Potrebbero piacerti anche
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- How To Configure PowerMACS 4000 As A PROFINET IO Slave With Siemens S7Documento20 pagineHow To Configure PowerMACS 4000 As A PROFINET IO Slave With Siemens S7kukaNessuna valutazione finora
- Kyle Pape - Between Queer Theory and Native Studies, A Potential For CollaborationDocumento16 pagineKyle Pape - Between Queer Theory and Native Studies, A Potential For CollaborationRafael Alarcón Vidal100% (1)
- Lesson 6 - Vibration ControlDocumento62 pagineLesson 6 - Vibration ControlIzzat IkramNessuna valutazione finora
- Economic Review English 17-18Documento239 pagineEconomic Review English 17-18Shashank SinghNessuna valutazione finora
- Scholastica: Mock 1Documento14 pagineScholastica: Mock 1Fatema KhatunNessuna valutazione finora
- Peer PressureDocumento13 paginePeer PressuremightymarcNessuna valutazione finora
- Catify To Satisfy - Simple Solutions For Creating A Cat-Friendly Home (PDFDrive)Documento315 pagineCatify To Satisfy - Simple Solutions For Creating A Cat-Friendly Home (PDFDrive)Paz Libros100% (2)
- Nanolithography - Processing Methods PDFDocumento10 pagineNanolithography - Processing Methods PDFNilesh BhardwajNessuna valutazione finora
- Pidsdps 2106Documento174 paginePidsdps 2106Steven Claude TanangunanNessuna valutazione finora
- Hans Belting - The End of The History of Art (1982)Documento126 pagineHans Belting - The End of The History of Art (1982)Ross Wolfe100% (7)
- Listen and Arrange The Sentences Based On What You Have Heard!Documento3 pagineListen and Arrange The Sentences Based On What You Have Heard!Dewi Hauri Naura HaufanhazzaNessuna valutazione finora
- Apexi Powerfc Instruction ManualDocumento15 pagineApexi Powerfc Instruction ManualEminence Imports0% (2)
- Rom 2 - 0-11 (En)Documento132 pagineRom 2 - 0-11 (En)Mara HerreraNessuna valutazione finora
- ELEVATOR DOOR - pdf1Documento10 pagineELEVATOR DOOR - pdf1vigneshNessuna valutazione finora
- 8051 NotesDocumento61 pagine8051 Notessubramanyam62Nessuna valutazione finora
- Cambridge IGCSE™: Information and Communication Technology 0417/13 May/June 2022Documento15 pagineCambridge IGCSE™: Information and Communication Technology 0417/13 May/June 2022ilovefettuccineNessuna valutazione finora
- RFID Seminar AbstractDocumento2 pagineRFID Seminar Abstractanushabhagawath80% (5)
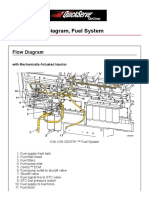
- Cummin C1100 Fuel System Flow DiagramDocumento8 pagineCummin C1100 Fuel System Flow DiagramDaniel KrismantoroNessuna valutazione finora
- Music CG 2016Documento95 pagineMusic CG 2016chesterkevinNessuna valutazione finora
- Thesis PaperDocumento53 pagineThesis PaperAnonymous AOOrehGZAS100% (1)
- Quarter 1-Week 2 - Day 2.revisedDocumento4 pagineQuarter 1-Week 2 - Day 2.revisedJigz FamulaganNessuna valutazione finora
- Miniature Daisy: Crochet Pattern & InstructionsDocumento8 pagineMiniature Daisy: Crochet Pattern & Instructionscaitlyn g100% (1)
- Apple Change ManagementDocumento31 pagineApple Change ManagementimuffysNessuna valutazione finora
- Core ValuesDocumento1 paginaCore ValuesIan Abel AntiverosNessuna valutazione finora
- Fertilization Guide For CoconutsDocumento2 pagineFertilization Guide For CoconutsTrade goalNessuna valutazione finora
- Tesco True Results Casing Running in China Results in Total Depth PDFDocumento2 pagineTesco True Results Casing Running in China Results in Total Depth PDF123456ccNessuna valutazione finora
- BrochureDocumento3 pagineBrochureapi-400730798Nessuna valutazione finora
- Man As God Created Him, ThemDocumento3 pagineMan As God Created Him, ThemBOEN YATORNessuna valutazione finora
- Canoe Matlab 001Documento58 pagineCanoe Matlab 001Coolboy RoadsterNessuna valutazione finora
- Congenital Cardiac Disease: A Guide To Evaluation, Treatment and Anesthetic ManagementDocumento87 pagineCongenital Cardiac Disease: A Guide To Evaluation, Treatment and Anesthetic ManagementJZNessuna valutazione finora