Potrebbero piacerti anche
- Introduction Static ForceDocumento35 pagineIntroduction Static ForceSurya VenkatramanNessuna valutazione finora
- Study Package On Newtons Law of MotionDocumento59 pagineStudy Package On Newtons Law of MotionApex Institute67% (3)
- The Laws of Motion StaticsDocumento12 pagineThe Laws of Motion StaticsJoegeNessuna valutazione finora
- Statics - Force SystemDocumento4 pagineStatics - Force SystemReynald RenzNessuna valutazione finora
- DomDocumento151 pagineDomvenkateshyadav2116Nessuna valutazione finora
- Mech223 - Unit 1 and 2 Lecture CompilationDocumento17 pagineMech223 - Unit 1 and 2 Lecture CompilationVanessa LuceroNessuna valutazione finora
- Study Material Force & Laws of Motion For AIEEEDocumento46 pagineStudy Material Force & Laws of Motion For AIEEEApex Institute100% (1)
- Assignment 1Documento5 pagineAssignment 1qmjcmarquezNessuna valutazione finora
- 10-10 Static Equilibrium: Answer To Essential Question 10.9: A Familiar Example Is A Figure Skater Who Spins RelativelyDocumento2 pagine10-10 Static Equilibrium: Answer To Essential Question 10.9: A Familiar Example Is A Figure Skater Who Spins RelativelyAtul SharmaNessuna valutazione finora
- Engg. MechanicsDocumento29 pagineEngg. MechanicsSunand Pongurlekar100% (1)
- Engineering Statics: Quaid-e-Azam College of Engineering & TechnologyDocumento19 pagineEngineering Statics: Quaid-e-Azam College of Engineering & TechnologywaseemjuttNessuna valutazione finora
- Unit-1 One MarksDocumento6 pagineUnit-1 One MarksShri RahulNessuna valutazione finora
- Lectures 1&2 Review of The Three Laws of Motion and Vector AlgebraDocumento14 pagineLectures 1&2 Review of The Three Laws of Motion and Vector AlgebraSathiyaseelan SubramaniNessuna valutazione finora
- Practical No-1 (Reaction of Beam)Documento15 paginePractical No-1 (Reaction of Beam)Akash GolwalkarNessuna valutazione finora
- Two Marks Question Bank Unit-I Basics and Statics of ParticlesDocumento5 pagineTwo Marks Question Bank Unit-I Basics and Statics of ParticlesSiva VadeNessuna valutazione finora
- Engineering Mechanics - Lecture Note 1Documento33 pagineEngineering Mechanics - Lecture Note 1Tanu RdNessuna valutazione finora
- Week 10 KineticsDocumento24 pagineWeek 10 Kineticsiwhy_Nessuna valutazione finora
- Mechanics Lab1Documento7 pagineMechanics Lab1yogendra kumarNessuna valutazione finora
- Engineering Mechanics: Dr. T.Meena, Associate Professor, Structural and Geotechnical Division, SMBS, Vit, VelloreDocumento36 pagineEngineering Mechanics: Dr. T.Meena, Associate Professor, Structural and Geotechnical Division, SMBS, Vit, VelloreSiva ChandhiranNessuna valutazione finora
- General Physics I Essay by Farid MammadovDocumento24 pagineGeneral Physics I Essay by Farid MammadovФарид МамедовNessuna valutazione finora
- Unit-1 FMEDocumento59 pagineUnit-1 FMEAshish KhariNessuna valutazione finora
- تقرير الميكانيكDocumento11 pagineتقرير الميكانيكfatiman333333Nessuna valutazione finora
- Newton's Laws0Documento74 pagineNewton's Laws0K.s. BalajiNessuna valutazione finora
- Engineering Statics: Quaid-e-Azam College of Engineering & TechnologyDocumento19 pagineEngineering Statics: Quaid-e-Azam College of Engineering & TechnologyaliNessuna valutazione finora
- Assignment StaticDocumento24 pagineAssignment StaticSuhayl AzminNessuna valutazione finora
- NLM UnacademyDocumento45 pagineNLM UnacademyMusical DJNessuna valutazione finora
- DynamicsDocumento26 pagineDynamicschimdesa TolesaNessuna valutazione finora
- Statics of Rigid BodiesDocumento14 pagineStatics of Rigid BodiesMariya MariyaNessuna valutazione finora
- Rotational Motion 3: Physics 53Documento10 pagineRotational Motion 3: Physics 53Kriti SrivastavaNessuna valutazione finora
- 19ges28 - Engineering Mechanics: DR S.Sudhagar M.E., PHDDocumento71 pagine19ges28 - Engineering Mechanics: DR S.Sudhagar M.E., PHDVanHieu LuyenNessuna valutazione finora
- Chapter 1 - Force Systems - Part ADocumento14 pagineChapter 1 - Force Systems - Part ACheong JkNessuna valutazione finora
- Statics Note Dawit's PDFDocumento59 pagineStatics Note Dawit's PDFDawit GebrehanaNessuna valutazione finora
- Newton's Laws of MotionDocumento13 pagineNewton's Laws of MotionChinmay SharmaNessuna valutazione finora
- Structural Analysis For Architect NotesDocumento82 pagineStructural Analysis For Architect NotesALAWI SSEKUBUNGANessuna valutazione finora
