Potrebbero piacerti anche
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Da EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Nessuna valutazione finora
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Da EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Valutazione: 2.5 su 5 stelle2.5/5 (3)
- Pic PWMDocumento9 paginePic PWMAditya Gannamaraju100% (1)
- Projects With Microcontrollers And PICCDa EverandProjects With Microcontrollers And PICCValutazione: 5 su 5 stelle5/5 (1)
- Timer Programing of Atmega32Documento8 pagineTimer Programing of Atmega32Stephanie Flores100% (1)
- Sine Wave Generation and Implementation Using DsPIC33FJDocumento27 pagineSine Wave Generation and Implementation Using DsPIC33FJpaaraib100% (1)
- RTS Noise Impact in CMOS Image Sensors Readout CircuitDocumento5 pagineRTS Noise Impact in CMOS Image Sensors Readout CircuiturpublicNessuna valutazione finora
- IR TachometerDocumento10 pagineIR TachometerMohammed Abdulrahman MossaNessuna valutazione finora
- Experiment 6: Motor Speed Control: ErratumDocumento5 pagineExperiment 6: Motor Speed Control: ErratumBambang PrasetyoNessuna valutazione finora
- 16-B PWM U O - C T Relevant Devices: IT Sing AN N HIP ImerDocumento12 pagine16-B PWM U O - C T Relevant Devices: IT Sing AN N HIP ImerLauderi MartinsNessuna valutazione finora
- ProjectDocumento25 pagineProject9897856218Nessuna valutazione finora
- CPR E 381x/382x Lab11aDocumento10 pagineCPR E 381x/382x Lab11aHelenNessuna valutazione finora
- Interfacing Programs For 8085Documento37 pagineInterfacing Programs For 8085archankumarturagaNessuna valutazione finora
- M4 Micro OneNoteDocumento6 pagineM4 Micro OneNoteAryan RaiNessuna valutazione finora
- Tty To Rs232Documento8 pagineTty To Rs232sandeepverma8257100% (2)
- DC Motor Speed ControlDocumento5 pagineDC Motor Speed ControlAnita WulansariNessuna valutazione finora
- PWM ControlDocumento28 paginePWM ControlAgus Lesmana100% (2)
- 10 PWMDocumento6 pagine10 PWMMikroc Thupati SrinivsNessuna valutazione finora
- PWM Signal Generators: Testing Status: Mixed. Some Untested, Some SPICE SimulatedDocumento15 paginePWM Signal Generators: Testing Status: Mixed. Some Untested, Some SPICE SimulatedSivareddy MudiyalaNessuna valutazione finora
- Basics of InvertersDocumento12 pagineBasics of InvertersTatenda BizureNessuna valutazione finora
- PWM Signal GeneratorsDocumento3 paginePWM Signal GeneratorsjalalhNessuna valutazione finora
- ECE 5570 - Lab 8: Brushless DC Motor Control With 6-Step CommutationDocumento6 pagineECE 5570 - Lab 8: Brushless DC Motor Control With 6-Step CommutationAnimesh GhoshNessuna valutazione finora
- Project Underdamped SystemDocumento6 pagineProject Underdamped SystemPablo HenriqueNessuna valutazione finora
- CISE 204 Digital System Design Lab Manual PDFDocumento44 pagineCISE 204 Digital System Design Lab Manual PDFEng-Mohammed KayedNessuna valutazione finora
- Sensors and Sensing Lab 1: Arduino Motor Control and ROSDocumento7 pagineSensors and Sensing Lab 1: Arduino Motor Control and ROSFebri Rizky PratamaNessuna valutazione finora
- The 555 Timer Circuit IIDocumento15 pagineThe 555 Timer Circuit IIDeshitha Chamikara WickramarathnaNessuna valutazione finora
- Siren Project With Pic MicrocontrollerDocumento12 pagineSiren Project With Pic MicrocontrollerMatthew Hunter100% (1)
- PLC AutomationDocumento13 paginePLC AutomationVamsi KumarNessuna valutazione finora
