Potrebbero piacerti anche
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Bob Blue2 Ring TesterDocumento4 pagineBob Blue2 Ring Testerbybu74Nessuna valutazione finora
- EC3025NPDocumento2 pagineEC3025NPNguyen TrungNessuna valutazione finora
- 6ED10521MD000BA3 Datasheet enDocumento2 pagine6ED10521MD000BA3 Datasheet enGameR VanrenheitNessuna valutazione finora
- Research Paper GPS Based Voice Alert System For The BlindDocumento5 pagineResearch Paper GPS Based Voice Alert System For The BlindVenkata RatnamNessuna valutazione finora
- Mini Project SynopsisDocumento9 pagineMini Project SynopsisRohitNessuna valutazione finora
- Data Sheet MR-3Documento2 pagineData Sheet MR-3shlashmedNessuna valutazione finora
- Academic Handbook of MITDocumento170 pagineAcademic Handbook of MITVibhav PawarNessuna valutazione finora
- L&T PresentationDocumento124 pagineL&T Presentationrajib ranjan panda100% (1)
- h177 E5 C E5 C-T Digital Temperature Controller Datasheet en PDFDocumento138 pagineh177 E5 C E5 C-T Digital Temperature Controller Datasheet en PDFjohn rodriguezNessuna valutazione finora
- 3phase TSDDocumento114 pagine3phase TSDSridhar Chigati100% (3)
- QUESTION:Why in Computer 1024 Bytes Equals ToDocumento2 pagineQUESTION:Why in Computer 1024 Bytes Equals Toanadeem_87Nessuna valutazione finora
- IT2T3Documento3 pagineIT2T3Vyshnavi ThottempudiNessuna valutazione finora
- Airbus FAST60 PDFDocumento40 pagineAirbus FAST60 PDFrenjithaeroNessuna valutazione finora
- PG PC Oct NovDocumento21 paginePG PC Oct NovTan Kien HockNessuna valutazione finora
- Acer R3Documento102 pagineAcer R3shibilvNessuna valutazione finora
- Speed and Pothole DetectionDocumento15 pagineSpeed and Pothole DetectionShivansh BansalNessuna valutazione finora
- Continuous Time ConvolutionDocumento28 pagineContinuous Time ConvolutionlhslhinNessuna valutazione finora
- Digital Communications - Viva Voce QuestionsDocumento3 pagineDigital Communications - Viva Voce QuestionsAllanki Sanyasi Rao100% (1)
- SEMIKRON DataSheet SKiiP 03NAC12T4V1 25232540Documento5 pagineSEMIKRON DataSheet SKiiP 03NAC12T4V1 25232540salesiano05Nessuna valutazione finora
- VS Phontech Maritime Catalog 2020Documento96 pagineVS Phontech Maritime Catalog 2020Ehsan RohaniNessuna valutazione finora
- F40 Filmetrics SOP - REV DDocumento7 pagineF40 Filmetrics SOP - REV DsaranyaNessuna valutazione finora
- EdExcel A Level Chemistry Unit 1 Mark Scheme Results Paper 1 Jun 2005Documento10 pagineEdExcel A Level Chemistry Unit 1 Mark Scheme Results Paper 1 Jun 2005ProdhanNessuna valutazione finora
- Manual Tp-Link Access Point Lobby PDFDocumento24 pagineManual Tp-Link Access Point Lobby PDFvladkainNessuna valutazione finora
- Jupiter Pro ManualDocumento14 pagineJupiter Pro ManualBogdan CacuciNessuna valutazione finora
- BJT Cross ReferenceDocumento7 pagineBJT Cross ReferenceNoel BalugoNessuna valutazione finora
- AVT - Air Velocity TransmitterDocumento4 pagineAVT - Air Velocity Transmitternik amirulNessuna valutazione finora
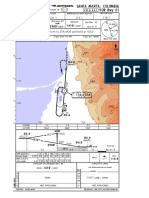
- Santa Marta, Colombia SKSM/SMR VOR Rwy 01: 13-1 119.1 118.7 VOR Cat A, B & C Simon Bolivar Intl 125.0 127.7Documento1 paginaSanta Marta, Colombia SKSM/SMR VOR Rwy 01: 13-1 119.1 118.7 VOR Cat A, B & C Simon Bolivar Intl 125.0 127.7Guillermo Serrano KelcyNessuna valutazione finora
- How Did Bill Gates and Steve Jobs Differ in Their Leadership StyleDocumento4 pagineHow Did Bill Gates and Steve Jobs Differ in Their Leadership StyleDip Kumar Dey67% (9)
- Monitoring of Shaft Voltage and Shaft Grounding Current - Beth Galano (MPS)Documento46 pagineMonitoring of Shaft Voltage and Shaft Grounding Current - Beth Galano (MPS)Jose PradoNessuna valutazione finora
- Indesit Idce745euDocumento13 pagineIndesit Idce745euMилош ЛукићNessuna valutazione finora