradora, de desvio e motora.
Para cada uma destas grades, a ecincia pode ser denida de uma forma que depende de sua
funo principal. Assim, e ecincia de uma grade motora pode ser expressa como a razo da
diferena de energia cintica antes e depois da grade, e da diferena de presso esttica entre as
mesmas posies. Utilizando este enunciado em conjunto com a Equao 4.14, tem-se:
T
=
2
w
2
2
w
2
1
p
1
p
2
= 1
p
v
p
1
p
2
(4.58)
Lembrando que p
1
p
2
= q
2
q
1
+p
v
(onde q
i
= 1/2w
2
i
), w
i
= w
a
/ cos
i
, e considerando
a Equao 4.16 vem que:
T
= 1
1/2w
2
a
v
1/2w
2
a
(sec
2
2
sec
2
1
+
v
)
(4.59)
44 Captulo 4. Escoamento em Grades
A parcela sec
2
2
sec
2
1
equivalente a 2
y
tg
1
. A Equao 4.59 torna-se, assim:
T
= 1 +
v
2
y
tg
v
(4.60)
Desenvolvendo um pouco mais, aplicando a Equao 4.35 e a denio do coeciente de escor-
regamento, aproximada para a razo de planeio, (Equao 4.36):
v
=
1 tg
2 sec
2
(4.61)
Aplicando a Equao 4.61 em 4.60, e lembrando que sec
2
= 1+ tg
2
, chega-se, aps alguma
manipulao (no mostrada), a:
T
=
1 + tg
1 cotg
(4.62)
Deve ser lembrado ao se utilizar a equao acima, que as grades motoras, ou de turbinas,
somente ocorrero segundo a nomenclatura utilizada para ngulos
negativos. Esta limitao
no ocorre na literatura alem, cuja conveno de ngulos parte de 0 a , ao passo que a con-
veno ora utilizada de (/2, /2). O cuidado a ser tomado, neste caso, o de inverter a
grade de estator ou rotor, bem como as componentes de velocidades relativas, antes da anlise e
de volt-las ao estado anterior para prosseguir a anlise da grade seguinte. Isto de modo algum
causa perda de generalidade a esta conveno, visto que alteraes similares devero ser feitas
a qualquer outra conveno que porventura venha a ser adotada.
Para grades ditas geradoras, ou de retardamento do uxo, a ecincia obtida de maneira
similar. Nestas grades, porm, sua ecincia medida em relao elevao de presso esttica
obtida entre estaes a montante e a jusante de si. A equao para as grades de retardamento
pode ser ento expressa como:
B
=
p
2
p
1
q
1
q
2
= 1
p
v
q
1
q
2
(4.63)
Desenvolvendo, tem-se:
B
=
1 cotg
1 + tg
(4.64)
Em ambas as equaes, nota-se que, para um dado ngulo
xo, a ecincia das grades
tanto geradoras como motoras aumentada coma diminuio do coeciente de escorregamento.
Este coeciente um claro indicativo da qualidade de uma grade de ps. Mais, vericando a
razo C
D
/C
L
dada pela Equao 4.35, v-se que, para uma dada condio operacional
2
, as
1
A manipulao trigonomtrica necessria simples, e no ser mostrada aqui.
2
Ou seja, xados os ngulos de escoamento na entrada e sada da grade, ou xado
.
4.4. A Ecincia da Grade 45
perdas de uma grade geradora ou motora so uma funo de
v
/
y
e que minimizar as perdas
equivale equao seguinte:
Max[
T,B
] Min
_
y
_
(4.65)
Para as grades de desvio, apenas os nveis de energia entre jusante e montante so rela-
cionados, visto esta grade no objetivar transformaes de presso em velocidade, ou vice-
versa. Considerando os referenciais de energia do uido dados por E
1
= p
1
+q
1
e E
2
= p
2
+q
2
,
tm-se:
D
=
E
2
E
1
=
p
2
+ q
2
p
1
+ q
1
(4.66)
Reajustando o referencial de energia, considera-se p
2
= 0. A equao da energia torna-se ento
p
1
+ q
1
= q
2
+ p
v
, donde:
G
=
q
2
p
v
+ q
2
=
1
1 +
v
1/2w
2
a
1/2w
2
2
=
1
1 +
v
cos
2
2
(4.67)
Esta ltima denio de ecincia se aplica a qualquer grade axial. De modo especco para
grades mveis, porm, outras denies de ecincia so possveis, utilizando os conceitos de
trabalho especco da p (Y
p a
) e do uido (Y ). Ser aqui denido, para grades geradoras, a
ecincia em funo do trabalho especco. Nestas, o trabalho especco transformado pelo
uido dado por Y = Y
p a
Z
v
. Para turbinas, Y = Y
p a
+ Z
v
(Peiderer e Petermann, 1974).
Da Equao de Euler, aplicada a uma grade linear de rotor, o trabalho especco das ps Y
p a
:
Y
p a
= uw
u
= u(w
2
sen
2
w
1
sen
1
) = u(w
a
tg
2
w
a
tg
1
) (4.68)
Dene-se o coeciente de presso como:
=
2Y
u
2
(4.69)
Considerando que Z
v
constitudo apenas pelas perdas de presso na grade p
v
/, e
substituindo-se na Equao 4.69, tem-se:
= 2
Y
p a
Z
v
u
2
= 2
uw
u
v
w
2
a
/2
u
2
=
2w
a
y
u
v
_
w
a
u
_
2
(4.70)
Da denio do coeciente de vazo (Equao 4.12), vem:
= (2
y
v
) (4.71)
46 Captulo 4. Escoamento em Grades
lembrando que a Equao 4.71 vlida apenas para grades geradoras. A ecincia pode ser
denida como:
B,Y
=
Y
Y
p a
= 1
Z
v
Y
p a
(4.72)
Desenvolvendo, chega-se a:
B,Y
= 1
1
2
w
2
a
w
a
u
y
= 1
1
2
y
(4.73)
onde se v mais uma vez o parmetro
v
/
y
denindo a ecincia da grade.
4.5 Recapitulao
Neste captulo foram vistas as denies de grade aerodinmica e a nomenclatura uti-
lizada no desenvolvimento do presente trabalho. Foi aqui desenvolvida a formulao necessria
ao clculo do desempenho e ecincia de uma grade motora, geradora, ou de desvio, por meio
da formulao integral do escoamento. O uso do Teorema de Kutta-Joukowsky para o clculo
da deexo do escoamento causada pela grade e o efeito da camada-limite so de fundamental
importncia para a estimativa do desempenho das grades no mtodo inverso de clculo.
Captulo 5
Algoritmos Genticos de Otimizao
5.1 Introduo
Neste captulo sero vistos os conceitos bsicos dos algoritmos genticos, em especial do
NSGA II, muito utilizado na otimizao multi-objetivo e tambm empregado neste trabalho.
Em especial, sero analisados os conceitos bsicos de dominncia de solues e de optimali-
dade de Pareto. Objetiva-se com a explanao destas ferramentas facilitar a compreenso da
metodologia de otimizao desenvolvida neste trabalho.
5.2 GAs: Heurstica do Mtodo
Algoritmos genticos (GAs) de otimizao so baseados nos princpios de seleo natu-
ral, e da gentica. Embora tenham sido apresentados sistematicamente por Holland, na dcada
de 1970, as idias bsicas de anlise e projeto inspirados pela evoluo biolgica podem ser
encontradas no trabalho de Rachenberg (Rao, 1996) . Foi observado por Weise (2009) que Bar-
ricelli e Fraser, porm, j utilizavam simulaes por computador por volta da metade da dcada
de 1950, a m de obter melhor compreenso dos processos naturais de evoluo e seleo. Hoje
em dia, de especulaes na rea de biologia, os algoritmos genticos passaram a ser utilizados
na otimizao de sistemas aplicados nas mais diversas reas das cincias exatas e da economia.
Em termos gerais, nos algoritmos genticos os parmetros de projeto so agrupados em
um vetor x = [x
1
, x
2
, . . . , x
p
], x
i
S, onde S o espao de solues possveis para o sistema
que se deseja otimizar. Cada um dos vetores possveis x chamado de indivduo e o conjunto
de todos os indivduos de populao. A cada indivduo est associado o valor de uma funo
desempenho f. Este desempenho o objetivo da otimizao e a funo objetivo f chamada
de funo de adaptao
1
. Este nome caracterstico remete origem eurstica do mtodo, ou
1
Do ingls tness function.
47
48 Captulo 5. Algoritmos Genticos de Otimizao
seja, indivduos mais adaptados ao seu ambiente e competio pelos recursos naturais pos-
suem maior chance de sobreviver e deixar descendentes. Por meio de seu desempenho (f), os
indivduos da populao so classicados. A populao passa por processos de cruzamento e
mutao, gerando novos indivduos, que so tambm classicados e unidos populao origi-
nal. Os indivduos menos aptos so eliminados durante a fase de seleo e o processo repetido
at ser atingido um critrio de parada pr-denido. Na Figura 5.1, pode ser visto o uxograma
do processo. As operaes de cruzamento e mutao so aleatrias, porm os indivduos mais
aptos possuem maiores chances de se reproduzirem. Este antagonismo faz com que o mtodo
possua direo denida de convergncia, isto , enquanto as operaes de cruzamento e mu-
tao causam o aumento e diversicao da populao, a seleo causa a reduo da populao,
de uma maneira controlada (Beyer e Sendhoff, 2007).
Figura 5.1: Fluxograma bsico de um algoritmo gentico (Sivanandam e Deepa, 2008).
Algumas das vantagens dos algoritmos genticos so:
O mtodo no requer o conhecimento das derivadas de f, o que permite que seja utilizado
em espaos de soluo descontnuos;
capaz de escapar de timos locais e buscar o timo global;
facilmente modicado para tratar problemas diferentes;
5.3. Operadores de Populao nos GAs 49
naturalmente paralelizvel;
Pode ser concatenado a outros algoritmos de otimizao (hibridizao);
Pode tratar funes f com mais de um objetivo (problemas multi-objetivo).
Porm, h tambm desvantagens:
um mtodo populacional e exige um grande nmero de avaliaes da funo de adap-
tao;
H o problema da escolha de parmetros como nmero de indivduos, taxas de cruza-
mento e mutao, e estratgias de seleo;
O mtodo tem problemas para encontrar o valor exato do timo. Um segundo algoritmo
otimizador pode ser utilizado na fase nal, de reno da soluo (hibridizao).
Estas desvantagens so equilibradas em parte pelas vantagens apresentadas. E para a
escolha das caractersticas dos operadores da populao (cruzamento, mutao e seleo) e
das condies de parada, diferentes tcnicas esto disposio do usurio. Na prxima seo,
algumas delas sero delineadas, para melhor compreenso do funcionamento dos algoritmos
genticos.
5.3 Operadores de Populao nos GAs
A adaptao natural ao meio ambiente de boa parte dos seres vivos depende de maneira
fundamental dos processos de cruzamento e mutao. Ambos possuem em sua essncia o
acaso, representado pela combinao aleatria de trechos do genoma de dois indivduos
(cruzamento) e de erros na transcrio desse cdigo (mutao). De maneira anloga aos
processos naturais, os algoritmos computacionais imitam estes processos para a evoluo de
suas populaes.
Deve-se diferenciar em princpio os termos gentipo e fentipo de um indivduo. O termo
fentipo se refere aos valores das variveis de projeto, que caracterizam este indivduo, com
relao ao modelo utilizado para o clculo da adaptao. Por exemplo, o raio de curvatura do
bordo de ataque, a espessura mxima a uma certa posio da corda, o arqueamento mximo
da linha de esqueleto, so todas caractersticas que denem o fentipo de um aeroflio. O
gentipo a representao do fentipo em termos de cromossomo. Este cromossomo, para o
algoritmo, pode ser a concatenao do fentipo representado em forma binria, octal, decimal
real ou inteira, ou valores diversos, que sofrem diretamente a operao. A Figura 5.2 mostra
em esquema essa representao, das diversas maneiras de transformar o fentipo em gentipo e
50 Captulo 5. Algoritmos Genticos de Otimizao
sua concatenao, formando o cromossomo de um dos indivduos da populao. A maneira de
representar o fentipo na forma de cromossomo denominada codicao. Ainda nesta gura,
exemplicam-se as representaes do fentipo na forma binria, octal, real, ou outros tipos de
prepresentao.
Figura 5.2: Representao do gentipo e fentipo do vetor de parmetros de projeto x.
O ciclo de cruzamento engloba a escolha dos indivduos-pais e a seguir, a combinao
de seu gentipo para a criao de novos indivduos. Esta escolha, via de regra, privilegia os
indivduos com maiores valores de adaptao, porm uma nfase muito grande no valor da
adaptao para a escolha dos indivduos-pais pode causar uma convergncia prematura em di-
reo a um timo local, pela eliminao da diversidade da populao. Diferentes mtodos de
escolha possuem maior ou menor grau de nfase na funo adaptao. Os principais so:
Seleo por Roleta: Para um nmero N de indivduos a serem selecionados para cruza-
mento montada uma roleta, cujo setor correspondente a cada indivduo da populao
proporcional ao valor de sua adaptao f. A roleta girada N vezes e os indivduos
que param sob o marcador so escolhidos. O giro da roleta aleatrio, o que permite
que indivduos com baixo valor de adaptao tambm sejam escolhidos, alm de uma
melhor explorao do espao de solues. Por outro lado, se a discrepncia entre valores
de adaptao muito grande, h o predomnio de alguns indivduos somente, e portanto
uma rpida diminuio da diversidade.
Seleo por Torneio: N grupos de indivduos, de tamanho N
T
, so escolhidos aleato-
riamente e os indivduos com melhor adaptao em cada grupo so escolhidos para o
cruzamento.
Seleo por Classicao: Em casos de grande diferena nos valores de adaptao, ao
invs do uso do valor de f, aos indivduos dado o valor de sua posio na classicao,
5.3. Operadores de Populao nos GAs 51
ou seja, 1 para o pior indivduo, 2 para o segundo pior, at N para o melhor indivduo.
Em seguida, um segundo mtodo como a roleta ou o torneio, podem ser utilizados. A
convergncia mais lenta, porm a diversidade melhor preservada.
Seleo por Amostragem Estocstica: A cada indivduo associado um comprimento
determinado em uma reta proporcional sua adaptao e um nmero N de ponteiros igual
ao nmero de indivduos a serem escolhidos so distribudos sobre a reta, igualmente
espaados. Os indivduos sobre os quais houver um ponteiro so escolhidos.
Seleo Aleatria: Os indivduos so escolhidos aleatoriamente, sem a ponderao da
adaptao f. Uma maior ruptura dos gentipos mais adequados pode acontecer, levando
a convergncias mais lentas.
Escolhidos os indivduos, a combinao do gentipo pode ser efetuada de vrias maneiras,
dependendo do tipo e de como os genes so agrupados. No caso de genes contendo os valores
reais do fentipo, uma mdia ponderada entre os valores pertencentes a dois (ou mais) indiv-
duos, mostrado na Equao 5.1, com pesos aleatrios r pode ser adotada:
Gene
nal
= (1 r) Gene
1
+ r Gene
2
(5.1)
Caso os genes possuam os valores do fentipo transformados em binrios, pode-se fazer tanto
trocas de partes do genoma em pontos aleatrios, como trocas bite a bite, vistas na Figura 5.3
(notar a troca de genes, ou cruzamento, dos indivduos-pais para formar o indivduo-lho, e a
troca aleatria de bits na mutao).
Figura 5.3: Cruzamento e mutao na gerao dos descendentes no GA.
A mutao aplicada aps a combinao dos genes. Seu objetivo principal o de permitir
que a populao escape de timos locais, aumentando a sua diversidade. A probabilidade de
mutao pode variar, porm probabilidades muito elevadas transformam o algoritmo gentico
em puramente aleatrio.
52 Captulo 5. Algoritmos Genticos de Otimizao
O ltimo passo no ciclo de otimizao da populao a substituio dos indivduos exce-
dentes. Esta substituio pode ser feita eliminando os indivduos com menor adaptao, ou,
em cada grupo de pais e lhos, os indivduos menos adequados so eliminados, mantendo o
mesmo nmero nal de elementos. Uma outra maneira de efetuar a mudana o de escolher os
indivduos a serem eliminados aleatoriamente. H o risco de se retirar da populao indivduos
com altos ndices de adaptao. Contra essa possibilidade, alguns algoritmos genticos no
permitem que os melhores indivduos sejam eliminados, sendo automaticamente inseridos na
gerao seguinte. Estes algoritmos so chamados elitistas.
5.4 Critrios de Parada
Os principais critrios de parada utilizados so:
Mximo Nmero de Geraes: O GA terminado quando se atinge um certo nmero
de geraes.
Mximo Tempo de Processamento: Aps decorrido um tempo especicado de proces-
samento, caso nenhum outro critrio atue, o algoritmo terminado;
Invarincia do Melhor Indivduo: O GA terminado caso o melhor indivduo no seja
mudado aps um certo nmero de geraes;
Invarincia da Melhor Adequao: Se aps um determinado nmero de geraes, a
mudana no valor da melhor adaptao for menor que a tolerncia especicada, o algo-
ritmo terminado;
Melhor Adequao Individual: O GA terminado assim que o valor da adaptao do
melhor indivduo ca abaixo de um valor especicado;
Pior Indivduo: Assim que a adaptao do pior indivduo car abaixo de um certo valor,
o algoritmo parado. Isto garante que toda a populao tenha convergido para uma certa
faixa de tolerncia.
