Potrebbero piacerti anche
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5795)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Manual de Partes GD, EAYQVD 500 H PDocumento39 pagineManual de Partes GD, EAYQVD 500 H Pcarlos barreraNessuna valutazione finora
- BS en 755-7 PDFDocumento6 pagineBS en 755-7 PDFRok HermanNessuna valutazione finora
- Design of Piping Systems - MW KelloggDocumento402 pagineDesign of Piping Systems - MW KelloggSridhar Mahalingam100% (30)
- Spare Parts List and Exploded View PumpDocumento6 pagineSpare Parts List and Exploded View PumpFrancisco Perez VaroNessuna valutazione finora
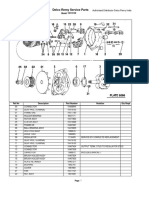
- Delco Remy Service Parts: New Indo Trading Company Authorised Distributor Delco Remy IndiaDocumento2 pagineDelco Remy Service Parts: New Indo Trading Company Authorised Distributor Delco Remy IndiaWilson AcostaNessuna valutazione finora
- Vent Master Cam C InjeccionDocumento2 pagineVent Master Cam C InjeccionFreddy VeraNessuna valutazione finora
- ASTM A1034 A1034M 2010a (Reapproved 2015)Documento5 pagineASTM A1034 A1034M 2010a (Reapproved 2015)Mukesh kumarNessuna valutazione finora
- Panel Mounting Valve M5 DPDocumento2 paginePanel Mounting Valve M5 DPBiswanath LenkaNessuna valutazione finora
- 2019 G 2.0 MPI NU Schematic Diagrams Brake System Anti-Lock Brake System (ABS) Schematic DiagramsDocumento1 pagina2019 G 2.0 MPI NU Schematic Diagrams Brake System Anti-Lock Brake System (ABS) Schematic DiagramsbeongoNessuna valutazione finora
- Jis G3141Documento0 pagineJis G3141johnnyquest_86Nessuna valutazione finora
- Quantum Physics 130 - Notes - James BransonDocumento548 pagineQuantum Physics 130 - Notes - James BransonRenan Alves0% (1)
- VIT MES Elements Coaching Notes 1and 2Documento512 pagineVIT MES Elements Coaching Notes 1and 2Solayao, Jan Marvin J.Nessuna valutazione finora
- Design CalculationDocumento13 pagineDesign CalculationSunil KumarNessuna valutazione finora
- Top and Cabinet Parts: For Model: 3RLSQ8033SW2 (White/Grey)Documento13 pagineTop and Cabinet Parts: For Model: 3RLSQ8033SW2 (White/Grey)CristianNessuna valutazione finora
- NR467 - C1 - 2018-07 BV RulesDocumento568 pagineNR467 - C1 - 2018-07 BV Rulesmlaouhi majedNessuna valutazione finora
- FE700 Installation Manual Echo SounderDocumento58 pagineFE700 Installation Manual Echo SounderNidhin.c.prakashNessuna valutazione finora
- Aircycle 5.1 - Heat Recovery UnitDocumento2 pagineAircycle 5.1 - Heat Recovery UnitValentin MalihinNessuna valutazione finora
- Blind Flange DesignDocumento1 paginaBlind Flange DesignSachin5586Nessuna valutazione finora
- Razzaq - Load and Resistance Factor Design (LRFD) Approach For Reinforced-Plastic Channel Beam BucklingDocumento9 pagineRazzaq - Load and Resistance Factor Design (LRFD) Approach For Reinforced-Plastic Channel Beam Bucklingc_passerino6572Nessuna valutazione finora
- SC-01 Safety Code On Storage, Handling & Use of Gas CylindersDocumento8 pagineSC-01 Safety Code On Storage, Handling & Use of Gas CylindersSandeep ShettyNessuna valutazione finora
- Training Manual - S8000 Complete (Tier 3) PDFDocumento26 pagineTraining Manual - S8000 Complete (Tier 3) PDFJUNA RUSANDI S100% (1)
- 528N - Electrically Non-Conductive Hose: Performance Exceeds SAE 100 R8 / ISO 3949 Type R8 / DIN EN 855 Type R8Documento1 pagina528N - Electrically Non-Conductive Hose: Performance Exceeds SAE 100 R8 / ISO 3949 Type R8 / DIN EN 855 Type R8Jas SumNessuna valutazione finora
- Cross Flow Part 1Documento5 pagineCross Flow Part 1mohmmad othmanNessuna valutazione finora
- Atlas Copco Milestones EnglishDocumento1 paginaAtlas Copco Milestones EnglishAtlas Copco Compressor Technique100% (1)
- DENSO Robotics Datasheet VS-G Series PDFDocumento2 pagineDENSO Robotics Datasheet VS-G Series PDFjohnNessuna valutazione finora
- Multi Pump Test Rig Positive Displacement Plunger PumpDocumento9 pagineMulti Pump Test Rig Positive Displacement Plunger PumpDaniel IsmailNessuna valutazione finora
- Alvarado Full Height Single Turnstile ManualDocumento44 pagineAlvarado Full Height Single Turnstile ManualALVER CARDENASNessuna valutazione finora
- Physics Problem Solving ExampleDocumento3 paginePhysics Problem Solving Examplenathaniel borlazaNessuna valutazione finora
- 6stroke EngineDocumento5 pagine6stroke EngineMitesh KumarNessuna valutazione finora
- Solving Kitchen Ventilation ProblemsDocumento6 pagineSolving Kitchen Ventilation ProblemsJohn DiasNessuna valutazione finora