Potrebbero piacerti anche
- Transformation of Axes (Geometry) Mathematics Question BankDa EverandTransformation of Axes (Geometry) Mathematics Question BankValutazione: 3 su 5 stelle3/5 (1)
- B - Lecture10 The Root Locus Rules Automatic Control SystemDocumento31 pagineB - Lecture10 The Root Locus Rules Automatic Control SystemAbaziz Mousa OutlawZzNessuna valutazione finora
- Chapter 7 - Root Locus TechniquesDocumento39 pagineChapter 7 - Root Locus TechniquesANDREW LEONG CHUN TATT STUDENTNessuna valutazione finora
- Tables of Coulomb Wave Functions: Whittaker FunctionsDa EverandTables of Coulomb Wave Functions: Whittaker FunctionsNessuna valutazione finora
- Root Locus MethodDocumento23 pagineRoot Locus MethodChanoxismNessuna valutazione finora
- Root Locus Diagram - GATE Study Material in PDFDocumento7 pagineRoot Locus Diagram - GATE Study Material in PDFNarendra AgrawalNessuna valutazione finora
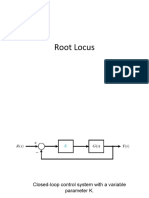
- Root LocusDocumento18 pagineRoot Locussophieee19Nessuna valutazione finora
- Root LocusDocumento114 pagineRoot LocusSwapneel NaphadeNessuna valutazione finora
- Steps LGRDocumento9 pagineSteps LGRGian Carlos ApolinarioNessuna valutazione finora
- Root Locus 1Documento19 pagineRoot Locus 1Jeeva Suria Rajah100% (1)
- Cs 8343 Root Locus Lecture 2Documento98 pagineCs 8343 Root Locus Lecture 2Crescent MnyamaNessuna valutazione finora
- Root LocusDocumento18 pagineRoot LocusgigoNessuna valutazione finora
- 11 Root Locus 1Documento6 pagine11 Root Locus 1athenalavegaNessuna valutazione finora
- 3.ROOT LOCUS Technique - Ruhizan Edit Oct2020Documento42 pagine3.ROOT LOCUS Technique - Ruhizan Edit Oct2020MOHD ENDRA SHAFIQNessuna valutazione finora
- Lec 6 Unit 3 Stability AnalysisDocumento23 pagineLec 6 Unit 3 Stability Analysisharsh singhNessuna valutazione finora
- Lecture7 RootLocusDocumento97 pagineLecture7 RootLocusSchwarz ChimunhuNessuna valutazione finora
- Root Locus: Illustrative ExampleDocumento17 pagineRoot Locus: Illustrative Examplevaibhav471995Nessuna valutazione finora
- Root LocusDocumento26 pagineRoot Locusaty27062004Nessuna valutazione finora
- Clase Lugar Geometrico de Las Raices IDocumento32 pagineClase Lugar Geometrico de Las Raices IJesus Tapia GallardoNessuna valutazione finora
- Root Locus Diagram - GATE Study Material in PDFDocumento7 pagineRoot Locus Diagram - GATE Study Material in PDFAtul Choudhary100% (1)
- Linear Control Systems (EE-3052) : Lecture-12 Introduction To Root LocusDocumento25 pagineLinear Control Systems (EE-3052) : Lecture-12 Introduction To Root Locususama asifNessuna valutazione finora
- Lecture-20 Root Locus Analysis Part-1Documento29 pagineLecture-20 Root Locus Analysis Part-1JameelAhmadNessuna valutazione finora
- Homework-5 Root Locus-SOLUTIONSDocumento17 pagineHomework-5 Root Locus-SOLUTIONSzakir abbasNessuna valutazione finora
- Root LocusDocumento95 pagineRoot LocusPiyooshTripathi100% (1)
- Control System Analysis and Design by Root Locus Method: Sistem Kendali ELS3204 Week 7 Session 1Documento49 pagineControl System Analysis and Design by Root Locus Method: Sistem Kendali ELS3204 Week 7 Session 1Junaidy VandeanganNessuna valutazione finora
- Control SystemsDocumento58 pagineControl Systemsadityasingh273158Nessuna valutazione finora
- Root Locus Method 2Documento33 pagineRoot Locus Method 2Umasankar ChilumuriNessuna valutazione finora
- Lec 6 Unit 3 Stability AnalysisDocumento23 pagineLec 6 Unit 3 Stability Analysisharsh singhNessuna valutazione finora
- EXAMPLE PROBLEMS AND SOLUTIONS Ogata - Root - Locus PDFDocumento32 pagineEXAMPLE PROBLEMS AND SOLUTIONS Ogata - Root - Locus PDFabdulqader100% (3)
- Root LocusDocumento69 pagineRoot LocusDar Nad EemNessuna valutazione finora
- Root LocusDocumento44 pagineRoot LocusDheer MehrotraNessuna valutazione finora
- Prestige Institute of Engineering & Science Indore (M.P.)Documento3 paginePrestige Institute of Engineering & Science Indore (M.P.)SagarManjrekarNessuna valutazione finora