- Dynamics Summary NotesDocumento7 pagineDynamics Summary NotesArlo SeasenNessuna valutazione finora
- Lecture 3 Particle Kinetics OKDocumento48 pagineLecture 3 Particle Kinetics OKTất ThànhNessuna valutazione finora
- System of Particles and Rotational MotionDocumento12 pagineSystem of Particles and Rotational MotionMâñøj Thę ŠtrįkėrNessuna valutazione finora
- Mechanics PortionDocumento55 pagineMechanics PortionRupak MandalNessuna valutazione finora
- Mechanical VibrationDocumento72 pagineMechanical VibrationMuhammadNasir100% (1)
- Engineering Mechanics: Rusul Khalid Polymer and Petrochemical EngineeringDocumento18 pagineEngineering Mechanics: Rusul Khalid Polymer and Petrochemical EngineeringAli aliraqiNessuna valutazione finora
- Addis Ababa University Faculty of Technology Department of Civil EngineeringDocumento63 pagineAddis Ababa University Faculty of Technology Department of Civil EngineeringZi BogaleNessuna valutazione finora
- Principles of DynamicsDocumento7 paginePrinciples of DynamicsNhezlee AlegreNessuna valutazione finora
- 1 IntroductionDocumento19 pagine1 Introductionmsi appleNessuna valutazione finora
- Physics CH - 3Documento49 paginePhysics CH - 3Prasanna VijayakumarNessuna valutazione finora
- Principles of Statics and Resultants of Force Systems: Niversity of Outheastern HilippinesDocumento34 paginePrinciples of Statics and Resultants of Force Systems: Niversity of Outheastern HilippinesDaniella SabacNessuna valutazione finora
- EquilibriumDocumento40 pagineEquilibriumJeremy MacalaladNessuna valutazione finora
- نموذج1Documento11 pagineنموذج1kikk59967Nessuna valutazione finora
- Further MechanicsDocumento11 pagineFurther MechanicsBecky TenneyNessuna valutazione finora
- عملي ميكانيك ملخص هندسة بناء مرحله اولىDocumento11 pagineعملي ميكانيك ملخص هندسة بناء مرحله اولىمنتظر محمدNessuna valutazione finora
- EMECH 2 MarksDocumento18 pagineEMECH 2 MarkspavanraneNessuna valutazione finora
- Unit-1&2 Engineering MechanicsDocumento15 pagineUnit-1&2 Engineering MechanicsVaidyanathan RamakrishnanNessuna valutazione finora
- EM Chapter 1Documento15 pagineEM Chapter 1Mahesh BahadareNessuna valutazione finora
- New Module 1 MechanicsDocumento23 pagineNew Module 1 MechanicsGARAY, EUGENIONessuna valutazione finora
- GE6253 - 2 Mark Question Engineering MechanicsDocumento6 pagineGE6253 - 2 Mark Question Engineering MechanicsstkrNessuna valutazione finora
- 3RD Year Es1 NotesDocumento9 pagine3RD Year Es1 NotesMiguel MarcoNessuna valutazione finora
- Full Free Motion of Celestial Bodies Around a Central Mass - Why Do They Mostly Orbit in the Equatorial Plane?Da EverandFull Free Motion of Celestial Bodies Around a Central Mass - Why Do They Mostly Orbit in the Equatorial Plane?Nessuna valutazione finora
- Past Simple or Past ContinuousDocumento3 paginePast Simple or Past ContinuousMarta BenciniNessuna valutazione finora
- I Usually Visit To Mall Del Sol Shopping CentreDocumento1 paginaI Usually Visit To Mall Del Sol Shopping CentreRichard VillónNessuna valutazione finora
- Mat Ing EXAMEN 2 V1Documento8 pagineMat Ing EXAMEN 2 V1Richard VillónNessuna valutazione finora
- Ijest Vol1 No1 pp.1 15Documento15 pagineIjest Vol1 No1 pp.1 15prabhjot singh1Nessuna valutazione finora
- Cable To Steel or Cast Iron, Cathodic: W Ca XX X XX LH XX L MDocumento2 pagineCable To Steel or Cast Iron, Cathodic: W Ca XX X XX LH XX L MRichard VillónNessuna valutazione finora
- ConversionDocumento1 paginaConversionCosmin CinciNessuna valutazione finora
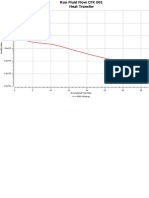
- Proyecto Transferencia de Calor 2Documento1 paginaProyecto Transferencia de Calor 2Michael WhitakerNessuna valutazione finora
- Curva de CalorDocumento1 paginaCurva de CalorBrandon CaldwellNessuna valutazione finora
- Proyecto de TransferenciaDocumento1 paginaProyecto de TransferenciaRichard VillónNessuna valutazione finora
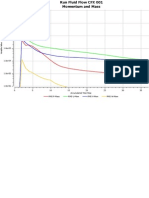
- Momemtum and Mass ResidualDocumento1 paginaMomemtum and Mass ResidualMichael WhitakerNessuna valutazione finora
- C03 P001 P010Documento10 pagineC03 P001 P010何凱翔Nessuna valutazione finora
- Infinitivo y GerundioDocumento3 pagineInfinitivo y GerundioRichard VillónNessuna valutazione finora
- Tabla NormalDocumento1 paginaTabla NormalRichard VillónNessuna valutazione finora