- Raewwwwwwwwwwwwwwwwwwwwwwwww: RUNG - A Section of The PLC Ladder Program That Terminates in An OutputDocumento6 pagineRaewwwwwwwwwwwwwwwwwwwwwwwww: RUNG - A Section of The PLC Ladder Program That Terminates in An Outputpatil_555Nessuna valutazione finora
- Hobby Servo Motor Control Via PIC Pulse Width Modulation: Nathan Markey April 4, 2003Documento7 pagineHobby Servo Motor Control Via PIC Pulse Width Modulation: Nathan Markey April 4, 2003Luciana Gutierrez Salazar100% (1)
- Objective:: Lab TasksDocumento9 pagineObjective:: Lab TasksAsit44 gleNessuna valutazione finora
- Traffic Light Control System ProjectDocumento12 pagineTraffic Light Control System ProjectVinay ReddyNessuna valutazione finora
- Setup and Use The AVR® TimersDocumento16 pagineSetup and Use The AVR® Timersmike_helplineNessuna valutazione finora
- Motor Tachometer Speed Calculation Using Hardware Timer Capture FeatureDocumento3 pagineMotor Tachometer Speed Calculation Using Hardware Timer Capture Featureaani13Nessuna valutazione finora
- 99 000 RPM Contact Less Digital TachometerDocumento11 pagine99 000 RPM Contact Less Digital TachometerHemanth Kumar K SNessuna valutazione finora
- Microcontroller Tutorial Ii Timers: What Is A Timer?Documento13 pagineMicrocontroller Tutorial Ii Timers: What Is A Timer?Ting Chee SiongNessuna valutazione finora
- Openloop Motor ModelingDocumento16 pagineOpenloop Motor ModelingUmair RazaNessuna valutazione finora
- ATMPWMDocumento6 pagineATMPWMOkiPetrus Hutauruk LumbanBaringinNessuna valutazione finora
- 4 - 1 Arduino Basic Functions - 1Documento7 pagine4 - 1 Arduino Basic Functions - 1ankita81123singhNessuna valutazione finora
- BER MeterDocumento8 pagineBER Metersakti prasad nandaNessuna valutazione finora
- Automatic College Bell REPORTDocumento34 pagineAutomatic College Bell REPORTNagraj Tondchore50% (2)
- Transient AnalysisDocumento46 pagineTransient AnalysisArryshah DahmiaNessuna valutazione finora
- PWM, A Software Solution For The PIC16CXXX: MethodsDocumento14 paginePWM, A Software Solution For The PIC16CXXX: Methodsjavixl1Nessuna valutazione finora
- University of Essex: School of Computer Science andDocumento18 pagineUniversity of Essex: School of Computer Science andVlad SimizeanuNessuna valutazione finora
- Newbie's Guide To AVR Timers: Dean CameraDocumento27 pagineNewbie's Guide To AVR Timers: Dean CameracoraztoNessuna valutazione finora
- Microchip-Introduction To Capacitive SensingDocumento10 pagineMicrochip-Introduction To Capacitive Sensinghoe3852Nessuna valutazione finora
- Ee446 Embedded Systems Lab #01: InstructionsDocumento4 pagineEe446 Embedded Systems Lab #01: InstructionsMuhammad ShafeeqNessuna valutazione finora
- Session 4Documento2 pagineSession 4Manoj GudiNessuna valutazione finora
- Using PWM With Code WarriorDocumento14 pagineUsing PWM With Code WarriorGowrishankar Gupta100% (1)
- Modul 3. Timer & CounterDocumento6 pagineModul 3. Timer & CounterYohana Crisma LimbongNessuna valutazione finora
- Modul 3. Timer & Counter 1. TujuanDocumento6 pagineModul 3. Timer & Counter 1. TujuanYohana Crisma LimbongNessuna valutazione finora
- Ac Voltage Controller Using Thyristor Project Report by SandeepDocumento29 pagineAc Voltage Controller Using Thyristor Project Report by SandeepSANDEEP DHANDA100% (1)
- Texas A&M VCO Lab: CMOS LC Oscillator Analysis & SimulationDocumento8 pagineTexas A&M VCO Lab: CMOS LC Oscillator Analysis & SimulationRekha YadavNessuna valutazione finora