Estes critrios no so capazes de indicar se o timo global foi atingido; este um dos
pontos fracos do mtodo. O usurio deve, ento, usar de bom senso ao decidir a respeito do nal
do processamento. Porm, em muitos casos, o que se deseja apenas uma melhoria compara-
tiva, isto , partindo de um modelo pr-existente, o processo de otimizao visa obter projetos
com melhores ndices de desempenho. Alguns mtodos possuem convergncia garantida, como
o caso do mtodo de recozimento simulado
2
(Weise, 2009). Porm, a convergncia garan-
tida, neste caso, quando o tempo simulado de recozimento (ou o nmero de iteraes) tende
2
Do ingls Simulated Annealing
5.5. Algoritmos Genticos Multiobjetivo 53
a innito (Weise, 2009). Para os objetivos do presente trabalho foi reconhecido que, apesar
da convergncia dos algoritmos genticos no ser provada, estes algoritmos possuem uma car-
acterstica importante para o projeto robusto: a presena de uma populao, que sofre efeitos
de cruzamento e mutao, de certa maneira aleatrios, pode tornar o mtodo robusto por si
s (Beyer e Sendhoff, 2007). Esta armao no provada, mas h indcios de que ela possa
ser verdadeira. Por este motivo, a maioria dos trabalhos na rea ainda adiciona os efeitos das
incertezas nos valores de projeto de maneira direta, ou seja, como um segundo objetivo. Ser
visto na prxima seo os fundamentos de otimizao gentica multiobjetivo, com nfase no
algoritmo NSGA II
3
5.5 Algoritmos Genticos Multiobjetivo
Da mesma forma que no procedimento para os algoritmos genticos mono-objetivo, os al-
goritmos multiobjetivo trabalhamcoma populao classicada conforme sua adaptao. Porm,
a classicao da populao pode feita de modo diverso. Isto depende de como os mltiplos
objetivos so tratados. Muitos destes objetivos so conitantes entre si e, a menos que haja uma
funo de importncia que dena sua relao, eles devem ser encarados como igualmente
valiosos. Este o fundamento da Anlise de Pareto, que ser abordada mais frente.
A maneira mais simples de se tratar diversos objetivos o de transformar a funo de
adaptao em uma mdia ponderada dos vrios objetivos f = [f
1
, . . . , f
k
]:
g(f ) =
k
i=1
w
i
f
i
(5.2)
O conhecimento dos pesos w
i
introduz, porm, uma nova questo: como quanticar a
importncia de cada objetivo em relao aos outros. Na Figura 5.4 a), pode ser visto que a
razo entre os pesos p
1
e p
2
pode alterar signicativamente o ponto de timo capaz de ser
obtido. Outros problemas, relacionados impossibilidade de se encontrar algumas solues em
espaos no-convexos, so discutidos em Deb (2001).
O tratamento de alguns dos objetivos como restries tambm feito. Um dos perigos
desta tcnica a de se restringir em excesso, ou de modo insuciente, o espao de solues (ver
a Figura 5.4 b).
Em extenso a essas tcnicas, a Anlise de Pareto se fundamenta nos conceitos de no-
dominncia e de optimalidade de Pareto. A dominncia de uma soluo sobre outra consiste na
comparao de todos os objetivos destas solues um a um. Uma soluo x
1
domina a soluo
x
2
se as duas condies abaixo forem vlidas:
3
Do ingls Non-Dominated Sorting Genetic Algorithm.
54 Captulo 5. Algoritmos Genticos de Otimizao
Figura 5.4: Tcnicas otimizao multiobjetivo, por pesos (a) e restries (b).
1 - A soluo x
1
no pior que a soluo x
2
em todos os objetivos, ou seja, f
i
(x
1
) f
i
(x
2
)
para todo i = 1, 2, . . . , k.
2 - A soluo x
1
melhor que x
2
em pelo menos um objetivo, ou f
i
(x
1
) f
i
(x
2
) para pelo
menos um i 1, 2, . . . , k.
Cabe aqui a denio dos smbolos matemticos utilizados para denotar a relao de dom-
inncia entre duas solues. Seja M o nmero de funes objetivo de um dado problema de
otimizao. O smbolo de relao entre duas solues i e j, do tipo i j, signica que a
soluo i melhor que a soluo j em um objetivo particular, enquanto i j signica que i
pior que a soluo j. Isto vale tanto para problemas de minimizao quanto para maximizao
(notao segundo Deb (2001)).
Assim, se ambas as condies forem vlidas, diz-se que: x
2
dominada por x
1
, x
1
no-dominada por x
2
, ou que x
1
no-inferior a x
2
. Caso a primeira condio no seja sat-
isfeita, porm, no se pode armar que uma soluo domina a outra, apenas que ambas so
no-dominadas, ou no-inferiores. Considerando o conjunto P de solues contido no espao
de solues S, o conjunto de solues P
dito no-dominado quando nenhum membro de P
dominante sobre aquelas solues. Assim, chegamos ao conceito de optimalidade de Pareto.
Quando P = S, o conjunto de solues P
chamado de conjunto de solues timas de Pareto.
Porm, durante o processo de otimizao, no se pode dizer que o conjunto de solues no-
dominadas so timos de Pareto. Considerando o conjunto S
que contm as solues dadas
pela populao do algoritmo gentico, o conjunto de solues no-dominadas deve ser o con-
junto de Pareto de S
, para assim direcionar o otimizador corretamente. Na Figura 5.5 podem
ser vistos exemplos (para dois objetivos) de conjuntos timos de Pareto. Estes conjuntos so
chamados Frentes de Pareto, por formarem uma fronteira de solues no-dominadas.
Vrias tcnicas so utilizadas para determinar as frentes de Pareto. A mais simples a de
se vericar, para cada uma das solues de P, se esta soluo dominada por alguma outra,
5.6. O Algoritmo NSGA II 55
Figura 5.5: Frentes de Pareto para combinaes de dois objetivos. De Deb (2001).
ou seja, se existe outra soluo melhor que a vericada em todos os objetivos. As solues
no-dominadas pertencem a P
.
Enquanto esta tcnica encontra apenas o conjunto de solues no-dominadas, alguns
algoritmos genticos necessitam que toda a populao seja classicada segundo sua adaptao.
Isto feito denominando os elementos presentes em P
de solues de nvel 1, e em seguida
retirando temporariamente o conjunto P
de P. Aps isto ser feito, o conjunto de solues no-
dominadas presente em P novamente encontrado. Este segundo conjunto no-dominado
denominado nvel 2 e retirado de P. Sucessivamente, os nveis vo sendo preenchidos, notando
que as solues de nvel inferior dominam as solues de nvel superior, isto P
1
_ P
2
_ P
3
_
. . . _ P
n
(onde a _ b signica que a domina b).
5.6 O Algoritmo NSGA II
O NSGA II um algoritmo de otimizao gentico multiobjetivo elitista, que tambm
possui um mecanismo explcito de preservao de diversidade (Deb, 2001). Foi escolhido para
a execuo deste trabalho por apresentar boas caractersticas de espalhamento de indivduos na
frente de Pareto (Deb et al., 2002), e boa ecincia computacional. Estas caractersticas o trans-
formaram em um padro contra o qual outros mtodos de otimizao multiobjetivo so comu-
mente comparados (Coello, 2006). A sigla NSGA II signica Non-Dominated Sorting Genetic
Algorithm
4
, e se diferencia do algoritmo original NSGA por seu procedimento de preservao
da diversidade.
Neste algoritmo, na gerao t, aps a gerao dos lhos dos indivduos selecionados
4
Algoritmo Gentico com Classicao por No-Dominao
56 Captulo 5. Algoritmos Genticos de Otimizao
(conjunto Q
t
), estes so adicionados populao original (P
t
), e ento todos os indivduos so
classicados segundo seus nveis de no-dominncia. O conjunto ca ento com um nmero de
indivduos bem maior que o permitido para a populao. Assim, os indivduos excedentes, ou
seja, de nveis superiores, so eliminados para se obter a nova populao P
t
. Isto pode ser visto
na Figura 5.6, que ilustra a tcnica.
Figura 5.6: Classicao pelo NSGA II. De Deb (2001).
A principal caracterstica deste algoritmo, melhorada em relao a seu antecessor NSGA,
o seu mecanismo de preservao de diversidade da populao. Ele baseado na noo de dis-
tncia de povoamento
5
. Esta distncia de povoamento se relaciona distncia entre indivduos
de mesmo nvel de no-dominncia, calculada como sendo a mdia dos lados de um cubide
cujos vrtices so os indivduos mais prximos. Isto mostrado na Figura 5.7, para o caso de
dois objetivos. Passam a existir, assim, dois indicadores de qualidade: o nvel de dominncia, e
a distncia de povoamento como segundo critrio. A diversidade favorecida na medida em que
os indivduos que possuam um valor maior de distncia de povoamento (ou seja, em um ponto
pouco povoado do espao de solues) so preferidos, quando comparados a outro elemento de
mesmo nvel de dominncia.
Figura 5.7: Medida da distncia de povamento de um indivduo. De Deb et al. (2002).
A implementao do NSGA II utilizada est presente no software MatLab
6
. Esta verso
5
Do ingls crowding distance.
6
The Mathworks Inc.
5.6. O Algoritmo NSGA II 57
uma variante do algoritmo original desenvolvido por Deb (2001), apenas com maior controle
sobre o elitismo da populao, permitindo uma maior diversidade (Mathworks, 2008). O con-
trole feito especicando a frao da populao que pertence frente de Pareto. Uma maior
parcela da populao na frente de Pareto faz com que haja uma melhor cobertura do espao
de solues, aumentando assim as chances de se encontrar o timo global pelo algoritmo. A
funo chamada pelo comando gamultiobj, aps terem sido inicializados o problema, as
restries, e as opes.
O problema:
Funo Objetivo - a mtrica da qualidade dos individuos, ou seja, a funo de adap-
tao para os vrios objetivos. Os valores dos objetivos de cada indivduo devem ser
armazenados em um vetor.
Nmero de Variveis - O nmero de variveis independentes a serem otimizadas.
sujeito s restries:
Inequaes Lineares - Do tipo A x b, especicados pela matriz A e vetor b.
Equaes Lineares - Especicada como A
eq
x = b
eq
.
Limites - As variveis de projeto contidas no vetor x so limitadas por valores inferiores e
superiores, isto , li
i
x
i
ls
i
, onde ls e li so os vetores de limites superior e inferior,
respectivamente.
As opes:
Populao - O gentipo dos indivduos pode ser denido como valores reais, binrios,
ou casos particulares. Para este ltimo tipo, as funes de gerao da populao, cruza-
mento e mutao, devem ser escritas para o tipo de dados a serem tratados. O nmero de
indivduos sugeridos pela implementao de 15 vezes o nmero de variveis para prob-
lemas multiobjetivos. O nmero de indivduos recomendados varia, porm, para o tipo
de problema, e as restries associadas a tempo e custos de processamento. A criao
da populao pode ser feita de maneira uniforme, caso no haja restries, ou factvel,
respeitando as restries impostas.
Seleo - A implementao utilizada possui somente a opo de utilizao de seleo
por torneio, j visto anteriormente neste captulo, mas permite que outros mtodos sejam
implementados.
Reproduo - O nmero de indivduos gerados a cada gerao especicada como uma
frao do nmero de indivduos da populao. O valor sugerido de 0,80.
58 Captulo 5. Algoritmos Genticos de Otimizao
Mutao - Gaussiana, adiciona um nmero aleatrio vindo de uma distribuio gaussiana
centrada em zero, uniforme, onde as variveis escolhidas baseadas na probabilidade de
mutao so substitudas por um valor aleatrio interno aos limites inferior e superior, ou
adaptativo, onde as direes aleatrias geradas so baseadas no sucesso ou fracasso das
direes de mutao das geraes anteriores.
Cruzamento - Escolha do tipo de troca dos genes, por troca em um ponto ou vrios, ou
mdia ponderada do genoma dos indivduos-pais.
Migrao - Permite que haja a criao de sub-populaes, e que haja troca dos piores
indivduos de uma sub-populao pelos melhores indivduos de outra.
Parmetros de Diversidade - Como mencionado anteriormente, permite a escolha da
distncia de povoamento ou outra mtrica fornecida pelo usurio para a comparao de
indivduos de mesmo nvel de no-dominncia. Tambm permite o ajuste do nmero de
indivduos na frente de Pareto.
Alm destas opes, o uso de mtodos de otimizao hbridos tambm possvel. No
foi, porm, parte do escopo do presente trabalho expandir a metodologia de otimizao nesta
direo.
5.7 Recapitulao
Neste captulo, foi mostrada a heurstica dos algoritmos genticos, em especial a do al-
goritmo multi-objetivo NSGA II. Informaes bsicas a respeito do conceito de optimalidade
de Pareto, e de dominncia de solues foram explicados. Estes conceitos so utilizados na
resoluo de problemas de otimizao multiobjetivo e em particular na anlise dos resultados
obtidos neste trabalho.
Captulo 6
Metodologia Proposta
Neste captulo ser vista a implementao das tcnicas desenvolvidas para a otimizao
de formas aerodinmicas robustas. O processo de otimizao e a anlise dos resultados obtidos
so compostos de diversos passos, cada um com um objetivo especco. Neste captulo, sero
vistos os diversos procedimentos formadores da metodologia deste trabalho.
6.1 Denio do Problema - A Grade de Base
Em geral, a otimizao de grades robustas apresenta-se como um problema de melhora de
ecincia e/ou caractersticas operacionais de uma grade j existente. Isto acontece pelo fato de,
nas fases iniciais de projeto, serem utilizados nos clculos ensaios experimentais de grades, que
atendam aos requisitos de desvio do escoamento com certa margem de segurana, com respeito
ao descolamento ou cavitao e ainda com boa ecincia. Tambm pode ocorrer o re-projeto
de equipamentos j instalados, como parte de um programa de re-potenciao ou manuteno
proativa da turbomquina. Assim, na maioria das vezes, existem informaes pre-existentes
que podem ser utilizadas como ponto de partida.
Para que a grade inicial possa ser escolhida, necessrio conhecer: a velocidade rela-
tiva do escoamento em relao grade na entrada e a velocidade relativa desejada na sada da
grade, no ponto operacional de maior importncia. Para grades mveis, devem ser denidos
os tringulos de velocidade caractersticos do escoamento. O uso dos tringulos de velocidade
como maneira de estabelecer a grade inicial vem da necessidade de se adequar o projeto da
turbomquina aos ensaios de pers aerodinmicos em tneis de vento, ensaios normalmente
relatados como em Emery et al. (1958) e Dunavant e Erwin (1956). Ainda hoje, estudos uti-
lizando tneis de vento reais e computacionais (isto , utilizando tcnicas de CFD) simulam
caractersticas de grades bidimensionais nas fases de pesquisa e anteprojeto, como pode ser
visto em Kumar et al. (2008), por exemplo.
59
60 Captulo 6. Metodologia Proposta
De posse dos tringulos de velocidade, em seguida escolhida uma grade que atenda a
esses requisitos de vazo e desvio. Os parmetros necessrios para a denio da geometria de
uma grade so: as coordenadas que denem a geometria dos pers formadores da grade, o n-
gulo de montagem destes pers e o espaamento entre os pers. Estes parmetros geomtricos
foram introduzidos no Captulo 4 e podem ser vistos na Figura 4.1. A grade escolhida ento
adotada como a grade de base, a partir da qual o processo de otimizao ser iniciado.
No presente trabalho, o processo de otimizao se inicia com o conhecimento da dis-
tribuio de presses no contorno dos aeroflios da grade de base, para um escoamento com os
tringulos de velocidade especicados. A partir desta distribuio de velocidades (ou presses),
so criadas faixas de variao dos valores de presso ou velocidades. Uma populao de dis-
tribuies de velocidades aleatriamente gerada no interior dessas faixas de valores permiti-
dos, e essa populao o ponto de partida para o algoritmo otimizador. No que se segue, ser
vista a maneira como foi gerada a populao para a partida do algoritmo gentico.
6.2 Distribuio de Velocidades sobre a Grade: Ger-
ao da Populao Inicial
O conhecimento da distribuio de presses (velocidades) no contorno da grade de base
o primeiro passo para a obteno da populao inicial. Esta distribuio pode ser obtida de
vrias maneiras:
1. Ensaios experimentais: a distribuio medida no contorno do perl central da grade em
um tnel de vento;
2. Ensaios computacionais: a distribuio calculada por meio de tcnicas de CFD que
simulam o comportamento de um tnel de vento.
Dado o elevado custo de ensaios em tnel de vento, poucos resultados experimentais so
disponveis, devendo ser citados por sua importncia os trabalhos da NACA, e posteriormente
NASA, onde grades de turbomquinas foram sistematicamente testadas e avaliadas. Pode-se
ver na Figura 6.1 um exemplo distribuio de presses no contorno de um elemento de grade
de acelerao do escoamento (turbina), obtida experimentalmente. Nesta gura,
i
o ngulo
de incidncia do escoamento e deexo obtida com a grade (retirado de Dunavant e Erwin
(1956)).
Nesta gura, a abcissa se refere ao comprimento da corda do perl da grade; no presente
trabalho, porm, o comprimento medido em relao ao ponto de estagnao, onde o escoa-
mento se divide para os lados de suco e presso do aeroflio. Neste caso, cada lado possui
um comprimento molhado prprio. Via de regra, o lado de suco do aeroflio possui um
6.2. Distribuio de Velocidades sobre a Grade: Gerao da Populao Inicial 61
Figura 6.1: Distribuio de presso em uma grade de turbina.
comprimento molhado maior que o do lado de presso. Esta diferena conhecida quando o
projeto feito por mtodos diretos, onde os comprimentos so facilmente obtidos. Porm, nos
mtodos inversos o efeito da diferena de comprimento molhado provoca um erro por no ser
conhecida ainda a forma geomtrica do perl. Para pers com pouca curvatura (arqueamento),
e para pequenos ngulos de ataque, este erro da ordem de 2 a 3% de diferena no compri-
mento molhado entre os lados de suco e presso. Para pers com maior arqueamento, como
os utilizados em turbinas a vapor ou gs, este erro chega a 15%, ou mais.
