Potrebbero piacerti anche
- Redes - Levantamento Sobre Interface CAN Na Industria AutomobilísticaDocumento12 pagineRedes - Levantamento Sobre Interface CAN Na Industria AutomobilísticaMarcelo C. OliveiraNessuna valutazione finora
- Projeto Rede CAN em Maquinas AgricolasDocumento8 pagineProjeto Rede CAN em Maquinas AgricolasGabrielle ResendeNessuna valutazione finora
- Protoco CanDocumento24 pagineProtoco CanThiago MelloNessuna valutazione finora
- Man - JUST G3 PDFDocumento12 pagineMan - JUST G3 PDFLuiz MelgesNessuna valutazione finora
- Viscosidades Dos Lubrificantes PDFDocumento9 pagineViscosidades Dos Lubrificantes PDFMarcelo Cardozo100% (1)
- Manual de reparos MT-X 14-18mDocumento240 pagineManual de reparos MT-X 14-18mRafael MendesNessuna valutazione finora
- MTE Catalogo Injecao Eletronica Resumo 2017Documento40 pagineMTE Catalogo Injecao Eletronica Resumo 2017vrjrNessuna valutazione finora
- Estudo Dos Protocolos de Comunicacao Das Arquiteturas EletroeletronicasDocumento97 pagineEstudo Dos Protocolos de Comunicacao Das Arquiteturas EletroeletronicasDiogov32Nessuna valutazione finora
- Manual de Injecao VW Simos 4sDocumento44 pagineManual de Injecao VW Simos 4sIgor Wandel Rei SantosNessuna valutazione finora
- Programação de Microcontroladores PIC em BASIC para Iniciantes Utilizando o Proton IDE PDFDocumento53 pagineProgramação de Microcontroladores PIC em BASIC para Iniciantes Utilizando o Proton IDE PDFÉderson Aleandro Dos SantosNessuna valutazione finora
- Catalogo Bosch Sensor de Abs 2019Documento23 pagineCatalogo Bosch Sensor de Abs 2019Johelton100% (1)
- Manual RastreadorDocumento10 pagineManual RastreadorsotheroNessuna valutazione finora
- Eletrônica EmbarcadaDocumento1 paginaEletrônica EmbarcadaInvandersNessuna valutazione finora
- Catálogo de produtos de tecnologia eletrônica automotivaDocumento22 pagineCatálogo de produtos de tecnologia eletrônica automotivasergiodtmNessuna valutazione finora
- Manual Do Proprietario 2020 2021Documento172 pagineManual Do Proprietario 2020 2021Luiz Mariano Baumel SzczypiorNessuna valutazione finora
- CT DAMEC 2019 2s 33Documento112 pagineCT DAMEC 2019 2s 33marcossoaresdesouzaNessuna valutazione finora
- Mini Carregadeira L220 NEWDocumento24 pagineMini Carregadeira L220 NEWLineker Deleon LD ConsultoriaNessuna valutazione finora
- Calibração de injetores em máquinas CaterpillarDocumento2 pagineCalibração de injetores em máquinas Caterpillartom souzaNessuna valutazione finora
- Chicote Pronto FT450-FT550Documento24 pagineChicote Pronto FT450-FT550Daniel Pastorello100% (1)
- 910040-00 REV01 MANUAL TBB 3kVADocumento22 pagine910040-00 REV01 MANUAL TBB 3kVAwallaceleal07Nessuna valutazione finora
- Motor falhando Voyage 1.6 resolvidoDocumento7 pagineMotor falhando Voyage 1.6 resolvidoForteLubNessuna valutazione finora
- Alternadores para diversos veículosDocumento6 pagineAlternadores para diversos veículosAnunciação DivinoNessuna valutazione finora
- Retificador solda eletrodos revestidos manual peçasDocumento16 pagineRetificador solda eletrodos revestidos manual peçasMarcelo Nunes100% (2)
- 07 - Eletronica Embarcada MotoresDocumento24 pagine07 - Eletronica Embarcada MotoresJeferson SantosNessuna valutazione finora
- Manual Da RoçadeiraDocumento12 pagineManual Da RoçadeiraIrineu Muniz BezerraNessuna valutazione finora
- Guia localização número série Topcon equipamentosDocumento5 pagineGuia localização número série Topcon equipamentosDaniel zanelattoNessuna valutazione finora
- MXT-140 ManualDocumento31 pagineMXT-140 ManualemarquescNessuna valutazione finora
- Guia completo para instalação e configuração de injeção eletrônica Power InjectDocumento103 pagineGuia completo para instalação e configuração de injeção eletrônica Power InjectAirton Gm GmNessuna valutazione finora
- ScaneDocumento30 pagineScaneFrancisco OliveiraNessuna valutazione finora
- Códigos de Falhas para Diagnóstico VeicularDocumento20 pagineCódigos de Falhas para Diagnóstico VeicularJonas Rachid100% (1)