- Root Locus Techniques: ELEC 312Documento21 pagineRoot Locus Techniques: ELEC 312HirenNessuna valutazione finora
- EEE 3153-Control System: Lecture-On Root LocusDocumento54 pagineEEE 3153-Control System: Lecture-On Root LocusNazmul islamNessuna valutazione finora
- LAB No. 10 Analysis of Linear Control System Using Root Loci TechniqueDocumento7 pagineLAB No. 10 Analysis of Linear Control System Using Root Loci TechniqueSanjar BeyNessuna valutazione finora
- Unit 7: Part 2: Refining The Root Locus: Engineering 5821: Control Systems IDocumento15 pagineUnit 7: Part 2: Refining The Root Locus: Engineering 5821: Control Systems INikhil PanikkarNessuna valutazione finora
- Examples of Root LocusDocumento25 pagineExamples of Root LocusNaman DhimanNessuna valutazione finora
- Control System Lab File: Department of Electrical EngineeringDocumento14 pagineControl System Lab File: Department of Electrical EngineeringSAURABH AGRAWALNessuna valutazione finora
- Root Locus Method 2Documento33 pagineRoot Locus Method 2Patel DipenNessuna valutazione finora
- Ogata Root LocusDocumento32 pagineOgata Root Locusvignesh0617100% (1)
- Electrical-Engineering Engineering Control-Systems Root-Locus-Techniques NotesDocumento23 pagineElectrical-Engineering Engineering Control-Systems Root-Locus-Techniques NotesRahul TaldaNessuna valutazione finora
- Modern Control Systems (MCS) : Lecture-2-3-4 Root LocusDocumento28 pagineModern Control Systems (MCS) : Lecture-2-3-4 Root LocusMeer Zafarullah NoohaniNessuna valutazione finora
- 10 Root LocusDocumento13 pagine10 Root LocusAhmed Tanveer Ashraff100% (1)
- Control Systems (CS) : Lecture-8 Root LocusDocumento88 pagineControl Systems (CS) : Lecture-8 Root LocusKiranKumarNessuna valutazione finora
- Systems and ControlDocumento16 pagineSystems and ControlDerrick Maatla MoadiNessuna valutazione finora
- MCE17 Module 7Documento7 pagineMCE17 Module 7cgcastro32Nessuna valutazione finora
- 10 Root Locus AnalysisDocumento78 pagine10 Root Locus Analysisrupu27Nessuna valutazione finora
- Ackerman's FormulaDocumento8 pagineAckerman's FormulaKarthik KumarNessuna valutazione finora
- Revision 1 - SS Error & Root Locus PDFDocumento38 pagineRevision 1 - SS Error & Root Locus PDFdinessrajNessuna valutazione finora
- Root LocusDocumento27 pagineRoot LocusAzmi Bin A MataliNessuna valutazione finora
- Ee481 p10 Root - LocusDocumento37 pagineEe481 p10 Root - Locusminato4thNessuna valutazione finora
- Rootlocus PDFDocumento18 pagineRootlocus PDFNarendra ChaurasiaNessuna valutazione finora
- ME2142/ME2142E Feedback Control Systems Solutions To Tutorial Problems Set 3 March 2007Documento8 pagineME2142/ME2142E Feedback Control Systems Solutions To Tutorial Problems Set 3 March 2007desmondlimmNessuna valutazione finora
- Final End Sem Solution-2018Documento9 pagineFinal End Sem Solution-2018Sriram MudunuriNessuna valutazione finora
- Lecture 3 Examples of Root LocusDocumento25 pagineLecture 3 Examples of Root LocusNaddaa MohamedNessuna valutazione finora
- Lecture 9-Root LocusDocumento92 pagineLecture 9-Root LocusStieve NjorogeNessuna valutazione finora
- F3 Ch-8 Root LocusDocumento25 pagineF3 Ch-8 Root Locusafride.binsaifNessuna valutazione finora
- Control Exp 8 Student ManualDocumento7 pagineControl Exp 8 Student ManualSyed Nahid Ahmed TopuNessuna valutazione finora
- Lecture 11Documento10 pagineLecture 11Milind BhatiaNessuna valutazione finora
- Effect of Axial Load Mode Shapes A N D Frequencies BeamsDocumento33 pagineEffect of Axial Load Mode Shapes A N D Frequencies BeamsYoyok SetyoNessuna valutazione finora
- What Is LightGBM, How To Implement It - How To Fine Tune The ParametersDocumento2 pagineWhat Is LightGBM, How To Implement It - How To Fine Tune The Parametersगोपाल शर्माNessuna valutazione finora
- 0606 s14 QP 22Documento16 pagine0606 s14 QP 22AKRAMNessuna valutazione finora