- An Freq MeasurementDocumento14 pagineAn Freq MeasurementfarcasiunNessuna valutazione finora
- Microcontrollers LabDocumento19 pagineMicrocontrollers LabAMARNATHNAIDU77Nessuna valutazione finora
- PWM With Microcontroller 8051 For SCR or Triac Power ControlDocumento8 paginePWM With Microcontroller 8051 For SCR or Triac Power ControlSyedMahinNessuna valutazione finora
- EXP6Documento10 pagineEXP6fatih_ealNessuna valutazione finora
- 1 41552 PDFDocumento16 pagine1 41552 PDFGaurang 'TottaPhilic' GuptaNessuna valutazione finora
- Real Turbojet Engine Cycle AnalysisDocumento1 paginaReal Turbojet Engine Cycle AnalysisGaurang 'TottaPhilic' GuptaNessuna valutazione finora
- Turbojet With After BurnerDocumento1 paginaTurbojet With After BurnerGaurang 'TottaPhilic' GuptaNessuna valutazione finora
- Basic Concepts of ChemistryDocumento25 pagineBasic Concepts of ChemistrySanchit JainNessuna valutazione finora
- TurbofanDocumento2 pagineTurbofanGaurang 'TottaPhilic' GuptaNessuna valutazione finora
- Matching A Propeller To A MotorDocumento5 pagineMatching A Propeller To A MotorGaurang 'TottaPhilic' GuptaNessuna valutazione finora
- Aerodynamics For Students - BladeDocumento6 pagineAerodynamics For Students - BladeGaurang 'TottaPhilic' GuptaNessuna valutazione finora
- Fundamentals of Small Unmanned Aircraft Flight-BartonDocumento18 pagineFundamentals of Small Unmanned Aircraft Flight-BartonGaurang 'TottaPhilic' Gupta100% (1)
- Attitude Estimation With Accelerometers and Gyros Using Fuzzy Tuned Kalman FilterDocumento6 pagineAttitude Estimation With Accelerometers and Gyros Using Fuzzy Tuned Kalman FilterĐinh Hữu KiênNessuna valutazione finora
- Flight Power Relations: Lab 1 Lecture NotesDocumento4 pagineFlight Power Relations: Lab 1 Lecture NotesGaurang 'TottaPhilic' GuptaNessuna valutazione finora
- Kuhn - Working Charts For The Determination of The Lift Distribution Between Biplane Wings - NACADocumento15 pagineKuhn - Working Charts For The Determination of The Lift Distribution Between Biplane Wings - NACAfedeoseayoNessuna valutazione finora
- Preview of "Microsoft Word - IITB - Abstract - Docx"Documento14 paginePreview of "Microsoft Word - IITB - Abstract - Docx"Gaurang 'TottaPhilic' GuptaNessuna valutazione finora
- Economic Analysis of Aircraft DesignDocumento21 pagineEconomic Analysis of Aircraft DesignGaurang 'TottaPhilic' GuptaNessuna valutazione finora
- AeroDocumento6 pagineAeroGaurang 'TottaPhilic' GuptaNessuna valutazione finora
- Major Project - Grid Solving RobotDocumento84 pagineMajor Project - Grid Solving RobotAshish Bharade57% (7)
- Twist Distribution For Swept WingDocumento13 pagineTwist Distribution For Swept WingGaurang 'TottaPhilic' GuptaNessuna valutazione finora
- Concept of Lift and DragDocumento7 pagineConcept of Lift and DraglarasmoyoNessuna valutazione finora
- IEEMA June 2020 - Generator 95% Stator Earth Fault and Its CalculationDocumento5 pagineIEEMA June 2020 - Generator 95% Stator Earth Fault and Its CalculationVishal Kumar LaddhaNessuna valutazione finora
- Objective: Parkavi RDocumento3 pagineObjective: Parkavi Rparkavi02Nessuna valutazione finora
- 3 BR 2565 JFDocumento36 pagine3 BR 2565 JFMindSet MarcosNessuna valutazione finora
- Seventy Years of Getting Transistorized 2017Documento5 pagineSeventy Years of Getting Transistorized 2017RajatNessuna valutazione finora
