Potrebbero piacerti anche
- MatricesDocumento41 pagineMatricesPaul Mozart100% (1)
- 1 MathDocumento67 pagine1 MathKhalid GreenNessuna valutazione finora
- Leep 203Documento23 pagineLeep 203sanagavarapuNessuna valutazione finora
- Lesson 10 Centroids and Center of GravityDocumento8 pagineLesson 10 Centroids and Center of GravityKristine PanlilioNessuna valutazione finora
- Solutions CH 03Documento10 pagineSolutions CH 03JoonKwonNessuna valutazione finora
- matrixAlgebraReview PDFDocumento16 paginematrixAlgebraReview PDFRocket FireNessuna valutazione finora
- Advanced Level Questions Class-12Documento16 pagineAdvanced Level Questions Class-12jitender8Nessuna valutazione finora
- Matrices WDocumento21 pagineMatrices WNur SyahadahNessuna valutazione finora
- NC 10Documento12 pagineNC 10Hamid RehmanNessuna valutazione finora
- Matdas Meet 6-7Documento13 pagineMatdas Meet 6-7MukhammadKhafidNessuna valutazione finora
- Term Paper of MathDocumento11 pagineTerm Paper of MathAnkesh GoyalNessuna valutazione finora
- Chapterwise A' Level Questions: By: OP GUPTA (+91-9650 350 480) For Class XiiDocumento16 pagineChapterwise A' Level Questions: By: OP GUPTA (+91-9650 350 480) For Class XiiharshilNessuna valutazione finora
- MIT18 06S10 Final AnswersDocumento14 pagineMIT18 06S10 Final AnswersandreaskailinaNessuna valutazione finora
- Matrix Algebra: Harvey Mudd College Math TutorialDocumento6 pagineMatrix Algebra: Harvey Mudd College Math TutorialArtist RecordingNessuna valutazione finora
- MatlabDocumento50 pagineMatlabOleg ZenderNessuna valutazione finora
- Revision MCII 08-02-2015 PDFDocumento62 pagineRevision MCII 08-02-2015 PDFVanushaNessuna valutazione finora
- Appendix: - This HasDocumento5 pagineAppendix: - This HasAbdulHafizK.Nessuna valutazione finora
- Matrices and Linear Algebra L-1Documento4 pagineMatrices and Linear Algebra L-1Farid HossainNessuna valutazione finora
- Arfken Weber Math Selected Problem SolutionDocumento79 pagineArfken Weber Math Selected Problem Solutionalirezatehrani79% (14)
- AlgebraDocumento22 pagineAlgebraJin Ping100% (1)
- Fundamentos MatematicaDocumento57 pagineFundamentos MatematicaJA C FNessuna valutazione finora
- PHYS 510 A: Mathematical Methods of Physics Homework #1 Kristin Kathleen Creech LassondeDocumento35 paginePHYS 510 A: Mathematical Methods of Physics Homework #1 Kristin Kathleen Creech LassondeKristin Kathleen Creech Lassonde100% (1)
- 1 Matrices and Determinants SJKDocumento40 pagine1 Matrices and Determinants SJKannas04100% (1)
- Various Types of Matrices: DeterminantDocumento5 pagineVarious Types of Matrices: DeterminantFarid HossainNessuna valutazione finora
- Solutions To Practice Session 7 (Week 7) : 2013 The University of SydneyDocumento5 pagineSolutions To Practice Session 7 (Week 7) : 2013 The University of SydneydivaaaaaaaaaNessuna valutazione finora
- Hayt8e SM Ch1Documento11 pagineHayt8e SM Ch1Kevin KanzelmeyerNessuna valutazione finora
- p11 AnsDocumento8 paginep11 AnsAnonymous ncBe0B9bNessuna valutazione finora
- Review Exercise 2Documento19 pagineReview Exercise 2eventra bangladeshNessuna valutazione finora
- DeterminantDocumento14 pagineDeterminantNindya SulistyaniNessuna valutazione finora
- Math2061 Practice Session 1Documento5 pagineMath2061 Practice Session 1dddddddaNessuna valutazione finora
- Arfken Solutions 2Documento79 pagineArfken Solutions 2Karen Valadez0% (1)
- Iit - Jee Model Grand Test - Ii Paper - 1 SolutionsDocumento6 pagineIit - Jee Model Grand Test - Ii Paper - 1 SolutionsSayan Kumar KhanNessuna valutazione finora
- Matrix Matrix OpnDocumento20 pagineMatrix Matrix OpnVinod NambiarNessuna valutazione finora
- c1 Linear AlgebraDocumento33 paginec1 Linear AlgebraChua ZhenyuNessuna valutazione finora
- Matrix by SalamatullahDocumento6 pagineMatrix by SalamatullahANJANA SHARMANessuna valutazione finora
- Pre-Calculus / Math Notes (Unit 15 of 22)Documento14 paginePre-Calculus / Math Notes (Unit 15 of 22)OmegaUserNessuna valutazione finora