O modo encontrado para minorar o efeito deste erro de geometria o de, uma vez mais,
utilizar-se a grade de base adotada. A princpio, pode-se considerar que a geometria dos pers,
e seu ngulo de montagem, diram pouco entre a grade de base e a grade otimizada. Quo
prximo esta considerao est da realidade uma funo da intensidade da perturbao per-
mitida sobre a distribuio de presso, na etapa de formao da populao, e do processo de
otimizao em si. Pequenas perturbaes, permitidas sobre a distribuio de velocidades, faro
com que a grade dira pouco da grade de base. Porm, como quanticar a faixa de velocidades
qual se permite variar durante a otimizao?
Para aeroflios isolados, este procedimento mais simples, pois fcil aplicar a teoria
dos pers delgados para estimar a espessura mxima e o arqueamento dos pers, utilizando a
distribuio de presses em seu contorno. Para grades de ps, o clculo torna-se um pouco mais
complexo, no havendo frmulas simples para essa estimativa. Porm, foi visto neste trabalho
que, permitindo-se uma faixa de variao menor no lado de presso dos pers, mesmo com
amplas faixas de variao no lado de suco, os aeroflios obtidos possuam uma curvatura,
e comprimentos molhados, prximos aos dos aeroflios da grade de base. Um exemplo pode
ser visto na Figura 6.2, mostrando a variao permitida s curvas de velocidade, tpicas de uma
grade de retardamento, para uma grade de aeroflios NACA 65
1
810, solidez = 1,0, ngulo
62 Captulo 6. Metodologia Proposta
de entrada
1
de 45e incidncia do escoamento de 14.
0
0.25
0.5
0.75
1
1.25
1.5
1.75
2
0 0.25 0.5 0.75 1
V
e
l
o
c
i
d
a
d
e
,
w
/
w
Comprimento molhado
NACA 65
1
-810
Pontos de controle
Limites,lado superior
Limites,lado inferior
Figura 6.2: Faixa de variao de velocidade permitida para o otimizador.
Ainda na Figura 6.2, podem ser vistos os pontos de controle das curvas B-spline que
representam as distribuies de velocidade. O uso das B-splines na representao da geometria
de aeroflios foi visto no Captulo 3, onde foram dados mais detalhes sobre as propriedades
das curvas de Bzier e das B-splines. Da mesma maneira que para a geometria, tambm as
distribuies de velocidade ou presso podem ser representadas por meio de B-splines. Sua
utilizao em procedimentos de otimizao inversa de aeroflios isolados foi feita por Obayashi
e Takanashi (1996), que incluam no trabalho os efeitos transnicos. No presente trabalho, esta
tcnica tambm usada a m de diminuir o nmero de variveis de projeto. Na Figura 6.2,
tanto na representao dos pers de velocidade do lado de presso quanto de suco, foram
utilizados 9 pontos de controle por lado. Destes 9 pontos, o primeiro ponto equivale ao ponto
de estagnao, enquanto o ltimo ponto equivale velocidade no bordo de fuga das ps da
grade. A velocidade na sada da grade foi xada igual velocidade na sada da grade de base.
Isto foi feito, principalmente para evitar problemas indesejveis como o cruzamento no bordo
de fuga da forma geomtrica obtida aps a inverso da distribuio de velocidades. Aos demais
pontos, foi permitida a variao de sua ordenada somente. Apesar do efeito restritivo desta
medida, diminuindo o nmero de curvas possveis, a adio de mais liberdade aos pontos de
controle traz consigo um aumento do esforo computacional. Ou seja, o nmero de parmetros
de projeto dobrado (ainda no caso da Figura 6.2) passando de 10 variveis para 20 relacionadas
distribuio de velocidades.
Para a quanticao da robustez de uma grade, por outro lado, outras perturbaes de-
vem ser adicionadas s curvas de velocidade. Estas perturbaes tm por objetivo simular as
6.2. Distribuio de Velocidades sobre a Grade: Gerao da Populao Inicial 63
correspondentes perturbaes geometria das ps, oriundas de erros de fabricao ou desgaste,
como comentado no Captulo 1. As perturbaes a serem aplicadas distribuio de veloci-
dades se relaciona preciso de fabricao desejada, por sua vez ligada ao custo das ps ou ao
desgaste estimado durante sua vida til. Esta estimativa da preciso de fabricao ou desgaste
no ser feita neste trabalho, visto que este, em seu objetivo principal, visa apenas desenvolver
a metodologia para o procedimento de otimizao robusta. Esta metodologia parte do conheci-
mento das fontes e intensidade dos rudos. Pode-se dizer, porm, que em processos de fundio
por cera perdida, os erros de forma so da ordem de 0,5 a 1% do comprimento considerado e
erros de inclinao da ordem de 0,5, ou seja, para uma p com espessura de 50 mm, o valor
real desta dimenso pode estar comprendido no intervalo de 0,5mm (Fupresa, 2010). Pode
ser visto na Figura 6.3 um exemplo da nuvem de impreciso da forma de um aeroflio para uma
perturbao suave de aproximadamente 0,5% da corda em alguns pontos distribudos sobre a
superfcie de um perl aerodinmico, e de incidncia de 0,5. Este erro aparentemente
pequeno, equivalendo, na gura, apenas a uma maior espessura da linha de contorno do perl.
Figura 6.3: Aeroflio NACA 65
1
412 com perturbaes de forma e incidncia.
Partindo desta ordem de grandeza das perturbaes sobre as formas aerodinmicas, pode-
se construir a nuvem de perturbaes a serem aplicadas sobre as distribuies de velocidade.
Para o aeroflio mostrado na Figura 6.3, a Figura 6.4 traz as distribuies de velocidades cor-
respondentes, para o ngulo de ataque de 2. Nesta gura, as velocidade foram calculadas
utilizando um mtodo de painis, a ttulo de ilustrao. Pode ser visto que a faixa de variao
de velocidades considervel, para as alteraes de forma aplicadas.
As perturbaes de forma podem ser introduzidas de vrios modos. Duffner (2008) aplica
estas perturbaes adicionando ou subtraindo funo de forma do perl as chamadas funes
de Hicks-Henne. J Kumar et al. (2008) realiza toda a parametrizao do perl utilizando
estas funes e aplica as perturbaes variando seus parmetros. As funes de Hicks-Henne
utilizadas por Kumar et al. so do tipo:
b
i
= sen
4
(x
m
i
) , m
i
=
ln2
ln x
p
, i = 1, . . . , n (6.1)
64 Captulo 6. Metodologia Proposta
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
0 0.2 0.4 0.6 0.8 1
V
e
l
o
c
i
d
a
d
e
,
n
o
r
m
.
Comprimento molhado, norm.
Figura 6.4: Distribuio de velocidades em torno do perl NACA 65
1
412 (para = 2).
Na Equao 6.1, x a distncia medida sobre a superfcie normalizada do aeroflio, isto ,
x [0, 1], e x
p
o ponto de mximo da funo.
A forma de realizar a perturbao, tanto na forma dos aeroflios quanto na distribuio
de velocidades, diferente no presente trabalho. A posio dos pontos de controle de curvas B-
spline foi utilizada para alterar a forma das distribuies de velocidade, ou da forma geomtrica
nal (esta foi tambm a maneira utilizada na gerao da Figura 6.3, desta vez utilizando curvas
de Bzier). Na literatura pesquisada no foi encontrada uma tcnica similar a esta, de adminis-
trar o rudo de forma por meio da manipulao dos pontos de controle de B-splines.
Assim, a gerao dos indivduos da populao foi permitida dentro de uma faixa similar
mostrada na Figura 6.2, por meio da gerao aleatria das ordenadas dos pontos de controle
no interior desta faixa. J a perturbao de cada indivduo, a m de vericar sua sensibili-
dade a essas perturbaes, foi feita acrescentando e posteriormente subtraindo um percentual
da largura da faixa (diferena entre os limites superior e inferior) na abcissa do ponto de cont-
role perturbado. Este percentual equivale, grosso modo, espessura
1
da nuvem de distribuio
de velocidade mostrada na Figura 6.4. Como dito anteriormente, no objeto deste trabalho a
quanticao das incertezas de forma e consequentemente de distribuio de velocidade. Es-
tas incertezas dependem dos processos de fabricao, montagem e condies de operao da
turbomquina projetada e devem ser quanticadas antes da utilizao da metodologia aqui de-
1
Kumar et al. (2008) quantica a espessura de perturbao como sendo h = 6, onde o desvio padro
dimensional do processo de fabricao das ps. A utilizao de 6 como a tolerncia de desvio de forma segue a
tendncia atual dos padres de qualidade de fabricao na indstria. Para projetos inversos, o valor de h no
estimado to simplesmente, pois o valor de h deve ser convertido em v, ou seja, oscilao de velocidade.
6.3. Funo Objetivo: Quanticao do Desempenho dos Indivduos 65
senvolvida.
6.3 Funo Objetivo: Quanticao do Desempenho
dos Indivduos
Como visto no Captulo 5, o algoritmo de otimizao gentica multiobjetivo (MOGA) re-
quer que os indivduos sejamclassicados conforme seu desempenho e nvel de no-dominncia.
Neste trabalho, a ecincia da grade foi tomada como o primeiro objetivo a ser minimizado. No
Captulo 4, foi mostrada uma das maneira de se denir a ecincia de grades de turbomquinas,
baseada na energia perdida pelo escoamento. Uma das vantagens da denio adotada a de
que os parmetros necessrios para seu clculo podem ser calculados sem a necessidade do
conhecimento da forma geomtrica dos pers aerodinmicos. Da denio da ecincia foi
obtida a grandeza a ser minimizada tanto para grades de acelerao quanto de retardamento do
escoamento:
Max[
T,B
] Min
_
y
_
(4.65)
O segundo objetivo, que tenta reetir a robustez da grade, foi adotado como sendo a
minimizao da varincia das perdas da mquina. Da Equao 2.17, obtm-se a varincia de
v
/
y
:
Min
_
Var
_
y
__
= Min
_
1
n
p
i=1
__
y
_
y
_
i
_
2
_
(6.2)
onde
_
y
_
a mdia dos valores obtidos das n distribuies de velocidade, sem perturbaes e
perturbadas
_
y
_
i
. Os valores de
y
e
v
so, por sua vez, obtidos das Equaes 4.25, e 4.57. A
quanticao destes valores depende, porm, de outras incgnitas. Estas so: as espessuras de
quantidade de movimento e de deslocamento da camada-limite ao redor do corpo e os ngulos
a montante e a jusante da grade. O procedimento de obteno destes ngulos visto no que
segue.
6.3.1 ngulos do Escoamento
Os ngulos so obtidos das condies na entrada da grade e da distribuio de veloci-
dades em torno dos pers. A velocidade na entrada da grade conhecida, bem como sua
direo. Portanto, o ngulo
1
dado. A partir da distribuio de velocidades em torno do
aeroflio, obtm-se
u
. Como dito anteriormente, deve-se considerar o comprimento molhado
66 Captulo 6. Metodologia Proposta
de cada lado do aeroflio, partindo do ponto de estagnao, para a integrao da distribuio de
velocidades dada pela Equao 4.18.
O ngulo
obtido trabalhando-se algebricamente as relaes dos tringulos de veloci-
dade das grades. Das denies de
e
y
, vem que:
_
_
_
tg
1
tg
2
=
y
tg
1
+ tg
2
= 2 tg
tg
1
= tg
+
y
2
(6.3)
Substituindo a Equao 4.25 na Equao 6.3, obtm-se:
tg
1
= tg
+
u
2 cos
(6.4)
Isolando os termos sen
e cos
, elevando ao quadrado e utilizando a relao sen
2
+
cos
2
= 1, chega-se a:
1 sen
2
=
_
sen
+
u
2
tg
1
_
2
(6.5)
Resolvendo-se esta equao do segundo grau, tem-se:
= arc sen
_
(
u
) +
_
(
u
)
2
(1 + tg
2
1
)(
2
2
u
4 tg
2
1
)
2(1 + tg
2
1
)
_
(6.6)
O ngulo
2
encontrado substituindo-se o resultado da Equao 6.6 em uma das equaes do
sistema 6.3. Resta a relao entre
2
e
2id
. Esta relao dada pela Equao 4.49:
tg
2
tg
2id
=
1
(1
)
2
= (4.49)
Para resolv-la, necessrio conhecer o desenvolvimento da camada-limite ao longo da super-
fcie dos pers. O mtodo de clculo da camada-limite ser visto na seo seguinte.
6.3.2 Clculo da Camada-lLimite
A camada-limite ao redor dos pers da grade calculada utilizando um mtodo de clculo
integral, retirado de Moran (1984). O clculo efetuado utilizando o mtodo de Thwaits para
o clculo da poro laminar da camada-limite e o mtodo de Head para o clculo do trecho
turbulento. O clculo da posio da transio laminar-turbulenta feito utilizando o critrio
de Michel. Uma alterao foi efetuada, porm. Na subrotina de clculo em Moran (1984), o
clculo encerrado ao se atingir o critrio de descolamento, o do valor limite para o fator de
forma do perl de velocidades da camada-limite, denotado na literatura por H, onde H =
/.
6.3. Funo Objetivo: Quanticao do Desempenho dos Indivduos 67
No presente clculo, porm, foi feita uma correo a m de se obter os valores aproximados da
espessura de quantidade de movimento e de deslocamento no bordo de fuga dos pers.
Esta alterao foi proposta por Speidel e Scholz, e utilizada por Schlichting (citado acima),
por Sanger (1973), e mais recentemente por Ramirez Camacho e Manzanares Filho (2005).
Speidel, partindo de bases tericas e experimentais, props que a espessura de quantidade de
movimento devida ao descolamento seja calculado da seguinte forma:
Sep
=
1
2
y
tSep
_
_
w
Sep
w
2
_
2
_
w
TE
w
2
_
2
_
(6.7)
onde
Sep
a parcela da espessura de quantidade de movimento na sada da grade devido ao
descolamento, y
tSep
a espessura da p no ponto de descolamento, w
Sep
a velocidade da
corrente livre em torno do aeroflio, no ponto de descolamento, w
2
a velocidade mdia no
plano de sada da grade e w
TE
a velocidade do escoamento imediatamente na sada da grade.
Speidel obteve experimentalmente o valor de 0, 9 para o quadrado da razo entre as velocidades
sada (Sanger, 1973), e a Equao 6.7 torna-se ento:
Sep
=
1
2
y
tSep
_
_
w
Sep
w
2
_
2
0, 9
_
(6.8)
O valor de
Sep
obtido com a Equao 6.8 adicionado Equao 4.40, resultando na
espessura de quantidade de movimento normalizada na sada da grade com descolamento:
=
s
+
p
+
Sep
s cos
2id
(6.9)
onde os ndices s e p denotam os lados de suco e presso do perl, respectivamente.
No foi indicado na literatura consultada, porm o clculo da espessura de deslocamento
deve tambm ser corrigido de modo a reetir o descolamento. Como considerao bsica
da correo, pode-se admitir que a relao entre a espessura de quantidade de movimento e de
deslocamento permanece vlida. Assim:
Sep
= H
lim
Sep
(6.10)
s
+ t
te
+
p
+
Sep
s cos
2id
(6.11)
onde H
lim
o fator de forma do perl de velocidades no interior da camada-limite no ponto
de descolamento. Para o valor de H
lim
, Schlichting (1959) recomenda o valor de 2,0 como o
limite do fator de forma, acima do qual j se considera o escoamento como descolado. J Moran
(citado acima), recomenda um valor de H
lim
=2,4 como limite. Apesar da grande diferena
entre os valores sugeridos, na proximidade do descolamento o valor de H
lim
cresce demasiada-
68 Captulo 6. Metodologia Proposta
mente rpido e a diferena do ponto de descolamento para um ou outro valor pequena. Sanger
(1973) argumenta porm a favor do valor 2,0, com evidncias experimentais da proximidade
deste valor de H no ponto de separao. Adotou-se por isso este valor no clculo.
6.3.3 Teste do Procedimento de Clculo
O modelo para clculo do desempenho e caractersticas aerodinmicas de grades foi com-
parado aos resultados experimentais apresentados por Emery et al. (1958) para grades de com-
pressores e por Dunavant e Erwin (1956) para grades de turbinas. A grade de compressor
escolhida para o clculo possui as seguintes caractersticas: aeroflio NACA 65
1
810, solidez
=1,0, ngulo
1
=45, nmero de Reynolds Re =245.000. Os valores de C
L
e C
D
foram
normalizados em funo da velocidade de entrada w
1
. Os resultados do teste para a grade po-
dem ser vistos na Figura 6.5, onde a deexo da grade dada por =
1
2
, e o ngulo
de incidncia do escoamento sobre a grade
1
. Nesta gura, os resultados calculados foram
comparados aos resultados experimentais extrados de Emery et al. (1958).
Neste clculo, foi utilizada a distribuio de velocidades no contorno de um perl da
grade, obtido por meio de um mtodo de singularidades com a correo de Gostelow nas prox-
imidades do bordo de fuga (Manzanares Filho, 1994). O comprimento molhado a partir do
ponto de estagnao foi calculado e em seguida normalizado para o extradorso e intradorso do
perl. Calculou-se ento a circulao efetiva
u
e as espessuras de quantidade de movimento
e deslocamento da camada-limite ( e ). Os ngulos
i
foram calculados partindo-se da
distribuio de velocidade apenas, ou seja, como se a geometria fosse desconhecida.
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
4 8 12 16 20 24
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
0.1
C
L
C
D
, graus
a)
C
D
Exp.
C
D
Calc.
C
L
Exp.
C
L
Calc.
0
5
10
15
20
25
4 8 12 16 20 24
0
10
20
30
40
50
60
70
80
90
100
,
g
r
a
u
s
C
L
/
C
D
, graus
b)
L/D Exp.
L/D Calc.
Exp.
Calc.
Figura 6.5: Procedimento de clculo aplicado em uma grade geradora.
6.3. Funo Objetivo: Quanticao do Desempenho dos Indivduos 69
Observa-se uma boa correlao entre os resultados do coeciente de arrasto, bem como
do ngulo de deexo do escoamento. Mesmo com os resultados obtidos diferindo um pouco
mais dos experimentais para ngulos de incidncia superiores a 18, eles mostram claramente o
efeito do descolamento no desempenho da grade e sua relao com a incidncia do escoamento.
