Potrebbero piacerti anche
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Shielded Metal Arc Welding Summative TestDocumento4 pagineShielded Metal Arc Welding Summative TestFelix MilanNessuna valutazione finora
- On Wallace Stevens - by Marianne Moore - The New York Review of BooksDocumento2 pagineOn Wallace Stevens - by Marianne Moore - The New York Review of BooksTuvshinzaya GantulgaNessuna valutazione finora
- Infusion Site Selection and Infusion Set ChangeDocumento8 pagineInfusion Site Selection and Infusion Set ChangegaridanNessuna valutazione finora
- MINIMENTAL, Puntos de Corte ColombianosDocumento5 pagineMINIMENTAL, Puntos de Corte ColombianosCatalina GutiérrezNessuna valutazione finora
- Mathsnacks05 InfiniteDocumento1 paginaMathsnacks05 Infiniteburkard.polsterNessuna valutazione finora
- Thermal Systems: Introduction To Heat TransferDocumento33 pagineThermal Systems: Introduction To Heat TransferParas SharmaNessuna valutazione finora
- Types of Numbers: SeriesDocumento13 pagineTypes of Numbers: SeriesAnonymous NhQAPh5toNessuna valutazione finora
- 1973 PorbaixM LEC PDFDocumento351 pagine1973 PorbaixM LEC PDFDana Oboroceanu100% (1)
- Ghalib TimelineDocumento2 pagineGhalib Timelinemaryam-69Nessuna valutazione finora
- Nastran 2012 Superelements UgDocumento974 pagineNastran 2012 Superelements Ugds_srinivasNessuna valutazione finora
- Childbirth Self-Efficacy Inventory and Childbirth Attitudes Questionner Thai LanguageDocumento11 pagineChildbirth Self-Efficacy Inventory and Childbirth Attitudes Questionner Thai LanguageWenny Indah Purnama Eka SariNessuna valutazione finora
- Chapter One Understanding Civics and Ethics 1.1.defining Civics, Ethics and MoralityDocumento7 pagineChapter One Understanding Civics and Ethics 1.1.defining Civics, Ethics and Moralitynat gatNessuna valutazione finora
- Lead Workplace CommunicationDocumento55 pagineLead Workplace CommunicationAbu Huzheyfa Bin100% (1)
- Time Interest Earned RatioDocumento40 pagineTime Interest Earned RatioFarihaFardeenNessuna valutazione finora
- Thesis FulltextDocumento281 pagineThesis FulltextEvgenia MakantasiNessuna valutazione finora
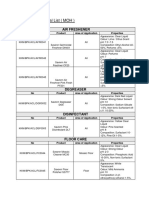
- Approved Chemical ListDocumento2 pagineApproved Chemical ListSyed Mansur Alyahya100% (1)
- Core ApiDocumento27 pagineCore ApiAnderson Soares AraujoNessuna valutazione finora
- Bakhtin's Chronotope On The RoadDocumento17 pagineBakhtin's Chronotope On The RoadLeandro OliveiraNessuna valutazione finora
- Accounting 110: Acc110Documento19 pagineAccounting 110: Acc110ahoffm05100% (1)
- Edc Quiz 2Documento2 pagineEdc Quiz 2Tilottama DeoreNessuna valutazione finora
- ObliCon Digests PDFDocumento48 pagineObliCon Digests PDFvictoria pepitoNessuna valutazione finora
- Thermal Properties of Matter: Centre For Sceince StudyDocumento37 pagineThermal Properties of Matter: Centre For Sceince StudySalam FaithNessuna valutazione finora
- Best-First SearchDocumento2 pagineBest-First Searchgabby209Nessuna valutazione finora
- Kurukku PadaiDocumento4 pagineKurukku PadaisimranNessuna valutazione finora
- Fundamental Rights-Right To Equality, Prohibition of Discrimination, Right To Equality of OpportunityDocumento76 pagineFundamental Rights-Right To Equality, Prohibition of Discrimination, Right To Equality of OpportunityutkarshNessuna valutazione finora
- Viva QuestionsDocumento3 pagineViva QuestionssanjayshekarncNessuna valutazione finora
- The Role of Mahatma Gandhi in The Freedom Movement of IndiaDocumento11 pagineThe Role of Mahatma Gandhi in The Freedom Movement of IndiaSwathi Prasad100% (6)
- CRM - Final Project GuidelinesDocumento7 pagineCRM - Final Project Guidelinesapi-283320904Nessuna valutazione finora
- Alexander Blok - 'The King in The Square', Slavonic and East European Review, 12 (36), 1934Documento25 pagineAlexander Blok - 'The King in The Square', Slavonic and East European Review, 12 (36), 1934scott brodieNessuna valutazione finora
- Counselling and PsychotherapyDocumento12 pagineCounselling and PsychotherapyD.Sreenivasa ReddyNessuna valutazione finora