- 1 Determinants: A Ab CDDocumento10 pagine1 Determinants: A Ab CDssNessuna valutazione finora
- Chapter Practice Problems: Straight LinesDocumento5 pagineChapter Practice Problems: Straight LinesvishwaiitkNessuna valutazione finora
- Problem Set 2.2 Continued... : R 2R +R, R 6R 9RDocumento3 pagineProblem Set 2.2 Continued... : R 2R +R, R 6R 9RBook HouseNessuna valutazione finora
- Matrix PDFDocumento10 pagineMatrix PDFLaura ChandraNessuna valutazione finora
- MAT1503 Exam SolutionsDocumento93 pagineMAT1503 Exam Solutionsd_systemsuganda100% (1)
- Solving Systems of Linear EquationsDocumento9 pagineSolving Systems of Linear EquationsGebrekirstos TsegayNessuna valutazione finora
- DiffGeo and Planetary MotionDocumento99 pagineDiffGeo and Planetary MotionJanusz SiodaNessuna valutazione finora
- Appendix: Useful Mathematical Techniques: A.1 Solving TrianglesDocumento23 pagineAppendix: Useful Mathematical Techniques: A.1 Solving Trianglessaleemnasir2k7154Nessuna valutazione finora
- Linear Algebra Cheat SheetDocumento2 pagineLinear Algebra Cheat SheettraponegroNessuna valutazione finora
- Matrices and DeterminantsDocumento40 pagineMatrices and DeterminantsMonte Carlo Palado100% (1)
- Form 5 Additional Maths NoteDocumento10 pagineForm 5 Additional Maths NoteEric WongNessuna valutazione finora
- Class 3: Inverses and Determinants Inverses: NP PNDocumento7 pagineClass 3: Inverses and Determinants Inverses: NP PNQasim AliNessuna valutazione finora
- Chapter 6mm34 CasDocumento15 pagineChapter 6mm34 CasEric MoralesNessuna valutazione finora
- Inmo Sol 2000Documento5 pagineInmo Sol 2000ashu_dwy8605Nessuna valutazione finora
- Basics of Linear Algebra Lec-1Documento12 pagineBasics of Linear Algebra Lec-1Ameen MazumderNessuna valutazione finora
- M 408M - Calculus Quest SolutionsDocumento13 pagineM 408M - Calculus Quest Solutionsbrargolf50% (2)
- Appendix and IndexDocumento104 pagineAppendix and IndexkankirajeshNessuna valutazione finora
- Matrices with MATLAB (Taken from "MATLAB for Beginners: A Gentle Approach")Da EverandMatrices with MATLAB (Taken from "MATLAB for Beginners: A Gentle Approach")Valutazione: 3 su 5 stelle3/5 (4)
- Ten-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesDa EverandTen-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesNessuna valutazione finora
- A Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"Da EverandA Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"Valutazione: 2.5 su 5 stelle2.5/5 (2)
- Wa0001Documento3 pagineWa0001Michael AjayiNessuna valutazione finora
- PLC ProgrammingDocumento116 paginePLC ProgrammingVali Ene100% (4)
- Asme 2 EjDocumento4 pagineAsme 2 EjMichael AjayiNessuna valutazione finora
- ITMA011 - Study Guide (V1.0)Documento165 pagineITMA011 - Study Guide (V1.0)Michael AjayiNessuna valutazione finora
- Ieeetran HowtoDocumento26 pagineIeeetran HowtoAnderson Soares AraujoNessuna valutazione finora
- SubfigDocumento75 pagineSubfigrere12qw2Nessuna valutazione finora
- Preparation of Papers For IEEE Sponsored Conferences & SymposiaDocumento3 paginePreparation of Papers For IEEE Sponsored Conferences & SymposiaHoang-Long CaoNessuna valutazione finora
- Working With Arduino HardwareDocumento65 pagineWorking With Arduino HardwareAkik BiswasNessuna valutazione finora
- Electronics Exercise 2: The 555 Timer and It's Applications: ObjectiveDocumento5 pagineElectronics Exercise 2: The 555 Timer and It's Applications: ObjectiveMichael AjayiNessuna valutazione finora
- Biometrics Is The Science and Technology of Measuring and Analyzing Biological DataDocumento1 paginaBiometrics Is The Science and Technology of Measuring and Analyzing Biological DataMichael AjayiNessuna valutazione finora
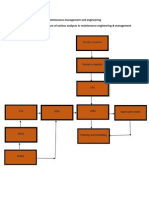
- Image Quality Analysis - AssignmentDocumento11 pagineImage Quality Analysis - AssignmentMichael AjayiNessuna valutazione finora
- 10 1 1 76Documento7 pagine10 1 1 76Michael AjayiNessuna valutazione finora
- 05158296Documento6 pagine05158296Michael AjayiNessuna valutazione finora