O mais importante, neste caso, uma boa caracterizao do descolamento, similar posio
do descolamento nos resultados experimentais.Pelo fato da otimizao neste trabalho ser um
procedimento comparativo por natureza, e de se utilizar a mesma metodologia de clculo das
perdas tanto para a grade de base quanto as grades otimizadas, um melhor desempenho relativo,
apontado entre as grades de base e otimizadas pode ser considerado como vlido, apesar do
procedimento computacional para o clculo da camada -limite ser bastante simples.
Para o teste de clculo emgrades de turbinas foi escolhida uma grade de aeroflios chama-
dos pers primrios, com ngulo de arqueamento
c
=65, espessura mxima de 0,1c, solidez
= 1,5, Reynolds de 3,510
5
, ngulo
1
=0. Os valores calculados apresentam uma boa
aproximao aos resultados experimentais de Dunavant e Erwin (1956), como pode ser visto na
Figura 6.6.
20
40
60
80
100
120
140
24 28 32 36 40 44 48 52 56
0
0.02
0.04
0.06
0.08
0.1
0.12
L
/
D
C
D
.
, graus
a)
C
D
Exp.
C
D
Calc.
L/D Exp.
L/D Calc.
40
50
60
70
24 28 32 36 40 44 48 52 56
,
g
r
a
u
s
, graus
b)
Exp.
Calc.
Figura 6.6: Procedimento aplicado em uma grade motora.
Uma vez mais, pode-se notar que, apesar da simplicidade do clculo integral da camada-
limite, os resultados para os ngulos de incidncia anteriores ao incio do descolamento pro-
nunciado so muito prximos aos resultados dos ensaios em tnel de vento.
70 Captulo 6. Metodologia Proposta
6.4 Penalizao dos Objetivos
Cada um dos indivduos da populao, durante o processo de otimizao, deve ser avali-
ado para sua classicao. Porm, s a avaliao dos objetivos no suciente para qualicar
um indivduo em detrimento de outro. As restries so muito importantes e devem necessari-
amente ser levadas em conta.Ao avaliar as grades quanto perda de energia e sua varincia
deve-se vericar, por exemplo, se a deexo do escoamento se encontra dentro da faixa de
tolerncia; se o descolamento excessivo; ou se a curva de distribuio de velocidades deste
indivduo da populao possui um nmero muito grande de inexes (a curva possui muitas
oscilaes). Em outro exemplo, no caso de grades para turbinas hidrulicas, pode-se penalizar
as grades em que o valor mnimo de presso do lado de suco seja inferior (ou superior) ao
valor de segurana contra a cavitao.
Uma das maneiras de efetuar a penalizao a de adicionar um valor, a um dos objetivos
proporcional ao desvio em relao aos limites da varivel de interesse. Por exemplo, uma de-
exo insuciente ou excessiva acima de uma certa tolerncia pode ser penalizada adicionando
o desvio quadrtico (ou em valor absoluto) ao parmetro de desempenho, multiplicado por um
fator de penalizao Fp. Neste trabalho, Fp foi utilizado com valores entre 10 a 1000.
Para os indivduos cujo desempenho esteja muito abaixo do aceitvel, o fator de penaliza-
o foi aplicado a ambos os objetivos, a m de elimin-los da prxima gerao da populao.
O efeito disto o de colocar o indivduo, na classicao por nveis de no-dominncia, em
um nvel superior, diminuindo, ou eliminando as chances desse indivduo sobreviver prxima
gerao.
6.5 O Problema Inverso da Grade
O problema inverso da grade, ou seja, de obteno das caractersticas geomtricas para
produzir a distribuio de velocidades requeridas, um problema desacoplado da parte de
otimizao inversa. Aps a obteno da frente de Pareto, contendo as solues no-dominadas,
uma das solues deve ser escolhida dentre as apresentadas. Esta escolha feita segundo
critrios que no foram programados na funo objetivo. Aps escolhida a distribuio de
velocidades e solidez da grade , necessrio que se obtenha a geometria do aeroflio e o n-
gulo de montagem (Figura 4.1, pgina 30), a m de ter todos os parmetros construtivos da
grade.
A inverso da grade, por si, tambm pode ser considerada um problema de otimizao,
ou seja, dada uma distribuio de velocidades no contorno de uma forma desconhecida, deve-
se obter os parmetros geomtricos que causam o menor erro entre a distribuio desejada, e
a capaz de ser obtida na realidade. Um procedimento de rpida convergncia (em nmero de
6.6. Fluxograma da Metodologia de Clculo 71
iteraes necessrias) pode ser encontrado no trabalho de Petrucci e Manzanares Filho (2007).
Em outro trabalho, Manzanares Filho et al. (2005) utilizam um algoritmo populacional de busca
aleatria controlada, o CRS
2
para a inverso de distribuies de presso em formas geomtricas.
Este segundo algoritmo foi o utilizado neste trabalho para a obteno dos parmetros geomtri-
cos das grades, utilizando como resolvente do escoamento um mtodo de painis para grades,
com a correo de Gostelow sobre o escoamento nas proximidades do bordo de fuga das ps.
Detalhes sobre o resolvente, e sobre a correo de Gostelow, podem ser encontrados nos tra-
balhos de Gostelow (1984), Manzanares Filho (1994), Amorim (1987), Ramirez Camacho e
Manzanares Filho (2005), e Moino (2006).
Verica-se que o meio de obteno da geometria totalmente desacoplado da primeira
parte, de otimizao multiobjetivo. Portanto, outros algoritmos de maior delidade, como
os mtodos de soluo das equaes completas de Navier-Stokes, com diferentes modelos de
parede, e de simulao dos fenmenos de turbulncia, podem ser aqui utilizados. Isto em nada
invalida o presente trabalho, visto que as comparaes feitas entre os diversos aeroflios e
grades obtidas a partir da otimizao multiobjetivo inicial, foram efetuadas entre aeroflios e
grades obtidas com o mesmo algoritmo de inverso, e mais importante, o mesmo resolvente.
Os efeitos viscosos foram includos por meio do mesmo mtodo de clculo da camada-limite
utilizada na avaliao das distribuies de velocidade das grades e aeroflios durante o passo de
otimizao multiobjetivo inicial. Para utilizao com ns comparativos, ou seja, para avaliao
de uma grade em relao a outra, o presente mtodo mostrou-se aceitvel e com boa resposta
comparados aos resultados experimentais. Porm, uma palavra de precauo vale aqui, em que
se recomenda o uso de modelos de maior delidade de resposta quando da utilizao na prtica
da presente metodologia, para a obteno das grades e aeroflios desejadas da Frente de Pareto.
6.6 Fluxograma da Metodologia de Clculo
Os procedimentos elementares para a otimizao robusta por meio de mtodos inversos
foram delineados nas sees anteriores, neste captulo, e nos captulos anteriores. Deste con-
junto de procedimentos, proposta neste trabalho uma linha de clculo para o processo de
otimizao de grades e aeroflios robustos por meio de mtodos inversos. O uxograma do
procedimento pode ser visto nas Figuras 6.7 e 6.8. Cada passo ser, a seguir, expandido em
detalhes.
1. Leitura das caractersticas da grade: Os dados de entrada, ou seja, os ngulos de en-
trada e sada da grade
1
e
2
, o nmero de Reynolds em relao velocidade mdia w
,
as abcissas dos pontos de controle para distribuio de velocidades, no intervalo entre
[0, 1], os limites superior e inferior das ordenadas dos pontos de controle nestas abcissas,
2
Sigla para Controlled Random Search.
72 Captulo 6. Metodologia Proposta
os limites de solidez da grade e a intensidade de perturbao a ser aplicada s ordenadas
dos pontos de controle para o clculo da robustez. Como dito anteriormente, pode-se
tambm considerar as abcissas como parmetros de projeto, mas isto praticamente dobra
o nmero de variveis a serem tratadas pelo otimizador gentico. Pode-se otimizar apenas
uma das distribuies de velocidade, mantendo-se a outra xa (a mais crtica a do lado
de suco do aeroflio, sendo somente esta otimizada em um dos exemplos do prximo
captulo).
2. Gerao da populao inicial: Dados os limites inferior e superior para as ordenadas dos
pontos de controle das curvas de velocidade, e os limites inferior e superior da solidez,
uma populao de k indivduos criada neste espao de solues, cada um com valores
aleatoriamente gerados para as ordenadas dos pontos de controle e a solidez de grade.
O nmero de indivduos , via de regra, no mnimo 10 vezes o nmero de variveis.
Durante a gerao da populao, ocorre a classicao dos indivduos gerados segundo
sua dominncia. Aps a gerao, a populao inserida no otimizador.
3. Algoritmo Gentico: No interior do algoritmo gentico, a populao modicada pelos
operadores de cruzamento, mutao e seleo. Os passos so similares aos mostrados na
Figura 5.1:
(a) Aplicao dos operadores de cruzamento e mutao: O gentipo dos indivduos,
selecionados pelo mtodo de torneio, so combinados de maneira ponderada, por
meio de um coeciente aleatrio r, (0 r 1), produzindo um gentipo do tipo
G
r
= (1 r) G
1
+ r G
2
. Neste trabalho, foi especicado que 80% da popu-
lao fosse renovada a cada gerao. Para a aplicao do operador de mutao, foi
utilizado o operador adaptativo, que gera direes aleatrias a serem adicionadas ao
vetor de genoma, porm baseadas na ltima gerao (da o nome adaptativo), seja
ela de sucesso ou no. Estes vetores de mutao respeitam os limites do espao de
solues, e outras restries de desigualdade.
(b) Clculo dos objetivos: Neste ponto, a matriz contendo o fentipo de todos os indi-
vduos recm-gerados inserida no algoritmo de clculo dos valores de adaptao
desses indivduos.
(c) Aplicao do operador de seleo: A seleo feita segundo o critrio de dom-
inncia de um indivduo em detrimento de outros e a distncia de povoamento, como
explicado na Seo 5.5.
(d) Critrio de parada: Por nmero mximo de geraes (>200) ou estagnao da
evoluo (stall) por um determinado nmero de geraes (>50), quando a mdia
ponderada da variao do valor dos objetivos for menor que a tolerncia especicada
(<10
4
) por este nmero de geraes.
6.6. Fluxograma da Metodologia de Clculo 73
4. Inverso e Avaliao das Grades Escolhidas: As grades escolhidas na Frente de Pareto,
resultantes do processo de otimizao, so avaliadas aps sua inverso pelo mtodo men-
cionado na Seo 6.5.
O clculo do desempenho e da robustez de cada indivduo feito por meio da funo de
adaptao ou funo objetivo. O uxograma das duas funes visto na Figura 6.8.
Este clculo dividido em duas partes: clculo do desempenho da funo no-perturbada,
ou seja, do primeiro objetivo, e o clculo da varincia do desempenho sob o efeito das pertur-
baes. O uxograma de clculo detalhado segue:
1. Leitura da matriz de Ngenomas: Os N indivduos recm gerados tm suas p variveis
de projeto montadas em uma matriz N p, que lida pela rotina de clculo. Cada um
dos N indivduos tero seus objetivos calculados. As variveis de projeto, ou fentipo,
dos indivduos, so as ordenadas dos pontos de controle das curvas de distribuio de
velocidade, dos lados superior e inferior dos aeroflios e a razo de solidez. Aps o incio
do lao de clculo para os N indivduos, a subrotina passa a ter duas partes diferentes,
cada uma para o clculo de um dos objetivos. Estas partes, porm, utilizam a mesma
rotina de clculo para o clculo do desempenho. Este clculo, por ser comum a ambos
objetivos, ser delineado aqui.
(a) Discretizao das B-splines: Neste ponto, o fentipo de um indivduo transfor-
mado de pontos de controle para a curva de distribuio de velocidades do ponto
de estagnao at o bordo de fuga, para ambos os lados do aeroflios. Estas curvas
[s, V] para os lados de suco e presso so a entrada para o clculo da camada-
limite.
(b) Calcula a camada-limite: As espessuras de quantidade de movimento e de desloca-
mento para cada lado do aeroflio so calculadas, bem como a estimativa do ponto
de descolamento.
(c) Clculo do desempenho: O desempenho calculado utilizando a Equao 4.65,
para grades de turbina ou bomba. Partindo dos valores calculados para a camada-
limite, o desvio capaz de ser provocado pela grade estimado, obtendo-se
y
, e o
coeciente de perda vem da Equao 4.57.
2. Primeiro objetivo - Desempenho: Nesta fase so feitos os clculos do desempenho
do indivduo no-perturbado e das penalizaes por desvio dos limites especicados (de
desempenho, estimativa dimensional ou outros).
(a) Clculo do desempenho: visto no item acima.
(b) Penalizao: Contra perdas excessivas ou coeciente de arrasto muito elevado (para
asas isoladas), desvio insuciente ou excessivo, espessura estimada fora das especi-
caes, entre outros possveis.
74 Captulo 6. Metodologia Proposta
Figura 6.7: Fluxograma do procedimento de otimizao.
3. Segundo objetivo - Varincia do Desempenho: calculado o desempenho para k indi-
vduos cujas curvas de velocidade so perturbadas.
6.6. Fluxograma da Metodologia de Clculo 75
Figura 6.8: Fluxograma do procedimento de clculo dos objetivos.
(a) Aplicao da perturbao: A cada uma das ordenadas dos pontos de controle
adicionado , gerando assim 2 novos indivduos; lembrar que o primeiro e ltimo
pontos para cada curva so xos, portanto o nmero de sub-indivduos gerados de
k = 2(n
s
+ n
i
4), onde n
s
o nmero de pontos de controle do lado superior do
aeroflio, e n
i
o nmero do lado inferior.
(b) Calcula o desempenho: Amesma rotina de clculo do primeiro objetivo utilizada,
desta vez para os k sub-indivduos.
(c) Calcula a varincia do desempenho: Os k + 1 valores de desempenho so uti-
lizados (incluindo o desempenho do indivduo no perturbado), sendo calculado o
desempenho mdio, e partindo dele, a varincia por meio da Equao 6.2, onde
76 Captulo 6. Metodologia Proposta
n = k + 1.
4. Montagem da matriz de sada: aps o clculo dos dois objetivos, montada a matriz
N 2 contendo os dois objetivos para os N indivduos, na mesma ordem em que foram
lidos no incio da rotina de clculo.
6.7 Implementao Computacional
Os uxogramas anteriores foram implementados em duas linguagens de programao de
computadores: Matlab
verso R2008a, e FORTRAN. A implementao em FORTRAN foi
utilizada exclusivamente no desenvolvimento da funo de clculo dos dois objetivos, com o
objetivo de acelerar a velocidade de processamento e utilizar rotinas ecientes e j testadas (cl-
culo da camada-limite e clculo das B-splines). O acoplamento destas funes em FORTRAN
s rotinas de otimizao gentica internas ao pacote Matlab foi feita utilizando um procedi-
mento de ligao dinmica de bibliotecas
3
s rotinas em FORTRAN, denomidado mexagem
4
,
e indica o procedimento de compilao para a gerao de um arquivo executvel dentro do am-
biente de trabalho do Matlab. O detalhamento deste procedimento foge ao escopo do presente
trabalho, e no ser aqui efetuado.
6.8 Recapitulao
Neste captulo foi feita a ligao entre toda a parte terica desenvolvida nos captulos an-
teriores, a m de utiliz-la na resoluo do problema proposto. A metodologia ora desenvolvida
para otimizao inversa de grades robustas foi explicada em mais profundidade, e sua imple-
mentao delineada por meio de uxogramas do processo de clculo. No captulo seguinte,
sero vistos exemplos de utilizao e a comparao de alguns resultados obtidos, por meio da
inverso de algumas grades (e aeroflios isolados) selecionados.
3
Do ingls DLL: Dynamic Library Linking.
4
O termo MEX signica Matlab Executable
Captulo 7
Exemplos de Aplicao da
Metodologia
Neste captulo sero vistos exemplos de utilizao da metodologia desenvolvida neste
trabalho. Nestes exemplos, os aeroflios e grades lineares resultantes so otimizados e seus
resultados, j invertidos, so comparados entre si, a m de vericar se a robustez relativa
mantida aps o processo de inverso.
7.1 Aeroflio Isolado - NACA 65
1
412
O primeiro exemplo a ser apresentado o do aeroflio NACA 65
1
412, um aeroflio lam-
inar. Seu principal atrativo o baixo arrasto, quando o escoamento possui uma parcela signif-
icante da camada-limite em regime laminar. Este , porm, tambm um de seus pontos fracos,
pois a parcela laminar torna-se instvel a partir de um determinado ngulo de ataque, e o ponto
de transio laminar-turbulento muda subitamente para montante do perl, com um rpido au-
mento do arrasto deste perl. Esse salto instantneo do arrasto bastante indesejvel no projeto
de aeronaves e ps de turbomquinas. Como perl para estudo, porm, torna-se interessante
para vericaes de modelos, pela existncia de dados experimentais publicados para compara-
o (ver Abbott e von Doenhoff (1959).
Para aeroflios isolados, o coeciente de arrasto pode ser calculado pela frmula de
Squire-Young (Obayashi e Takanashi, 1996):
C
D
= 2
te
_
w
te
w
_
3,2
(7.1)
onde
te
a espessura de quantidade de movimento da camada-limite, w
te
a velocidade do
77
78 Captulo 7. Exemplos de Aplicao da Metodologia
escoamento no bordo de fuga do aeroflio e w
a velocidade da corrente livre.
Neste exemplo, foi utilizado um nmero de Reynolds igual a 610
6
, para um escoamento
incompressvel. Pode-se ver na Figura 7.1 o comportamento do modelo comparado aos resul-
tados experimentais deste perl. notvel que, no escoamento de caracterstica fortemente
laminar, o modelo mais pessimista que os resultados experimentais, enquanto que, na parcela
de escoamento mais turbulenta (aps o chamado bucket, caracterstico dos pers laminares),
o modelo subestima os valores reais. Isto, porm, no invalida o mtodo de clculo para os
objetivos do processo de otimizao, visto que a caracterstica que se deseja capturar neste caso
a robustez nesta posio de transio entre laminar-turbulento. Este um ponto delicado,
notando que existe grande dependncia do modelo de transio utilizado. Pelo fato do critrio
de transio de Michel ser "calibrado"por meio de dados experimentais, resulta uma boa carac-
terizao da transio nas proximidades dos resultados experimentais obtidos de Abbott e von
Doenhoff (1959), como pode ser visto ainda para a curva polar C
L
C
D
mostrada na Figura
7.1.