- Module 1: Computer Fundamentals 1.1 Introduction To Number System and CodesDocumento45 pagineModule 1: Computer Fundamentals 1.1 Introduction To Number System and CodesBachiNessuna valutazione finora
- EzIdentity MFA-TechnicalWriteupDocumento20 pagineEzIdentity MFA-TechnicalWriteupVikram SareenNessuna valutazione finora
- How To Be A Mathemagician PDFDocumento331 pagineHow To Be A Mathemagician PDFmadhav1967% (3)
- MethodsDocumento77 pagineMethodsZahirah ZairulNessuna valutazione finora
- Interpreting and Using Statistics in Psychological Research 1St Edition Christopher Test Bank Full Chapter PDFDocumento41 pagineInterpreting and Using Statistics in Psychological Research 1St Edition Christopher Test Bank Full Chapter PDFhungden8pne100% (12)
- Questions 16 and 17 Are Based On The FollowingDocumento2 pagineQuestions 16 and 17 Are Based On The FollowingkksNessuna valutazione finora
- Sample Question Paper - 1: Class - XDocumento12 pagineSample Question Paper - 1: Class - XABHISHEK VERMANessuna valutazione finora
- An Ontology-Based Context Model To Manage Users Preferences and ConflictsDocumento24 pagineAn Ontology-Based Context Model To Manage Users Preferences and ConflictsMaryam EddaibouniNessuna valutazione finora
- TCS2Documento5 pagineTCS2Harinath Yadav ChittiboyenaNessuna valutazione finora
- Course Notes MGT338 - Class 5Documento3 pagineCourse Notes MGT338 - Class 5Luciene20Nessuna valutazione finora
- Basic ProbDocumento12 pagineBasic ProbChaaaNessuna valutazione finora
- Computer Programming Assignment - 3Documento3 pagineComputer Programming Assignment - 3Waqas MehmoodNessuna valutazione finora
- 0216 GonzaDocumento8 pagine0216 GonzaSunil AundhekarNessuna valutazione finora
- Open Channel Flow Resistance - Ben Chie Yen - 2002 PDFDocumento20 pagineOpen Channel Flow Resistance - Ben Chie Yen - 2002 PDFAndres Granados100% (2)
- Electricity, Magnetism and Modern PhysicsDocumento12 pagineElectricity, Magnetism and Modern Physicsxtor787898Nessuna valutazione finora
- Profibus Manual EnglishDocumento87 pagineProfibus Manual Englishpecirepi0% (1)
- 7-Analisis Regresi Excel Notes - Stepwise RegressionDocumento6 pagine7-Analisis Regresi Excel Notes - Stepwise RegressionnandaekaNessuna valutazione finora
- Fluid Mechanics and Machinery - Lecture Notes, Study Material and Important Questions, AnswersDocumento3 pagineFluid Mechanics and Machinery - Lecture Notes, Study Material and Important Questions, AnswersM.V. TVNessuna valutazione finora
- Rish em 3490 Ss Manual Rev-C 1phDocumento7 pagineRish em 3490 Ss Manual Rev-C 1phpitambervermaNessuna valutazione finora
- Random Number GenerationDocumento13 pagineRandom Number GenerationSimarpreet Singh100% (1)
- (Semantic) - Word, Meaning and ConceptDocumento13 pagine(Semantic) - Word, Meaning and ConceptIan NugrahaNessuna valutazione finora
- Tu 5 Mechanics PDFDocumento4 pagineTu 5 Mechanics PDFJyotish VudikavalasaNessuna valutazione finora
- Chemguide Atom, MoleculeDocumento28 pagineChemguide Atom, MoleculeSabina SabaNessuna valutazione finora
- Summay Chapter 6 and 8 (Paul Goodwin and George Wright)Documento10 pagineSummay Chapter 6 and 8 (Paul Goodwin and George Wright)Zulkifli SaidNessuna valutazione finora
- Contemporary Business Mathematics Canadian 11th Edition Hummelbrunner Test Bank 1Documento63 pagineContemporary Business Mathematics Canadian 11th Edition Hummelbrunner Test Bank 1jonathan100% (39)
- Benchmarking in B.Tech Mechanical Program of MNIT and NITT (As Benchmarking Partner)Documento13 pagineBenchmarking in B.Tech Mechanical Program of MNIT and NITT (As Benchmarking Partner)Kartik ModiNessuna valutazione finora
- Calibration of SensorsDocumento5 pagineCalibration of SensorsSubhrajit MoharanaNessuna valutazione finora
- Summary and Interpretation of Reality TransurfingDa EverandSummary and Interpretation of Reality TransurfingValutazione: 5 su 5 stelle5/5 (5)