- WAM ES Screw Conveyors Manual JECDocumento43 pagineWAM ES Screw Conveyors Manual JECabbas tawbiNessuna valutazione finora
- List of Important Books of PhysicsDocumento6 pagineList of Important Books of PhysicsAbubakar Mughal0% (1)
- Bug Life Cycle in Software TestingDocumento2 pagineBug Life Cycle in Software TestingDhirajNessuna valutazione finora
- DD 3334Documento2 pagineDD 3334FAQMD2Nessuna valutazione finora
- High Performance Vector Control SE2 Series InverterDocumento9 pagineHigh Performance Vector Control SE2 Series InverterhanazahrNessuna valutazione finora
- Soil Liquefaction Analysis of Banasree Residential Area, Dhaka Using NovoliqDocumento7 pagineSoil Liquefaction Analysis of Banasree Residential Area, Dhaka Using NovoliqPicasso DebnathNessuna valutazione finora
- Corometrics 170 Series BrochureDocumento3 pagineCorometrics 170 Series BrochureCesar MolanoNessuna valutazione finora
- Lecture 11 - Performance AppraisalsDocumento23 pagineLecture 11 - Performance AppraisalsCard CardNessuna valutazione finora
- Curriculum Improvement v2Documento47 pagineCurriculum Improvement v2Nica Lagrimas100% (1)
- Classroom Debate Rubric Criteria 5 Points 4 Points 3 Points 2 Points 1 Point Total PointsDocumento1 paginaClassroom Debate Rubric Criteria 5 Points 4 Points 3 Points 2 Points 1 Point Total PointsKael PenalesNessuna valutazione finora
- Overview of MEMDocumento5 pagineOverview of MEMTudor Costin100% (1)
- Formula Renault20 Mod00Documento68 pagineFormula Renault20 Mod00Scuderia MalatestaNessuna valutazione finora
- SKF CMSS2200 PDFDocumento2 pagineSKF CMSS2200 PDFSANTIAGONessuna valutazione finora
- Machine Design REE 302: CH 1: Introduction To Mechanical Engineering DesignDocumento26 pagineMachine Design REE 302: CH 1: Introduction To Mechanical Engineering DesignDull PersonNessuna valutazione finora
- Effect of Heater Geometry On The High Temperature Distribution On A MEMS Micro-HotplateDocumento6 pagineEffect of Heater Geometry On The High Temperature Distribution On A MEMS Micro-HotplateJorge GuerreroNessuna valutazione finora
- Hayek - Planning, Science, and Freedom (1941)Documento5 pagineHayek - Planning, Science, and Freedom (1941)Robert Wenzel100% (1)
- IDL6543 ModuleRubricDocumento2 pagineIDL6543 ModuleRubricSteiner MarisNessuna valutazione finora
- OOPS KnowledgeDocumento47 pagineOOPS KnowledgeLakshmanNessuna valutazione finora
- 3.1 MuazuDocumento8 pagine3.1 MuazuMon CastrNessuna valutazione finora
- He Sas 23Documento10 pagineHe Sas 23Hoorise NShineNessuna valutazione finora
- INSTRUCTIONAL SUPERVISORY PLAN 1st Quarter of SY 2023 2024 Quezon ISDocumento7 pagineINSTRUCTIONAL SUPERVISORY PLAN 1st Quarter of SY 2023 2024 Quezon ISayongaogracelyflorNessuna valutazione finora
- Demonstration of Preprocessing On Dataset Student - Arff Aim: This Experiment Illustrates Some of The Basic Data Preprocessing Operations That Can BeDocumento4 pagineDemonstration of Preprocessing On Dataset Student - Arff Aim: This Experiment Illustrates Some of The Basic Data Preprocessing Operations That Can BePavan Sankar KNessuna valutazione finora
- GoodElearning TOGAF Poster 46 - Adapting The ADMDocumento1 paginaGoodElearning TOGAF Poster 46 - Adapting The ADMFabian HidalgoNessuna valutazione finora
- Citroen CX Manual Series 2 PDFDocumento646 pagineCitroen CX Manual Series 2 PDFFilipe Alberto Magalhaes0% (1)
- Science, Technology and Society Module #1Documento13 pagineScience, Technology and Society Module #1Brent Alfred Yongco67% (6)
- Sim Educ101Documento101 pagineSim Educ101Rolando AmadNessuna valutazione finora
- Case Study III - MichelinDocumento15 pagineCase Study III - MichelinfreitzNessuna valutazione finora
- Electronics 12 00811Documento11 pagineElectronics 12 00811Amber MishraNessuna valutazione finora
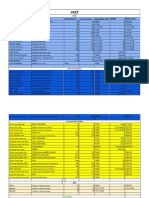
- Jazz PrepaidDocumento4 pagineJazz PrepaidHoney BunnyNessuna valutazione finora
- Eurocode Conference 2023 Seters Van Eurocode 7Documento33 pagineEurocode Conference 2023 Seters Van Eurocode 7Rodolfo BlanchiettiNessuna valutazione finora