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
1.1
1.2
0 0.002 0.004 0.006 0.008 0.01 0.012
C
o
e
f
i
c
i
e
n
t
e
d
e
S
u
s
t
e
n
t
a
c,
a -
o
,
C
L
Coeficiente de Arrasto, C
D
Experimental
Calculado
Figura 7.1: Comparao entre os resultados do modelo e dados experimentais.
Nota-se que, para o valor de Reynolds adotado, esta transio abrupta se d com valores
de C
L
0,54, o que equivale a um ngulo de ataque prximo a 1,75
. Este ser o valor de
ngulo de ataque adotado para a otimizao, no ponto em que o aeroflio de base menos
estvel.
7.1. Aeroflio Isolado - NACA 65
1
412 79
7.1.1 Denio do Problema
Prope-se a procura do aeroflio de menor arrasto, e mais robusto s perturbaes em seu
formato. O aeroflio de base possui espessura de 12% e para Re =610
6
, no ngulo de ataque
de 1,75, o valor do coeciente de sustentao de C
L
= 0,54 e o coeciente de arrasto C
D
=
0,0049, segundo o modelo utilizado. Para o problema considerado, foi permitido s curvas de
velocidade uma grande faixa de variao, como mostrado na Figura 7.2. Porm, otimizou-se
apenas a distribuio de velocidades do lado de suco do perl, mantendo-se xa a do lado de
presso.
0
0.25
0.5
0.75
1
1.25
1.5
0 0.25 0.5 0.75 1
V
e
l
o
c
i
d
a
d
e
,
w
/
w
,
a
d
i
m
.
Comprimento molhado, p.u.
NACA 65
1
-412, =1.75
o
Pontos de controle
Figura 7.2: Velocidades em torno do perl de base, e faixas permitidas ao otimizador.
O primeiro objetivo a minimizao de C
D
, sujeito s seguintes restries:
1. Limites inferior e superior para a distribuio de velocidades no lado de suco so xos;
2. Distribuio de velocidades do lado de presso especicada;
3. Coeciente de sustentao C
L
especicado (C
L
= 0,54). Penalizado caso seja inferior a
-5% do valor especicado;
4. Espessura do aeroflio t especicada (t = 0,12c). Penalizao caso ultrapasse 5% do
valor especicado. A estimativa do valor da espessura foi obtido de Obayashi e Takanashi
(1996):
t =
_
1 M
2
2
_
1
0
C
p,s
+ C
p,p
2
dx
Para o caso incompressvel, M
=0.
80 Captulo 7. Exemplos de Aplicao da Metodologia
5. Nmero de inexes da curva de distribuio de velocidades deve ser menor ou igual a
um valor especicado (inteiro positivo). Neste problema, foi usado um valor mximo de
2 para o nmero de inexes permitidas e o objetivo penalizado caso ultrapasse este
nmero ;
6. A taxa de variao do coeciente de presso menor que um valor expecicado, de modo
a eliminar mudanas muito abruptas (neste caso,
dC
p
dx
2, 5). Tambm penalizado caso
ultrapasse este valor.
O fator de penalizao utilizado foi de Fp =10, da forma mostrada na Seo 6.4.
O segundo objetivo o da minimizao da varincia do arrasto, sujeito perturbao das
distribuies de velocidade. A expresso usada foi:
2
=
p
i=1
(C
D,i
C
D
)
2
(7.2)
importante notar que, pela expresso acima, o valor de
2
uma expresso da vulnerabilidade
do aeroflio, ou seja, quanto maior a varincia, menor a sua robustez. Assim, o problema se
torna o de uma minimizao de ambos objetivos, o arrasto e a vulnerabilidade dos pers.
Neste exemplo, apenas o lado de suco sofreu perturbaes, dadas como um percentual
da faixa permitida aos pontos de controle da curva de velocidade do aeroflio. A perturbao
utilizada foi de 10% do valor da faixa, aplicadas s ordenadas dos pontos de controle. Como
dito anteriormente, no h perturbaes nas posies [0; 1], visto se ter considerado o ponto
de estagnao com velocidade zero, e ter sido mantida xa a velocidade no bordo de fuga.
Para estas abcissas, nas faixas (vistas na Figura 7.2) nota-se a pequena variao permitida ao
primeiro ponto, bem como sua proximidade origem, dada por sua abcissa. Isto se deve ao
fato de, para se obter um bom raio de curvatura no bordo de ataque, desejvel a existncia de
elevados gradientes de velocidade aps o pontos de estagnao (Obayashi e Takanashi, 1996).
A colocao de um ponto bastante prximo do eixo das ordenadas, mas no sobre este, evita
um problema numrico de diviso por zero causado pelo algoritmo de derivao das B-splines,
sem causar problemas ao clculo da camada-limite. Os limites superior e inferior para variao
das distribuies de velocidade, utilizados na gerao da populao inicial, podem ser vistos na
Tabela 7.1.
7.1.2 Otimizao do Aeroflio Isolado
Para o algoritmo NSGA II utilizado, uma populao de 15 vezes o nmero de variveis
(10) foi utilizada, ou seja, 150 indivduos, com 80% de renovao a cada gerao. Aps 102
geraes, o algoritmo foi terminado pela alterao na medida de espalhamento da populao na
7.1. Aeroflio Isolado - NACA 65
1
412 81
Tabela 7.1: Faixas de variao dos pers de velocidade, aeroflio isolado.
Abcissas Ordenadas dos Limite Limite Faixa de
dos Pontos Pontos Controle Superior Inferior Variao
de Controle (Suco)
0,001 0,475 0,48 0,47 0,01
0,010 1,26 1,5 1,0 0,5
0,025 1,28 1,5 1,1 0,4
0,050 1,30 1,5 1,1 0,4
0,10 1,27 1,5 1,1 0,4
0,20 1,27 1,5 1,1 0,4
0,40 1,32 1,5 1,1 0,4
0,60 1,24 1,4 1,1 0,3
0,80 1,10 1,2 1,0 0,2
0,97 1,0 1,1 1,0 0,1
frente de Pareto ser menor que o valor de tolerncia, xado em 10
6
. Os resultados podem ser
vistos na Figura 7.3. Nesta gura, o arrasto dado emfuno da vulnerabilidade dos indivduos,
ou seja, o inverso da robustez.
0
0.005
0.01
0.015
0.02
0.025
0.03
0.75 1 1.25 1.5 1.75 2 2.25 2.5
C
D
,
p
e
n
a
l
i
z
a
d
o
1/Robustez x 10
-3
, adim.
Robustez vs. Coeficiente de Arrasto
Aerofo lio A1
" B1
" C1
" D1
" A2
" B2
Figura 7.3: Frente de Pareto para a otimizao de um aeroflio isolado.
Os resultados destacados a serem analizados so os aeroflios de mais baixo arrasto, A1,
B1, C1, D1. Os aeroflios A2 e B2 possuem pequenos desvios das especicaes (espessura),
tendo sido por isto penalizados. Para os aeroflios 1, nota-se no grco uma larga faixa de
82 Captulo 7. Exemplos de Aplicao da Metodologia
variao da vulnerabilidade (inverso da robustez), sendo a varincia do aeroflio mais robusto
(D1) aproximadamente a metade do aeroflio mais eciente (A1). As caractersticas podem
ser vistas na Tabela 7.2, construda a partir dos aeroflios j invertidos, ou seja, aps sua forma
geomtrica ter sido encontrada. A forma dos aeroflios para a famlia 1 pode ser vista na Figura
7.4. Na Figura 7.4, no possvel observar com nitidez as diferenas de formato entre os pers
Tabela 7.2: Aeroflio de Base, e aeroflios otimizados.
Aeroflio Espessura Incidncia C
L
C
D
Varincia
(% da corda) (graus)
65
1
412 12,0 1,75 0,54 0,0049 -
A1 12,6 1,76 0,56 0,0055 2,4110
4
B1 12,1 1,76 0,54 0,0058 1,8110
4
C1 12,1 1,76 0,54 0,0059 1,3510
4
D1 12,7 1,76 0,54 0,0061 1,2810
4
A2 13,3 1,74 0,55 0,0051 1,2410
4
B2 11,4 1,76 0,54 0,0060 1,0310
4
aerodinmicos. Por sua vez, nas curvas de velocidade pode-se notar a alterao de formato,
de topo plano no aeroflio A1, ao incio da formao de um pico no D1. A ttulo ilustrativo,
a comparao da forma geomtrica para A1 e C1 mostrada na Figura 7.5, por meio de um
aumento de escala das ordenadas dos pers. vista a mudana do ponto de espessura mxima
para uma posio mais prxima do bordo de ataque do aeroflio A1 para C1.
Seguindo-se inverso, o formato dos aeroflios foi sujeito s perturbaes para veri-
cao quanto sua robustez. Esta perturbao foi de 2% da corda aplicada ordenada dos
pontos de controle das curvas de Bzier da geometria, para observar o que se convencionou a
chamar de robustez geomtrica (referindo-se geometria do aeroflio). J a m de vericar o
efeito de uma perturbao no ngulo de ataque, o valor nominal deste foi perturbado de 0,5
,
e foi tomada a varincia com apenas 3 pontos. A esta ltima vericao, chamou-se de robustez
angular. Os resultados podem ser vistos nas Figuras 7.6 e 7.7. notvel observar-se que,
apesar dos aeroflios possurem maior arrasto, sua sensibilidade a perturbaes de geometria,
ou a alteraes na incidncia do escoamento, menor que do aeroflio de base ( excesso do
aeroflio A1 para robustez angular). Porm, a diferena entre a robustez nos aeroflios C1 e D1
j no to pronunciada, embora o desempenho do aeroflio D1 seja pior que o de C1. Neste
ponto, para a escolha do aeroflio resultante entra a deciso do projetista, ponderando sobre
os demais ndices de desempenho que no foram modelados na funo objetivo. Os aeroflios
B1 ou C1 podem ser os mais indicados para uma anlise posterior, por exemplo. Pode-se ob-
servar na curva polar mostrada na Figura 7.8 que a caracterstica laminar instvel do aeroflio
C1 foi eliminada em comparao do NACA 65
1
412, custa de um maior arrasto na condio
nominal de C
L
= 0,54.
Na otimizao de aeroflios isolados, a forma geomtrica dos aeroflios e o ngulo de
incidncia em relao corrente livre so obtidos da inverso das curvas de velocidade. Para
7.2. Grade Geradora - Aeroflio NACA 65
1
810 83
0
0.25
0.5
0.75
1
1.25
1.5
0 0.25 0.5 0.75 1
V
e
l
o
c
i
d
a
d
e
,
w
/
w
Corda, p.u.
A1
0
0.25
0.5
0.75
1
1.25
1.5
0 0.25 0.5 0.75 1
B1
0
0.25
0.5
0.75
1
1.25
1.5
0 0.25 0.5 0.75 1
C1
0
0.25
0.5
0.75
1
1.25
1.5
0 0.25 0.5 0.75 1
D1
Figura 7.4: Curvas de velocidade e geometria para os aeroflios A1, B1, C1 e D1.
grades, mais um parmetro necessrio para a especicao da geometria, a solidez. Isto ser
visto na prxima seo.
7.2 Grade Geradora - Aeroflio NACA 65
1
810
O segundo exemplo de utilizao da metodologia desenvolvida neste trabalho foi o de
otimizao de uma grade geradora. De maneira similar apresentada no primeiro exemplo, as
84 Captulo 7. Exemplos de Aplicao da Metodologia
NACA 65
1
412
A1
NACA 65
1
412
C1
A1
C1
Figura 7.5: Comparao da geometria (escala aumentada). Aeroflios de base, A1 e C1.
variveis a serem otimizadas so os pontos de controle das parametrizaes das distribuies
de velocidade. Porm, neste caso, uma varivel a mais includa: a solidez da grade. Como foi
visto anteriormente, este parmetro est diretamente ligado ecincia da grade, por meio do
coeciente de perdas e no desvio do escoamento.
A grade escolhida como grade de base para este exemplo utiliza o aeroflio NACA
65
1
810, possui solidez =1, e um ngulo de entrada do escoamento de
1
= 45
. J foi vista
uma comparao entre o modelo de clculo das perdas adotado neste trabalho, e os resultados
7.2. Grade Geradora - Aeroflio NACA 65
1
810 85
0.00475
0.005
0.00525
0.0055
0.00575
0.006
0.00625
4.5 5 5.5 6 6.5 7 7.5 8 8.5
C
D
1/Robustez x 10
-4
, adim.
Aerofo lio NACA 65
1
-412
Aerofo lio A1
" B1
" C1
" D1
Figura 7.6: Robustez perturbao da forma dos aeroflios otimizados e de base.
0.00475
0.005
0.00525
0.0055
0.00575
0.006
0.00625
0.0065
1 1.25 1.5 1.75 2 2.25 2.5 2.75 3 3.25 3.5
C
D
1/Robustez x 10
-4
, adim.
Aerofo lio NACA 65
1
-412
Aerofo lio A1
" B1
" C1
" D1
Figura 7.7: Robustez perturbao da incidncia para os aeroflios otimizados e o de base.
experimentais para esta grade, na Figura 6.5, pgina 68. Como ponto de base, foi escolhida
a incidncia de
i
= 14
. O motivo dessa escolha que, para esta grade, este o ponto de
mxima razo C
L
/C
D
, isto , equivalente mnima relao
v
/
y
, ou perda / desvio. Incidn-
cias menores no sero to ecientes, e incidncias maiores causam um rpido crescimento do
coeciente de perdas, pelo aumento excessivo da rea descolada sobre o lado de suco das ps.
De uma certa maneira, este um ponto de relativa instabilidade para o escoamento nesta grade.
86 Captulo 7. Exemplos de Aplicao da Metodologia
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
1.1
1.2
0 0.002 0.004 0.006 0.008 0.01 0.012
C
o
e
f
i
c
i
e
n
t
e
d
e
S
u
s
t
e
n
t
a
c,
a -
o
,
C
L
Coeficiente de Arrasto, C
D
65
1
412
Perfil C1
Figura 7.8: Comparao entre NACA 65
1
412 e aeroflio otimizado C1.
7.2.1 Denio do Problema
O objetivo o de encontrar uma grade de alta ecincia (baixa valor das perdas), que
produza a deexo do escoamento conforme especicado, e que possua a mais baixa sensibili-
dade a perturbaes em sua geometria. Assim, deseja-se um ngulo de deexo do escoamento
de = 18
(
1
= 45
e
2
= 27
). O nmero de Reynolds baseado na velocidade w
, e
tomado como Re = 215.000
1
. O uso de w
como base de clculo se deve ao fato desta ser a
referncia para o algoritmo de camada-limite.
A distribuio de velocidades no contorno deste aeroflio pode ser vista na Figura 6.2,
pgina 62. Tambm nesta gura esto: as posies dos pontos de controle para os lados de
suco e presso, e as faixas permissveis para a gerao da populao. De maneira diversa ao
primeiro exemplo, neste caso ambos os lados de presso e suco foram otimizados. O nmero
de variveis de projeto usado foi 15: 7 para cada lado do aeroflio, mais a solidez. As curvas
foram representadas por meio de 9 pontos de controle cada, com caractersticas dadas na Tabela
7.3 (a velocidade no bordo de fuga foi xada em w
te
=0,825).
O problema de otimizao foi posto como a minimizao da perda da grade, dada pela
1
De acordo com Emery et al. (1958), o nmero de Reynolds dos ensaios foi de 245.000. O uso de um valor
menor neste trabalho se deve ao fato da velocidade tomada como base de clculo ser w
e no w
1
como nos
ensaios. Foi feita uma correo no valor do Re para compensar esta diferena.
7.2. Grade Geradora - Aeroflio NACA 65
1
810 87
Tabela 7.3: Faixas de variao dos pers de velocidade para a grade geradora.
Abcissas Ordenada Limite Limite Ordenada Limite Limite Faixa de Faixa de
dos Pontos dos Pontos Superior Inferior dos Pontos Superior Inferior Variao Variao
de Controle (Suco) (Suco) (Suco) (Presso) (Presso) (Presso) (Suco) (Presso)
0,001 1,2 1,6 1,2 0,52 0,7 0,5 0,4 0,2
0,025 1,67 1,8 1,3 0,77 0,9 0,6 0,5 0,3
0,050 1,47 1,8 1,3 0,84 0,95 0,7 0,5 0,25
0,10 1,44 1,7 1,3 0,90 1,0 0,8 0,4 0,2
0,30 1,38 1,6 1,25 0,99 1,1 0,9 0,35 0,2
0,70 1,17 1,3 1,1 0,90 0,93 0,87 0,2 0,06
0,95 0,95 1,0 0,95 0,76 0,78 0,72 0,05 0,05
Equao 4.65:
Max[
T,B
] Min
_
y
_
(4.65)
O segundo objetivo, dado pela Equao 6.2:
Min
_
Var
_
y
__
= Min
_
1
n
p
i=1
__
y
_
y
_
i
_
2
_
(6.2)
As seguintes restries foram impostas:
1. Limites inferior e superior para ambos os lados de presso e suco foram especicados;
2. Os limites inferior e superior para a solidez, 0,5 1,5;
3. Deexo especicada;
4. Nmero de inexes para ambas as curvas de velocidade menor ou igual a 3.
O fator de penalizao aplicado foi F
p
=1000, de modo a tentar evitar que indivduos
um pouco fora das especicaes, mas com boa ecincia, fossem considerados para inverso.
Foram penalizados valores de deexo do escoamento 0,1
fora da especicao, e o nmero
de inexes das curvas de velocidade 3.