- Recuperação de códigos de falha da transmissão Volvo S-850Documento4 pagineRecuperação de códigos de falha da transmissão Volvo S-850carlinhocxscambioNessuna valutazione finora
- SQA Perfil de Qualidade Bosch Car ServiceDocumento48 pagineSQA Perfil de Qualidade Bosch Car ServicerobinsoneletricistaNessuna valutazione finora
- Guia completo para manutenção e solução de problemas do gerador B4T-2500Documento34 pagineGuia completo para manutenção e solução de problemas do gerador B4T-2500AmandaNessuna valutazione finora
- 8FG 1.8 A 3.0 ToneladasDocumento2 pagine8FG 1.8 A 3.0 ToneladasTiagoNessuna valutazione finora
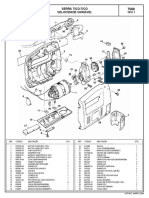
- Serra Tico-Tico Velocidade Variável: Tipo 1Documento1 paginaSerra Tico-Tico Velocidade Variável: Tipo 1Oficina Motta EletrodomesticosNessuna valutazione finora
- Codigo de Erros Froniu SymoDocumento82 pagineCodigo de Erros Froniu SymoitaneroliveiraNessuna valutazione finora
- 2 CX220Documento103 pagine2 CX220Mauricio CalixtoNessuna valutazione finora
- Ar condicionado automático: resolução de problemas e especificações de serviçoDocumento88 pagineAr condicionado automático: resolução de problemas e especificações de serviçoFabiano MendesNessuna valutazione finora
- 2 Motor Diesel em VDocumento128 pagine2 Motor Diesel em VSaraiva EquipamentosNessuna valutazione finora
- CFMoto 625Documento201 pagineCFMoto 625fastoreldaNessuna valutazione finora
- MIni Pá Carregadeira NEW HOLLAND L320Documento62 pagineMIni Pá Carregadeira NEW HOLLAND L320Golliraz100% (1)
- L120D Carregadeira de Rodas VolvoDocumento6 pagineL120D Carregadeira de Rodas VolvoVinícius FocaNessuna valutazione finora
- E175b Manual de Servportugues-ProvaDocumento836 pagineE175b Manual de Servportugues-ProvaEverton MPNessuna valutazione finora
- Manual Montana 2013Documento230 pagineManual Montana 2013TobiasNessuna valutazione finora
- 100.644 Edge-30+ Guia de Usuário PTDocumento86 pagine100.644 Edge-30+ Guia de Usuário PTMaycon RafaelNessuna valutazione finora
- Catalogo Grud 2017 Finalziado PDFDocumento12 pagineCatalogo Grud 2017 Finalziado PDFWillyan SouzaNessuna valutazione finora
- Extrusoras de concreto IMBDocumento48 pagineExtrusoras de concreto IMBTen VieiraNessuna valutazione finora
- Manual de Body Computer - Fiat VENICEDocumento52 pagineManual de Body Computer - Fiat VENICECaio FelipeNessuna valutazione finora
- Jeep Renegade DTC P0089Documento2 pagineJeep Renegade DTC P0089RodrigoNessuna valutazione finora
- Diagnóstico de Falhas No Sistema de Comunicação Entre Módulos Através Do Conector DLC - Jornal Oficina Brasil - Consultor OBDocumento17 pagineDiagnóstico de Falhas No Sistema de Comunicação Entre Módulos Através Do Conector DLC - Jornal Oficina Brasil - Consultor OBoidualc45Nessuna valutazione finora
- Manual 526 PortDocumento43 pagineManual 526 PortROSEMARIO PORFIRIONessuna valutazione finora
- Wa320-5 Operação e ManutençãoDocumento253 pagineWa320-5 Operação e ManutençãoArmando FelixNessuna valutazione finora
- Audi e Alfa Romeo tabela de aplicação motores e sistemasDocumento103 pagineAudi e Alfa Romeo tabela de aplicação motores e sistemasRicardoNessuna valutazione finora
- Relatório FinalDocumento18 pagineRelatório FinalRicardo Oliveira100% (1)
- Apostila Escavadeira HidraulicaDocumento102 pagineApostila Escavadeira HidraulicaMjs TreinamentosNessuna valutazione finora
- Como funcionam os carregadores de bateriaDocumento14 pagineComo funcionam os carregadores de bateriaAlex SandroNessuna valutazione finora
- Diagnóstico e solução de problemas da rede CAN-BUSDocumento88 pagineDiagnóstico e solução de problemas da rede CAN-BUSrodrigoNessuna valutazione finora
- Controle De Motor De Passo Unipolar E Bipolar Com Base No Pic18f1220 E MikrocDa EverandControle De Motor De Passo Unipolar E Bipolar Com Base No Pic18f1220 E MikrocNessuna valutazione finora
- Projetos Com Esp32 Programado Em Arduino - Parte ViiiDa EverandProjetos Com Esp32 Programado Em Arduino - Parte ViiiNessuna valutazione finora