- Knocking on Heaven's Door: How Physics and Scientific Thinking Illuminate the Universe and the Modern WorldDa EverandKnocking on Heaven's Door: How Physics and Scientific Thinking Illuminate the Universe and the Modern WorldValutazione: 3.5 su 5 stelle3.5/5 (64)
- Dark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseDa EverandDark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseValutazione: 3.5 su 5 stelle3.5/5 (69)
- A Beginner's Guide to Constructing the Universe: The Mathematical Archetypes of Nature, Art, and ScienceDa EverandA Beginner's Guide to Constructing the Universe: The Mathematical Archetypes of Nature, Art, and ScienceValutazione: 4 su 5 stelle4/5 (51)
- Bedeviled: A Shadow History of Demons in ScienceDa EverandBedeviled: A Shadow History of Demons in ScienceValutazione: 5 su 5 stelle5/5 (5)
- Quantum Physics: What Everyone Needs to KnowDa EverandQuantum Physics: What Everyone Needs to KnowValutazione: 4.5 su 5 stelle4.5/5 (49)
- The End of Everything: (Astrophysically Speaking)Da EverandThe End of Everything: (Astrophysically Speaking)Valutazione: 4.5 su 5 stelle4.5/5 (157)
- A Natural History of Color: The Science Behind What We See and How We See itDa EverandA Natural History of Color: The Science Behind What We See and How We See itValutazione: 4 su 5 stelle4/5 (13)
- A Brief History of Time: From the Big Bang to Black HolesDa EverandA Brief History of Time: From the Big Bang to Black HolesValutazione: 4 su 5 stelle4/5 (2193)
- Midnight in Chernobyl: The Story of the World's Greatest Nuclear DisasterDa EverandMidnight in Chernobyl: The Story of the World's Greatest Nuclear DisasterValutazione: 4.5 su 5 stelle4.5/5 (410)
- Infinite Powers: How Calculus Reveals the Secrets of the UniverseDa EverandInfinite Powers: How Calculus Reveals the Secrets of the UniverseValutazione: 4.5 su 5 stelle4.5/5 (126)
- The Beginning of Infinity: Explanations That Transform the WorldDa EverandThe Beginning of Infinity: Explanations That Transform the WorldValutazione: 5 su 5 stelle5/5 (60)
- Quantum Spirituality: Science, Gnostic Mysticism, and Connecting with Source ConsciousnessDa EverandQuantum Spirituality: Science, Gnostic Mysticism, and Connecting with Source ConsciousnessValutazione: 4 su 5 stelle4/5 (6)
- Lost in Math: How Beauty Leads Physics AstrayDa EverandLost in Math: How Beauty Leads Physics AstrayValutazione: 4.5 su 5 stelle4.5/5 (125)
- Packing for Mars: The Curious Science of Life in the VoidDa EverandPacking for Mars: The Curious Science of Life in the VoidValutazione: 4 su 5 stelle4/5 (1396)
- Mastering Logical Fallacies: The Definitive Guide to Flawless Rhetoric and Bulletproof LogicDa EverandMastering Logical Fallacies: The Definitive Guide to Flawless Rhetoric and Bulletproof LogicValutazione: 4 su 5 stelle4/5 (91)
- The 60 Minute Quantum Physics Book: Science Made Easy For Beginners Without Math And In Plain Simple EnglishDa EverandThe 60 Minute Quantum Physics Book: Science Made Easy For Beginners Without Math And In Plain Simple EnglishValutazione: 4.5 su 5 stelle4.5/5 (4)
- The Magick of Physics: Uncovering the Fantastical Phenomena in Everyday LifeDa EverandThe Magick of Physics: Uncovering the Fantastical Phenomena in Everyday LifeNessuna valutazione finora
- The Power of Eight: Harnessing the Miraculous Energies of a Small Group to Heal Others, Your Life, and the WorldDa EverandThe Power of Eight: Harnessing the Miraculous Energies of a Small Group to Heal Others, Your Life, and the WorldValutazione: 4.5 su 5 stelle4.5/5 (54)
- Hyperspace: A Scientific Odyssey Through Parallel Universes, Time Warps, and the 10th DimensionDa EverandHyperspace: A Scientific Odyssey Through Parallel Universes, Time Warps, and the 10th DimensionValutazione: 4.5 su 5 stelle4.5/5 (3)
- The Tao of Physics: An Exploration of the Parallels between Modern Physics and Eastern MysticismDa EverandThe Tao of Physics: An Exploration of the Parallels between Modern Physics and Eastern MysticismValutazione: 4 su 5 stelle4/5 (500)