A aplicao das perturbaes para o clculo da robustez foi feito sobre os pontos de con-
trole, da mesma forma como na seo anterior. Porm, neste caso, o nmero de sub-indivduos
sobre os quais foi calculado o desempenho foi de 28: 7 pontos de controle por lado (suco
e presso), 2 perturbaes por ponto. Tambm foi considerado parte das amostras o indivduo
no-perturbado, resultando portanto em um total de 29 amostras para o clculo da varincia.
88 Captulo 7. Exemplos de Aplicao da Metodologia
7.2.2 Otimizao da Grade Difusora
Os parmetros do algoritmo otimizador para esta grade foram: populao de 15 vezes o
nmero de variveis, ou seja, 225 indivduos. O nmero mximo de iteraes foi ajustado para
200, e este valor foi atingido, terminando a otimizao. O valor da tolerncia utilizado foi de
10
6
para alteraes no espalhamento dos indivduos na frente de Pareto entre geraes. Apesar
de se ter atingido o limite de geraes sem que se tenha atingido a tolerncia mnima do critrio
de convergncia, o exemplo no invalidado, como ser visto no que segue.
Na Figura 7.9, vista a frente de Pareto para o caso estudado. Nota-se, numa primeira
inspeo, duas caractersticas principais: a grande diferena relativa entre os valores da robustez
para as grades geradas, e o rpido aumento da perda, sob o efeito do elevado fator de penal-
izao. Novamente, deste resultado, algumas grades foram selecionadas para inverso e seus
resultados foram comparados grade de base.
Na Figura 7.10, so vistos os pers de velocidade das grades selecionadas, bem como
os pers produzidos. As diferenas no so grandes entre os 3 aeroflios e o perl de base,
vistos em escala to reduzida. Porm, deve ser tambm observado, neste caso, a solidez entre
as grades. Podem ser vistas na Tabela 7.4 suas caractersticas no ponto calculado. H uma
expressiva diminuio da solidez para as 3 grades produzidas, em comparao grade de base.
Isto signica que, para uma mesma deexo, as grades esto sujeitas a um maior carregamento
aerodinmico.
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
0.1
0.01 0.012 0.014 0.016 0.018 0.02
P
e
r
d
a
p
e
n
a
l
i
z
a
d
a
,
a
d
i
m
.
Vulnerabilidade (1/Robustez), adim
Grade A
Grade B
Grade C
Figura 7.9: Frente de Pareto obtida aps a otimizao para grades geradoras.
Este maior carregamento pode ser notado na Figura 7.11, comparando as distribuies de
7.2. Grade Geradora - Aeroflio NACA 65
1
810 89
0
0.25
0.5
0.75
1
1.25
1.5
0 0.25 0.5 0.75 1
V
e
l
o
c
i
d
a
d
e
,
w
/
w
Corda, norm.
65
1
-810
0
0.25
0.5
0.75
1
1.25
1.5
0 0.25 0.5 0.75 1
A
0
0.25
0.5
0.75
1
1.25
1.5
0 0.25 0.5 0.75 1
B
0
0.25
0.5
0.75
1
1.25
1.5
0 0.25 0.5 0.75 1
C
Figura 7.10: Pers de velocidade para as grades selecionadas da frente de Pareto.
Tabela 7.4: Caractersticas da grade de base e das grades geradoras selecionadas.
Grade Solidez ngulo de Perda Vulnerab. Perda Vulnerab.
montagem, (Inverso) % (Inv.) (Direto) % (Dir.)
65
1
-810 1,0 31,0
- - 3,5810
2
8,5010
4
A 0,82 31,0
2,25 10
2
2,0110
2
2,5410
2
9,4710
4
B 0,83 31,6
2,3610
2
1,4810
2
2,7310
2
7,8710
4
C 0,84 30,8
2,4610
2
1,1510
2
2,9610
2
6,7110
4
90 Captulo 7. Exemplos de Aplicao da Metodologia
velocidade entre a grade Ae a grade de base. Ele similar emtodas outras grades. As diferenas
no carregamento aerodinmico entre as grades produzidas , tambm, aparentemente pequena.
Com uma solidez aproximadamente igual e a mesma deexo do escoamento, natural que as
curvas sejam parecidas. Mas as diferenas so notveis ao expandir os aeroflios gerados. Isto
pode ser visto na Figura 7.12 e na Figura 7.13.
Em especial, v-se pela Figura 7.13 um maior arqueamento dos pers gerados, que faz
com que os pers sejam mais carregados. H tambm uma suavizao do lado de presso
dos pers (o intradorso), diminuindo o carregamento deste lado nas proximidades do bordo de
fuga. Apesar do maior carregamento, estas grades so, pela distribuio de velocidades, mais
ecientes que a grade de base. Quanto robustez, seu comportamento visto de forma grca
na Figura 7.14.
0
0.25
0.5
0.75
1
1.25
1.5
0 0.25 0.5 0.75 1
V
e
l
o
c
i
d
a
d
e
,
p
.
u
.
Comprimento molhado, p.u.
NACA 65
1
-810, Solid. 1.0
Grade A, Sol. 0.82
Figura 7.11: Comparao dos pers de velocidade entre a grade de base e a grade A.
Arobustez foi avaliada da mesma forma que no caso do aeroflio isolado, isto , adicionando-
se a um ponto de controle por vez uma perturbao da geometria de aproximadamente 1% da
corda dos pers. Em seguida, a ecincia da congurao deformada foi calculada, e calculou-
se a varincia da ecincia como medida de robustez. Na Figura 7.14, visto que a robustez
relativa entre as grades mantida aps sua inverso. Nota-se que a grade A mais eciente,
porm menos robusta que a grade de base. As grades B e C, por sua vez, so mais ecientes e
tambm mais robustas que a grade de base.
A manuteno da robustez relativa aps o processo de inverso o principal indicativo
da validade deste procedimento. Signica que, avaliando a robustez na distribuio de veloci-
7.2. Grade Geradora - Aeroflio NACA 65
1
810 91
NACA 65
1
810
Perfil A
Perfil B
Perfil C
Figura 7.12: Pers gerados com a otimizao de grades geradoras.
dades, produzem-se grades cujas geometrias so menos vulnervel a perturbaes de formato
dos pers.
Resta avaliar mais uma caracterstica das grades: seu comportamento quanto variao
da direo do escoamento de entrada, isto , do ngulo
1
. possvel que as grades produzidas,
devido ao seu maior carregamento, possuam piores caractersticas operacionais, isto , sejam
mais vulnerveis variao de vazo. Na Figura 7.15, vista a comparao entre as grades,
quanto ao coeciente de presso e sua ecincia com a alterao da vazo. Como visto anteri-
ormente, o coeciente de vazo dado por:
=
1
tg
1
(4.12)
e o coeciente de presso por:
= (2
y
v
) (4.71)
Observando bem a Figura 7.15, nota-se que as grades tm comportamento aproximado
quanto ao coeciente de presso desenvolvido. Porm, quanto sua ecincia, verica-se que
a grade A, menos robusta, possui um pico de ecincia pronunciado, enquanto a grade C, mais
92 Captulo 7. Exemplos de Aplicao da Metodologia
Perfil A
NACA 65
1
810
Perfil B
NACA 65
1
810
Perfil C
NACA 65
1
810
Figura 7.13: Comparao dos pers de grade gerados e de base, escala ampliada.
robusta, possui um plat na regio de maior ecincia. Esta grade, apesar de 0,5% menos e-
ciente que a grade A, possui caractersticas operacionais bastante interessantes na regio de
menores vazes. Por sua vez, a grade B possui ecincia comparvel da grade A, mas seu
pico de ecincia foi deslocado para um valor de vazo um pouco maior que o inicialmente
especicado. Esta tambm uma caracterstica deste mtodo de otimizao. As propriedades
da grade podem ser estimadas com um grau de preciso bastante restrito se comparadas aos
resultados obtenveis com a otimizao direta. Apesar desta restrio, os resultados mostraram
ser bastante satisfatrios, visto que as grades geradoras produzidas utilizando um mtodo de
otimizao com baixo custo computacional apresentaram boas caractersticas de robustez com-
paradas grade de base, alm de uma melhor ecincia.
7.3. Grade Motora - Perl Primrio de Turbina 93
0.02
0.03
0.04
7 8 9 10
P
e
r
d
a
,
a
d
i
m
.
1/Robustez x 10
-4
, adim
NACA 65
1
-810
Grade A
Grade B
Grade C
Figura 7.14: Comparao da robustez relativa entre as grades de base e otimizadas.
0.5
0.6
0.7
0.8
0.9
1
1.1
0.9 1 1.1 1.2 1.3 1.4
C
o
e
f
.
P
r
e
s
s
a
o
Coef. Vazao .
a)
Grade de Base
Grade A
" B
" C
0.92
0.94
0.96
0.98
0.9 1 1.1 1.2 1.3 1.4
E
f
i
c
i
e
n
c
i
a
Coef. Vazao
b)
Grade de Base
Grade A
" B
" C
Figura 7.15: Caractersticas operacionais das grades de base e otimizadas.
7.3 Grade Motora - Perl Primrio de Turbina
Este o terceiro exemplo de utilizao da metodologia desenvolvida. Nele, uma grade
motora ser tomada como base, ainda visando a otimizao de grades robustas. Esta grade
possui as seguintes caractersticas: Perl Primrio NACA (Dunavant e Erwin, 1956), espessura
94 Captulo 7. Exemplos de Aplicao da Metodologia
mxima de 0,1c, ngulo de arqueamento
c
=65
, solidez =1,5, ngulo de montagem =
35,2
, ngulo de entrada do escoamento
1
=0
e ngulo de incidncia
1
=35,2
. O ngulo
de arqueamento o ngulo interno interseco das tangentes da linha de cmber no bordo de
ataque e de fuga do perl. Este perl visto na Figura 7.16.
Figura 7.16: Perl Primrio NACA, arqueamento
c
=65
, espessura mxima 0,1c.
A vericao do modelo de representao para grades motoras foi feita para esta mesma
grade, e mostrada na Figura 6.6, pgina 69. Nesta gura vista a boa resposta do modelo,
comparado aos resultados experimentais, mas tambm um diferencial entre este e os outros
exemplos: no ponto de clculo, no h um ponto de instabilidade bem caracterizado. Para a
incidncia de 35,2
, no h proximidade do descolamento ou de uma instabilidade no ponto de
transio laminar-turbulenta.
A otimizao foi feita de maneira similar aos dois exemplos anteriores: foi criada uma
faixa de variao permissvel para o intradorso e extradorso, para as curvas de velocidade sobre
o perl, e cada indivduo teve os pontos de controle de suas curvas de velocidade perturbados
de um valor .
7.3.1 Denio do Problema
Deseja-se encontrar uma grade motora que, para um dado ngulo de entrada do escoa-
mento
1
e deexo do escoamento =
2
1
, tenha as menores perdas. Deseja-se tambm
que esta grade seja menos sensvel a perturbaes na sua geometria. Assim, novamente:
Max[
T,B
] Min
_
y
_
(4.65)
e:
Min
_
Var
_
y
__
= Min
_
1
n
p
i=1
__
y
_
y
_
i
_
2
_
(6.2)
7.3. Grade Motora - Perl Primrio de Turbina 95
Sujeitos s seguintes restries:
1. Limites inferior e superior para a distribuio de velocidades sobre as ps, tanto no in-
tradorso como no extradorso (Figura 7.17);
2. Limites para os valores possveis da solidez, [1,0 1,5];
3. Limite no nmero de inexes permitidas s curvas de velocidade (3);
4. Velocidade especicada no bordo de fuga;
5. Deexo do escoamento dentro da faixa de 1% do valor especicado de 49,5
.
6. Limite mximo permissvel do valor de
v
/
y
de 0,2 (grades com perda acima deste valor
foram eliminadas por meio da penalizao de ambos objetivos).
0
0.5
1
1.5
2
0 0.2 0.4 0.6 0.8 1
V
e
l
o
c
i
d
a
d
e
,
w
/
w
,
p
.
u
.
Comprimento de superficie, adim., p.u.
Grade de base
Pontos de controle
Limites
Figura 7.17: Distribuio de velocidades da grade selecionada,
1
= 0
, incidncia de 35,2
, solidez
= 1,5.
As distribuies de velocidade foramrepresentadas por meio de 9 pontos de controle cada,
mostrados na Tabela 7.5 (a velocidade no bordo de fuga foi xada em w
te
=1,29, e novamente
as abcissas 0 e 1 so xas). O fator de penalizao usado foi tambm de Fp = 1000, como nos
exemplos anteriores. A populao foi tambm de 225 indivduos, e o limite de geraes foi de
ajustado para 300, mantidos os outros parmetros do algoritmo de otimizao.
96 Captulo 7. Exemplos de Aplicao da Metodologia
Tabela 7.5: Faixas de variao dos pers de velocidade para a grade motora.
Abcissas Ordenada Limite Limite Ordenada Limite Limite Faixa de Faixa de
dos Pontos dos Pontos Superior Inferior dos Pontos Superior Inferior Variao Variao
de Controle (Suco) (Suco) (Suco) (Presso) (Presso) (Presso) (Suco) (Presso)
0,001 1,0 1,6 1,0 0,48 0,7 0,3 0,6 0,4
0,025 1,45 2,0 1,2 0,59 0,9 0,3 0,8 0,6
0,050 1,63 2,0 1,3 0,66 0,95 0,4 0,7 0,55
0,10 1,72 2,0 1,3 0,68 1,0 0,4 0,7 0,6
0,30 1,63 1,8 1,25 0,82 1,1 0,6 0,55 0,5
0,70 1,41 1,6 1,25 1,13 1,2 0,9 0,35 0,3
0,95 1,31 1,5 1,25 1,24 1,27 1,1 0,25 0,17
7.3.2 Otimizao da Grade Motora
O algoritmo encerrou sua execuo aps 300 iteraes, sem atingir o limite de tolerncia,
da mesma maneira que no caso anterior. Apesar disso, a convergncia para o caso foi consider-
ada suciente, dado o bom espalhamento de indivduos pela frente de Pareto e convergncia
em torno de um valor mdio de distncia (crowding distance, pgina 56) entre os indivduos
j aps 150 geraes (gura no mostrada). A frente de Pareto correspondente otimizao
mostrada na Figura 7.18.
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
0.18
0.02 0.04 0.06 0.08
F
a
t
o
r
d
e
P
e
r
d
a
,
a
d
i
m
.
Vulnerabilidade (1/Robustez), adim
Grade A
Grade B
Grade C
Figura 7.18: Frente de Pareto para a otimizao da grade motora.
visto na Figura 7.18, de maneira anloga otimizao da grade geradora, um grande
efeito devido penalizao da violao das restries, e um bom espalhamento de grades de
bom desempenho, no tocante sua robustez. Destas grades, 3 foram escolhidas para serem
7.3. Grade Motora - Perl Primrio de Turbina 97
invertidas e comparadas grade de base. Os resultados podem ser vistos na Tabela 7.6, e os
pers aps a inverso podem ser vistos na Figura 7.19, e em escala expandida, na Figura 7.20.
Pela tabela, nota-se que houve uma reduo da solidez das grades, o que, como visto, causa uma
diminuio das perdas da grade. Esta diminuio, porm, no produziu resultados melhores que
os da grade de base para as duas grades de maior robustez (B e C), enquanto a grade considerada
menos robusta pela frente de Pareto (A) teve uma ecincia superior da grade de base.
Nota-se tambm uma reduo aprecivel na espessura dos pers. Isto ocorreu por que no
se restringiu a faixa de espessuras como foi feito no caso do aeroflio isolado. Isto far parte
das discusses quando da concluso do trabalho, Captulo 8.
Tabela 7.6: Caractersticas da grade de base, e das grades selecionadas, grades motoras
Grade Solidez ngulo de Perda Vulnerab. Perda Vulnerab.
montagem, (Inverso) % (Inv.) (Direto) % (Dir.)
Base 1,5 -35,2
- - 2,3210
2
4,1810
3
A 1,33 -32,9
1,8610
2
7,0110
2
1,8710
2
2,8710
3
B 1,32 -33,0
1,9610
2
4,0610
2
2,5310
2
2,7210
3
C 1,32 -33,8
2,5210
2
2,0410
2
2,6510
2
2,7610
3
Perfil Primario NACA
Perfil A
Perfil B
Perfil C
Figura 7.19: Pers otimizados e de base para grades motoras.
Realizando a perturbao na geometria das ps, calculou-se a perda para cada grade per-
turbada e em seguida a varincia dos valores. Este resultado visto na Tabela 7.6, e na Figura
98 Captulo 7. Exemplos de Aplicao da Metodologia
Perfil A
Perfil Primario de Turbina NACA
Perfil B
NACA
Perfil C
NACA
Figura 7.20: Pers otimizados e de base comparados em escala expandida.
7.21. Pela gura, v-se que para turbinas a perturbao aplicada aos pers resulta em uma vari-
ao de robustez bem menos caracterizada que para o caso da grade geradora. O efeito da per-
turbao de 1% do valor da corda na posio dos pontos de controle gera pers bem diferentes
do original, como pode ser visto na Figura 7.22, para o perl C. Mesmo assim, a diferena no
valor de robustez entre os aeroflios otimizados muito pequena, para a variao do parmetro
de perdas
v
/
y
apresentada por estes aeroflios. Entre os aeroflios B e C, nota-se uma ligeira
inverso entre a robustez apresentada na frente de Pareto e a robustez aps a perturbao das
geometrias obtidas. Porm, ainda assim, a robustez relativa entre as grades otimizadas e a grade
de base de aproximadamente o dobro, para as mesmas perturbaes. Os pers produzidos,
embora no se possa considerar relevante sua diferena de robustez, so muito mais resistentes
7.3. Grade Motora - Perl Primrio de Turbina 99
s perturbaes aplicadas que o perl tomado como base. Em particular, a grade A tambm
mais eciente que a grade de base, podendo ser adotada como soluo de projeto.