- 20 KW Water-Cooled Prototype of A Buck-Boost Bidirectional DC-DC Converter Topology For Electrical Vehicle Motor DrivesDocumento6 pagine20 KW Water-Cooled Prototype of A Buck-Boost Bidirectional DC-DC Converter Topology For Electrical Vehicle Motor DrivesEnes UğurNessuna valutazione finora
- 8th Sem ProjectDocumento29 pagine8th Sem ProjectRashmi B ReddyNessuna valutazione finora
- TDR900 QuickStartGuide PDFDocumento2 pagineTDR900 QuickStartGuide PDFmiamor$44Nessuna valutazione finora
- AVR-051 User Manual: Monicon International Co., LTD AVR-051Documento10 pagineAVR-051 User Manual: Monicon International Co., LTD AVR-051GONZALONessuna valutazione finora
- Color Television/ Video Cassette Recorder: Service ManualDocumento61 pagineColor Television/ Video Cassette Recorder: Service Manualomaderas1Nessuna valutazione finora
- MC33385 - Atm36bDocumento11 pagineMC33385 - Atm36btason07Nessuna valutazione finora
- Serial Communication: User's Manual QJ71C24N, QJ71C24N-R2 QJ71C24N-R4 QJ71C24, QJ71C24-R2Documento24 pagineSerial Communication: User's Manual QJ71C24N, QJ71C24N-R2 QJ71C24N-R4 QJ71C24, QJ71C24-R2Ing Capriel CaprielNessuna valutazione finora
- Power Quality Monitoring For Electrical Power Systems: Sentron Pac4200Documento4 paginePower Quality Monitoring For Electrical Power Systems: Sentron Pac4200Omar Alfredo Del Castillo QuispeNessuna valutazione finora
- DMR-EX89 Service ManualDocumento96 pagineDMR-EX89 Service ManualEmjay111100% (1)
- 2.1.1.5 Lab The World Runs On Circuits (ACT1FINAL)Documento3 pagine2.1.1.5 Lab The World Runs On Circuits (ACT1FINAL)Rhoda ObiasNessuna valutazione finora
- 04 Telephone DiagnosticsDocumento19 pagine04 Telephone DiagnosticsSalisburNessuna valutazione finora
- Monitoring of Electrical System Using Internet of Things With Smart Current Electric SensorsDocumento8 pagineMonitoring of Electrical System Using Internet of Things With Smart Current Electric SensorsMarcela VelasteguíNessuna valutazione finora
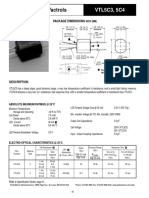
- Low Cost Axial Vactrols: VTL5C3, 5C4Documento2 pagineLow Cost Axial Vactrols: VTL5C3, 5C4sillyNessuna valutazione finora
- Corporate TimelineDocumento28 pagineCorporate TimelineMikael VelschowNessuna valutazione finora
- Jntu Kak 2 2 Ece Emtl Set 3Documento6 pagineJntu Kak 2 2 Ece Emtl Set 3himeshemraanNessuna valutazione finora
- Introduction to PIC Microcontrollers Architecture and Instruction SetDocumento41 pagineIntroduction to PIC Microcontrollers Architecture and Instruction SethulavanyaNessuna valutazione finora
- AXP288Documento3 pagineAXP288Jungkook JeonNessuna valutazione finora
- Honeywell S7830 SpecDocumento16 pagineHoneywell S7830 SpecAndres ParedesNessuna valutazione finora
- COA Unit 1 Lecture 4Documento35 pagineCOA Unit 1 Lecture 4Pratibha SNessuna valutazione finora
- How Does Radio Waves Works in Radio BroadcastingDocumento2 pagineHow Does Radio Waves Works in Radio BroadcastingFahmi DimacalingNessuna valutazione finora
- 8086 Microprocessor ArchitectureDocumento3 pagine8086 Microprocessor ArchitecturePavan KumarNessuna valutazione finora
- Flexi Released Configurations v4.3Documento76 pagineFlexi Released Configurations v4.3GabrieleNessuna valutazione finora
- PDF - 2956 - DIV08L1A-2419 v1.1Documento3 paginePDF - 2956 - DIV08L1A-2419 v1.1aboediartoNessuna valutazione finora
- AC9 User GuideDocumento124 pagineAC9 User GuideDaniel IsailaNessuna valutazione finora
- Ch08-Image CompressionDocumento38 pagineCh08-Image Compressionbaigsalman251Nessuna valutazione finora