- Introdução Ao Marketing DigitalDocumento23 pagineIntrodução Ao Marketing DigitalleozanhaNessuna valutazione finora
- Grupo 5 - Pavimentos Aligeirados VigadosDocumento36 pagineGrupo 5 - Pavimentos Aligeirados Vigadosjoaoluz7100% (1)
- Cópia de AE023 - (IX) - DeclExecElemConstrutivosEQualCertMaterial - ElemConstrutivosDocumento1 paginaCópia de AE023 - (IX) - DeclExecElemConstrutivosEQualCertMaterial - ElemConstrutivosjossemmardNessuna valutazione finora
- Manual de operação do controlador MCA-65 para autoclaveDocumento16 pagineManual de operação do controlador MCA-65 para autoclaveAlexandre Manga100% (1)
- Ampliação da linha de produtos da Soprano com novos interruptores e tomadasDocumento7 pagineAmpliação da linha de produtos da Soprano com novos interruptores e tomadasTen MarquesNessuna valutazione finora
- 38 Transmissao DSG Golf 1.4Documento25 pagine38 Transmissao DSG Golf 1.4AntonioNessuna valutazione finora
- Codificação de Injetores - OBD2 Diagnostics WikiDocumento2 pagineCodificação de Injetores - OBD2 Diagnostics WikiMauricioDinizNessuna valutazione finora
- Questões de P2PDocumento6 pagineQuestões de P2Pleonardo FreitasNessuna valutazione finora
- Manual do BP On-line 2 - Marinha do BrasilDocumento38 pagineManual do BP On-line 2 - Marinha do BrasilRaquel CarneiroNessuna valutazione finora
- Balança Paleteira DIGI-TRONDocumento10 pagineBalança Paleteira DIGI-TRONDIGI-TRON BalançasNessuna valutazione finora
- Desbloquear Celular2Documento5 pagineDesbloquear Celular2Moisés JoãoNessuna valutazione finora
- Manual de Operação IPM H10000Documento69 pagineManual de Operação IPM H10000Roberto Carlos BarbosaNessuna valutazione finora
- Apostila de Gesto Integrada Instrutor NR 35 MARIANA 30 05Documento362 pagineApostila de Gesto Integrada Instrutor NR 35 MARIANA 30 05lucasNessuna valutazione finora
- 4 - M1 - Funções de Um Sistema OperativoDocumento31 pagine4 - M1 - Funções de Um Sistema OperativoAndréNessuna valutazione finora
- Treinamento Básico DX100 PDFDocumento112 pagineTreinamento Básico DX100 PDFDeyler SaquettoNessuna valutazione finora
- Metodologias para Aprendizagem Ativa: Letícia Rocha MachadoDocumento16 pagineMetodologias para Aprendizagem Ativa: Letícia Rocha Machadothiago eduardo alvesNessuna valutazione finora
- Proposta de Aquisição de SolidWorks À CENOTIC AssinadoDocumento9 pagineProposta de Aquisição de SolidWorks À CENOTIC AssinadoClaimir GuinzelliNessuna valutazione finora
- Faq Unifacs Ulife Pós GraduaçãoDocumento2 pagineFaq Unifacs Ulife Pós GraduaçãoRailton CoelhoNessuna valutazione finora
- Economia Da Informacao LIVRODocumento114 pagineEconomia Da Informacao LIVROWanderlei MenezesNessuna valutazione finora
- Matriz Curricular de GeografiaDocumento24 pagineMatriz Curricular de GeografiaWelber MacedoNessuna valutazione finora
- Icru4 0RevADocumento52 pagineIcru4 0RevATiago TelesNessuna valutazione finora
- Carregador Baterias CB16SDocumento24 pagineCarregador Baterias CB16SpauloNessuna valutazione finora
- Check List - INSTALAÇÕES FÍSICASDocumento7 pagineCheck List - INSTALAÇÕES FÍSICASARTHUR De oliveira NetoNessuna valutazione finora
- Treinamento PC 5500.esquema ElétricoDocumento112 pagineTreinamento PC 5500.esquema ElétricoHarry Wart Wart100% (1)
- Mapa RUMODocumento2 pagineMapa RUMOFernando KipperNessuna valutazione finora
- Riva 2021 Luxury Design CatalogDocumento200 pagineRiva 2021 Luxury Design CatalogCarol LimaNessuna valutazione finora
- Cookies e Privacidade no SiteDocumento22 pagineCookies e Privacidade no SiteRenato Feliciano OliveiraNessuna valutazione finora
- Ceron - Critérios para Projetos de Redes e Linha Aéreas de Distribuição - It-003.04 PDFDocumento7 pagineCeron - Critérios para Projetos de Redes e Linha Aéreas de Distribuição - It-003.04 PDFEdmilson N. Dos SantosNessuna valutazione finora
- Laudo Avaliacao Fazenda BuritiDocumento53 pagineLaudo Avaliacao Fazenda BuritiWalter Rigolino100% (1)
- E-Book Amvo 2019Documento123 pagineE-Book Amvo 2019Paulo Lima100% (1)