0.015
0.02
0.025
0.03
2 2.5 3 3.5 4 4.5 5
F
a
t
o
r
d
e
P
e
r
d
a
,
a
d
i
m
.
Vulnerabilidade (1/Robustez) (x 10
-3
), adim
NACA Prim. Turb.
Grade A
Grade B
Grade C
Figura 7.21: Comparao da robustez entre as grades otimizadas, e de base.
Figura 7.22: Geometrias perturbadas para o aeroflio C, mostradas a ttulo ilustrativo.
Verica-se que, de acordo com o exemplo para grades motoras, a robustez relativa entre
as grades produzidas pelo processo de otimizao pode no ter um efeito to aprecivel quanto
para grades geradoras. Porm, em relao grade original, os resultados so bem mais expres-
sivos, observando-se neste caso para as grades timas, valores de varincia de cerca da metade
do valor para a grade de base.
100 Captulo 7. Exemplos de Aplicao da Metodologia
7.4 Recapitulao
Neste captulo, foram vistos 3 exemplos de aplicao da metodologia desenvolvida. O
primeiro exemplo, para um perl isolado, mostrou que, tendo por base um aeroflio laminar, a
otimizao levando em conta a robustez elimina a instabilidade do ponto de transio laminar-
turbulento, porm com um aumento do arrasto produzido pelos aeroflios gerados. No segundo
exemplo, para uma grade geradora, grades robustas produzidas tiveram uma ecincia maior
que a grade de base, com um maior carregamento aerodinmico e menor solidez, mas tambm
apresentaram curvas mais favorveis de ecincia. No terceiro exemplo, grades motoras foram
produzidas, com ecincias comparveis da grade de base, porm com ecincia menos sen-
svel perturbaes em seu formato.
No captulo seguinte, conclui-se esta dissertao, tendo em vista os resultados obtidos
como uso desta metodologia e suas possibilidades futuras, visando o prosseguimento da pesquisa
nesta linha ou alterando direes em outras linhas de pesquisa.
Captulo 8
Concluses e Sugestes para
Trabalhos Futuros
Neste trabalho, foi mostrada uma metodologia de projeto inverso de grades de turbomquinas
e aeroflios isolados que leva em conta possveis erros de geometria das ps, porm modela-
dos como perturbaes das distribuies de velocidade sobre estes aeroflios, isolados ou em
grade. A proposta inicial foi de vericar a possibilidade de correspondncia entre a robustez a
perturbaes na distribuio de velocidades, e a robustez da forma geomtrica nal diante de
perturbaes diretas na geometria. Dois aspectos so pouco explorados na literatura:
1. A idia central do trabalho, de considerar a robustez a priori, ou seja, antes da forma
geomtrica ser conhecida;
2. A forma de efetuar as perturbaes, utilizando B-splines como forma de parametrizao
e ao mesmo tempo como instrumento de aplicao das perturbaes.
3. Selecionado o melhor perl, a montagem do mapa de desempenho.
Em especial, outros trabalhos utilizando a considerao da robustez durante a otimizao
inversa no foram encontrados pelo autor no momento em que este texto foi escrito. Mas
apesar de poucas publicaes sobre projeto aerodinmico robusto utilizando mtodos inversos,
os exemplos mostrados no Captulo 7 sugerem que h bem mais a ser explorado na tcnica
desenvolvida neste trabalho. Tomando por base o que foi feito em termos de explorao desta
tcnica, as concluses neste captulo podem ajudar outros trabalhos que venham a ser feitos
neste assunto.
101
102 Captulo 8. Concluses e Sugestes para Trabalhos Futuros
8.1 Diversos Aspectos da Metodologia
O trabalho como um todo foi composto por vrias tcnicas isoladas: ajuste de curvas
B-spline aos pers de velocidade de base, utilizao de um mtodo integral de camada-limite
para obteno das perdas da grade (e arrasto de aeroflios isolados), parametrizao das formas
dos aeroflios em curvas de Bzier, a tcnica de aplicao das perturbaes, entre outras. No
que segue, uma anlise ser feita segundo a tica do autor sobre alguns aspectos relevantes dos
procedimentos e seus resultados.
8.1.1 B-splines para Parametrizao de Curvas
No Captulo 3, foi vista a utilizao de curvas de Bzier e B-splines na parametrizao
de pers e curvas de velocidade. Em especial, as B-splines foram utilizadas com sucesso na
representao de pers de velocidade. Isto foi visto por meio dos testes feitos utilizando a
metodologia desenvolvida, no Captulo 6, pgina 68. O fato de que, segundo a formulao
de camada-limite integral, apenas a primeira derivada da velocidade deve ser contnua, torna
natural a escolha da B-spline como forma de parametrizao, em detrimento da Bzier. A exi-
bilidade das curvas obtidas com esta forma de representao aumenta o nmero de distribuies
de velocidade possveis dentro do espao de solues do problema, as faixas permitidas para a
gerao da populao.
Nos exemplos estudados, porm, apenas as ordenadas foram permitidas variar. Nesse
ponto, pode-se fazer um adendo tcnica, adicionando tambm as abcissas como variveis,
dentro de faixas, assim aumentando ainda mais as possibilidades de se cobrir a parcela mais
relevante do espao de solues. Outras tcnicas, como o aumento da multiplicidade em certos
ns, podem simular a presena de choques sobre as ps, aumentando assim a aplicabilidade
do mtodo tambm a escoamentos compressveis (Obayashi e Takanashi, 1996). Estas modi-
caes no alteram a losoa bsica da considerao da robustez a priori, mas sim aumentam
sua aplicabilidade aos escoamentos e problemas reais da escolha das grades. H um aumento do
custo computacional a ser levado em conta, quando so feitas ampliaes no procedimento de
clculo. Esse fator, entretanto, ainda diminuto se comparado opo de se realizar a otimiza-
o por mtodos diretos, ou seja, atacando diretamente a geometria das grades e levando em
conta tambm sua robustez.
As possibilidades ainda so grandes, e as direes para explorao, vrias, no uso de B-
splines como representao de distribuies de velocidade. Apesar do presente trabalho no ser
conclusivo em todos os ramos de explorao desta tcnica, aponta que sua utilizao pode se
tornar um fator diferencial importante no projeto de turbomquinas robustas.
8.1. Diversos Aspectos da Metodologia 103
8.1.2 Modelos Integrais de Camada-limite
O mtodo de clculo desenvolvido apoiou-se fortemente nos resultados obtidos pelos
modelos de camada-limite. Foi visto em todos os casos que uma certa instabilidade no de-
senvolvimento da parte viscosa do escoamento fator preponderante na obteno de formas ro-
bustas e ecientes de pers aerodinmicos. A eliminao da faixa laminar no caso do aeroflio
isolado, e o plat apresentado pela grade difusora, ambos vistos com clareza para os indivduos
mais robustos, uma mostra da importncia da estabilidade da parcela viscosa na robustez das
formas aerodinmicas.
No caso das turbinas, isso foi menos acentuado entre as grades produzidas, mas ainda
assim foi visto que essas grades so mais robustas que a grade original. Isso se deve provavel-
mente falta de instabilidades na proximidade do ponto onde o clculo foi efetuado. Os ex-
emplos mostrados nas Figuras 7.1 e 6.5 mostram a existncia de tais instabilidades na tocante
operacionalidade dos aeroflios isolados e grades difusoras, enquanto que, para a grade acel-
eradora, na Figura 6.6 (pgina 69) no se observa instabilidade prxima ao ponto de clculo
escolhido.
Assim, o modelo de camada-limite de suma importncia, no s na avaliao do de-
sempenho das formas aerodinmicas, mas tambm na avaliao de sua robustez. A correta
captura dos efeitos de transio e descolamento pelas tcnicas semi-empricas, calibradas para
uso especco em aeroflios por meio de resultados experimentais, apresentaram boa preciso
para este trabalho exploratrio. uma tcnica simples, mas ainda possuem aplicabilidade e
resultados de grande valia.
8.1.3 Caracterizao das Incertezas
Neste trabalho, este ponto no foi explicitamente abordado. Entretanto, mais estudos de-
vem ser efetuados na direo de se caracterizar corretamente a origem e a intensidade dos erros
de formato, ou de variabilidades operacional. Ambos os tipos de incertezas foram simultane-
amente tratadas durante a otimizao inversa, ou seja, no houve, por parte da metodologia,
possibilidade de se discernir entre uma origem ou outra da incerteza. A aplicao de pertur-
baes s curvas de velocidade levaram, em geral, a aeroflios e grades robustas em um aspecto
global. No foi feito neste trabalho uma pesquisa sistemtica comparativa dos efeitos de difer-
entes maneiras de tratamento das incertezas e posterior comparao dos resultados de robustez
operacional e geomtrica. Porm, esta linha de pesquisa de extrema importncia, a m de
melhorar a compreenso da tcnica de aplicao das perturbaes, e de extrair dos algoritmos
de otimizao resultados os mais conveis possveis.
104 Captulo 8. Concluses e Sugestes para Trabalhos Futuros
8.1.4 Aplicao das Perturbaes
Como citado anteriormente no Captulo 6, pgina 63, as perturbaes tanto sobre as dis-
tribuies de velocidade quanto sobre as formas geomtricas nais foram feitas utilizando as
prprias curvas de Bzier e B-splines de parametrizao, aplicando-se as perturbaes sobre
os pontos de controle. Embora esta aproximao tenha surtido o efeito desejado, h algumas
consideraes a serem feitas.
Na Figura 6.3 (pgina 63), as perturbaes de forma aplicadas ao aeroflio utilizado pro-
duzem as distribuies de velocidade mostradas na Figura 6.4 (pgina 64). Mas a alterao da
posio dos pontos de controle das curvas de Bzier resultam em formas suaves, incapazes de
capturar perturbaes localizadas, como ressaltos abruptos ou o resultado de impactos. Out-
ras maneiras de aplicao das perturbaes geometria podem ser consideradas. As citadas
funes de Hicks-Henne (pgina 63) so uma alternativa para estes casos. Tambm podem ser
usadas B-splines de perturbao, somadas s Bzier de coordenadas dos aeroflios.
J no caso das curvas de velocidade, a utilizao de B-splines esbarra em uma diculdade:
o modelamento do pico de velocidade nas proximidades do bordo de ataque, para grandes n-
gulos de incidncia. Neste caso, pode-se tambm utilizar pesos em determinados pontos de
controle das B-splines, de modo a aumentar a atrao destes pontos sobre a curva. Mais in-
formaes sobre estas diferentes formas de parametrizao utilizando as B-splines podem ser
encontradas em Piegl e Tiller (1996) e Rogers (2001).
8.1.5 A Caracterizao da Robustez
Conforme o trabalho de levantamento do estado da arte feito por Beyer e Sendhoff (2007),
a maioria das avaliaes da robustez encontradas na literatura at o momento baseada na
amostragem mltipla do mesmo indivduo, sob o efeito dos parmetros de projeto adicionados
s incertezas. Isto feito a m de estimar os momentos (mdia, varincia), utilizados na carac-
terizao da robustez. Mas uma outra tcnica citada neste mesmo trabalho a da possibilidade
dos algoritmos genticos atuarem como estimadores de robustez por si mesmos, ou seja, que
otimizaes mono-objetivo tambmresultememindivduos robustos. Intuitivamente, como se
os indivduos em particular sejam mais ou menos adaptados aos critrios de seleo, mas a pop-
ulao como um todo, ao convergir, seja em conjunto robusta. Ou seja, os efeitos dos agentes
de mutao e cruzamento tornem o indivduo mdio (por exemplo, que tenha como parmetros
de projeto, a mdia dos parmetros de projeto de toda a populao nal j convergida) seja
naturalmente robusto
1
.
1
Nesse aspecto, deve ser considerado que o agente de mutao tenha ordem de grandeza comparvel a da
incerteza associada a cada fentipo, a m de corretamente aplicar as perturbaes esperadas para o sistema mod-
elado. Mesmo pacotes comerciais como o MatLab permitem a incluso de funes de mutao mais adaptadas ao
problema atacado.
8.1. Diversos Aspectos da Metodologia 105
A armao acima foi pouco estudada, ainda citando Beyer e Sendhoff (2007). O teste
desta hiptese no foi feito neste trabalho, no qual se optou por uma aproximao mais conser-
vativa
2
da avaliao da robustez, mas concentrando esforos no estudo da aplicao do conceito
de projeto robusto otimizao por mtodos inversos. Porm, em trabalhos futuros, a validao
dos algoritmos genticos como geradores de populaes robustas por si, pode reduzir ainda
mais o custo computacional associado ao projeto na presena de incertezas.
8.1.6 A Inverso da Distribuies de Velocidades em Formas Ge-
omtricas
Neste trabalho, no foi o foco central a inverso dos pers de velocidade para a obteno
da geometria das grades ou de aeroflios isolados. Porm, sua importncia no pode ser rele-
gada a um segundo plano. A tcnica de inverso tambm cara computacionalmente, mas alm
disso, sua delidade realidade que vai determinar a aplicabilidade do mtodo a problemas
reais.
Neste trabalho, foi utilizado um modelo potencial simples, com correo do escoamento
nas proximidades do bordo de fuga. Embora os resultados obtidos por esses modelos simples
tenham se aproximado bastante dos ensaios em tnel de vento aos quais foram comparados,
modelos de maior delidade (e tambm maior custo computacional) podem ser usados na in-
verso das grades, visto que o maior nus do processo de otimizao robusta j foi executado
utilizando mtodos inversos de projeto.
Tcnicas utilizando modelos interativos com transpirao da camada-limite, ou utilizando
a formulao diferencial das equaes de Navier-Stokes sobre o domnio discretizado em mal-
has, so independentes da metodologia desenvolvida neste trabalho. Mas a vericao da
manuteno da robustez a priori e a posteriori ao processo de inverso, por um modelo de
alta delidade, seria uma adio de grande importncia compreenso da total potencialidade
da tcnica aqui desenvolvida. O projeto robusto por mtodos inversos, aplicado a escoamentos
compressveis, transnicos e supersnicos, de grande interesse para o barateamento dos custos
de projeto de turbomquinas trmicas.
8.1.7 Extenso para Clculo Tridimensional
Este trabalho foi concentrado no estudo de grades lineares bidimensionais. Porm, os
efeitos relacionados s foras centrfugas e distribuio do trabalho especco ao longo das
ps no podemser desprezados no clculo de mquinas reais. Ametodologia de otimizao aqui
desenvolvida pode ser adaptada para incluir os efeitos centrfugos no modelo de camada-limite
2
Mais utilizada no dia-a-dia e com amplo nmero de publicaes.
106 Captulo 8. Concluses e Sugestes para Trabalhos Futuros
integral, e no clculo do trabalho especco da grade, levando em conta a forma das linhas de
corrente do escoamento, transformando-se assim em quase-tridimensional. J a implementao
da metodologia inversa para ps tridimensionais um passo ainda por ser estudado, quanto
sua possibilidade de sucesso.
8.2 Resumo das Concluses e Propostas Futuras
Aps as consideraes feitas neste captulo, enumeram-se as principais concluses deste
trabalho:
1. A otimizao multiobjetivo aplicada ao projeto aerodinmico de grades e aeroflios iso-
lados robustos por meio de mtodos inversos leva, partindo de uma distribuio de ve-
locidade de um perl ou grade de base, a pers e grades cujo formato menos sensvel a
perturbaes geomtricas se comparados ao perl ou grade original;
2. O uso de grades ou pers isolados como referncia necessrio a m de melhorar a
estimativa dos comprimentos molhados medidos a partir do ponto de estagnao e pro-
gredindo em direo ao bordo de fuga, sobre o extradorso e o intradorso dos pers. Estes
comprimentos so utilizados na estimativa da circulao
u
tendo em mos apenas a dis-
tribuio de velocidades, de modo a avaliar os pers e grades quanto a seu desempenho;
3. A utilizao de B-splines na parametrizao de curvas de distribuio de velocidade, e
a possibilidade explorada neste trabalho de seus pontos de controle sofrerem as pertur-
baes a mde avaliar a robustez daquela distribuio de velocidades revelou-se vlida na
medida em que as B-splines foram capazes de representar um nmero suciente de cur-
vas no domnio de solues, contendo solues mais ecientes e/ou robustas que aquela
tomadas por base;
4. O uso de um modelo simplicado de camada-limite integral, mas capaz de capturar os
efeitos de instabilidade oriundos da transio laminar-turbulenta e do descolamento na
regio do bordo de fuga, suciente para que se obtenham pers de velocidade capazes
de minorar ou eliminar os efeitos destas instabilidades nos aeroflios e grades produzidos.
A metodologia, porm, quando aplicada a pontos de operao distantes dessas instabil-
idades, pode levar a resultados nos quais a avaliao da robustez ca prejudicada pela
baixa sensibilidade do modelo (e tambm dos escoamentos reais) s perturbaes apli-
cadas;
5. A metodologia possui baixo custo computacional, podendo ser utilizada em clculos pre-
liminares antes do uso de modelos de alta delidade.
8.3. Consideraes Finais 107
Algumas sugestes para trabalhos futuros nessa linha de pesquisa foram comentadas ao
longo deste captulo:
1. Uso de B-splines com mais parmetros de controle sobre as curvas geradas;
2. Incluso de efeitos tridimensionais no modelo de camada-limite, e extenso da tcnica
desenvolvida a um contexto de modelagem quase-tridimensional do escoamento;
3. Estudo do efeito dos algoritmos genticos sobre a robustez emotimizaes mono-objetivo;
4. Estudo estatstico dos erros de fabricao, deposio de material (muito comum em com-
pressores) e eroso por abraso em ps de turbomquinas. O conhecimento da localizao
e intensidade dos erros de forma sobre as ps de rotores e estatores de turbomquinas
de grande importncia para o uso do presente mtodo em toda a sua potencialidade.
8.3 Consideraes Finais
Este trabalho exploratrio abre caminhos para diversas vertentes de aplicao da tcnica
ora desenvolvida. Algumas so facilmente capturadas pelo olhar interessado dos pesquisadores-
leitores, outras so difceis de se prever. O desenvolvimento contnuo e acelerado das ferramen-
tas de processamento de dados levam a crer que, em poucos anos (partindo do momento em que
este texto escrito), modelos de alta delidade acoplados a otimizadores robustos e multidisci-
plinares podero ser utilizados em conjunto, com custos computacionais comparveis aos uti-
lizados hoje de maneira corriqueira. O processamento paralelo e as nuvens de processamento
so j neste instante uma realidade, e seu progresso no d ainda mostras de arrefecimento.
Apesar disso, esta tcnica de custo comparativamente baixo, e que em vista dos desdo-
bramentos atuais, tornar-se- brevemente de custo irrisrio, ainda ter no futuro seu nicho de
aplicao nos estudos preliminares de projeto robusto de turbomquinas e aeroflios. Nesse
ponto, ela pode agir como pr-otimizador, gerando indivduos j melhorados para o empil-
hamento na forma de ps tridimensionais a serem alimentadas no otimizador nal, utilizando
modelos de alta delidade. Esse um dos possveis usos futuros da metodologia aqui desen-
volvida. Porm, mais estudos so necessrios at a maturao desta tcnica, e sua utilizao de
maneira irrestrita. A contribuio deste trabalho, no sentido de dar os passos iniciais nesta linha
de pesquisa, ainda pequena comparada s necessidades e possibilidades desta metodologia de
projeto de turbomquinas. Porm, os resultados obtidos so interessantes e as perspectivas de
aprimoramento promissoras.
108 Captulo 8. Concluses e Sugestes para Trabalhos Futuros
Referncias Bibliogrcas
Abbott e von Doenhoff(1959) I. H. Abbott e A. E. von Doenhoff. Theory of Wing Sections.
Dover Publications, Inc.
Amorim(1987) Jos Carlos Cezar Amorim. Clculo do escoamento potencial em pers aerod-
inmicos isolados e em grades de turbomquinas. Dissertao de Mestrado, Universidade
Federal de Itajub, Itajub, Minas Gerais.
Beyer e Sendhoff(2007) H. Beyer e B. Sendhoff. Robust optimization - a comprehensive
survey. Computational Methods Applied to Mechanical Engineering., 196:31903218.
Cebeci et al.(2005) T. Cebeci, J. P. Shao, F. Kafyeke, e E. Laurendeau. Computational Fluid
Dynamics for Engineers - From Panel to Navier-Stokes Methods with Computer Programs.
Horizons Publishing Inc., Long Beach, California.
Coello(2006) C. A. C. Coello. Evolutionary multi-objective optimization: A historical view of
the eld. IEEE Computational Intelligence Magazine., 1:2836.
de Souza(2008) Bruno Silva de Souza. Projeto de pers aerodinmicos utilizando tcnicas
de otimizao mono e multiobjetivos. Dissertao de Mestrado, Universidade Federal de
Itajub, Itajub, Minas Gerais.
Deb(2001) K. Deb. Multi-Objective Optimization using Evolutionary Algorithms. John Wiley
& Sons, Ltd, West Sussex, England, 1 edio.
Deb et al.(2002) K. Deb, A. Pratap, S. Agarwal, e T. Meyarivan. A fast and elitist multiobjective
genetic algorithm: NSGA-II. IEEE Transactions on Evolutionary Computation, 6(2).
Duffner(2008) John D. Duffner. The effects of manufacturing variability on turbine vane per-
formance. Dissertao de Mestrado, Massachussets Institute of Technology.
Dunavant e Erwin(1956) J. C. Dunavant e J. R. Erwin. Investigation of a related series of
turbine-blade proles in cascade. Relatrio Tcnico TN-3802, NACA - National Advisory
Comittee for Aeronautics, Langley Aeronautical Laboratory, Langley Field, Va.
109
110 Referncias Bibliogrcas
Emery et al.(1958) J. C. Emery, L. J. Herrig, J. R. Erwin, e R. Felix. Systematic two-
dimensional cascade tests of naca 65-series compressor blades at low speeds. Relatrio Tc-
nico TR-1368, NACA - National Advisory Comittee for Aeronautics, Langley Aeronautical
Laboratory, Langley Field, Va.
Fernandes(1978) E. C. Fernandes. Anlise do Escoamento em Mquinas de Fluxo Segundo o
Mtodo das Singularidades. ITA - Instituto Tecnolgico da Aeronutica, S. J. dos Campos,
Brazil.
Fupresa(2010) Fupresa. Tolerncias Bsicas para o Projeto de Microfundidos. Fupresa S.A.,
2010. URL .
Gostelow(1984) J. P. Gostelow. Cascade Aerodynamics. Pergamon Press.
Goto e Shirakura(1984) Akira Goto e Masaaki Shirakura. An inverse cascade method for in-
compressible two-dimensional potential ow. Bulletin of JSME, 27(226):653659. primeira
parte de Compressor cascade optimization based on inverse boundary layer method and
inverse cascade method.
Goto et al.(1984) Akira Goto, Masaaki Shirakura, e Hisao Enomoto. An inverse boundary layer
method and wind tunnel tests of optimized compressor cascades with high loading. Bulletin
of JSME, 27(229):13661377. segunda parte de Compressor cascade optimization based on
inverse boundary layer method and inverse cascade method.
Huyse e Lewis(2001) L. Huyse e M. Lewis. Aerodynamic shape optimization of two di-
mensional airfoils under uncertain operating conditions. Relatrio Tcnico 2001-1, ICASE,
NASA Langley Research Center, Hampton, Virginia.
Katz e Plotkin(1991) Joseph Katz e Allec Plotkin. Low-speed aerodynamics - from wing theory
to panel methods. McGraw-Hill Book Co., Singapore.
Keane e Nair(2005) A. J. Keane e P. B. Nair. Computational Approaches for Aerospace Design
- The Pursuit of Excellence. John Wiley & Sons, Ltd.
Kontoleontos et al.(2005) E. Kontoleontos, K. Giannakoglou, e D. Koubogiannis. Robust de-
sign of compressor cascade airfoils, using evolutionary algorithms and surrogate models.
Em Proc. of the 1st International Conference on Experiments, Process and System Mod-
elling,Simulation and Optimization,, Atenas, Grcia.
Kumar et al.(2008) A. Kumar, P. B. Nair, A. J. Keane, e S. Shahpar. Robust design using
bayesian monte carlo. International Journal for Numerical Methods in Engineering, 73:
14971517. doi: 10.1002/nme.2126. URL .
Referncias Bibliogrcas 111
Lamb(2005) Caroline Marie Lamb. Probabilistic performance-based geometric tolerancing of
compressor blades. Dissertao de Mestrado, Massachussets Institute of Technology.
Lee et al.(2008) D. S. Lee, L. F. Gonzalez, J. Periaux, e K. Srinivas. Robust design optimization
using multi-objective evolutionary algorithms. Computers & Fluids, 37:565583. doi: 10.
1016/j.compuid.2007.07.011. URL .
Li et al.(2002) W. Li, L. Huyse, e S. Padula. Robust airfoil optimization to achieve drag re-
duction over a range of mach numbers. Structural and Multidisciplinary Optimization, 24:
3850.
Manzanares Filho(1994) N. Manzanares Filho. Anlise do Escoamento em Mquinas de Fluxo
Axiais. Tese de Doutorado, ITA - Instituto Tecnolgico da Aeronutica, S. J. dos Campos,
Brazil.
Manzanares Filho et al.(2005) Nelson Manzanares Filho, Carlos Alberto Amaral Moino, e
Ariosto Bretanha Jorge. An improved controlled random search algorithm for inverse airfoil
cascade design. Em 6th World Congresses of Structural and Multidisciplinary Optimization.
Mathworks(2008) Mathworks. Genetic algorithm and direct search toolbox users guide.
Manual Online, 2008. URL
.
Moino(2006) Carlos Alberto Amaral Moino. Metodologia para projeto inverso de aeroflios
em grades de turbomquinas via otimizao por busca aleatria controlada. Dissertao de
Mestrado, Universidade Federal de Itajub, Itajub, Minas Gerais.
Moran(1984) J. Moran. An Introduction to Theoretical and Computational Aerodynamics. John
Wiley and Sons, New York, USA.
Obayashi e Takanashi(1996) S. Obayashi e S. Takanashi. Genetic optimization of target pres-
sure distributions for inverse design methods. AIAA, 34(5).
of Illinois at Urbana Champaign UIUC(2009) University of Illinois at Urbana Cham-
paign UIUC. Uiuc airfoil coordinates database. Website, Setembro 2009. URL
.
Oyama et al.(2002) A. Oyama, M.-S. Liou, e S. Obayashi. Transonic axial-ow blade shape
optimization using evolutionary algorithm and three-dimensional navier-stokes solver. Em
9th AIAA/ISSMO Multidisciplinary Analysis and Optimization Conference, number 5642.
Petrucci e Manzanares Filho(2007) Dennis R. Petrucci e N. Manzanares Filho. A fast al-
gorithm for inverse airfoil design using a transpiration model and an improved vortex panel
112 Referncias Bibliogrcas
method. Journal of the Brazilian Society of Mechanical Sciences and Engineering, 29(4):
353364.
Peiderer e Petermann(1974) Carl Peiderer e Hartwig Petermann. Mquinas de Fluxo.
Livros Tcnicos e Cientcos Editora S.A.
Piegl e Tiller(1996) Les Piegl e Wayne Tiller. The NURBS Book. Sringer-Verlag, 2 edio.
Ramirez Camacho e Manzanares Filho(2005) R. G. Ramirez Camacho e N. Manzanares
Filho. A source-wake model for cascades of axial ow turbomachines. Journal of the Brazil-
ian Society of Mechanical Sciences and Engineering, 27(2):288299.
Rao(1996) S. S. Rao. Engineering Optimization - Theory and Practice. John Wiley & Sons,
Inc, 3 edio.
Rogers(2001) D. Rogers. An Introduction to NURBS: with historical perspective. Academic
Press, San Diego, USA.
Sanger(1973) N. L. Sanger. Two-dimensional analytical and experimental performance com-
parison for a compressor stator section with d-factor of 0.47. Relatrio Tcnico TN D-7429,
National Aeronautics and Space Administration, Lewis Research Center, Cleveland, Ohio
44135.
Schlichting(1959) H. Schlichting. Application of boundary-layer theory in turbomachinery.
Transactions of the ASME - Journal of Basic Engineering.
Schlichting e Scholz(1951) H. Schlichting e N. Scholz. ber die theoretische Berechnung der
Strmungsverluste eines ebenen Schaufelgitters. Ingenieur Archiv, 19:4265.
Sivanandam e Deepa(2008) S. N. Sivanandam e S. N. Deepa. Introduction to Genetic Algo-
rithms. Springer-Verlag, Berlin Heidelberg.
Song e Keane(2004) Wenbin Song e A. J. Keane. A study of shape parameterization methods
for airfoil optimization. Em 10th AIAA/ISSMO Multidisciplinary Analysis and Optimization
Conference.
Soong(2004) T. T. Soong. Fundamentals of Probability and Statistics for Engineers. John
Wiley & Sons, Ltd, West Sussex, England.
Taguchi et al.(1990) G. Taguchi, E. A. Elsayed, e T. C. Hsiang. Engenharia da Qualidade em
Sistemas de Produo. Editora McGraw-Hill, Ltda., So Paulo.
Teshima(1976) Kiyomi Teshima. A study of two-dimensional accelerative cascades - an in-
vestigation on the optimum blading and the velocity distribution along the upper surface of
blade. Bulletin of JSME, 19(129):291297.
Referncias Bibliogrcas 113
Thakur et al.(2008) N. Thakur, A. J. Keane, e P. B. Nair. Capture of manufacturing uncertainty
in turbine blades through probabilistic techniques. Em 7th ASMO-UK/ISSMO International
Converence on Engineering Design Optimization.
Weise(2009) Thomas Weise. Global Optimization Algorithms - Theory and Application. Auto-
publicado, 2 edio. URL .
Yang e El-Haik(2009) K. Yang e B. S. El-Haik. Design for Six Sigma - A Roadmap for Product
Development. The Mcgraw-Hill Companies, Inc., 2 edio.
Potrebbero piacerti anche
- Capítulo 2 - Dimensionamento de Chavetas e Estrias-Rev1Documento29 pagineCapítulo 2 - Dimensionamento de Chavetas e Estrias-Rev1CARLOS AUGUSTO LOPEZ Y LOPEZNessuna valutazione finora
- Calendário de Olimpíadarova Da Segunda Fases - MSO - 2023Documento13 pagineCalendário de Olimpíadarova Da Segunda Fases - MSO - 2023JosiiiiNessuna valutazione finora
- Lab 01Documento1 paginaLab 01Diogenes LeonelNessuna valutazione finora
- Ensaio de Modelo Utilizando Simulador RTDS para Validação Dos Ajustes Das Proteções Das LIs de 500kV Entre A Usina Hidrelétrica de Itaipu e A Subestação Foz Do IguaçuDocumento6 pagineEnsaio de Modelo Utilizando Simulador RTDS para Validação Dos Ajustes Das Proteções Das LIs de 500kV Entre A Usina Hidrelétrica de Itaipu e A Subestação Foz Do IguaçusergioribeirotavaresNessuna valutazione finora
- Apostila Metodologia Completa 2012Documento191 pagineApostila Metodologia Completa 2012David AlencarNessuna valutazione finora
- 13 PPC Eco 2015 PDFDocumento111 pagine13 PPC Eco 2015 PDFFrederico Aranha PimentelNessuna valutazione finora
- Mitigação Dos Harmônicos Pelos Transformadores Fechados em Delta-EstrelaDocumento4 pagineMitigação Dos Harmônicos Pelos Transformadores Fechados em Delta-EstrelaJader SousaNessuna valutazione finora
- Manutencao em Equipamentos EletricosDocumento12 pagineManutencao em Equipamentos Eletricoscfresende00100% (1)
- Laboratório de Mudança Na Saúde Do TrabalhadorDocumento334 pagineLaboratório de Mudança Na Saúde Do TrabalhadorEudisney da Silva CostaNessuna valutazione finora
- PPC-MLI 10 09 2017 EMEC CorrigidoPRG v3 06 02 2018Documento76 paginePPC-MLI 10 09 2017 EMEC CorrigidoPRG v3 06 02 2018Danilo FariaNessuna valutazione finora
- UNIFEI ITAJUBÁ Edital Nº 004 - 2020 - PDSE 2021 Doutorado SanduicheDocumento6 pagineUNIFEI ITAJUBÁ Edital Nº 004 - 2020 - PDSE 2021 Doutorado SanduicheNelly VanessaNessuna valutazione finora
- Cartilha Eliminador de ar+-+FINAL+-+25nov2016Documento7 pagineCartilha Eliminador de ar+-+FINAL+-+25nov2016AlanFerrazNessuna valutazione finora
- Relatório de Estágio - GQEE01Documento32 pagineRelatório de Estágio - GQEE01trymskvedaNessuna valutazione finora
- Caderno Curso NasfDocumento180 pagineCaderno Curso NasfMurilo BonetNessuna valutazione finora
- ArtigoDocumento8 pagineArtigoAndre BackupNessuna valutazione finora
- Edital - PPG - Mpepr - 2022-2 - 220607 - 093946Documento8 pagineEdital - PPG - Mpepr - 2022-2 - 220607 - 093946Guilherme AndradeNessuna valutazione finora
- Atributos de Ponderação de Valores em AIADocumento19 pagineAtributos de Ponderação de Valores em AIAJosé Fernando MirandaNessuna valutazione finora
- Livro MAR DE LAMA Rev - 09 - 04 - 19Documento320 pagineLivro MAR DE LAMA Rev - 09 - 04 - 19Luana Aparecida MoreiraNessuna valutazione finora
- Ensaio de Tratabilidade Da Agua P PDFDocumento10 pagineEnsaio de Tratabilidade Da Agua P PDFDéborah AmorimNessuna valutazione finora
- Relatorio Tutoria ExemploDocumento10 pagineRelatorio Tutoria ExemploAluana Santana CarlosNessuna valutazione finora
- RID - Leonardo Kyo KabayamaDocumento4 pagineRID - Leonardo Kyo KabayamaLeonardo Kyo KabayamaNessuna valutazione finora
- Alfabetização Científica e TecnológicaDocumento11 pagineAlfabetização Científica e TecnológicaJorge RicardoNessuna valutazione finora
- Relatório - Hidráulica - Prática 3 - Perfil de Velocidade em Tubo Com PressãoDocumento17 pagineRelatório - Hidráulica - Prática 3 - Perfil de Velocidade em Tubo Com PressãoMAYCON EDUARDO GONCALVES GABRIELNessuna valutazione finora
- ProModel - Modelo 02 - LogísticaDocumento3 pagineProModel - Modelo 02 - LogísticaThayná MardeganNessuna valutazione finora
- Semeando Cientistas - Ciência Criativa em Sequências Didáticas Baseadas Nas Habilidades e Competências Da BNCC - Vol. 1Documento116 pagineSemeando Cientistas - Ciência Criativa em Sequências Didáticas Baseadas Nas Habilidades e Competências Da BNCC - Vol. 1Christiane NascimentoNessuna valutazione finora
- Catalogo 07 PDFDocumento112 pagineCatalogo 07 PDFFlavia GonçalvesNessuna valutazione finora
- Viiicit PD Brentech GT 715 PDFDocumento10 pagineViiicit PD Brentech GT 715 PDFEraldocsNessuna valutazione finora
- ESUD2012Documento16 pagineESUD2012julio arisNessuna valutazione finora
- Resultado PARCIAL Edital Selecao 2016 DAEDocumento32 pagineResultado PARCIAL Edital Selecao 2016 DAEleumasmenNessuna valutazione finora
- Universidade Federal de Itajubá Instituto de Sistemas Elétricos E EnergiaDocumento97 pagineUniversidade Federal de Itajubá Instituto de Sistemas Elétricos E EnergiaEider Henrique Cunha100% (1)